otc机器人点检项目表
OTC机器人维护保养标准

O T C机器人维护保养标
准
标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
OTC机器人维护保养标准
定期的维护与检查是机器人正常运转所必需的,同时也能确保作业时设备与人员的安全。
检查时间为控制柜处于闭合状态下的时间。
1、日常检查
a)闭合电源前需要检查的项目
b)闭合电源后需要检查的项目
注意:确认无其他人员处于机器人工作范围内后才可闭合电源
2、定期检查
3、更换编码器电池
备份。
参数丢失。
更换前请切断机器人电源。
更换电池的顺序
(1) 检查电池的使用时间, 当超过 2
换新电池。
(2) 将图 2 中“A”所示的护盖(3 个护盖)卸
下。
拔下旧电池,插好新电池(事先将电
池固定用尼龙卡子卸下)。
或者当机器人显示“检查锂电池”信息示
再进行更换。
(3) 更换或检查电池结束后,将电缆插好,并
固定好尼龙卡子,最后上好 A 处护盖。
注意
请将-(负)极的橡胶护套更换到新电池上。
具体细节请与供应商联系。
电池的实际使用寿命有可能缩短。
连续使用(长时间闭合控制柜电源)可减少电池寿命。
焊机及附件、夹具部分
特别注意事项
1)机器人部分
2)电焊机及附件
3)焊材和保护气。
安川机器人之机器人点检保养项目表.pdf
4)在连接街头处是否有松
动
机器人支架固定螺栓 是否有松动
电缆接头
是否有松动
机器人马达抱闸
马达抱闸的动作
固定螺丝是否有松动
减速机 (轴 J1, J2, J3) 减速机 (轴 J4, J5, J6)
同步齿形带 (AXIS J5, J6)
深圳稻草人自动化培训
联为智能教育
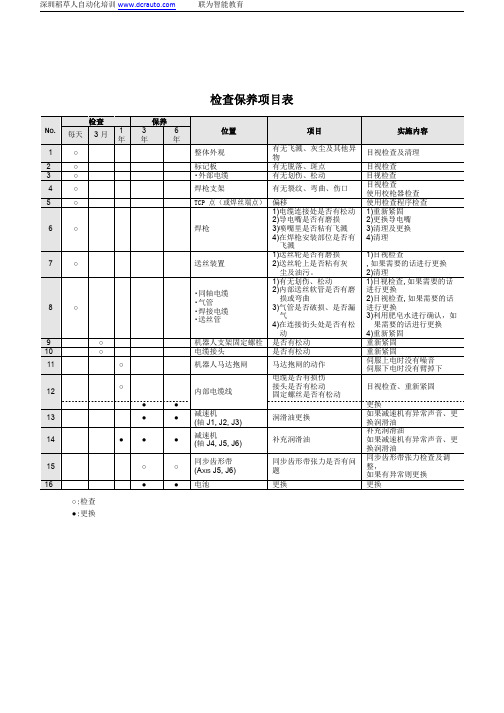
检查保养项目表
检查
NO.
每天
3月
1 年
1
○
2
○
3
○
4
○
5
○
6
○
7
○
8
○
9
○
10
○
11
○
12
○
13
14
●
15
16 ○:检查 ●:更换
保养
3
6
年
年
●
●
●
●
●
●
○
○
●
●
位置
项目
实施内容
整体外观
标记板 ・外部电缆
有无飞溅、灰尘及其他异 物 有无脱落、斑点 有无划伤、松动
焊枪支架
有无裂纹、弯曲、伤口
TCP 点(或焊丝端点) 偏移
1)电缆连接处是否有松动
2)导电嘴是否有磨损
焊枪
3)喷嘴里是否粘有飞溅
4)在焊枪安装部位是否有
飞溅
1)送丝轮是否有磨损
送丝装置
2)送丝轮上是否粘有灰
尘及油污。
1)有无划伤、松动
・同轴电缆 ・气管 ・焊接电缆 ・送丝管
2)内部送丝软管是否有磨 损或弯曲
果需要的话进行更换 4)重新紧固 重新紧固 重新紧固 伺服上电时没有噪音 伺服下电时没有臂掉下
工业机器人设备本质安全检查表
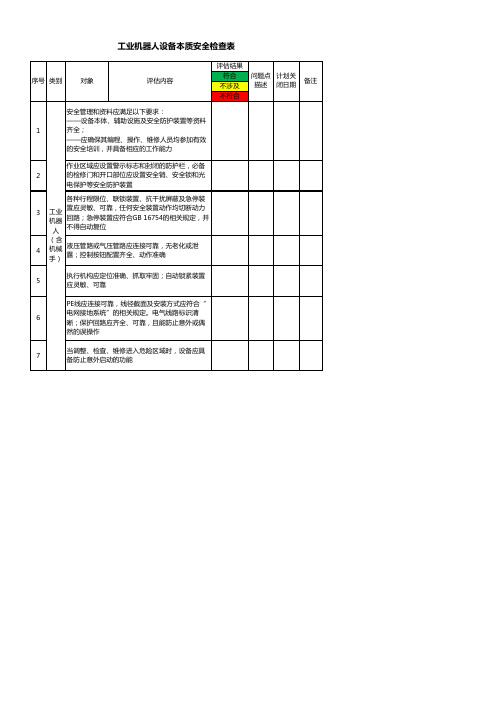
序号 类别
对象
评估内容
评估结果 符合 不涉及 不符合
问题点 计划关 描述 闭日期
备注
安全管理护装置等资料
1
齐全;
——应确保其编程、操作、维修人员均参加有效
的安全培训,并具备相应的工作能力
作业区域应设置警示标志和封闭的防护栏,必备
2
的检修门和开口部位应设置安全销、安全锁和光
电保护等安全防护装置
各种行程限位、联锁装置、抗干扰屏蔽及急停装
3
工业 置应灵敏、可靠,任何安全装置动作均切断动力 机器 回路;急停装置应符合GB 16754的相关规定,并
人 不得自动复位
(含
4
机械 液压管路或气压管路应连接可靠,无老化或泄 手) 露;控制按钮配置齐全、动作准确
5
执行机构应定位准确、抓取牢固;自动锁紧装置 应灵敏、可靠
PE线应连接可靠,线径截面及安装方式应符合“
6
电网接地系统”的相关规定。电气线路标识清 晰;保护回路应齐全、可靠,且能防止意外或偶
然的误操作
当调整、检查、维修进入危险区域时,设备应具
7
备防止意外启动的功能
OTC机器人操作规程(2024)

2024/1/30
23
常见问题类型及原因分析
信号干扰
确保机器人与控制器之间的通信信号没有受到干扰。
通信模块故障
检查通信模块是否正常工作,如有需要请更换。
2024/1/30
24
故障排除方法与步骤
01
机器人无法启动
2024/1/30
02
1. 检查电源插头和电源线,确保连接良好且无损坏。
2. 尝试更换电池或使用充电器为电池充电。
34
06
维护保养与定期检查计划
2024/1/30
35
日常维护保养项目清单
清洁机器人表面
使用干布擦拭机器人外壳及显示屏,确保无 灰尘、油污等杂质。
润滑关节部位
对机器人的关节部位进行定期润滑,以确保 运动顺畅。
2024/1/30
检查电缆连接
确认所有电缆连接牢固,无松动或破损现象 。
更新软件版本
定期检查并更新机器人控制软件,以获取最 新功能和性能优化。
示教过程
02 使用示教器或相关设备对机器人进行手动 操作。
03
记录机器人运动轨迹和动作顺序,生成示 教文件。
04
将示教文件导入机器人控制系统,进行自 动运行测试。
17
自动运行监控与调整方法
自动运行监控
实时监控机器人运行状态,包括位置、速度、加 速度等参数。
监测机器人工作区域内的人员和障碍物情况,确 保安全。
检查安全装置(如急 停按钮、安全护栏等 )是否完好有效。
2024/1/30
检查各关节、连接处 是否紧固,无松动或 脱落现象。
8
确认工作环境符合要求
确认机器人工作区域内无杂物、 障碍物或人员,确保工作空间安
机器人点检保养日常安全检查
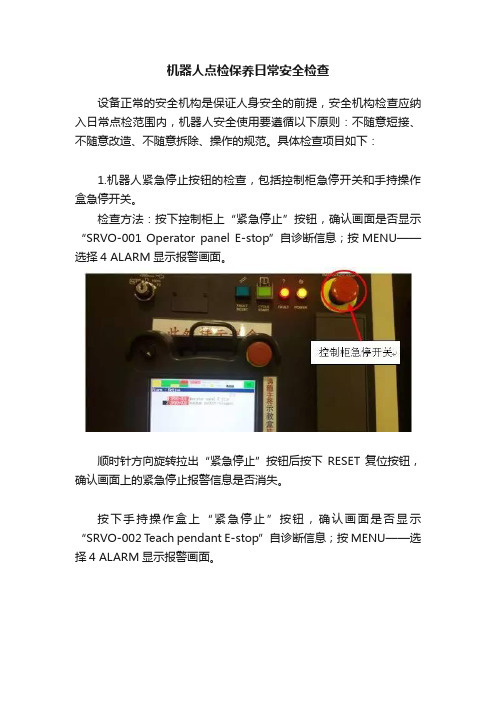
机器人点检保养日常安全检查设备正常的安全机构是保证人身安全的前提,安全机构检查应纳入日常点检范围内,机器人安全使用要遵循以下原则:不随意短接、不随意改造、不随意拆除、操作的规范。
具体检查项目如下:1.机器人紧急停止按钮的检查,包括控制柜急停开关和手持操作盒急停开关。
检查方法:按下控制柜上“紧急停止”按钮,确认画面是否显示“SRVO-001 Operator panel E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
按下手持操作盒上“紧急停止”按钮,确认画面是否显示“SRVO-002 Teach pendant E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
2.安全门及门开关的检查。
检查方法:机器人处于停止状态、控制柜模式开关处于AUTO位置、机器人没有显示任何报警信息。
拉开安全门,确认画面是否显示“SRVO-004 Fence open”自诊断信息;按MENU——选择4 ALARM显示报警画面。
关上安全门后按下系统复位按钮,确认画面上的门开关报警信息是否消失。
3.外部紧急停止开关的检查。
检查方法:机器人处于停止状态下、机器人没有显示任何报警信息,按下外部急停按钮;确认画面是否显示“SRVO-007 External E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
备注:R-30IB系列控制器安全信号全为双链规格,R-3IB MATE、R-30IA MATE、R-30IB、R-30IB MATE控制柜的安全门和外部急停信号连接于机器人控制器内E-stop板上,R-J3IB和R-30IA(R-J3IC)控制柜的安全门和外部急停信号连接于机器人控制内PANEL BOARD (配电盘)上。
OTC机器人操作规程

OTC操作规程OTC操作规程1. 引言在使用OTC前,请仔细阅读本操作规程,并严格按照规程进行操作。
为了确保您的安全和的正常运行,本文档详细介绍了OTC的操作步骤和注意事项。
2. OTC概述2.1 OTC是一种用于在店铺、酒店、办公室等场所提供服务的自动化。
它能根据预设的程序和指令执行工作,如接待客户、送餐、清扫等。
2.2 OTC由硬件和软件组成。
硬件包括机身、传感器和执行器等部件,软件运行在的控制系统中。
3. OTC操作步骤3.1 开机与关机3.1.1 开机:将电源开关切换到ON位置,并等待系统启动完成。
3.1.2 关机:将电源开关切换到OFF位置,并确保完全停止运行后断电。
3.2 控制与导航3.2.1 使用遥控器:按下遥控器上的相应按钮控制的移动、停止等动作。
3.2.2 使用语音指令:在“听到”的情况下,通过语音指令控制的移动、停止等动作。
4. OTC安全注意事项4.1 安全操作4.1.1 保持周围的工作环境整洁,避免障碍物阻碍的运动。
4.1.2 使用遥控器时,确保与人员、设备以及其他保持安全距离。
4.1.3 禁止在运动时触摸或拆卸的任何部件。
4.2 电源管理4.2.1 定期检查电源线路和插头,确保其完好无损。
4.2.2 禁止将湿手插入电源插座或连接线路。
5. OTC维护与保养5.1 日常保养5.1.1 定期检查的传感器和执行器等部件,如发现故障或异常,及时通知维护人员。
5.1.2 清洁的外观,确保其整洁、无尘等。
5.2 维修与维护5.2.1 的维修和维护应由授权维修人员进行,禁止非专业人员进行操作。
附件:附件1:OTC操作指南附件2:OTC维护记录表法律名词及注释:1. OTC:OTC是Over-The-Counter的缩写,指场外交易。
OTC 是指在店铺、酒店、办公室等场所提供服务的自动化。
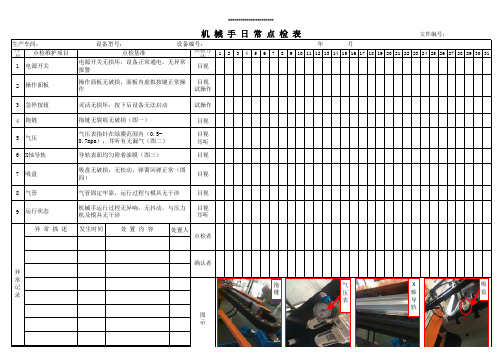
机械手点检表
序号点检方
法
12345678910111213141516171819202122232425262728293031
1目视
2
目视试操作
3试操作4目视
5目视耳听
6目视
9
目视
耳听
处置人
气管
吸盘
吸盘无破损,无松动,弹簧回弹正常(图
四)
气管固定牢靠,运行过程与模具无干涉
7 8
异常记录
目视
目视
点检者
确认者
图
示
运行状态
机械手运行过程无异响,无抖动,与压力
机及模具无干涉
异 常 描 述发生时间处 置 内 容
拖链拖链无裂痕无破损(图一)
气压
气压表指针在绿膜范围内(0.5-
0.7mpa);耳听有无漏气(图二)
X轴导轨导轨表面均匀附着油膜(图三)
电源开关
电源开关无损坏,设备正常通电,无异常
报警
操作面板
操作面板无破损,面板内虚拟按键正常操
作
急停按钮灵活无损坏,按下后设备无法启动
**********************
机械手 日 常 点 检表
生产车间: 设备型号: 设备编号: 年 月点检维护项目点检基准
拖链气
压
表
X
轴
导
轨
吸
盘
文件编号:
编制审核图一图二图三图四
批准
说明:“√”完好“Δ”异常,“×”待修“о”修好;。
2024版OTC机器人焊接系统操作说明

OTC机器人焊接系统操作说明目录•系统概述与功能介绍•设备安装与调试•操作界面与基本操作•焊接工艺参数设置与优化•设备维护与保养•安全操作规程及注意事项•总结与展望PART01系统概述与功能介绍机器人本体焊接设备传感器系统控制系统OTC 机器人焊接系统组成01020304包括机器人臂、控制器、驱动器等部分,实现焊接过程中的各种动作。
包括焊接电源、焊枪、送丝机构等,用于提供焊接所需的能量和材料。
包括位置传感器、速度传感器、温度传感器等,用于实时监测焊接过程的状态和参数。
包括PLC 、触摸屏等控制设备,实现对整个焊接系统的集中控制和操作。
主要功能及特点可实现全自动或半自动的焊接过程,提高生产效率和产品质量。
采用先进的控制算法和传感器技术,确保焊接位置的准确性和稳定性。
可根据不同的工件和焊接要求,调整焊接参数和工艺,满足多样化的生产需求。
提供直观的操作界面和人性化的操作流程,降低操作难度和劳动强度。
自动化程度高焊接精度高适应性强操作简便适用范围和应用领域适用范围适用于各种金属材料的焊接,如钢、铝、铜等,可广泛应用于汽车制造、航空航天、船舶制造等领域。
应用领域可应用于车身焊接、框架焊接、管道焊接等多种应用场景,提高生产效率和产品质量。
PART02设备安装与调试确认设备清单检查设备外观准备安装工具确定安装位置设备安装前准备工作核对设备及其附件清单,确保所有部件齐全。
准备好所需的安装工具,如螺丝刀、扳手、水平仪等。
检查设备外观是否完好,无明显变形、损坏或锈蚀。
选择平整、开阔的安装场地,确保设备周围有足够的空间进行操作和维护。
安全防护安装好安全防护装置,如安全光栅、急停按钮等,确保操作安全。
接通电源,检查设备是否正常运行,有无异常声响或振动。
连接电缆将控制电缆、动力电缆等按照图纸要求连接好,确保连接牢固、无松动。
安装基座按照图纸要求安装基座,确保基座水平、稳固。
安装机器人本体将机器人本体安装在基座上,注意轻拿轻放,避免碰撞。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FAX:021-5882-8846 地址:中国上海市浦东新区浦东大道
138号永华大厦17楼B,C,D室 邮编:200120
焊接机点检项目表
项 目
日常
3月
1○◎
2○◎
3○◎
1年
点检保养部位
金属插座、接头 电缆 端子台、接地线
4
◎ ※ 电源线
5
◎ ※ 冷却风扇
6
※
控制装置内部 PCB、CRAD固定
7
※ 内部排线电缆接头
继电器电磁开关
8
※
(控制装置、焊接 电源、INTERFACE)
项目
检查松紧 接头检查松紧 检查端子台及接地线的松紧 一次二次电源线端子检查松 紧及线路 油污、灰尘、运转
点检保养 处理内容 锁紧螺丝 锁紧螺丝 再锁紧
锁紧螺丝、更换线路
清扫、检测、更换
检查松紧
确实固定、检测
检查松紧
确实固定、检测
接点状态
目视检点、检测、 更换
9
※
控制装置内部排线 电缆接头
检查松紧、线路检测
确实固定、清扫、检 测、异常更换部品
○符号表示使用者日常担当保养﹑点检作业事项。 ◎符号表示使用者三个月担当保养﹑点检作业事项。 ※符号表示年度保养﹑点检作业事项需由代理商专业人员点检﹑调整﹑保养。
P3/3