机械原理课件--平衡
《机械原理》课件机械的平衡
= 5.6kg
q bI = 6°
m bII
=
m
wW
II b
/ rbII
= 7.4kg
q bII = 145°
§63 刚性转子的平衡实验
一 静平衡实验
一 静平衡实验续
二 动平衡实验 动平衡机的工作原理示意图
§64 转子的许用不平衡量
转子要完全平衡是不可能的;实际上;也不需要过高要求 转子的平衡精度;而应以满足实际工作要求为度 为此;对不 同工作要求的转子规定了不同的许用不平衡量;即转子残余 不平衡量 许用不平衡量有两种表示方法: 1 用质径积mr单位g mm表示
2 用偏心距e 单位μm表示
e = mr/m
例:如图69所示;为一个一般机械的转子;质量为 70kg;转速n=3000r/min;两平衡基面Ⅰ Ⅱ至质心的距离 分别为a=40cm;b=60cm;试确定两平衡基面内的许用不平 衡量
解:因现在要平衡的是一个一般机械的转子;借助表61中典型转 子举例一栏的说明;可知应选用平衡等级G6 3;其平衡精度A=6 3mm/s 今转子角速度ω=πn/30≈0 1n=300rad/s;可求得许用偏心 距为
二 机械平衡的内容
1 绕固定轴回转的构件惯性力的平衡 1刚性转子的平衡 1静平衡:只要求惯性力达到平衡; 2动平衡:要求惯性力和惯性力矩都达到平衡 2挠性转子的平衡:转子在工作过程中会产生较大的弯曲 变形;从而使其惯性力显著增大 2 机构的平衡:对整个机构加以研究;设法使各运动构件 惯性力的合力和合力偶达到完全地或部分的平衡
2对于动不平衡的刚性转子;不论它有多少个偏心质量; 以及分布在多少个回转平面内;都只需在选定的两个平 衡基面内增加或除去一个适当的平衡质量;就可以使转 子获得动平衡双面平衡 3动平衡同时满足静平衡的条件经过动平衡的转子一 定静平衡;反之;经过静平衡的转子不一定动平衡
机械原理课件机械的平衡
(二、动平衡 )
汽轮机转子的动平衡实验
回答本节开始提出的问题
汽车车轮动平衡 车轮对维持行驶稳定性和保证乘
坐舒适性起着关键的作用。理想状 态下车轮是质量分布均匀,外形保 持规则的圆形。但是,部件在制造 过程中无法达到绝对的高精度,不 可避免地会产生误差,其结果是造 成车轮旋转质量不平衡。
y m2B= m2- m2Ay=80-40=40g ;
m3A=m3b3/L=70
50/300=11.67g;
y
y
பைடு நூலகம்
F2
m2A
x 3r2 2
r3 r1
m1A
r2 r1z m1 F1
m2m2 3B=r3m3 3y-xmm3Ar3r3B=327rm10m-22B111B.67x=58.33g;
x Fm3 3
第二节 刚性转子的平衡原理
(二、动平衡 )
将m向A、B两平衡面分解
y B
m
A
r
x
b a
L
第二节 刚性转子的平衡原理
(二、动平衡 )
若 mA、mB与F m等效有: FB
y
mA+mFBA= m;
mA
amA=bmmBB
m
r
r
r
x
B
A
b mA = mb/L
a
L
mB = am/L
第二节 刚性转子的平衡原理
一、刚性转子的静平衡
第二节 刚性转子的平衡原理
y
(一、静平衡 )
m2 r2
o
x
D
r1 m1
rn
mn
第二节 刚性转子的平衡原理
n个分布在同一平面中 的质量m1,m2,….mn。
机械原理课件--第13章-机械的平衡
大型电机转子的动平衡试验
应用案例:
小型电机转子的动平衡试验
由于实验设备本身精度的影响,经过实验平衡的转子,实际上不可避免还存在一些残余的不平衡量。要想进一步减小其不平衡量,就得使用更精密的平衡装置和更高的平衡技术。但这意味着要提高生产成本,从合理降低生产成本而言,在满足使用要求的前提下,使用的平衡设备越简单越好。因此,根据工作要求,对转子规定一个适用的许用不平衡量是完全有必要的。
约掉公因式
很显然,回转件平衡后:
e=0
回转件质量对轴线产生的静力矩:
mge = 0
静平衡或单面平衡
该回转件在任意位置将保持静止:
从理论上讲,对于偏心质量分布在多个运动平面内的转子,对每一个运动按静平衡的方法来处理(加减质量),也是可以达到平衡的。问题是由于实际结构不允许在偏心质量所在平面内安装平衡配重,也不允许去掉不平衡重量(如凸轮轴、曲轴、电机转子等)。解决问题的唯一办法就是将平衡配重分配到另外两个平面I、II内。
一、质量分布在同一回转面内(静平衡)
平衡原理:在重心另一侧加上一定的质量,或在重心同侧去掉一些质量,使质心位置落在回转轴线上,使离心惯性力达到平衡。
适用范围:轴向尺寸较小的盘形转子(B/D<0.2),如风扇叶轮、飞轮、砂轮等回转件,
12-2 刚性转子的平衡设计
如果该力系不平衡,那么合力:
增加一个重物 Gb 后,可使新的力系之合力:
任意空间力系的平衡条件为:
首先在转子上选定两个回转平面Ⅰ和Ⅱ作为转面内的离心惯性力往平面Ⅰ和Ⅱ上分解。
动平衡的计算方法:
直接引用前述结论得:
动平衡的计算方法:
离心惯性力分解结果:
不平衡质量分解结果
作图法求解
机械原理——机械的平衡
21
机械原理
§6-3 刚性转子的平衡试验 理论上的平衡转子,由于制造精度、装配、材质不均匀 等原因,会产生新的不平衡。只能借助于实验平衡。 平衡实验是用实验的方法来确定出转子的不平衡量的大 小和方位,利用增加或除去平衡质量的方法予以平衡。
一.静平衡实验
1.实验原理
22
机械原理
2.实验设备
滚轮式静平衡仪
9
机械原理
10
机械原理
例:如图,盘状转子偏心质量m1、m2, 回转半径r1、r2,如何实现静平衡?
解: F F F 0 Ii b
ω
2 2 2 m1 r 1 m r 22 r 2m b r b0 r b 0 b m 2m
26
机械原理
3.现场平衡
对于一些尺寸非常大或转速很高的转子,一般无法在专用动 平衡机上进行平衡。即使可以平衡,但由于装运、蠕变和工作温 度过高或电磁场的影响等原因,仍会发生微小变形而造成不平衡。 在这种情况下,一般可进行现场平衡。 现场平衡 就是通过直接测量机器中转子支架的振动,来确 定其不平衡量的大小及方位,进而确定应增加或减去的平衡质量 的大小及方位,使转子得以平衡。
G4000
G1600
G630
1600
630
……
G2.5 G1 G0.4
……
2.5 1 0.4
……………………………..
燃气轮机和汽轮机、透平压缩机、机床传动装置、 特殊中、大型电机转子、小型电机转子等。 磁带录音机传动装置、磨床传动装置、特殊要求 的小型电机转子。 精密磨床的主轴、砂轮盘及电机转子陀螺仪。
32
机械原理
1.利用配重 2
1 4
s
机械原理 第六章 机械的平衡

二. 刚性转子的动平衡计算(Dynamic balance)
1. 动不平衡
——在转子运动的情况下才能显示出来的不平衡现象。
对于 b/D>0.2 的转子,其质量不能
再视为分布在同一平面内,即使质 心在回转轴线上,由于各惯性力不 在同一回转平面内,所形成惯性力 偶仍使转子处于不平衡状态。
m1 m2
工程中符合这种条件的构件有:多缸平衡 加装平衡配重,可以平衡 由 m B 所产生的离心惯性力和滑 块的一部分往复移动惯性力。
总
结
基本要求:掌握刚性转子的静平衡、动平衡的原理和方法;了 解平面四杆机构的平衡原理。 重 难 点:掌握刚性转子的静平衡、动平衡的原理和方法。 点:刚性转子动平衡概念的建立。
分别按每个平衡基面建立质径积的平衡方程式,用图解法求 解出两平衡基面的平衡质量的大小及方位。
II
F2
F2II
m2 r2
I
F1II
r3 m3 F3
F2I
r1
F1I
F3II l3 l2
m1
F1
F3I l1 L
m3 I r3 I mbI rbI
m3 II r3 II
m2 I r2 I m1 I r1 I
2)利用平衡质量平衡 S’1 m1 图示机构中,构件2的质量m2可以 A 1 用两个集中在B和C两点的两个质 量替换:
m'
添加平衡质量m’、m”之 后,使机构的质量中心落在AD 连线上固定点S处。使机构达到 平衡。
2. 部分平衡 1)利用非对称机构平衡 利用两组非对称机构,运动 过程所产生的惯性力方向相反, 互相抵消一部分。
静平衡条件
me = mbrb + m1r1 + m2r2= 0
机械原理-机械的平衡
机械原理-机械的平衡第四讲 机械的平衡一、 刚性转子的静平衡计算 (1)静不平衡转子: 对于轴向尺寸较小的盘状转子(即轴向宽度 b 与其直径 D 之比b /D < 0.2的转子),其质量可以近似认为分布在垂直于其回转轴线的同一平面内。
若其质心不在回转轴线上,则当其转动时,其偏心质量就会产生惯性力。
由于这种不平衡现象在转子静态时即可表现出来,故称其为静不平衡转子 (2)静平衡及其条件: 对于静不平衡的转子进行静平衡时,可利用在转子上增加或除去一部分质量的方法,使其质心与回转轴心重合,即可使转子的惯性力得以平衡,称为静平衡。
静平衡的力学条件:其惯性力的矢量和应等于零或质径积的矢量和应等于零。
静平衡条件表达:形式一: 力条件:0=+=∑∑b IiF FF形式二:质径积条件:0=+∑bb ii rm r m(3)静平衡的计算: 即根据转子的结构,计算确定需在转子上增加或除去的平衡质量,使其设计成平衡的。
对于静不平衡的转子,无论有多少个偏心质量,只需进行单面平衡。
例1 图示盘形回转件上存在三个偏置质量,已知m 110= kg ,m 215= kg ,m 310= kg ,r 150= mm ,r 2100= mm ,r 370= mm ,设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡? 解:111050500 kg mmm r =⨯=⋅ 22151001500 kg mm m r =⨯=⋅ 331070700 kg mmm r =⨯=⋅1r 与3r 共线,可代数相加得3311700500200 kg mmm r m r -=-=⋅ 方向同3r r平衡条件:b b1122330m r m r m r m r +++=r r r r所以依次作矢量()331122,m r m r m r +r r r,封闭矢量b bm r r 即所求,如图示。
22b b 20015001513.275 kg mmm r =+=⋅0200270arctg277.5951500θ=+=︒b b例1图解例2 图示盘状转子上有两个不平衡质量:m 115=.kg,m 208=.kg ,r 1140= mm ,r 2180= mm ,相位如图。
《机械原理》第十章 平面机构的平衡

转子的平衡精度,而应以满足实际工作要求为度。为此,对
不同工作要求的转子规定了不同的许用不平衡量,即转子残 余不平衡量。
许用不平衡量有两种表示方法:
1. 用许用质径积[mr](单位g.mm)表示 此表示比较直观,便于平衡操作。 2. 用偏心距[e] (单位mm)表示 [e] = [mr]/m
设计机构时,可以通过构件的合理布置、加平衡质量或加平 衡机构的方法使机构的总惯性力得到完全或部分平衡。
一、完全平衡法 1)四杆机构的完全平衡 将构件2的m2用集中于
B、C 两点的两个质量代换;
m2B = m2 lCS’2/ lBC m2C = m2lBS’2/ lBC 在构件1和3的延长线上各加一平衡质量,使其质心分 别移到固定轴A和D处: m’=(m2BlAB+m1lAS’1)/r ’
平面机构惯性力的平衡条件
对于活动构件的总质量为m、总质心S的加速度为as的机 构,要使机架上的总惯性力F 平衡,必须满足:
m 0 as=0 F mas 0
机构的总质心S 匀速直线运动或静止不动。
质心不可能作匀速直线 运动
欲使as=0, 就得设法使总 质心S 静止不动。
-F"
平衡原理
F1
F = F1 + F2 F1 L1 = F2L2 可解得 L2 F1 = F L L1 F2 = F L
(1) (2)
Ⅰ
F
F2
Ⅱ
(3) (4) F' L1 F" L2
将力F平行分解到两个平衡基面 上,得F1和F2 ,即 F = F1 + F2 F1 L1 = F2 L2 即 F1 = -F'
机械原理课件-平衡
平衡状态的条件
要达到平衡状态,物体或系统必须满足力的平衡和力矩的平衡两个条件。
惯性力与平衡
惯性力是物体由于自身惯性而产生的力,它对平衡状态有重要影响。不平衡的惯性力会导致物体的运动状态变 化。
平衡控制系统
平衡控制系统通过控制力的大小和方向,使物体或系统保持平衡状态。
平衡系统的设计
设计一个平衡系统需要考虑物体的结构、材料、力学性质等因素,以确保它能够在各种条件下保持平衡。
力的平衡
力的平衡是指作用于物体的各个力的合力为零,物体保持静止或匀速直线运动。
机械原理课件-平衡
欢迎来到机械原理课件关于平衡的介绍。本课程将涵盖平衡的定义、种类、 条件,以及在不同领域中的应用
平衡的定义
平衡是物体或系统处于稳定状态的特性,其中各个力的合力和力矩为零。
平衡的种类
平衡可分为静态平衡和动态平衡ቤተ መጻሕፍቲ ባይዱ静态平衡是指物体处于静止状态,动态平 衡是指物体处于匀速直线运动状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静平衡
适用对象 不平衡 不平衡条 件 平衡基面 平衡实验 b/D<0.2 转子质心不在回转 轴线上 ΣP=0或Σmr=0 1个 刀口或滚轮实验架
动平衡 b/D≧0.2 1转子质心不在回转轴线上 2转子回转时产生不平衡的惯性力矩 ΣP=0和ΣM=0 2个 动平衡实验架
1列转子的质径 积平衡矢量方 程 平衡计算 2作质径积矢量 步骤 多边形 3求出应加的平 衡质量大小和 方位
根据回转件结构情况,也可在质心偏移方向去 掉同等大小质径积来实现静平衡。 导轨式静平衡 架简单可靠,其精度也能满足一般生产需要,其 缺点是它不能用于平衡两端轴颈不等的回转件。 如图为圆盘式静平衡架,回转轴由两个圆盘支 撑,圆盘可绕其轴线转动,试验程序与上相同, 所不同的是平衡架一端支撑高度可调,可平衡两 端轴颈不等的回转件。 这种装置安装和调整都很 简单,但圆盘中心的滚动轴承 容易弄脏,致使摩擦阻力矩增 大,故其精度略低于导轨式静 平衡架。
全被集中在平面
T′和T″两个回转面内的质量所代替,亦即回转时 平面T′和T″内的质量m1′ 、m2′、m3′和m1″、m2″、 m3″与实际回转件1、2、3三个平面上的三个质量 m1 、 m2和 m3所产生的不平衡效果完全相同。 对回转面T′,写出平衡方程
′ ′ ′ ′ mb rb + m1 r r3 = 0 1 + m′ 2r 2 + m3
mb rb + m1r1 + m2r 2+m3r3 = 0
F1
m1
F2
r1
mb
r2
m2Βιβλιοθήκη m3 r3m2r2
F3
m1r1
rb
r3
m3
mbrb
Fb
mbrb求得后,根 据回转件结构确 定rb,之后定出 mb安装方向按图 所示,一般rb选 大,mb选小些。
在转子设计阶段就事先在转子的断面或外周设置 安装配重的螺孔或留出安装配重块的凸起部 还可以用焊 接铆接铣削 等方法。 由上述分析可得出如下结论: 1、刚性转子的静平衡条件是,各偏心质量的离心 惯性力的合力为零,或其质径积的矢量和为零; 2、对于即宽径比 (b/D )小于0.2的刚性转子,无论 其有多少个偏心质量,均只需适当地增加一个平 衡质量即可达到静平衡。
1选择两个平衡基面 2将各质径积分别等效分解到两 个平衡基面上 3分别按每个基面列质径积平衡 方程 4作出两个基面的质径积矢量多 边形 5分别求出两个基面应加的平衡 质量大小和方位
三、转子的平衡精度 经过平衡试验的转子还会存在一些残存的不平 衡量,转子要完全平衡是不可能的,也不需要过高 要求转子的平衡精度,而应以满足实际工作要求为 准。为此,对不同工作要求的转子规定了不同的许 用不平衡量,即转子残余不平衡量。许用不平衡量 有两种表示方法,一是用质径积[mr](单位:g· mm)表 示,另一是用偏心距[e] (单位:mm)表示。 [e] = [mr]/m
二、刚性转子的动平衡 一般是在动平衡机上完成。目前应用最多的是根 据振动原理设计的。由于离心惯性力和惯性力矩 使转子产生强迫振动,故通过测支承处振动信 号,判断需加在两个平衡面内的平衡质量的大小 及方位。分软支承和硬支承。 软支承由两片弹簧悬 挂起来,可沿振动方 向往复摆动,其转子 的工作频率大于支承 系统的固有频率,一 般ω≧2ωn;
′ r1′ = r1′ = r1 ′ ′ ′ r2 = r2 = r2 ′ r3′ = r3′ = r3
则在平面T′内三 个质量分别为 ′ ′ l1 ′ m1 = m1 l ′ ′ l2 m′ m2 2 = l ′ ′ l3 ′ m3 = m3 l
在平面T″内的三个质量分别为 ′ l1 ′ ′ m1 = m1 l ′ l2 ′ m′ = m2 2 l ′ l3 ′ ′ m3 = m3 l 经上述转化,可 以认为回转件的 不平衡质量已完
二、平衡的内容及分类 1.转子的平衡 分刚性转子的平衡和挠性转子的平衡
2.机构的平衡 机构中所有构件的惯性力和惯性力矩,最后以 合力和合力矩的形式作用在机构的机架上。这类 力的平衡问题称为机构在机架上的平衡,或简称 为机构的平衡
转子的平衡 机械中绕某一轴线回转的构件称为转子,如汽轮 机、发电机、电动机等机械都是以转子作为工作 的主题。转子的平衡可分为以下两类: (1) 刚性转子的平衡 当转子的工作转速较低,在运转过程中,弹性 变形很小,完全可以看作是刚性物体,这类转子 称为刚性转子,其平衡问题称为刚性转子的平衡。 (2) 挠性转子的平衡 在高速机械中,当转子转速较高时,转子将产 生明显的变形,这时转子将不能视为刚体,而成 为一个挠性体。这种转子称为挠性转子,其平衡 问题称为挠性转子的平衡。
作向量图,由此求出质径积 mb'rb' 。选定向径rb'后即可 确定mb'。
同理,对回转面T″,写出平衡方程
′ ′ ′ mb rb′ + m1 r1 + m′ r + m r = 0 2 2 3 3
作向量图,由此求出质径积mb"rb" 。选定向径rb" 后即可确定mb" 。
由上述分析可得出如下结论:
一、静平衡试验法 如图所示为导轨式静平衡架,其主体为处于同一 水平面内的两个相互平行的导轨。为减小摩擦, 导轨端口制成刀口或圆弧状。试验时将转子的轴 颈支承在导轨上,令其轻轻自由滚动,若有偏心 质量质心S偏离回转中心,当静止时,在重力作用 下处于铅垂下方 φ=0,用橡皮泥在 铅垂上任意失径 加一平衡质量, 反复试验,直到 转子在任意位置 保持静止。
刚性回转件的平衡 回转件的工作转速较低,变形不大, 可以 看作是刚性物体,称为刚性回转件。 挠性回转件的平衡
机械
当构件转速接近回转系统的第一阶临界转 的平衡 速时,回转件将产生明显的变形,并随转 速的上升而变化,这时回转件不能再视为 刚体,而成为一个挠性体,称为挠性回转 件。 机架的平衡:将所有惯性力和惯性力偶矩 在机架上进行平衡。 本章只讨论刚性回转件的平衡问题。
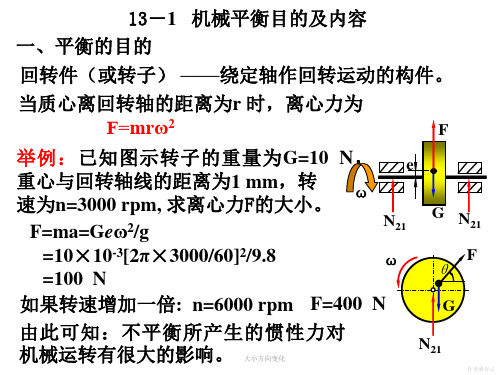
m
F
r
不平衡原因:若构件的质量分布不均匀,则会产 生离心惯性力系的不平衡。
后果:在运动副中产生附加动压力,增大构件中的 内应力和运动副中的摩擦,加剧运动副的磨损,降 低机械效率和使用寿命,引起机械及其基础振动, 造成机械工作可靠性和精度降低、零件疲劳损坏 和噪音,甚至影响和破坏周围的设备和厂房建筑
刚性转子的 静平衡就是 利用在刚性 转子上加减 平衡质量的 方法,使其 质心回到回 转轴线上, 从而使转子 的惯性力得 以平衡的一 种平衡措施。
2.静平衡的计算 已知盘形不平衡转子其偏心质量分别为m1、m2、 m3,向径分别为r1、r2、r3,所产生的惯性力分别 为F1、F2、F3,据平面力系平衡的原理,所加的 平衡质量mb及其向径r可由下式求得:
动平衡的计算方法
以具有三个不平衡质 量的回转件为例。如 图所示,回转件的三 个不平衡质量m1、m2 和m3依次分布在1、2 、3三个回转面内,其 向径分别为r1、r2、r3 在平面1、2、3的两侧分别任选一个回转面T′和T″ ,两平面间的距离以及与1、2、3三个平面的距离 如图所示。
现将平面1、2、3 的质量m1 、m2和 m3分别用平面T′ 和T″内的质量m1′ 和m1″、 m2′和 m2″、 m3′和m3″ 来代替,并且各 代替质量与原质 量的质心向径相 同,即
1、刚性转子的动平衡条件是,分布于不同回转面 内的各偏心质量的空间离心惯性力系的合力及合 力矩均为零; 2、无论其有多少个偏心质量,均只需在任选的两 个平衡平面内增加或减少一个合适的平衡质量, 即可达到动平衡。所需增加的平衡质量最少数目 为2.所以动平衡又称双面平衡,而静平衡称为单面 平衡。 3、经过动平衡设计的转子一定满足静平衡,反之 不一定成立。
第十章 平面机构的平衡 基本要求: 了解机械平衡的目的及其分类,掌握刚性回转件 的平衡的计算。了解刚性回转件平衡的试验法。 重点: 1.静平衡和动平衡的条件及静平衡与动平衡的区别 2.用向量图解法求静平衡和动平衡条件下平衡质量 的相位和质径积的方法 难点 :
动平衡条件下平衡质径积的确定
一、机械平衡的目的 构件在运动过程中都将产生惯性力和惯性力矩, 这必将在运动副中产生附加的动压力,从而增大 构件中的内应力和运动副中的摩擦,加剧运动副 的磨损,降低机械效率,甚至引起机械振动和降 低其使用寿命。消除惯性力和惯性力矩的影响, 改善机构工作性能,就是研究机械平衡的目的。 为了平衡,做两方面的工作:首先,在机械的 设计阶段,对所设计的机械在满足其工作要求的 前提下,应在机构上保证其不平衡惯性力最小或 为零,即进行平衡设计。其次,设计达不到要求, 此时需要用试验的方法加以平衡,即进行平衡试 验。
硬支承的转子直接支撑在刚度较大的支撑架上, 转子工作频率远小于支承系统的固有频率,一般 应在ω≦0.3ωn的情况下工作;
带计算机系统的硬支承动平衡机工作原理图,由 计算机给出转子两平衡面内需加平衡质量的大小 和方位,这些工作是由软件实现的。
平衡试验是在 停机状态下完 成的,对于大 型旋转机械, 如汽轮发电机 组起停一次, 要造成很大的 经济损失。今 后发展是在线 自动平衡仪。
10.2刚性转子的静平衡和动平衡 10.2.1静平衡及其计算 1、静平衡 对于轴向尺寸较小的盘形转子,即宽径比 (b/D )小 于0.2的零件,如齿轮、凸轮、链轮及带轮等,其 质量可近似认为分布在同一回转平面内。如图所 示,红色小块为偏心质量,由于偏心质量的存在, 转子在运转过程中必然产生惯性力,从而在转动 副中引起附加动压力。刚性转子的静平衡就是利 用在刚性转子上加减平衡质量的方法,使其质心 回到回转轴线上,从而使转子的惯性力得以平衡 的一种平衡措施。
二、动平衡及其计算 转子的宽径比(B/D)大于0.2时,其质量就不能视为 分布在同一平面内了。这时,其偏心质量分布在 几个不同的回转平面内。
如下图所示。此 时,即使转子的 质心位于回转轴 上,也将产生不 可忽略的惯性力 矩,这种状态只 有在转子转动时 才能显示出来的 不平衡状态称为 动不平衡。