机械设计基础第5版杨可桢
杨可桢《机械设计基础》(第5版)笔记和课后习题(轮系)
图 5-3 解:这是一个定轴轮系,由题意可得:
1 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
反转原理:给周转轮系施以附加的公共角速度 H 后,不改变轮系中各构件之间的相
对运动,原轮系将转化成为一假想的定轴轮系,由此可按定轴轮系的公式计算该新轮系的传
动比。
设周转轮系中两个太阳轮分别为 G、K,行星架为 H,则其转化轮系的传动比:
圣才电子书 十万种考研考证电子书、题库视频学习平台
第5章 轮 系
5.1 复习笔记
一、轮系的类型 轮系是指由一系列齿轮组成的传动系统。 根据轮系运转时各个齿轮轴线相对于机架位置是否固定,分为三类: 1.定轴轮系:轮系中各齿轮轴线相对于机架均为固定,又分为平面定轴轮系和空间定 轴轮系。 2.周转轮系:轮系中至少有一个齿轮轴线位置不固定,而是绕着其他齿轮的固定轴线 回转。周转轮系由太阳轮、行星轮、系杆及机架组成,又可分为差动轮系(自由度为 2)和 行星轮系(自由度为 1)。 3.复合轮系:既包含定轴轮系,又包含周转轮系,或者是由几部分周转轮系组成。 根据轮系中各轮几何轴线在空间的相对位置,分为两类:平面轮系和空间轮系。
图 5-2
5-2 在图 5-3 所示轮系中,已知 z1=15,z2=25, z2' =15,z3=30, z3' =15z4=30, z4' =2(右 旋),z5=60, z5' =20(m=4 mm),若 n1=500 r/min,求齿条 6 线速度 v 的大小和方向。
3 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
(5)空间周转轮系中,由于角速度矢量与系杆的角速度矢量不平行,所以不能用代数 法相加减。但是不影响基本构件之间传动比的计算。
杨可桢《机械设计基础》(第5版)笔记和课后习题(轴)
第 14 章 轴
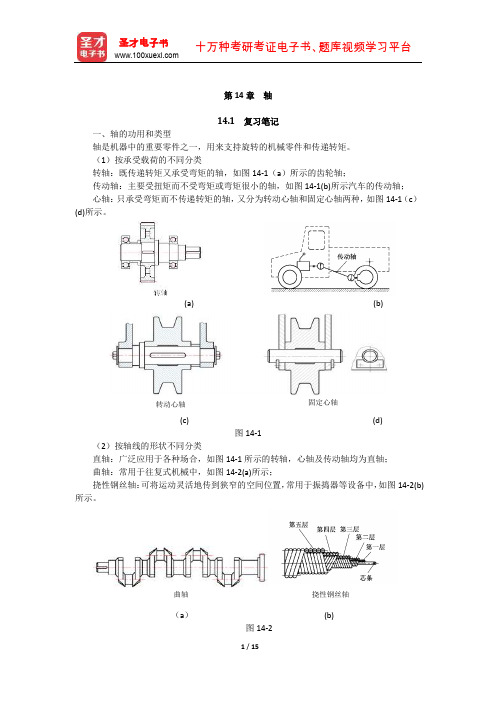
14.1 复习笔记 一、轴的功用和类型 轴是机器中的重要零件之一,用来支持旋转的机械零件和传递转矩。 (1)按承受载荷的不同分类 转轴:既传递转矩又承受弯矩的轴,如图 14-1(a)所示的齿轮轴; 传动轴:主要受扭矩而不受弯矩或弯矩很小的轴,如图 14-1(b)所示汽车的传动轴; 心轴:只承受弯矩而不传递转矩的轴,又分为转动心轴和固定心轴两种,如图 14-1(c) (d)所示。
图 14-6 ④轴端挡圈:固定轴端零件,可承受较大轴向力,如图 14-7 所示。
图 14-7 ⑤当轴向力较小时,也可采用弹性挡圈或紧定螺钉进行零件的轴向固定,分别如图 14-8 所示。
3 / 15
圣才电子书 十万种考研考证电子书、题库视频学习平台
弹性挡圈
紧定螺钉
图 14-8 (2)轴上零件的周向固定 常采用的周向固定的零件有:键、花键、销、过盈配合、紧定螺钉等。常见的几种结构 分别如图 14-9 所示。
圆角或加装隔离环;对于轴与轮毂的过盈配合,可在轮毂上或轴上采用过渡肩环或开减载槽。 分别如图 14-11 所示。
键连接
花键连接
销连接
过盈连接
弹性环连接
型面连接
图 14-9 其中,采用键连接时,应使各轴段键槽在同一母线上,如图 14-10 所示;紧定螺钉只用 在传力不大之处。
图 14-10 3.各轴段的直径和长度的确定 (1)轴径的确定 按轴所受的扭矩来初步估计轴所需的直径,将初步求出的直径作为承受扭矩的轴段的最 小直径,然后按轴上零件的装配方案和定位要求,逐步确定各段轴直径。其中,有配合要求 的轴段,应尽量采用标准直径。 (2)各轴段长度的确定 各轴段的长度尺寸,主要由轴上零件与轴配合部分的轴向尺寸、相邻零件之间的距离、 轴向定位以及轴上零件的装配和调整空间等因素决定。基本原则:保证零件所需装配空间的 同时应尽量使轴的结构紧凑。 4.提高轴强度的常用措施 (1)合理布置轴上的零件以减小轴的载荷。 措施:传动件应尽量靠近轴承,尽可能不采用悬臂的支承形式;力求缩短支承跨距及悬
管理学机械设计基础第五版杨可桢版第一章平面机构的自由度和速度分析
两构件组成的运动副,不外乎通过点、线或面 的接触来实现。按照接触特性,通常把运动副分为 高副和低副。
1.低副:凡两构件以面接触构成的运动副称为低副, 平面机构中的低副有转动副和移动副两种。 (1)转动副:组成运动副的两构件只能在一个平面 内相对转动,这种运动副称为转动副,或称铰链。
讲授方法:
多媒体课件。
§1-1 运动副及其分类
1.1 自由度
y
O
x
如图,处于xoy坐标系中的一个作平面运动的自由 自由构件S具有三个独立的运动,即沿x轴、y轴方向的 移动和绕A点的转动。这种相对于参考系构件所具有的 独立运动称为构件的自由度。
一个作平面运动的自由构件有三个自由度。
1.2 运动副及其分类
下面通过具体的例子说明机构运动简图的绘 制方法。
四、绘制机构运动简图的步骤
机构运动简图必须与原机构具有完全相同的运 动特性,忽略对运动没有影响的构件的外形和运动 副具体构造。只有这样我们才可以根据运动简图对 机构进行运动分析和受力分析。为了达到这一要求, 绘制运动简图要遵循以下步骤:
⑴.根据机构的实际结构和运动情况,找出机构的原动件(即作独立运 动的构件)及工作执行构件(即输出运动的构件); ⑵.确定机构的传动部分,即确定构件数、运动副、类型和位置; ⑶.确定机架,并选定多数机构的运动平面作为绘制简图的投影面; ⑷.选择合适的比例尺,用构件和运动副的符号正确绘制出运动简图。
教学目标:
1.了解机构的组成,搞清运动副、运动链、约束和 自由度、速度瞬心的概念; 2.能绘制常用平面机构的运动简图; 3.能计算平面机构的自由度; 4.平面机构具有确定运动的条件; 5. 应用瞬心法进行机构的速度分析。
教学重点和难点 :
机械设计基础第5版-杨可桢等-第04章 齿轮机构讲解

分
度 为了便于设计、制造及互换,规定
某一圆上的dk/和k为标准值。
圆
记为:分度圆d: 压力角
模 数 m=p/
1.我国规定=20;
2.模数:标准系列(见下表),模数又是轮 齿抗弯能力的重要标志。
表4.3 标准模数系列(GB 1357-87)
全齿高h
h = ha + hf
②齿顶高系数(ha*) 和顶隙系数(c*)
齿顶高ha ha*m 齿顶高hf (ha* c*)m 式中ha*、c*分别称为齿顶高系数和顶隙系数。
对于圆柱齿轮,其标准值按正常齿制和短齿制规定 如下:
表4-2 渐开线圆柱齿轮的齿顶高系数和顶隙系数
正常齿制
短齿制
rb 2 rb1
2
O2
3.中心距变化不影响传动比
中心距
r'1
简单证明:
O1
1
rb1
N1
i12
1 2
r2' r1'
rb 2 rb1
n N2
CK E1
E2
因为齿廓加工完毕,
rb 2
r' 2
基圆不变, 即rb1和rb2不变
2
O2
n
a'
演示
a' r1' 2 r' 2
2
O2
啮合点K的变化4
O1
r'1 1
rb1
n
N1
K E1
n N2
rb 2
E2 r' 2
2
O2
1.啮合线为一条直线
O1
啮合线——啮合点的轨迹。
机械设计基础第5版杨可桢(10)

m1
mb T’ l l’ l”
m2 T”
Fb' l ' Fb" l "
将 l l ' l " 代入求解,得:
l" F Fb l l' " Fb Fb l
' b
消去公因子 ω2,得:
r’b
F’b
rb
F”b Fb
r”b
l" m r mb rb l l' " " mb rb mb rb l
1
F’3 m’3r3 m’br’b m’2r2 m’1r1
l’1
m”3r3
m”2r2
作图法求解
m’br’b + m’1r1 + m’2r2+ m’3r3 = 0 m”br”b + m”1r1 + m”2r2+ m”3r3 = 0
空间力系的平衡
天津工业大学专用
m”1r1 m”br”b
两个平面汇交力系的平衡问题。
mge = 0
该回转件在任意位置将保持静止: m1 静平衡或单面平衡 平衡面内不允许安装平衡 配重时,可分解到任意两个平 衡面内进行平衡。
T’
m m2
T”
天津工业大学专用
作者: 潘存云教授
由理论力学可知:一个力可以分 解成两个与其平行的两个分力。 两者等效的条件是: Fb' Fb" Fb
m
ω ω
ω
平衡原理:在重心的另一侧加上一定的质量,或在重 心同侧去掉一些质量,使质心位置落在回转轴线上, 而使离心惯性力达到平衡。
天津工业大学专用 作者: 潘存云教授
平衡计算方法: 同一平面内各重物所产生的离心惯性力构成一个平 面汇交力系: Fi
杨可桢《机械设计基础》(第5版)笔记和课后习题(间歇运动机构)

第6章 间歇运动机构6.1 复习笔记主动件连续运动(连续转动或连续往复运动)时,从动件做周期性时动、时停运动的机构成为间歇运动机构。
一、棘轮机构如图6-1所示,机构是由棘轮2、棘爪3、主动摆杆和机架组成的。
运动原理:主动棘爪作往复摆动,从动棘轮作单向间歇转动。
优点:结构简单、制造方便、运动可靠、棘轮轴每次转过角度的大小可以在较大范围内调节。
缺点:工作时有较大的冲击和噪音,运动精度较差。
因此棘轮机构适用于速度较低和载荷不大的场合。
棘轮机构按结构形式分:齿式棘轮机构和摩擦式棘轮机构;按啮合方式分:外啮合棘轮机构和内啮合机构;按运动形式分:单动式棘轮机构、双动式棘轮结构和双向式棘轮机构。
图6-1 棘轮机构1.棘爪工作条件在工作行程中,为了使棘爪能顺利进入棘轮的齿底,应满足:90αϕ>︒+-∑其中,α为棘齿的倾斜角,ϕ为摩擦角,∑为棘爪轴心和棘轮轴心与棘轮齿顶点的连线之间的夹角。
为了使传递相同的转矩时棘爪受力最小,一般取90∑=︒,为保证棘轮正常工作,使棘爪啮紧齿根,则有:αϕ>2.棘轮、棘爪的几何尺寸计算选定齿数z 和确定模数m 之后,棘轮和棘爪的主要几何尺寸计算公式如下: 顶圆直径 D m z =;齿高 0.75h m =;齿顶厚 a m =; 齿槽夹角6055θ=︒︒或;棘爪长度 2=L m π。
二、槽轮机构如图6-2中所示,该机构是由带圆销的主动拨盘1、带有径向槽的从动槽轮2以及机架组成的。
其中,拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧都是起锁定作用。
工作特点:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动,实现了将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。
因槽轮运动过程中角速度有变化,存在柔性冲击,因此不适合高速运动场合。
图6-2 槽轮机构运动特性系数τ:槽轮每次运动的时间m t 对主动构件回转一周的时间t 之比,有:m 2=2-=t z t zτ 其中,z 为槽数,是槽轮机构的主要参数。
杨可桢《机械设计基础》(第5版)笔记和课后习题(机械运转速度波动的调节)

a
a
Aoa
(M M )d
0
0 M (y y)dx M [S1]
2 / 10
圣才电子书 十万种考研考证电子书、题库视频学习平台
依次分别求得各区间内的盈亏功,可作出该周期内的能量指示图,如图 7-2(b)所示。 若 M′>M″,则出现盈功,机器的动能增加,图(b)上标注正号;若 M′<M″,则出 现亏功,机器的动能减少,图(b)上标注负号。能量指示图(b)中最高点和最低点的距离
B
4m D2
3 / 10
圣才电子书 十万种考研考证电子书、题库视频学习平台
7.2 课后习题详解
7-1 图 7-4 所示为作用在多缸发动机曲轴上的驱动力矩 M′和阻力矩 M″的变化曲线, 其驱动力矩曲线与阻力矩曲线围成的面积顺次为
,该图的比例尺
,设曲
柄平均转速为 120 r/mm,其瞬时角速度不超过其平均角速度的±3%,求装在该曲柄轴上 的飞轮的转动惯量。
图 7-4 解:根据题意做出能量指示图,如图 7-5 所示,由图可知该机械系统的最大盈亏功:
Amax 520 190 390 720N m
平均角速度
,机械运转速度不均匀系数
。
由公式
可得,飞轮的转动惯量:
。
图 7-5 7-2 在电动机驱动的剪床中,已知作用在剪床主轴上的阻力矩 M″的变化规律如图 7-6 所示。设驱动力矩 M′等于常数,剪床主轴转速为 60 r/min,机械运转速度不均匀系数 δ=0.15。求:(1)驱动力矩 M′的数值;(2)安装在主轴上的飞轮转动惯量。
max min m
2.飞轮设计的基本原理 飞轮设计要解决的问题:已知作用在主轴上的驱动力矩和阻力矩的运动规律,要求在机 械运转速度不均匀系数δ的容许范围内,确定安装在主轴上的飞轮的转动惯量。 安装在主轴上的飞轮转动惯量为:
机械设计基础复习资料杨可桢

The answer of schoolwork of MECHINE THEORY AND DESIGN (Just for reference)教材:杨可桢(第五版)教师:邓嵘时间:200809~200811目录Chapter 1 (1)Chapter 2 (4)2-1 (4)2-2 (4)2-3 (5)2-4 (5)2-5 (6)2-7 (6)2-10 (6)2-13 (6)Chapter3 (7)3-1 (7)3-2 (7)3-4(简单,略) (7)Chapter4 (8)4-1 (8)4-2 (8)4-3 (8)4-4 (8)4-5 (9)4-6 (9)4-8 (9)4-9 (10)4-10 (10)4-14 (11)Chapter5 (11)5-1 (11)5-2 (12)5-3 (12)5-4 (12)5-5 (13)5-6 (13)5-7 (13)5-8 (14)5-9 (14)5-10 (14)5-14 (15)5-15 (15)Chapter 13,4,0321L H L H n p p F n p p ====--=3,4,0321L H L H n p p F n p p ====--=3,4,0321L H L H n p p F n p p ====--=3,4,0321L H L H n p p F n p p ====--=1-11-21-31-41109,12,2,3(2)1L H L H n P P F n P P -====-+=、194,4,2,3(2)2L H L H n P P F n P P -====-+=、186,8,1,3(2)1L H L H n P P F n P P -====-+=、178,11,0,3(2)2L H L H n P P F n P P -====-+=、168,11,1,3(2)1L H L H n P P F n P P -====-+=、156,8,1,3(2)1L H L H n P P F n P P -====-+=、141221241232322423116c p p p p p v v v p p ωωω====-、A ω1B 341 2C1241222114122115p p r r p p ωω-==、3113141142/v p p m sω-==、13341313141134p p p p ωω-==、3(2)3L H L H F n P P =-+=1114,4,2,3(2)2L H L H n P P F n P P -====-+=、Chapter 22-1)401107090)))a b c d +<+∴Q 、,并且最短杆为机架,是双曲柄机构;、曲柄摇杆机构、双摇杆机构、双摇杆机构2-2转动导杆机构条件:AB BC l e l +≤2-4000018030 1.418030K +==-71),51.4t t ==、设空回行程需秒 2)75125+=、一转所需的时间是秒,一分钟曲柄转转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
天津工业大学专用
单万向联轴器
设计:潘存云
作者: 潘存云教授
结构特点:两传动轴末端各有一个叉形支架,用铰链
与中间的“十字形”构件相联,“十字形”构件的中
心位于两轴交点处轴,间角为
α=0~45˚
α
运动分析
设计:潘存云
eate两瞬d时轴w传平ith动均A比传sp是动os动比e.态为Sl变1Eid,v化ea但sl的ufoa。rti.oNnEoTnl3y..5 Client Profile 5.2.0
vB1 = Cr”oωp1yr=igωh1t r2c0o0s4α-2011 Aspose Pty Ltd.
同样有 vB1 = vB2
代入得 ω’’2=ω1 cosα
ω”2 <ω1
其它位置
ω1cos α ≤ ω2 ≤
ω1 cosα
天津工业大学专用
作者: 潘存云教授
2.双万向铰链机构 为了消除从动轴变速转动的缺点,常 将两个单万向铰链机构串联使用, 构成双万向铰链机构。 安装要求 ①主动、从动、中间三轴共面;
轴向位移、潮湿多尘的场合。
止退垫板
天津工业大学专用
轮胎环
作者: 潘存云教授
§17-5 牙嵌式离合器
结构:由端面带牙的固定套筒、活动套筒、对中环组成。 工作原理:
利用操纵杆移动滑环,实现两套筒的结合与分离。
固定套筒
活动套筒
Evaluation only. 滑环 eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0轴向x设计:潘存云α
y 设计:潘存云
α
天津工业大学专用
作者: 潘存云教授
一、齿式联轴器
结构:两个有内齿的外壳,两个有外齿的套筒,两者齿 数相同,外齿做成球形齿顶的腰鼓齿。套筒与轴用键联 接,两外壳用螺栓联接。两端密封,空腔内储存润滑油。
功用:能补偿轴不对中和偏斜。
工作范围:正常齿:Evαa≤lua3t0i’on only. eated with Asp腰o鼓se齿.Sl:idαes≤fo3r˚ .NET 3.5 Client Profile 设计:潘存云 5.2.0
第17章 联轴器、离合器和制动器
§17-1 联轴器、离合器的类型和应用 §17-2 固定式刚性联轴器 §17-3 可移动刚性联轴器 §17-4 弹性E联va轴lu器ation only. eated§wi1th7-A5spos牙e.嵌Sli式de离s f合or 器.NET 3.5 Client Profile 5.2.0 §17C-6opyr摩igh擦t 2离00合4-器2011 Aspose Pty Ltd. §17-7 磁粉离合器 §17-8 定向离合器 §17-9 制动器
Copyright 2004-2011 Aspose Pty Ltd. 设计:潘存云
天津工业大学专用
对中环
作者: 潘存云教授
三角形 ——传递中小转矩、牙数为16~60 牙型 梯 形 ——传递较大转矩、牙数为3~15
锯齿形 梯形牙可以补偿磨损后的牙侧间隙。 锯齿形只能单向工作。反转时具有较大的轴向分力,会迫使离合器自行分离。
Profile
5.2.0
Co弹py性ri联gh轴t 2器004-2011 Aspose Pty Ltd.
牙嵌式离合器
摩擦式离合器 离合器 电磁离合器
自动离合器
应用实例:手腕驱动机构、汽车后桥驱动、车辆启停等。
天津工业大学专用
作者: 潘存云教授
联轴器、离合器大都已经标准化了,可直接选用。
工作条件选类型
型式:
普通凸缘联轴器 ——靠铰制孔螺栓对中。 有对中榫的凸缘联轴器 ——靠榫头对中。
绞制孔螺栓
普E通v螺alu栓ation only对. 中榫
eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0 设计:潘存云 Copyright 2004-2011 Aspose Pty Ltd. 设计:潘存云
eat5e˚d≤wαith≤A1s2p˚o,se.xS≤lid0e.s02foDr .NET 3.5 Client Profile 5.2.0
D
y≤0.01CDo,pyrignh≤t 52000004-r2/0m1i1n Aspose Pty Ltd. 设计:潘存云
应用:适用于启动频繁、正反
向运转、有冲击振动、有较大
适用范围:α≤30’, y≤0.04d,v≤300 r/min
天津工业大学专用
作者: 潘存云教授
三、万向联轴器 作用:用于传递两相交轴之间的动力和运动,而且在 传动过程中,两轴之间的夹角还可以改变。共轴、 有夹角
应用:广泛应用于汽车、机床等机械传动系统中。
Evaluation only. eated with Aspose.Slideαs for .NET 3.5 Client Profile 5.2.0
C
设计:潘存云
α1
天津工业大学专用
C
设计:潘存云
2α
作者: 潘存云教授
3. 小型双万向联轴器 结构如图所示,通常采用合金钢制造。
A
Evaluation onlyα. eated with Aspose.Slide设计s:潘存f云or .NET 3.5 Client Profile 设计:潘存云 5.2.0
Copyright 2004-2011 Aspose Pty Ltd.
设计:潘存云
α
天津工业大学专用
作者: 潘存云教授
优点:传递扭矩大、能补偿综合位移。
缺点:结构笨重、造价高。 应用:用于重型传动。
设计:潘存云
Evaluation only. eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0
天津工业大学专用
作者: 潘存云教授
§17-1 联轴器、离合器的类型和应用
作用:主要用于将两根轴联接在一起,使它们一起旋
转,并传递扭矩。
工作特点:联轴器用于刚性静态联接;而离合器则用
于两轴之间的动态联接。
分类:
eate联d 轴wi器th
A刚sp性os联e.轴SlEi器dveasluf固移oart定动i.oN式式nEo联联Tn轴轴l3y..器器5 Client
普通凸缘联轴器
天津工业大学专用
作者: 潘存云教授
制造与安装要求:半联轴器的凸缘端面应与轴线垂直, 安装时应使两轴精确对中。
材料:一般用铸铁、当重载或 V≥30 m/s时,用铸 钢或锻钢 。
特点:结构简单、使用方便、传递扭矩较大,但不能
eate应d用w:ith用缓A于冲sp载减os荷振e.较S。l平Eidve稳asl的ufoa两rti.o轴NnE联oTn接l3y..5。Client Prof9il0e˚ 5.2.0 Copyright 2004-2011 Aspose Pty Ltd.
转矩
转速 确定型号与规格
轴径
T为名义转矩;
计算转矩: Tc=KAETvaluaKtioA为n o工n作ly.情况系数;
eated with Aspos表e.1S7l-i1des工f作or情.N况E系T 数3.5KCA lient Profile 5.2.0 Copy工rig作ht 2机004-2011 Aspose P原ty动L机td为. 电动机时
Evaluation only.
eated with Aspose.Slides for .NET 3.5 Client Pryofile 5.2.0
Copyright
2004-2011
Aspose
Pty Ltd. 设计:潘存云
α
优缺点:结构简单、制造容易。滑块因偏心产生离心 力和磨损,并给轴和轴承带来附加动载荷。
尼龙销 挡板
应用:适用于正反向Ev变a化lua多ti,on启o动nly.
eated with频A繁s的po高se速.S轴lid。es for .NET 3.5 Client Profile 5.2.0
适用范围C:op-y1r2ig˚h≤t t2≤00640-˚2011 Aspose Pty Ltd. 设计:潘存云
Copyright 2004-2011 Aspose Pty Ltd. 设计:潘存云
圆锥孔
预留间隙以补偿 轴向位移。
天津工业大学专用
c
A
预留安装空间以便与更换橡胶套
作者: 潘存云教授
二、弹性柱销联轴器
结构:用尼龙制成的柱销置于两个半联轴器凸缘的孔
中。 结构简单、更换柱销方便。 两种柱销
特点:上述两种联轴器的动力通过弹性 元件传递,缓和冲击、吸收振动。
发电机、小型通风机、小型离心机
1.3
透平压缩机、木工机械、输送机
1.5
搅拌机、增压机、有飞轮的压缩机
1.7
织布机、水泥搅拌机、拖拉机
1.9
挖掘机、起重机、碎石机、造纸机械
2.3
天津工业大学专用
作者: 潘存云教授
§17-2 固定式刚性联轴器
结构:半联轴器通过键与轴相联,用螺栓将两个半联
轴器的凸缘联接在一起。
制造要求:各牙应E精va确lu等ati分on,o以nl使y.载荷均匀分布。 eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0
30˚~40˚ Copyright 2004-2011 Aspose Pty Ltd.
在图示位C置opIy, ri以gh轴t 12为00参4-考2011 Aspose Pty Ltd.