UMC22_Bas_20081215 智能电机控制器解析
SMC智能电机控制器及应用
行 的故 障率, 为 了机 车安 全运 行起
到 了 积 极 的 作 用 。通 过 这 项 研 制 工 作 ,我 们 认 为还 有 以下 工作 要 做 : 还 需要 进 行 经过 振 动 试验 等 试 验 ,
牵引风 机K M4
X6
—
T1
卜— 卜
Y4
正 勰 常
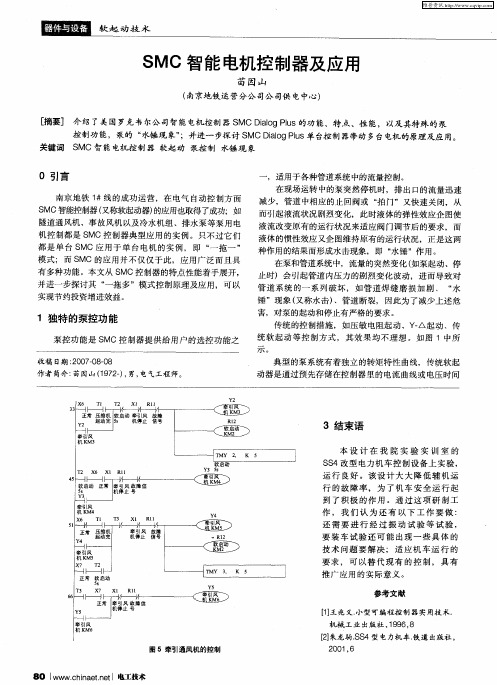
图 5 牵引通风 机的控制
2 0 6 0 1,
8O J W.h a t e WW c i e. t n n J电工技术
维普资讯
软起 动技 术
醚
韧/ 始 l 转 0 矩 %
图 1泵 系统转矩速度特性 曲线
l 一直接起动
\/ 软 停 机
一
,
适用于各种管道系统 中的流量控制。
在 现场 运 转 中的泵 突 然停 机 时 ,排 出 口的 流量 迅 速
减少,管道中相应的止 回阀或 “ 拍门”又快速关闭,从 而引起液流状况剧烈变化,此时液体的弹性效应企图使 液流改变原有的运行状况来适应 阀门调节后的要求,而
液 体 的惯 性 效 应 又企 图维 持 原有 的运 行 状 况 ,正 是 这两 种 作 用的结 果 而形 成水击 现 象 ,即 “ 锤 ”作 用 。 水
S MC智能控制器 ( 又称软起动器) 的应用也取得了成功;如 隧道通风机、事故风机以及冷水机组、排水泵等泵用电 机控制都 是 S C控制器典型应用 的实例 。只不过它们 M 都 是单台 S MC应 用于单台 电机的实例 ,即 “ 一拖一 ”
模 式 ;而 S C 的 应 用 并不 仅 仅 于 此 ,应 用 广 泛 而 且 具 M
Tl
I ' 2
Xl
R l l
/ 可 、 , r 、 \ 扭 3 / 、 /
pcs-222b智能操作箱说明书

PCS-222B 智能操作箱
技术和使用说明书
南京南瑞继保电气有限公司版权所有 本说明书和产品今后可能会有小的改动,请注意核对实际产品与说明书的版本是 否相符。 更多产品........................................................................................................................................................ 1 1.1 应用范围 ........................................................................................................................................ 1 1.2 功能配置 ........................................................................................................................................ 1 1.3 装置特点 ........................................................................................................................................ 1 2 技术参数 ................................................................................................................................................ 3 2.1 机械及环境参数 ............................................................................................................................. 3 2.2 额定电气参数 ................................................................................................................................ 3 2.3 主要技术指标 ................................................................................................................................ 3 3 软件工作原理 ........................................................................................................................................ 5 3.1 跳闸逻辑 ........................................................................................................................................ 5 3.2 合闸逻辑 ........................................................................................................................................ 6 3.3 跳合闸回路完好性监视 ................................................................................................................ 7 3.4 压力监视及闭锁 ............................................................................................................................ 9 3.5 闭锁重合闸 .................................................................................................................................... 9 3.6 其它合成信号 .............................................................................................................................. 10 4 硬件构成 .............................................................................................................................................. 12 4.1 装置硬件结构 .............................................................................................................................. 12 4.2 面板布置图 .................................................................................................................................. 12 4.3 背板布置图 .................................................................................................................................. 13 4.4 输入输出定义 .............................................................................................................................. 13 4.5 各插件简要说明 .......................................................................................................................... 14 4.6 机械结构与安装 .......................................................................................................................... 20 5 使用说明 .............................................................................................................................................. 21 5.1 指示灯说明 .................................................................................................................................. 21 5.1 报警信息 ...................................................................................................................................... 21 5.3 安装注意事项 .............................................................................................................................. 21
智能电机控制中心(IMCC)行业分析

智能电机控制中心(IMCC)行业分析天风证券刘炜一、智能电机控制中心行业分类智能电机控制中心(Intelligent Motor Control Centers,简称IMCC)是一种将设备网(DeviceNet网)技术、通讯技术、控制网技术融入到传统的电动机控制中心(Motor Control Centers,简称MCC),将MCC中各回路单元通过网络与控制单元进行数据通讯,使之成为一个设备网层面的自动控制系统。
IMCC 采用标准的现场总线或其他数字通讯方式将具有通讯能力的元器件连接起来,通过控制器或上位机实现对现场设备、电网或其他控制器等的遥测、遥控、遥讯中部分或全部功能的成套设备。
IMCC功能强大,一并具有控制、监视、保护和通信功能。
可以提供电机位置和速度伺服控制功能,满足工业应用领域的各种基本要求。
可以对运行数据进行测量、统计和分析,为预警提醒、管理维护和故障排查提供依据,提高设备有效运行率。
较传统MCC硬接线方式,可以减少硬件成本,降低故障排查难度。
标准化模式也使其自身实现了模块化生产组装和设计。
IMCC现已广泛应用于国民经济的各个领域,尤其是石油化工、冶金、造纸、建材、纺织、食品加工、制药、电力等需要过程控制的领域。
根据中国证监会2012年发布的《上市公司行业分类指引》,该行业属于“C 制造业”中的“C38电气机械和器材制造业”;根据《国民经济行业分类》(GB/T 4754-2011),该行业属于“C制造业”中的“C38电气机械和器材制造业”中的“382输配电及控制设备制造”。
二、智能电机控制中心行业状况整个电机控制系统的智能化、网络化和远程控制将是大势所趋。
电机控制系统不但是转换和传送能量的装置,也是传递和交换信息的通道。
智能制造装备(包含IMCC)是高端装备的核心,是制造装备的前沿和制造业的基础,已成为当今工业先进国家的竞争目标。
(一)产业政策推动当前,智能制造装备的发展趋势以德国的“工业4.0”和美国的“工业互联网装备“最为清晰。
UMC22电机综合保护器

U M C22电机综合保护器说明1、保护器机构说明2、常见故障及解决方法故障代码故障描述解决方案过载故障过载或者缺相或堵转会触发该故障,该故障发生后保护器处于冷却状态,此时不允许起动电机,屏幕出现℃符号闪烁,点击回车键确认或等待120S冷却时间过后即可重新起动。
检查电机及机械是否故障导致电机电流过大。
堵转故障电流过大,超过堵转电流限制。
检查设备。
通讯故障保护器DEVICENET通讯故障。
检查通讯插头是否插好,检查通讯线是否短路或者开路,检查保护器站号是否设置正确。
参数超限故障保护器检测到的返回数值超出设定的上限或者下限。
这个故障主要出现在在对额定电流的设定超出范围。
保护器直接可以检测最大63A电流,超过时要将FACTOR 参数按照互感器变比设定数值。
例如互感器100/5则设定FACTOR参数为20即可。
在小于63A时,FACTOR参数为1。
电流检测返回故障保护器启动电机后300毫秒内未检测到电流。
这个故障在参数设定检测电流时才会起作用,我们这里一般设定检测接触器的返回点,则该故障无效。
没有启动命令故障未开执行器就有返回信号该故障只在执行器机构时发生,没有开执行器时,就有开信号返回。
接触器无返回故障(当返回点接到DI1时)在参数设定检测接触器返回后,该故障有效。
在起动命令发出后,300毫秒内在DI1输入点上没检测到接触器的返回信号报该故障。
检查接触器及接线。
在听到接触器吸和后如果报该故障则检查辅助点及返回点接线及24V信号电源。
在接触器未吸和时检查接触器线圈及输出点或者输出中间继电器,及控制电源220V保险。
接触器无返回故障(当返回点接到DI0时)在参数设定检测接触器返回后,该故障有效。
在起动命令发出后,300毫秒内在DI1输入点上没检测到接触器的返回信号报该故障。
检查接触器及接线。
在听到接触器吸和后如果报该故障则检查辅助点及返回点接线及24V信号电源。
在接触器未吸和时检查接触器线圈及输出点或者输出中间继电器,及控制电源220V保险。
详细讲解罗克韦尔智能电机控制的新功能
罗克韦尔-智能马达控制功能之详细讲解一、直接启动1、ARCSHIELDTM 全压不可逆控制器对于要求高级人员保护的行业,罗克韦尔自动化提高了Allen-Bradley®CENTERLINE® 中压控制产品的安全性,包括可选的抗电弧级控制设备。
不同于大多数其它中压供应商,400 和600 安培one-high(单高)控制器和400 安培two-high(双高)控制器既满足ANSI/IEEEC37.20.7 对抗电弧控制的测试要求,同时仍保持国内可靠控制组件的标准,可继续服务于全球工业领域。
2、DEVICENETTM 组态终端(193-DNCT)193-DNCT DeviceNet 组态终端是可用于调试、组态、编程和监测DeviceNet网络上其它设备的手持式设备。
该新模块允许用户查看网络上所有设备,对每个设备的状态进行显示。
此外193-DNCT 可通过网络对DeviceNet 设备上载、存储并下载完整的设备组态。
193-DNCT 还拥有向用户显示DeviceNet 物理层诊断信息和网络带宽统计信息的能力。
3、E1 PLUS 侧面安装模块Allen-Bradley E1 Plus 电子式过载继电器是业界第一款实现自供电的模块化设备。
使用可选的侧面安装附件模块,E1 Plus 过载继电器将得到高性价比的模块扩展和机器操作,并提高了保护性能。
在现有的DeviceNet 模块(193-EDN)和堵转模块(193-EJM)已有性能的基础上,最近公司又推出四个新型的E1 Plus侧面安装模块:E1 Plus 接地故障保护的侧面安装模块(193-EGF)该新型的侧面安装模块具有可调节平衡点的接地故障保护特性,且接地故障电流范围为:20-100 mA、100-500 mA、0.2-1.0 A、1.0-5.0 A。
50 ms ±20 ms 的跳闸延时和动态跳闸禁止。
该模块还具有远程复位功能。
UM系列低压伺服一体机使用手册说明书

UM系列低压伺服一体机使用手册版权声明安全有关的符号说明版权声明SYNTRON森创®是北京和利时电机公司(以下简称和利时电机)于2005年推出的产品品牌。
这个品牌浓缩了公司的核心技术和影响力,是公司始终注重自主创新,保持技术优势的体现。
说明书的内容参照了相关法律基准和行业基准。
如对本说明书提供的内容有疑问,请向销售人员咨询,致电客服热线,联系官网客服或致信本公司。
和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等权力。
手册请联系销售人员,或在和利时电机的官方网站下载相关手册。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本使用说明书的著作权,未经许可,不得修改、复制使用说明书的全部或部分内容。
安全有关的符号说明本说明书中与安全有关的内容,使用了下述符号。
标注了安全符号的都为重要内容,请务必遵守。
安全注意事项注意事项⏹版权声明安全有关的符号说明目录第一章产品概况 .......................................................................................... - 1 -1.1产品概况 .................................................................................................................. - 1 -1.2型号命名规则 .......................................................................................................... - 1 -1.3安装尺寸图 .............................................................................................................. - 2 -1.4重量 .......................................................................................................................... - 2 -1.5性能参数 .................................................................................................................. - 2 -1.6规格型号说明 .......................................................................................................... - 3 -1.7配件组成 .................................................................................................................. - 3 -第二章配线 ................................................................................................. - 4 -2.1供电端子的接线 ...................................................................................................... - 4 -2.2输入输出接口定义 .................................................................................................. - 4 -2.3保险 .......................................................................................................................... - 5 -2.4指示灯 ...................................................................................................................... - 5 -第三章运行 ................................................................................................. - 6 -3.1试运行基本流程 ...................................................................................................... - 6 -3.2内部速度模式运行 .................................................................................................. - 7 -3.3位置模式运行 .......................................................................................................... - 7 -3.4通讯模式运行 .......................................................................................................... - 7 -3.5恢复出厂默认参数 .................................................................................................. - 8 -3.6驱动器使用教程 ...................................................................................................... - 8 -3.7在线升级步骤 .......................................................................................................... - 8 -3.8电机编码器自学习步骤 .......................................................................................... - 8 -第四章参数与功能..................................................................................... - 10 -4.1Fn参数清单 .......................................................................................................... - 10 -4.1.1Fn参数位说明................................................................................................... - 10 -4.1.2Fn参数功能....................................................................................................... - 10 -4.2Dn参数清单 .......................................................................................................... - 15 -4.2.1Dn参数位说明 .................................................................................................. - 15 -4.2.2Dn参数功能 ...................................................................................................... - 15 -4.3Pn参数清单 .......................................................................................................... - 16 -4.3.1Pn参数位说明 .................................................................................................. - 16 -4.3.2Pn参数功能 ...................................................................................................... - 16 -第五章故障报警及处理.............................................................................. - 18 -5.1驱动器故障代码及解决方法 ................................................................................ - 18 -5.2驱动器异常现象及解决办法 ................................................................................ - 19 -产品概况第一章产品概况1.1 产品概况UM系列伺服是北京和利时电机公司推出的新一代高性能、高可靠性的低压伺服电机驱动一体机,采用了先进的全数字电机控制算法,可对伺服电机的位置、速度和转矩进行精确控制。
dsas-15umc
DSAS-10/15UMC全数字交流伺服驱动系统 使用手册二〇〇五年八月目录第一章 概述 ------------------------------------------------------------------------- 1-11.1 性能指标 ---------------------------------------------------------------------- 1-11.2 应用范围 ---------------------------------------------------------------------- 1-1 第二章 安装与接线 ------------------------------------------------------------------- 2-12.1 安装场合 ---------------------------------------------------------------------- 2-12.2 安装方法 ---------------------------------------------------------------------- 2-12.3 接线 ------------------------------------------------------------------------- 2-32.3.1 接线注意事项 ------------------------------------------------------- 2-32.3.2 线径尺寸 ------------------------------------------------------------- 2-42.3.3 标准接线例 ---------------------------------------------------------- 2-52.4 配线 ------------------------------------------------------------------------- 2-72.5 信号说明 ---------------------------------------------------------------------- 2-82.6 输入/输出接口类型 --------------------------------------------------------- 2-112.6.1 数字量输入接口 --------------------------------------------------- 2-112.6.2 数字量输出接口 --------------------------------------------------- 2-112.6.3 脉冲量输入接口 --------------------------------------------------- 2-122.6.4 模拟量输入接口 --------------------------------------------------- 2-142.6.5 伺服电机光电编码器输入接口 --------------------------------- 2-152.6.6 编码器脉冲输出接口 --------------------------------------------- 2-15 第三章 参数 ------------------------------------------------------------------------- 3-13.1 参数一览表 ------------------------------------------------------------------- 3-13.2 参数功能 ---------------------------------------------------------------------- 3-4 第四章 报警与处理 ------------------------------------------------------------------- 4-14.1 报警一览表 ------------------------------------------------------------------- 4-14.2 报警处理方法 ---------------------------------------------------------------- 4-24.3 常见故障分析 ---------------------------------------------------------------- 4-8 第五章 显示与键盘操作 ------------------------------------------------------------- 5-15.1 键盘操作 ---------------------------------------------------------------------- 5-15.2 监视方式 ---------------------------------------------------------------------- 5-15.3 参数设置 ---------------------------------------------------------------------- 5-45.4 参数管理 ---------------------------------------------------------------------- 5-45.5 试运行 ------------------------------------------------------------------------- 5-65.6 JOG运行 ---------------------------------------------------------------------- 5-65.7 AU操作 ------------------------------------------------------------------------ 5-65.8 其他 ------------------------------------------------------------------------- 5-6第六章 通电运行 ---------------------------------------------------------------------- 6-16.1 接地 ------------------------------------------------------------------------- 6-16.2 工作时序 ---------------------------------------------------------------------- 6-16.2.1 电源接通次序 ------------------------------------------------------- 6-16.2.2 时序图 ---------------------------------------------------------------- 6-26.3 注意事项 ---------------------------------------------------------------------- 6-36.4 试运行 ------------------------------------------------------------------------- 6-36.4.1 运行前的检查 -------------------------------------------------------- 6-36.4.2 通电试运行 ----------------------------------------------------------- 6-46.5 调整 ------------------------------------------------------------------------- 6-46.5.1 基本增益调整 ------------------------------------------------------- 6-46.5.2 基本参数调整图 ----------------------------------------------------- 6-56.6 相关知识 ---------------------------------------------------------------------- 6-56.6.1 位置分辨率和电子齿轮的设置 ---------------------------------- 6-56.6.2 位置控制时的滞后脉冲 ------------------------------------------- 6-6 第七章 产品规格 ---------------------------------------------------------------------- 7-17.1 驱动器规格 ------------------------------------------------------------------- 7-17.2 SCG系列伺服电机规格 -------------------------------------------------- 7-27.3 SCG系列伺服电机型号说明---------------------------------------------- 7-27.4 SCG系列伺服电机外观图及尺寸 --------------------------------------- 7-37.5 伺服驱动器外形和安装尺寸------------------------------------------------ 7-47.6 伺服驱动器型号说明--------------------------------------------------------- 7-4 第八章 选件 ------------------------------------------------------------------------- 8-18.1 再生放电电阻 ---------------------------------------------------------------- 8-18.1.1 DSAS-XXUMC使用再生电阻接线说明 ------------------------- 8-18.1.2 外部再生电阻外形尺寸 ------------------------------------------- 8-28.2 电源变压器 ------------------------------------------------------------------- 8-28.2.1 变压器电压 ---------------------------------------------------------- 8-28.2.2 变压器的外形及安装尺寸 ---------------------------------------- 8-28.2.3 变压器的连接 ------------------------------------------------------- 8-38.3 电缆 ----------------------------------------------------------------------------- 8-28.3.1 编码器反馈电缆接线 ---------------------------------------------- 8-48.3.2 电机动力头接线 ---------------------------------------------------- 8-4第一章概述第一章概述采用DSP(数字信号处理器)芯片,大大加快了数据的采集与处理速度,使电机运行性能良好应用大规模门阵列电路,使产品具有很高的可靠性使用最新的功率器件IPM,使驱动器体积大为减小操作简便,仅四键就能很方便地进行试运行、监视及参数设置监视功能允许显示17个参数状态,包括电机回转速度、反馈脉冲、指令脉冲、输入\输出端口电平及电机电流等具有脉冲位置及模拟速度二种输入控制方式,系统配置更加灵活可设置位置指令脉冲的倍率(电子齿轮输入)可设置位置输出脉冲的倍率(电子齿轮输出)位置/速度二种控制模式外观简洁,结构紧凑1.1 性能指标宽速比、恒转矩:调速比为1:5000高速度、高精度:最高转速可达3000转/分,回转定位精度1/10000转1.2应用范围DSAS-XXUMC系列功率范围为0.4KW~5.4KW(2NM~33NM),可广泛应用于车床、铣床、加工中心等各种机床加工设备,而且还能满足印染、包装以及自动化流水线上的各种机械传动的需要。
微型电动机管理控制器设计说明
微型电动机管理控制器设计一、概述微型电动机管理控制器MMC micro适用于普通三相交流异步电动机,是将电动机的测量、保护和控制功能集合于一体的综合性智能装置,适合于额定电压为AC380V和AC660V的电动机。
MMCmicro对电动机的过载、过热、堵转、相不平衡、缺相、外部故障、低/过电压、低功率、失速、接地或漏电、晃电等故障引起的危害予以保护,同时还具有测量、控制、管理和总线通讯等功能。
MMCmicro基于微机处理技术,采用模块化结构设计,产品体积小,结构紧凑,安装方便。
它与电动机控制中心〔MCC〕中常用的分散装置相比可以大大简化电气回路和控制回路结构,提高电动机控制的可靠性、安全性及先进性,同时也降低了综合成本。
常规控制方式与MMC micro控制方式比较〔如图1〕:图1MMC micro 功能●测量显示功能每相电流有效值、每相电压有效值、功率〔有功、无功、视在〕、功率因数、电度、接地故障漏电流、负荷百分数、已用热容量、相不平衡百分数、频率、开关量输入状态等。
●保护功能MMC micro保护功能全面,具体功能包括:过负荷、相不平衡/缺相、转子堵塞/制动、接触器故障、低/过电压、低功率、启动加速超时、接地/漏电保护等。
●控制功能MMC micro提供6路可编程开关输入量、1路4—20mA模拟量输出〔采用二线制,需有外部提供DC24V〕、2路主继电器输出、2路可编程的辅助继电器输出、晃电自动重启动等功能。
MMC micro的开关量输入根据用户需要可选择AC220V和DC220V等电压输入,所有输入信号电隔离。
MMC micro技术参数●工作电源直流供电电压:DC220V 允许偏差:±20%交流供电电压:AC220V/50HZ 允许范围:165V~265V功耗:15VA<最大>,10VA〔额定〕●通讯MMC micro 为了满足工业现场控制要求,配有现场总线接口,有Modbus RTU和Profibus-DP两种通讯规约供选择。
UMC-4全局电动机控制器用户指南说明书
UMC-4Universal Motor Controller U S E R M A N U A L Date: 9th February 2015•Wireless Zoom Unit WZU-3•Controlled Lens Motor CLM-2•Controlled Lens Motor CLM-3•Controlled Lens Motor CLM-4•Lens Data Encoder LDE-1•Ultrasonic Distance Measure UDM-1Note: Use only one lens motor per lens axis.Note: Up to three hand units can be connected to one UMC-4 in parallel to form a radio network.Connector PinoutsSerial1 GND Ground2 +12V 12V output, max 200mA3 TxD/Tx– RS232/RS485 – RS4224 RxD/Rx+ RS232/RS485 – RS4225 Tx+ RS422 line6 Rx– RS422 lineLCS1GND Ground 2n.c. 3CAN-L CAN bus 4CAN-H CAN bus 5 +V-BAT Battery supply outputCAM1GND Ground 2+V-BAT 9.5 V to 34 V DC IN 3CAM-TYPE Camera type sense, analog input 4Rx- RS422 line 5RUN-SW1 Opto switch1 connects to pin 13 @REC (max. 100 mA/50 V) 6Tx+ RS422 line 7CAN-L CAN bus 8n.c.9 TALLY Tally, analog input, active high (default value:1.25 V transition level)10 D-CAMTally, digital input, active low,TALLY11 DAC-CAM REC analog output, active high (default value@REC: 3.3 V)12 R/S ARRI R/S13 RUN-SW2 Opto switch 2 connects to pin 5 @REC (max.100 mA/50 V)14 RxD/Rx+ RS232/RS485 – RS422 together with pins 4, 6,1515 TxD/Tx- RS232/RS485 – RS422 with pins 4, 6, 1416 CAN-H CAN busFOCUS/IRIS/ZOOM1 GND Ground2 MTYPE-A Motor type sense3 MTYPE-B Motor type sense4 MTYPE-C Motor type sense5 +5V Encoder supply6 Encoder-A Encoder input A7 Encoder-B Encoder input B8 n.c.9 n.c.10 n.c.11 Motor + Motor drive output12 Motor – Motor drive outputRS IN1GND Ground 2+V-BAT 9.5 V to 34 V DC IN 3R/S ARRI R/STC1GND Ground 2LTC-IN Timecode input 3n.c. 4n.c. 5LTC-OUT Timecode outputDimensions and WeightWeight (including antenna): 428 gElectrical DataSupply Voltage: 9.5 V to 34 V DC (full motor speed) Current Consumption: 135 mA@12 V (radio on/ready)70 mA@24 V (radio on/ready) Operating Temperature: -20 to +50 °C (-4 to +122 °F)Radio SystemThe UMC-4 contains a radio unit that enables wireless lens control and lens data communication with a white coded radio module. A white ring at the base of the antenna mount point identifies it. It offers 8 channels to choose from:Channel Frequency0 2.410 GHZ1 2.415 GHZ2 2.430 GHZ3 2.435 GHZ4 2.450 GHZ5 2.455 GHZ6 2.470 GHZ7 2.475 GHZWhite radio and legacy yellow radio cannot be mixed in the same radio network of camera and hand units. It is possible to use both systems in parallel within different radio networks.。
智能型集成电动机控制系统(IMCS)的应用与发展(苏州万龙)
CCU采用现场总线双网冗余方式时,现场MCU均需具备双通讯端口,所有MCU的一个端口(工作
端口)均接入第一个总线网络,所有MCU的另一个端口(备用端口)均接入第二个总线网络,如此形成
两个独立工作的总线网络。正常工作时,一个总线网络进行通讯,另一个总线网络备用。一旦其中工作网
络上的MCU通讯端口出现故障,或网络链路出现通讯故障及介质断裂,该网络上所有工作端口出现通讯 中断的的MCU立即通过备用通讯端口进行通讯,CCU同时启动备用总线网络接受来自MCU备用端口的 数据信息,同时关断工作网络上相应的MCU通讯,即保证了通讯链路的冗余可靠,又保持了CCU获取数 据的唯一正确性。 CCU采用双机热备和现场总线双网冗余相结合的方式,兼具了CCU、MCU和现场总线的全方位冗余,
电动机的使用更缺乏科学的管理和维护,设备故障率高,以致造成生产效率低下,设备使用寿命缩短,维
护成本居高。因此对低压电动机的综合保护、控制、监视一体化解决方案是生产过程控制系统中需要格外 关注的问题。智能型集成电动机控制系统(IMCS)实现了这一构想,其在工业生产中的应用及发展是我 们需要深入探讨的问题。 2传统电动机控制方式
给工作机,自身仍转换回备份状态,继续监视工作机的运行情况,从而实现冗余备份的功能。主机和备份 机之间可采用以太网和串口通讯两种方式连接,实现“冗余监听”,正常状态下,备份机通过以太网实时
监听工作机工作状态,如果以太网出现异常,备份机通过串口通讯方式实行监听工作机工作状态的任务, 保证了双机热备的高可靠性,从而保证IMCS系统内的任何故障都不会影响系统的稳定性。
的各类电动机负荷安全、稳定、可靠的运行,并使生产现场摆脱“信息孤岛”的束缚,实现底层设备的信息 开放。IMCS全称为集成电动机控制系统(Integrated Motor
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
标签
ACS100-PAN: 控制盘 (选件)
^^
完整从机
总线接头
© ABB Group - 8 19-Oct-18
操作运行
通过控制系统和现场总线进 行控制 手动控制可通过面盘进行 手动控制可通过开关/按钮 数字输入进行
^^
© ABB Group - 9 19-Oct-18
数据 概览
局域网LAN
传统 : , 控制 , 保护与通讯 传统 : 控制 保护与通讯
用现场总线: 通讯与控制功能的分离
总 线
通讯
接口连接器
通讯 + 控制 + 保护 控制与保护
规划和调试的优势 控制部分功能统一, 总线独立 在调试前最后决定现场总线型号
维修和故障排除的优势
© ABB Group - 3 19-Oct-18
电流调节
设定电流 1, 设定电流 2 (2-速电机)
过载保护
脱扣级别, 缺相保护, 堵转保护 电流阀值, …
© ABB Group - 14 19-Oct-18
通讯故障反应
服务数据 (只读)
运行时间 开关周期次数 脱扣次数
读 / 写参数
我们的经验表明, 将UMC22接入不同型号/供应商的自动化系统: ---> 所用自动化系统的专家只需几分钟即可完成通讯. 遗憾的是没有统一的步骤适应所有类型的自动化系统
控制部分功能失效,但通讯部分保持总线畅通与监控 更换后自动重起动 当通讯失效时,控制和保护仍能工作
建立一个现场总线
1. 2. 3. 4. 5. 将设备安装并连接 连接到自动化系统 连接其它设备 用控制盘编址 在自动化系统中编写应用程序
CPU 中央处理 单元
藕合器, 总线 主机
^^
地址
© ABB Group - 4 19-Oct-18
局域网
DeviceNet: 读和写参数 任何时候. PROFIBUS DP (/V0) 在上电时通过GSD 文件写参数. 不能读. --> 主机 级别 1 PROFIBUS DP/V1 读和写参数 任何时候.. -->主机 级别 2
CPU
藕合器
现场总线
© ABB Group - 15 19-Oct-18
© ABB Group - 1 19-Oct-18
现代成套设备 智能电机保护与电 机控制
目录
现场总线系统
UMC22, 概榄 UMC22, 数据:输入/输出 电报 UMC22, 参数 UMC22, 控制盘, 地址 UMC22, 维护
© ABB Group - 2 19-Oct-18
现场总线系统
^^
© ABB Group - 11 19-Oct-18
监视与命令电报
设备输入 设备输出
DI0
DI1
DI2
DI3
DI4
DI5
DO0*
7
DO1*
6
DO2*
5 4 3 2 1 0
监视电报. 字节 0 监视电报.字节1 监视电报.字节 2,3 命令电报.字节 0
警告
故障
本地控制
超时*
-
正转
关
反转*
DI0
多功能电机控制器 UMC22 – 概榄
集成电机控制与保护
电流范围 0.24 to 63 A 一个型号涵盖 用外接电流互感器连接电流高 达 800 A 电子过载保护 6 数字输入 (24 VDC) 3 继电器输出 (230 VAC) 总线独立接口 可前装控制盘
© ABB Group - 5 19-Oct-18
DI1
DI2
DI3
DI4
DI5
-
-
电机电流为设定值的 % 故障复位 自动方式 正转 关 反转* -
命令电报.字节 1
DO0*
DO1*
DO2*
© ABB Group - 12 19-Oct-18
*
模块输入总是由总线监视, 输出部分地- 取决于控制功能专用于控制接触器,灯等.
诊断电报
监视电报.字节 0
07KT97
参数调整 诊断/服务数据
现场总线
监视, 测量值, 命令
© ABB Group - 10 19-Oct-18
^^
设备输入/输出
设备输入和输出
端子 设备输入 端子 设备输出 13 14 15 16 17 18
DI0
7
DI1
8
DI2
9
DI3
DI4
DI5
DO0*
DO1*
DO2*
*
模块输入总是由总线监视, 输出部分地- 取决于控制功能专用于控制接触器,灯等.
警告
故障
本地控制
超时*
'-
正转
关
反转*
7
6
5
4
3
2
1
DI2
自测试
-
-
回查 故障 DO2
-
-
故障信号.字节 1
过载 (跳闸) 电流 超高限
参数范围 电机堵转 通讯故障 不符
回查故 障电流 超时 运行
回查
故障 DO1
回查
故障 DO0
警告.字节 2
电流 低下限
© ABB Group - 16 19-Oct-18
0V 24V 外部 (EXT) 电源
24V 供电 至输 入端
DI0 DI1 DI2 DI3 DI4 ----- 监视信号至总线 ----
选型时需考虑通孔直径.
电流范围高达 850 A 体 积小,价格好的电流互 感器已能供货. 额外的连接组件,与接 触器 A145/AF145 到 AF750相连接.
^^
© ABB Group - 7 19-Oct-18
注: 根据 LVSG 实际电流显示为"设定电流"的 % .
结构
电流互感器
控制单元
^^
功能参数设置: 输入/输出模块
230 V DO0 DO1 DO2 690 / 400 V
5
开关
6 DO C
7 DO 0
8 DO 1
9 DO 2
UMC22
现场总线 接头
外
内
DO C
0 V 10
24 V 11
24 V 12
DI 0 13
DI 1 14
DI 2 15
DI 3 16
DI 4 17
DI 5 18
-
冷却时间 运行
故障信号.字节 3
© ABB Group - 13 19-Oct-18
参数数字 (如故障信号 "参数超出范围")
参数
电路, 连线
控制功能
过载, 直接起动, 星-三角起动,….
附加控制功能:
通过输入本地控制, 通过辅助触点回查, 故障输入例如对热敏电阻模块, 故障输出, …
保护特性
电子马达保护电流范围
0.24 至 63 A
脱扣等级 5, 10, 20, 30 缺相保护 转子堵转保护 故障输入
紧急停车
© ABB Group - 6 19-Oct-18
外部热敏电阻 / 对地故障 模块或
外部电流互感器
所有型号的保护电流互感器 级别 5P10 (EN60044).