机械动力学
机械动力学
…………………② …………………③ 阻力(矩)不变。
M r0 r M d d
0 Md Md
=
不计摩擦驱动力(矩)
计摩擦驱动力(矩) 计摩擦阻力(矩)
Mr = 0 Mr
不计摩擦阻力(矩)
驱动力(矩)不变。
第四节 刚性转子的平衡设计
1.静平衡设计(D/b5)
o表征几何形状对摩擦力的影响。
θ
Q
θ
N 21 2
②
N 21 2
①
3)o 总汇 (1) 简单平面移动副
o =
N21
v12 P
f21 1 2 Q
3)o 总汇
(2) V形槽移动副
Q
o=/sin
θ
θ
N 21 2
②
N 21 2
①
3)o 总汇
比较槽面摩擦:o=/sin
(3) 三角螺旋副 Q
34
FR R32
1 4
2
R41
R43
R12
21 23
Md R41
2
R43
FR
1
4
3 V34
R32
【教师例7-2】图示平底摆动从动件盘状凸轮机构的 凸轮为圆盘,摩擦圆、摩擦角、驱动力矩Md、阻力FR 如图所示。试画出图示机构的静力分析图。
【解】 R12 2 R32 FR
1、Md
二、单自由度系统等效力学模型的建立 1.建立系统运动方程 建立依据: dE dW Ndt
1 1 1 1 2 2 2 2 J J m m E S1 1 S2 2 2 S2 3 S3 2 2 2 2 N M d 1 m2 g S 2 cos Fr S 3
机械动力学课程教学大纲

机械动力学课程教学大纲一、课程简介机械动力学是机械工程中的重要基础课程之一,主要研究物体的运动规律和动力学原理。
本课程旨在培养学生对物体运动的分析和动力学理论的理解能力,为学生提供运动学和动力学的基础知识,为他们今后的学习和研究奠定牢固基础。
二、教学目标1. 培养学生对物体运动的观察和分析能力;2. 熟悉运动学和动力学的基本概念和原理;3. 掌握常见的力学定律和公式;4. 培养学生的问题解决能力和实践能力;5. 培养学生的团队合作能力和沟通能力。
三、教学内容1. 运动学基础1.1 位置、位移和速度1.2 加速度和曲线运动 1.3 圆周运动和角速度1.4 相对运动2. 动力学基础2.1 牛顿运动定律2.2 动量和动量守恒2.3 力和加速度2.4 动能和功2.5 能量守恒和机械能3. 静力学3.1 弹簧力和弹性势能 3.2 引力和万有引力定律3.3 惯性力和离心力4. 动力学4.1 圆周运动的力学分析4.2 非惯性系和转动惯量4.3 力矩和角动量4.4 角动量守恒和刚体转动4.5 飞行器的运动学和动力学四、教学方法1. 讲授理论知识:通过课堂讲解、示范等方式,向学生介绍理论知识和基本概念。
2. 实验教学:设计相关实验,让学生进行实验操作和数据分析,提高他们的实践能力。
3. 小组讨论:设置小组活动,让学生在团队中合作解决问题,培养团队合作和沟通能力。
4. 课堂练习:布置课后作业和练习题,加强对知识的巩固和运用能力。
五、考核方式1. 平时表现(20%):包括课堂参与、作业完成情况等。
2. 实验报告(30%):根据实验要求撰写实验报告并提交。
3. 期中考试(20%):考察对课程内容的理解和掌握程度。
4. 期末考试(30%):综合考察整个课程的学习成果。
六、参考教材1. 赵凤岐,机械动力学,高等教育出版社,2015年。
2. 谢振波,机械力学基础,清华大学出版社,2013年。
七、参考网址无。
八、备注本课程的教学大纲可根据实际教学需求进行调整和补充,以确保教学内容的连贯性和可操作性。
机械动力学分析

机械动力学分析机械动力学是研究物体受到外力作用时的运动规律和力学性质的学科。
它对于机械设计和工程分析非常重要。
本文将对机械动力学的基本概念、分析方法和实际应用进行详细探讨。
第一部分:机械动力学基础1.运动和力学运动是物体的位置随时间变化的过程。
力学是研究物体运动和力之间关系的学科。
在机械动力学中,重要的概念包括位移、速度、加速度和质量等。
2.牛顿定律牛顿定律是机械动力学的基石。
根据牛顿定律,物体受到的合力等于物体质量乘以加速度。
这个定律适用于解决物体在恒力作用下的运动问题。
3.动力学原理动力学原理描述了物体在受到外力作用时的运动规律。
其中,动量守恒原理和能量守恒原理是常用的分析工具。
动量守恒原理指出,在没有外力作用的情况下,物体的动量保持不变。
能量守恒原理指出,在封闭系统中,能量的总量保持不变。
第二部分:机械动力学分析方法1.静力学分析静力学是机械动力学的基础。
它研究物体在平衡状态下的受力和受力转矩。
静力学分析常使用受力图和受力平衡方程来求解。
2.运动学分析运动学研究物体的运动状态,包括位置、速度和加速度等。
运动学分析常使用位移、速度和加速度的关系式进行计算。
3.动力学分析动力学分析研究物体在受力作用下的运动规律。
它涉及物体的质量、力、加速度和位移等参数的计算。
常见的动力学分析方法包括牛顿第二定律、动量守恒和能量守恒的应用。
第三部分:机械动力学的实际应用1.机械设计机械动力学分析在机械设计中起着重要的作用。
通过对机械系统的动力学分析,可以评估机械的工作性能和可靠性,优化设计方案,减少能量消耗和材料使用等。
2.工程分析机械动力学分析在工程领域中广泛应用。
例如,在桥梁设计中,需要对桥梁受力和振动进行动力学分析,以保证结构的安全性和可靠性。
在汽车工程中,需要对汽车的运动性能和悬挂系统进行动力学分析,以提高驾驶舒适性和行驶稳定性。
3.故障诊断与维修机械动力学分析可以用于故障诊断和设备维修。
通过对受损机械的动力学分析,可以确定故障原因,并采取相应的维修措施。
第7章机械动力学
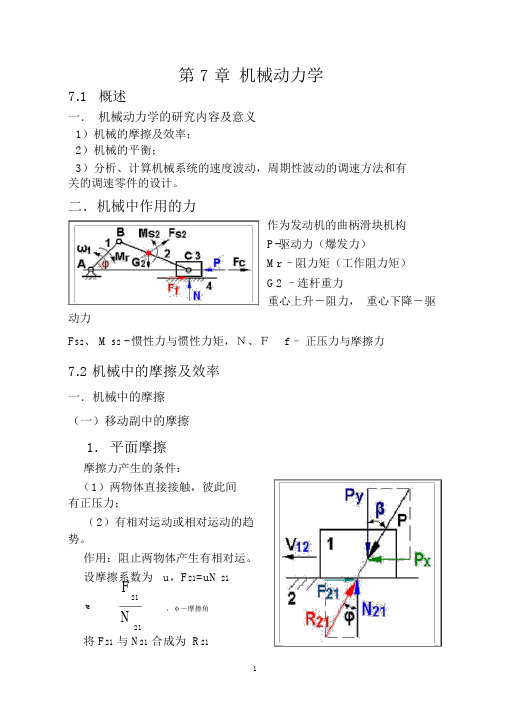
第 7 章机械动力学7.1概述一.机械动力学的研究内容及意义1)机械的摩擦及效率;2)机械的平衡;3)分析、计算机械系统的速度波动,周期性波动的调速方法和有关的调速零件的设计。
二.机械中作用的力作为发动机的曲柄滑块机构P-驱动力(爆发力)Mr –阻力矩(工作阻力矩)G2 –连杆重力重心上升-阻力,重心下降-驱动力F S2、 M S2 - 惯性力与惯性力矩,N、F f –正压力与摩擦力7.2 机械中的摩擦及效率一.机械中的摩擦(一)移动副中的摩擦1.平面摩擦摩擦力产生的条件:(1)两物体直接接触,彼此间有正压力;(2)有相对运动或相对运动的趋势。
作用:阻止两物体产生有相对运。
设摩擦系数为u,F21=uN 21F21tg,φ-摩擦角N21将 F21与 N21合成为 R21R21-总反力(全反力)P X P分解为 P和 P ,tgX Y P Y( P X P sin、 P Y P cos )F21P X,有F21tgY 方向平衡: Py=N 21,即:tg tg P Xtg讨论:①总反力 R21恒与相对速度V 12成 90° +φ②当β >φ, P X > F21,滑块作加速运动;当β =φ, P X = F21,动则恒动,静则恒静;当β <φ, P X < F21,原来运动,作减速运动,原来静止,永远静止,称自锁。
③ 自锁条件:β≤φβ=φ,条件自锁(静止);β<φ,无条件自锁。
2.斜面摩擦斜面机构如图,滑块置于升角α的斜面上,摩擦角为φ,作用于滑块上的铅垂力为Q,求滑块等速上升和下降时所需水平平衡力P 和 P’。
(1)求等速上升水平平衡力 PP-驱动力, Q-阻力PQ R 21 0 ,tg ()P,P Qtg () (1)Q( 2)求等速下降水平平衡力 P ’Q -驱动力, P ’-阻力P'Q R 21 0 ,tg () P ',P 'Qtg () (2)Q讨论:① 欲求下滑 (反行程) P ’,只需将式 ( 1)中 P →P ’,φ→ (-φ )② 下滑时,当α >φ, P ’为平衡力α <φ, P ’为负,成为驱动力的一部分,该条件下,若无 P ’,则无论 Q 多大,滑块不下滑,称自锁,自锁条件:α≤φ。
机械动力学

机械动力学Copyright @ 2009 HRBEU 702All Rights Reserved绪论一、机械动力学性质1.机械:机构、机器的总称。
(机械原理)2.动力学:研究刚体运动及受力关系的学科。
动力学正问题—已知力(力矩)求运动;动力学反(逆)问题—已知运动求力(力矩)。
机械动力学:是研究机械在力作用下的运动、机械在运动中产生的力(力矩)的科学。
F ma=例:机构组成性质:曲柄、急回。
若已知力(力矩),当机构处于平衡状态时,求力矩(力)--机械静力学问题。
若已知M、F,求ω、v 时—机械动力学。
ωM Fv二、机械动力学研究内容1. 描述机械有那些基本参数1)机构参数:几何参数(杆长);物理参数(质量m,转动惯量J)。
2)运动参数:转角θ、ω、α、s、v、a。
3)力矩M、力F。
2. 内容1)已知机械的物理、几何参数进行动力学分析。
a、已知力求运动;b、已知力求运动。
可表示为:2)已知运动、受力求结构这是机械设计研究问题,一般实际做法是先设计后校核,少数情况是直接求设计参数。
例:(,)(,,,,,,)f F Mg l m J v a ωαZZ X YZ Z q求支点最佳位置。
如果梁静止为静力学问题;如果梁有惯性运动为动力学问题。
3)具体章节内容单自由度运动学方程的建立二自由度运动学方程的建立,如差动轮系、五杆机构多自由度运动学方程的建立,如机械手臂、机器人等理想情况下(无摩擦变形等)考虑摩擦,如铰链、关节处摩擦考虑弹性变形,如杆变形、并联柔性机器人变质量问题,如推土机工作过程、火箭发射过程有间隙情况下动力学研究,不详讲述三、研究对象--以机械为研究对象三大典型机构连杆机构凸轮机构齿轮机构组合机构四、其它1.学习机械动力学目的、意义学习动力学分析问题的思想和基本方法,能够解决一般动力学问题。
2.教材(见前言)3.考核方式开卷。
§1-1 利用动态静力法进行动力学分析一、思路动静法:根据达朗贝尔原理将惯性力计入静力平衡方程,求出为平衡静载荷和动载荷而需在原动件上施加的力(力矩)。
机械动力学动力分析原理

机械动力学动力分析原理机械动力学是力学的一个重要分支,研究机械系统在外力作用下的运动规律。
在机械系统的设计、制造和优化过程中,动力分析起着重要的作用。
动力分析主要是指通过计算和分析力学参数,来研究机械系统的运动学特性、力学特性和动力学特性。
本文将介绍机械动力学动力分析的基本原理。
一、动力学基本概念在进行机械动力学动力分析之前,我们首先要了解一些基本概念。
1. 动力学:研究物体的运动是如何受到力的作用而改变状态的学科。
2. 动力学分析:通过对机械系统的力学参数进行计算和分析,以研究机械系统的运动规律和力学特性。
3. 动力:物体改变其状态所受到的力。
4. 动力学平衡:在机械系统中,当物体的运动状态不发生变化时,称为动力学平衡。
5. 力矩:力在力臂上的作用产生的力矩。
6. 动力矩:力矩与角速度的乘积,反映了物体绕固定轴旋转的难易程度。
二、动力分析的原理机械动力学动力分析的原理主要基于牛顿第二定律和动量定理。
1. 牛顿第二定律牛顿第二定律是机械动力学的基础,表明物体的加速度与作用力成正比,与物体的质量成反比。
在直线运动中,牛顿第二定律可以表达为F=ma,其中F是物体所受的合外力,m是物体的质量,a是物体的加速度。
在旋转运动中,牛顿第二定律可以表达为τ=Iα,其中τ是物体所受的合外力矩,I是物体的转动惯量,α是物体的角加速度。
2. 动量定理动量定理表明,当物体所受的合外力矩为零时,物体的角动量守恒。
动量定理可以表达为Στ=0,其中Στ是物体所受的合外力矩。
三、动力分析的应用机械动力学动力分析的应用非常广泛,涉及到各种机械系统的设计和优化。
1. 运动学分析通过对机械系统的运动学参数进行计算和分析,可以了解机械系统的运动规律和运动状态。
例如,可以计算机械系统的速度、加速度和位移等参数。
2. 力学分析通过对机械系统的力学参数进行计算和分析,可以了解机械系统所受的各种力和力矩的大小和方向,从而为机械系统的设计提供依据。
机械动力学
机械动力学
机械动力学是一种力学分支,用来研究物体的运动规律。
机械力学的基本原理是,物体受力时要考虑它的动量、势能和力学运动状态。
机械力学研究物体受力后,如何协调运动以实现力学系统的最终目标。
机械动力学的基本方程是力学平衡方程,它描述了物体在力学运动中,受力的情况下,动能、势能和运动状态变化的情况。
力学平衡方程主要由三个部分组成:力学定制、力学规律和力学流形。
力学定制是机械动力学的基本原理,它涉及物体的力学变化,包括物体的运动状态、势能和动能。
力学定制可以用来计算物体受力时,各变量的变化速率。
力学规律是机械动力学的第二个基本原理,它涉及物体在力学运动中受力所产生的力学变化。
力学规律具体表示为:物体受力时,质量、动量、势能和动能会发生变化。
力学流形是机械动力学的第三个基本原理,它涉及物体在力学运动中受力的情况下,力学参数的变化。
力学流形是由力学规律的积累,它可以提供物体在各种力学变化状态下的精确的运动状态。
机械动力学是一种比较复杂的力学,研究不仅仅限于物体受力时的运动状态,还可以涉及力学设计与分析、力学模拟、力学断裂以及力学仿真等方面。
它可以帮助科学家们深入了解物体运动规律,为人们在有限工作环境中分析残缺机械参数提供技术支持,实现更加省力、精确且有效的力学分析。
在当今社会,机械动力学已成为一门重要的科学,广泛应用于工
程设计、航天技术、发动机技术、精密仪器等领域。
未来,机械动力学将继续发挥重要作用,在复杂的工程设计及技术开发过程中,与其他科学形成有机结合,以实现精确、有效的力学应用。
机械工程中的机械动力学分析

机械工程中的机械动力学分析机械动力学是机械工程中的一门重要课程,它主要研究机械系统的运动规律、力学特性和动力学特性等问题。
从广义上讲,机械动力学可以分为静力学和动力学两部分,其中静力学研究机械系统在静止状态下的受力情况和平衡条件,而动力学则研究机械系统在运动状态下的运动规律和动力学特性。
本文将针对机械动力学中的动力学部分进行分析和讨论。
一、机械系统的运动规律机械系统的运动规律可以通过牛顿第二定律和角动量定理来描述。
牛顿第二定律表明,机械系统受到的合外力等于其质量乘以加速度,即F=ma。
对于刚性物体,牛顿第二定律可以表示为:ΣF=ma其中ΣF表示作用在物体上的合力,m表示物体的质量,a表示物体的加速度。
在运用牛顿第二定律求解机械系统运动规律时,需要根据实际情况选择适当的坐标系,并建立相应的运动方程。
角动量定理则是描述旋转运动的重要定律。
对于刚性物体的旋转运动,它的角动量可以通过以下公式来计算:L=Iω其中,L表示角动量,I表示物体的转动惯量,ω表示角速度。
根据角动量定理,系统中的合外力矩等于角动量的导数,即M=dL/dt通过角动量定理可以求解物体在旋转运动中的角加速度和角速度等参数。
二、力学特性的分析在机械动力学中,机械系统的力学特性包括弹性变形、破坏和能耗等方面。
弹性变形是机械系统在受到外力作用时,发生一定程度的形变而能够恢复原状的特性。
破坏是机械系统在受到过大的外力作用时,无法再恢复原状的特性。
能耗则是机械系统在运动或变形过程中所消耗的能量。
机械系统的弹性变形特性可以采用胡克定律来描述。
根据胡克定律,弹性形变发生时的应变与应力成线性关系。
对于一维弹性形变的情况,胡克定律可表示为:σ=Eε其中,σ表示应力,E表示弹性模量,ε表示应变。
胡克定律可以用来计算机械系统的弹性变形量。
机械系统的破坏特性可以采用强度学说来描述。
强度学说认为,在机械系统被外力破坏之前,其受到的最大应力应小于其材料的屈服强度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
将切于半径为0r的摩擦圆的约束
反力Rij向转动副中心简化,得到大小和 方向与Rij相同的总反力Rij和一个摩擦力
偶矩0rRij,其方向与ij方向相同。
Ryij
j
Mf
待求力的分量形式 0r(Rix) j 2(Riyj)2
Rij i Rij
Rij i Rxij
11
移动副中的摩擦力
0 (Rixj)2(Riyj)2
y
1 M1 A
S1 1 O
1
2
S2
2v2
B
S3 3
v3
x F3
1 Me Je 1
B
O
等效构件
1 Me Je O 1
26
定义 等效转动惯量(Equivalent moment of inertia)—等效构 件具有的转动惯量,其动能等于原机械系统所有构件动能之 和。 等效力矩(Equivalent moment of force)—作用在等效构 件上的力矩,其瞬时功率等于作用在原机械系统上所有外力 在同一瞬时的功率之和。 具有等效转动惯量,其上作用有等效力矩的等效构件称 为等效动力学模型。
惯性力的大小为
F i m i x S 2 i yS 2im iaSi
惯性力矩的的大小为 Mi JSii
5
二、机构动态静力分析的解析法 机构动态静力分析的任务 已知机构中各构件的重力、惯性力和给定的工作阻力及 各构件的运动参数,求出各运动副中的约束反力和原动件上 所需的驱动力或驱动力矩(也称为机构的平衡力或平衡力 矩)。 方法 矢量方程解析法 基本杆组法 直角坐标法等
13
第二节 机械的平衡
机械平衡的目的 机械平衡的内容
一、转子的平衡 转子的平衡包括刚性转子的平衡(Balancing of rigid rotor)和挠性转子的平衡(Balancing of flexible rotor)。 (一)刚性转子的平衡计算 ● 刚性转子的静平衡(Static balance)
dWNdt (M1 1 F3v3cos3)dt (M1 1F3v3)dt
运动方程
d J 1 2 ( 1 2 J S 2 22 2 m 2 2 v S 2 2 m 2 3 v 3 2 ) (M 11 F 3 v 3 )d t
24
选曲柄1为等效构件,曲柄转角1为独立的广义坐标,改
写公式
d 2 1 2 [ { J 1 J S 2 (1 2 ) 2 m 2 ( v S 1 2 ) 2 m 3 (v 3 1 ) 2 ] }1 [ M 1 F 3 (v 3 1 )d t ]
具有转动惯量的量纲 Je
具有力矩的量纲 Me
d[Je 212]Me1dt
定义
Je 等效转动惯量,JeJe(1) Me 等效力矩, Me Me(1,1,t)
25
结论 对一个单自由度机械系统(曲柄滑块机构)的研究,可以
简化为对一个具有等效转动惯量Je(1),在其上作用有等效 力矩Me (1,1,t)的假想构件的运动的研究。
刚性转子的静平衡计算
● 刚性转子的动平衡(Dynamic balance )
刚性转子的动平衡计算
14
(二)刚性转子的平衡实验 1. 刚性转子的静平衡实验
OOO OO
S S S
SS
Q Q Q
OOO OO
S SS
S
S
Q
QQQ
Q
导导轨轨式式静平平衡衡架架
15
滚子式平衡架
Q QQ
单摆式平衡架
16
6
直角坐标法的主要步骤
● 建立一平面直角坐标系,将各构件上所有的已知力,向 各 自 的 质 心 简 化 为 一 个 通 过 质 心 的 合 力 (Combined force)和一个合力偶(Combined couple of forces),并将 该合力用平行于坐标轴的两个分量表示。
● 将运动副中的所有待求约束反力用平行于坐标轴的两个 分量表示。
间的关系式,即机应等于作用于该系 统所有各外力的元功W。
微分形式
dEdW
机械运动方程的一般表达式
22
研究对象的简化 对于单自由度机械系统,只要知道其中一个构件的运动 规律,其余所有构件的运动规律就可随之求得。因此,可以 把复杂的机械系统简化成一个构件,即等效构件(Equivalent link) , 建 立 最 简 单 的 等 效 动 力 学 模 型 (Dynamically equivalent model)。
研究内容 在外力作用下机械的真实运动规律及机械速 度波动的调节。
研究目的 使机械的转速在允许范围内波动,保证机械 正常工作。
机械主轴速度产生波动的原因 机械的输入功与有用功 和有害功之和不能时时保证相等。
机械速度波动类型 周期性速度波动(Periodic speed fluctuation) 非周期性速度波动(Aperiodic speed fluctuation)
4
E
LAB 80mm,LBC 260mm,
LCD 300mm,LDE 400mm,
LEF 460mm。
1 40rads,逆时针转动
各构件质量
B
S3
C 2
S2
2
m1 3.6kg,
1 1
3
m2 6kg, m3 7.2kg, m4 8.5kg,
90mm
A
1
S1 D
3
m5 8.5kg。
4 S4
第六章 机械动力学
假定原动件匀速运动进行分析的局限性 分析结果与真实情况有差异,对于高速、重载、大质量 的机械,这种分析误差可能直接影响到设计的安全性和可靠 性。 实际工况 作用在机器执行构件的生产阻力形式是各种各样的,绝 大多数机器受到的生产阻力是变化的(时大时小,时有时无, 突然加载,毫无规律等),作用在构件上的摩擦力和摩擦力 矩随着机器的运转也在不断变化。因此,绝大多数机械系统 运转时,其主轴(Main shaft)的速度是波动的。
1
有害影响 主轴速度过大的波动变化会影响机器的正常工作,增大
运动副中的动载荷,加剧运动副的磨损,降低机器的工作精 度和传动效率,缩短机器的使用寿命。周期性的速度波动还 会激发机器振动,产生噪声,甚至引起机器共振,造成意外 事故。
造成系统主轴周期性波动的重要原因 高速、重载的机械系统中,构件周期性运动的惯性力 (Inertia force)和惯性力矩(Inertia torque) 。
4
一、构件惯性力的确定
用力学方法确定机构的惯性力
用解析法对机构进行动态静力分析时,常采用分量的形
式表示惯性力。施加在构件i上的惯性力Fi在x、y方向上的分
量为
Fi x mi xSi
Fi y
mi
ySi
惯性力的方向用惯性力在坐标系中的方位角i表示为
i arc tm m aiix yn S Siiarc tx y a S Siin
● 以每一个构件为受力分析单元,建立单元力平衡方程 式,并将其表示成单元力平衡矩阵方程。
● 根据约束力与约束反力大小相等、方向相反的原则,最 后将各单元力平衡矩阵方程 “组装”成机构力平衡矩阵 方程,用计算机求解。
机构动态静力分析力平衡矩阵方程的建立
7
机构动态静力分析方程组的表示 设已知力列阵为{F},待求力列阵为{R},待求力系数矩 阵为[A],机构动态静力分析方程组可以统一表示为
-1.0
FAy -2.0
-3.0
Mb
FAx
-4.0
10
三、机构动态静力分析的图解法
机构动态静力分析的图解法
ij
四、考虑运动副摩擦的受力分析
0rRij
力平衡方程的待求力部分包括运动副
中的摩擦力。摩擦力与作用在运动副中的 约束反力和运动副元素间的当量摩擦系数 j
0有关,可以把摩擦力和摩擦力矩表示为
约束反力的函数。
12
应用逼近法对方程组进行求解的步骤
⑴ 令00,求出理想机械中的运动副反力。
⑵ 根据求出的约束反力计算运动副中的摩擦力和摩擦 力矩,将其作为已知力加在相应的构件上重新进行受力分 析,计算运动副中的约束反力。相邻两次计算出的约束反力 误差满足分析精度要求,则以最后一次计算结果作为力分析 的最终结果,否则重复上述过程,直到满足分析精度要求为 止。
(一)平面机构惯性力的完全平衡 实现平面机构惯性力的完全平衡,需使机构的质心保持 静止不动。
平面机构惯性力的完全平衡
(二)平面机构惯性力的部分平衡
平面机构惯性力的部分平衡
17
第三节 机械的运转及其速度波动的调节
一、概述
机械系统的运动规律,是由各构件的质量(Mass)、转动 惯量(Moment of inertia)和作用于各构件上的力等多方面因 素决定的。
节(Speed fluctuation regulation)
3
第一节 机构的动态静力分析
主要目的 ⑴ 确定运动副中的约束反力。 ⑵ 确定在按给定的运动规律条件下需要加在原动件上 的平衡力(Balance force)或平衡力矩(Trimming moment)。 方法 对于低速机械,可以在不计惯性力的条件下对机构进行 受力分析,即静力分析(Statical analysis)。 对于中、高速机械,可以根据达朗贝尔原理将构件运动 时产生的惯性力作为已知外力加在相应的构件上,将动态受 力系统转化为瞬时静力平衡系统,用静力学的方法对机构进 行受力分析,即动态静力分析。
设滑块相对于导轨的的速度vji的方向与x轴正向的夹角为
,约束反力Rij产生的摩擦力在x方向和y方向的分量分别为
0cos(Rixj)2(Riyj)2 和 0s in(Rixj)2(Riyj)2
含有摩擦力和摩擦力偶矩的非线性方程组方程组中的待 求机构约束反力项