粒子群算法最全的
基本粒子群算法

基本粒子群算法粒子群算法(Particle Swarm Optimization,PSO)是一种群体智能算法。
粒子群算法的灵感来源于模拟一群鸟的行为,这些鸟往往会通过互相沟通,得到更好的食物来源。
类比到优化问题中,粒子群算法的每个个体被称为粒子,它们互相传递信息,从而实现全局最优解的搜索。
在粒子群算法中,每个粒子代表了一个解空间内的可行解。
每个粒子的位置被编码成一组向量,这个向量就是这个粒子的位置,每个粒子还有一个速度向量,决定了它在解空间内的运动方向和速度大小。
在每一次迭代中,每个粒子会对自己的位置和速度进行更新,这依赖于当前的个体最优解,和全局最优解。
个体最优解是这个粒子对解空间的局部搜索结果,全局最优解是所有粒子对解空间的全局搜索结果。
粒子群算法通过不断迭代,更新每个粒子的位置和速度,直到达到收敛条件。
收敛条件可以通过迭代次数,目标函数的阈值等来定义。
在应用上,粒子群算法已被广泛应用于优化问题中,包括函数优化,组合优化,路径规划等等。
它的应用在电力系统,通信网络,机器人,图像处理和数据挖掘等领域也被证明是有效的。
在实际应用中,粒子群算法需要注意一些问题。
一是在选择惯性权重时需要遵守准则,即越接近最优解惯性权重应该越小,越远离最优解惯性权重应该越大。
二是需要确定好种群大小,如果种群太小,可能会导致粒子局限于局部最优解,而丢失全局优解的机会。
三是需要合适的约束条件,保证解空间的可行性,尤其是在优化问题中。
综上所述,粒子群算法是一种十分有用的优化算法,它通过模拟鸟群的行为,实现有效的搜索全局最优解。
但是在实际应用中需要注意一些问题,特别是在惯性权重,种群大小和约束条件的确定上,这样才能达到最好的优化效果。
粒子群算法粒子维度
粒子群算法粒子维度粒子群优化算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,源自对鸟群行为的模拟。
它通过模拟鸟群在食物等目标时的行为,利用群体协作和信息交流来优化问题的解。
在粒子群算法中,解空间被表示为多维空间,每个解被称为一个粒子,粒子的位置表示解在各个维度上的取值。
每个粒子都有自己的位置和速度,通过更新速度和位置来更优的解。
粒子的移动策略是受到个体历史最优位置和全局最优位置的影响,个体历史最优位置是粒子自身的最优解,全局最优位置是整个群体中历史最优解。
粒子群算法的基本过程如下:(1)初始化群体的位置和速度;(2)根据适应度函数评估每个粒子的适应度;(3)更新每个粒子的速度和位置;(4)更新个体历史最优位置和全局最优位置;(5)重复步骤(2)到(4),直到达到指定的迭代次数或满足停止条件。
更新速度和位置的过程可以通过以下公式实现:速度更新公式:V[i] = w * V[i] + c1 * rand( * (P_best[i] -X[i]) + c2 * rand( * (G_best[i] - X[i])位置更新公式:X[i]=X[i]+V[i]其中,V[i]表示粒子i的速度,X[i]表示粒子i的位置,w是惯性权重,P_best[i]是粒子i的个体历史最优位置,G_best[i]是粒子i周围邻域中最优的全局最优位置,c1和c2是学习因子,rand(是一个随机数。
(1)全局能力强:通过群体的协作和信息交流,可以在解空间中进行全局,避免陷入局部最优解;(2)收敛速度快:通过粒子的速度更新,可以有效地引导过程,加快算法的收敛速度;(3)不依赖问题的具体形式:粒子群算法不需要对问题进行求导或者建立模型,适用于不同类型的问题。
然而,粒子群算法也存在一些不足之处:(1)对参数设置敏感:学习因子和惯性权重的选择对算法的性能有重要影响,需要进行合理的参数设置;(2)易陷入局部最优解:粒子群算法在过程中容易陷入局部最优解,特别是在解空间比较复杂的问题中,需要采取一些措施来增强其全局能力。
粒子群算法
粒子群算法原理及简单案例[ python ]介绍粒子群算法(Particle swarm optimization,PSO)是模拟群体智能所建立起来的一种优化算法,主要用于解决最优化问题(optimization problems)。
1995年由 Eberhart和Kennedy 提出,是基于对鸟群觅食行为的研究和模拟而来的。
假设一群鸟在觅食,在觅食范围内,只在一个地方有食物,所有鸟儿都看不到食物(即不知道食物的具体位置。
当然不知道了,知道了就不用觅食了),但是能闻到食物的味道(即能知道食物距离自己是远是近。
鸟的嗅觉是很灵敏的)。
假设鸟与鸟之间能共享信息(即互相知道每个鸟离食物多远。
这个是人工假定,实际上鸟们肯定不会也不愿意),那么最好的策略就是结合自己离食物最近的位置和鸟群中其他鸟距离食物最近的位置这2个因素综合考虑找到最好的搜索位置。
粒子群算法与《遗传算法》等进化算法有很多相似之处。
也需要初始化种群,计算适应度值,通过进化进行迭代等。
但是与遗传算法不同,它没有交叉,变异等进化操作。
与遗传算法比较,PSO的优势在于很容易编码,需要调整的参数也很少。
一、基本概念与遗传算法类似,PSO也有几个核心概念。
粒子(particle):一只鸟。
类似于遗传算法中的个体。
1.种群(population):一群鸟。
类似于遗传算法中的种群。
2.位置(position):一个粒子(鸟)当前所在的位置。
3.经验(best):一个粒子(鸟)自身曾经离食物最近的位置。
4.速度(velocity ):一个粒子(鸟)飞行的速度。
5.适应度(fitness):一个粒子(鸟)距离食物的远近。
与遗传算法中的适应度类似。
二、粒子群算法的过程可以看出,粒子群算法的过程比遗传算法还要简单。
1)根据问题需要,随机生成粒子,粒子的数量可自行控制。
2)将粒子组成一个种群。
这前2个过程一般合并在一起。
3)计算粒子适应度值。
4)更新种群中每个粒子的位置和速度。
粒子群算法详解

粒子群算法详解粒子群算法(Particle Swarm Optimization,PSO)是一种模拟鸟群觅食行为的优化算法,通过模拟个体之间的协作和信息共享来寻找最优解。
它是一种全局优化算法,可以应用于各种问题的求解。
粒子群算法的基本思想是通过模拟鸟群的行为来寻找最优解。
在算法中,将待优化问题看作一个多维空间中的搜索问题,将问题的解看作空间中的一个点。
每个解被称为一个粒子,粒子的位置代表当前解的状态,速度代表解的更新方向和速度。
粒子之间通过互相交流信息,以共同寻找最优解。
在粒子群算法中,每个粒子都有自己的位置和速度。
每个粒子根据自身的经验和邻域中最优解的经验来更新自己的速度和位置。
速度的更新由三个因素决定:当前速度、个体最优解和全局最优解。
粒子根据这些因素调整速度和位置,以期望找到更优的解。
通过不断迭代更新,粒子群逐渐收敛于最优解。
粒子群算法的核心是更新速度和位置。
速度的更新公式如下:v(t+1) = w * v(t) + c1 * rand() * (pbest - x(t)) + c2 * rand() * (gbest - x(t))其中,v(t+1)为下一时刻的速度,v(t)为当前速度,w为惯性权重,c1和c2为学习因子,rand()为[0,1]之间的随机数,pbest为个体最优解,gbest为全局最优解,x(t)为当前位置。
位置的更新公式如下:x(t+1) = x(t) + v(t+1)通过调整学习因子和惯性权重,可以影响粒子的搜索能力和收敛速度。
较大的学习因子和较小的惯性权重可以增强粒子的探索能力,但可能导致算法陷入局部最优解;较小的学习因子和较大的惯性权重可以加快算法的收敛速度,但可能导致算法过早收敛。
粒子群算法的优点是简单易实现,收敛速度较快,对于大多数问题都能得到较好的结果。
然而,粒子群算法也存在一些缺点。
首先,算法对于问题的初始解和参数设置较为敏感,不同的初始解和参数可能导致不同的结果。
粒子群算法
智能优化计算
1 粒子群算法的基本原理
1.1 粒子群算法的提出 ➢ 五年后,在国际上逐步被接受,并有大批不同 领域的学者投入该算法相关研究,目前已经成 为智能优化领域研究的热门
➢ 2003年,《控制与决策》第二期刊登国内第一篇 PSO论文——综述文章
8
历年发表论文的数目
2500
2328
2000
1500
xikd
)
c2 ra n d( ) ( p gbest
xikd )
xk 1 id
xikd
vk 1 id
i 1,2,, m; d 1,2,, D
惯性权重(续)
通过调节w值,可以控制PSO的全局探索和局部开发能力:
• w≥1:微粒速度随迭代次数的增加而增加,微粒发散。
• 0<w<1 :微粒减速,算法的收敛性依靠惯性权重c1和 c2 。
共性
(1)都属于仿生算法; (2)都属于全局优化方法; (3)都属于随机搜索算法; (4)都隐含并行性; (5)根据个体的适配信息进行搜索,因此不受函 数约束条件的限制,如连续性、可导性等; (6)对高维复杂问题,往往会遇到早熟收敛和收 敛性能差的缺点,都无法保证收敛到最优点。
PSO就是对鸟群或鱼群寻找食物这种群体行为的模拟。
单个鸟 整个鸟群
单个微粒
由多个微粒组 成的微粒群
一个微粒代表问题 的一个解
每个微粒都有一个 由被优化函数值决 定的适应值
鸟群寻找食 物的飞行策 略
鸟群行为
微粒位置和速 度的更新策略
PSO
13
每个微粒通过跟踪 自身找到的最好位 置以及邻域内其它 微粒找到的最好位 置,完成对整个搜 索空间的搜索
最大化问题
粒子群算法的参数及选择

粒子群算法的参数及选择粒子群算法,听上去是不是有点高深莫测?其实这玩意儿就像我们生活中的寻宝游戏,参与者在一片“宝藏”中飞来飞去,试图找到最闪亮的那颗。
说到这里,可能有人会问:这个算法里到底有哪些参数呀?咱们今天就来聊聊这些参数,以及怎么选择它们,让大家在“寻宝”过程中不至于迷了路。
我们得了解粒子群算法的基本组成部分。
想象一下,算法里的每一个粒子就像一个小小的探险家,它们在一个多维空间里飞来飞去,试图找到最好的解决方案。
这个时候,粒子的“速度”和“位置”就显得特别重要。
速度决定了粒子在空间中的移动速度,而位置则是它目前在“寻宝”中的位置。
想要找到最优解,得调整这两个参数,听上去是不是像在开车?控制好油门和方向,才能不至于迷失在路上。
咱们再说说“个体学习因子”和“社会学习因子”。
这个俩家伙就是粒子群的灵魂。
个体学习因子就像你身边那个爱分享经验的朋友,他总是愿意告诉你自己找宝藏的心得;而社会学习因子则是大家一起讨论的氛围,越热烈,越能激发每个人的灵感。
选择这两个因子的时候,得根据具体情况来定。
团队合作显得特别重要;个人独立思考又不能少。
可以说,这就是个“平衡”的艺术了。
再聊聊“惯性权重”。
哎呀,这个词听起来有点拗口,其实说白了就是粒子在前进过程中对自己前进方向的依赖程度。
如果惯性权重设置得高,粒子就像开着车的老司机,能保持原有的方向;如果设置得低,那就像新手司机,左右摇摆不定,容易迷路。
所以,设置这个参数的时候,得谨慎点,不能一味追求速度,要有稳定性才行。
说完这些参数,咱们得讨论一下怎么选择它们了。
就像打麻将,手里有一副好牌,但怎么玩才是关键。
得考虑问题的复杂程度。
有些问题就像是小儿科,简单明了;而有些问题则复杂得像天上的星星,让人眼花缭乱。
根据问题的复杂程度来选择参数,才能事半功倍。
数据的性质也得考虑。
有些数据分布得很均匀,有些则像一团乱麻。
这时候,参数的选择得灵活变通,适应不同的数据特点。
就像做饭一样,材料不同,调料的配比也得随之调整。
粒子群算法粒子群算法简介
粒子群算法(1)----粒子群算法简介二、粒子群算法的具体表述上面罗嗦了半天,那些都是科研工作者写论文的语气,不过,PSO的历史就像上面说的那样。
下面通俗的解释PSO算法。
PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。
大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。
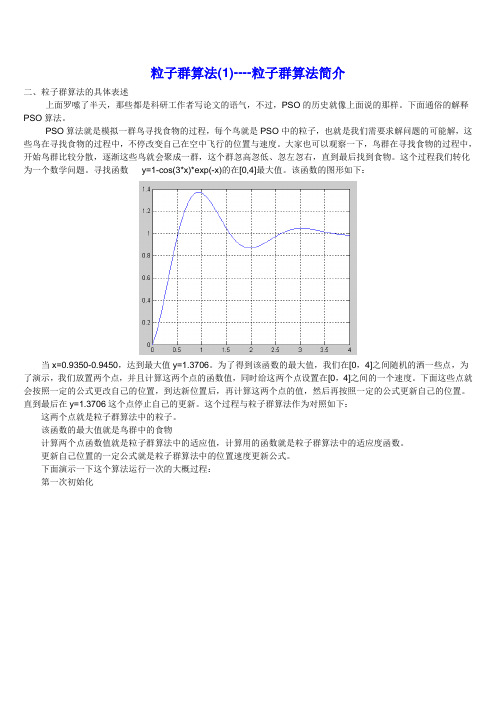
这个过程我们转化为一个数学问题。
寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。
该函数的图形如下:当x=0.9350-0.9450,达到最大值y=1.3706。
为了得到该函数的最大值,我们在[0,4]之间随机的洒一些点,为了演示,我们放置两个点,并且计算这两个点的函数值,同时给这两个点设置在[0,4]之间的一个速度。
下面这些点就会按照一定的公式更改自己的位置,到达新位置后,再计算这两个点的值,然后再按照一定的公式更新自己的位置。
直到最后在y=1.3706这个点停止自己的更新。
这个过程与粒子群算法作为对照如下:这两个点就是粒子群算法中的粒子。
该函数的最大值就是鸟群中的食物计算两个点函数值就是粒子群算法中的适应值,计算用的函数就是粒子群算法中的适应度函数。
更新自己位置的一定公式就是粒子群算法中的位置速度更新公式。
下面演示一下这个算法运行一次的大概过程:第一次初始化第一次更新位置第二次更新位置第21次更新最后的结果(30次迭代)最后所有的点都集中在最大值的地方。
粒子群算法(2)----标准的粒子群算法在上一节的叙述中,唯一没有给大家介绍的就是函数的这些随机的点(粒子)是如何运动的,只是说按照一定的公式更新。
这个公式就是粒子群算法中的位置速度更新公式。
下面就介绍这个公式是什么。
在上一节中我们求取函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。
粒子群优化算法课件

实验结果对比分析
准确率
01
在多个数据集上,粒子群优化算法的准确率均高于对比算法,
表明其具有较强的全局搜索能力。
收敛速度
02
粒子群优化算法在多数数据集上的收敛速度较快,能够更快地
找到最优解。
鲁棒性
03
在不同参数设置和噪声干扰下,粒子群优化算法的性能表现稳
定,显示出良好的鲁棒性。
结果讨论与改进建议
讨论
其中,V(t+1)表示第t+1次迭代 时粒子的速度,V(t)表示第t次迭 代时粒子的速度,Pbest表示粒 子自身的最优解,Gbest表示全 局最优解,X(t)表示第t次迭代时
粒子的位置,w、c1、c2、 rand()为参数。
算法优缺点分析
优点
简单易实现、参数少、收敛速度快、 能够处理多峰问题等。
03
强化算法的可视化和解释性
发展可视化工具和解释性方法,帮助用户更好地理解粒子群优化算法的
工作原理和结果。
THANKS
感谢观看
粒子群优化算法的改进与扩展
动态调整惯性权重
惯性权重是粒子群优化算法中的一个 重要参数,它决定了粒子的飞行速度 。通过动态调整惯性权重,可以在不 同的搜索阶段采用不同的权重值,从 而更好地平衡全局搜索和局部搜索。
VS
一种常见的动态调整惯性权重的方法 是根据算法的迭代次数或适应度值的 变化来调整权重值。例如,在算法的 初期,为了更好地进行全局搜索,可 以将惯性权重设置得较大;而在算法 的后期,为了更好地进行局部搜索, 可以将惯性权重设置得较小。
并行粒子群优化算法
并行计算技术可以提高粒子群优化算法的计算效率和收敛 速度。通过将粒子群分成多个子群,并在不同的处理器上 同时运行这些子群,可以加快算法的收敛速度。