自动控制原理实验用Matlab软件编制劳斯判据程序并解题(《学习辅导》例4.3.5)
自动控制原理实验用Matlab软件编制劳斯判据程序并解题(【学习辅导】例4.3.5)
上海电力学院实验报告自动控制原理实验课程题目:用Matlab软件编制劳斯判据程序并解题(《学习辅导》例4.3.5) 班级:姓名:学号:时间:2012年11月4日自动化工程学院自动化(电站自动化)专业实验报告目录一、问题描述 (3)二、理论方法分析 (3)三、实验设计与实现 (3)四、实验结果与分析 (5)五、结论与讨论 (6)六、实验心得体会 (6)七、参考文献 (7)八附录 (7)一、问题描述用MATLAB编制劳斯判据列出其劳斯矩阵并判断相对应系统的稳定性二、理论方法分析采用M文件实现Matlab编程。
1) M文件的建立与调用➢从Matlab操作桌面的“File”菜单中选择“New”菜单项,再选择“M-file”命令,屏幕将出现Matlab文本编辑器的窗口。
➢在Matlab命令窗口的“File”菜单中选择“Open”命令,则屏幕出现“Open”对话框,在文件名对话框中选中所需打开的M文件名。
2) M文件的调试在文件编辑器窗口菜单栏和工具栏的下面有三个区域,右侧的大区域是程序窗口,用于编写程序;最左面区域显示的是行号,每行都有数字,包括空行,行号是自动出现的,随着命令行的增加而增加;在行号和程序窗口之间的区域上有一些小横线,这些横线只有在可执行行上才有,而空行、注释行、函数定义行等非执行行的前面都没有。
在进行程序调试时,可以直接在这些程序上点击鼠标以设置或去掉断点。
三、实验设计与实现(1)程序%RouthMatrix**劳斯矩阵(带参数的特征多项式)并判断对应系统稳定性** clear;syms k z q %定义变量k z qp=input('请输入特征多项式的参数='); %提示输入参数n=length(p); %得到p的长度for i=0:ceil(n/2)-1 %将多项式进行劳斯矩阵排序a(1,i+1)=p(2*i+1);if 2*(i+1)>na(2,i+1)=0;breakenda(2,i+1)=p(2*(i+1));endfor k=3:n %计算从第三行开始劳斯矩阵内容for j=1:ceil((n-k+1)/2)if a(k-1,1)==0 %判断是否有共轭虚根disp('系统有共轭虚根')breaksign=1;breakenda(k,j)=(a(k-1,1)*a(k-2,j+1)-a(k-1,j+1)*a(k-2,1))/a(k-1,1);endenddisp('劳斯矩阵') %输出对应的劳斯矩阵disp(double(a))for i=3:k %用劳斯判据判断系统的稳定性if a(i-1,1)<=0 %判断第一列元素是否不大于0 q=1;breakendendif q==1disp('系统不稳定')elsedisp('系统稳定') %输出系统稳定性判定结果end(2)设计劳斯表的内容根据书上的原理进行设计,将多项式进行劳斯矩阵排序,可得其前两行的内容,余下几行则要根据书上原理写出。
Matlab在《自动控制原理》教学课件中的应用
Matlab在《自动控制原理》教学课件中的应用[摘要] 科技的高速发展促使职业教育必须加快其改革的步伐,基于实际自动控制系统的特点,在教学课件中引入控制工程实例,将目前控制系统分析与设计中常用的MATLAB数字仿真技术应用于《自动控制原理》的多媒体课堂教学当中。
从而开发能激发学生兴趣,提高教学效率的多媒体课件,达到创新教育和素质教育的目标。
[关键词] 自动控制原理MATLAB多媒体课件一、《自动控制原理》课程的教学现状《自动控制原理》是电气专业的一门专业基础课,它是以工程数学、电子技术以及多门电学专业课为基础,讲述自动控制系统的基本概念、建立控制系统数学模型、分析系统性能、进行系统设计的基础理论和相关技术。
在实际教学中,这门课上课的老师和学生都觉得效果不好,学完之后,学生抓不住重点,甚至有些学生很讨厌这门课。
主要原因有以下几个方面:1、内容多,学时少2、教学模式单一,课堂教学枯燥,没有生机3、虽然许多教师制作了《自动控制原理》课程的课件,多媒体的授课方式逐步取代了传统的教学方式,但是,限于课件制作时间较短,部分教师制作的多媒体课件仅仅是把讲义从黑板搬到了屏幕上,没有发挥多媒体生动直观的优势。
二、Matlab在自动控制原理课程中的应用Matlab是一种专业的计算机程序,用于数值计算、符号运算及图形处理。
从教学方面来说,优秀的仿真软件有助于提高学生的学习兴趣,有效地扩充教学信息,增加吸引力,使教学更加生动、形象。
这对于高职院校的学生来说显得尤为重要。
Matlab工具箱分为两大类:功能性工具箱和学科性工具箱。
其中Simulink是一个模块化的系统动态仿真环境,是Matlab的重要组成部分,并且使用方便,只需要用鼠标拖动的方法,就能很快地建立系统的框图模型,并可选择仿真参数和数值算法、启动仿真程序对该系统进行仿真、设置不同的输出方式来观察仿真结果。
在仿真过程中可以随意改变参数,实时观测系统的变化,交互性好。
MATLAB仿真软件在《自动控制原理》教学中的应用与实践
MATLAB 仿真软件在《自动控制原理》教学中的应用与实践*高联学(滨州学院电气工程学院,山东 滨州 256600)摘 要:运用MATLAB 仿真软件进行《自动控制原理》教学,能让学生直观、动态地观察参数的变化对实验结果的影响,加深对课堂知识的理解,突破时间和空间的限制,体现以学生为中心的理念,注重学生的过程性考核和实践动手能力的提高,具有很强的实用性。
关键词:MATLAB 仿真软件;《自动控制原理》;应用;实践中图分类号:G642;TP13-4 文献标志码:A 文章编号:1672-3872(2019)10-0008-02——————————————基金项目: 滨州学院实验技术研究项目(BZXYSYXM201416)作者简介: 高联学(1978—),男,山东滨州人,硕士,副教授,研究方向:电力电子与电力传动。
《自动控制原理》是控制科学与工程一级学科的核心课程,也是电子信息类专业的重要基础课。
该课程的知识涵盖物理、化学、生物、电子、机械等方面,讲授的基本原理比较抽象,学生不容易理解和掌握,大多数学生听完课后对课堂上教师讲授的内容印象不深,甚至有个别学生一开始听不懂,往后就干脆不听了,长此以往,对学生的发展非常不利。
即使学生到实验室做实验,由于实验内容陈旧,形式单一,主要是实验箱式的验证性实验,很难提高学生的理解能力和动手能力。
将MATLAB 仿真软件运用到《自动控制原理》理论教学和实验教学中,是理论联系实际的重要手段,能加深学生对所学理论的理解,帮助其发现在课堂上所学知识的不足之处,并及时改进,增强学生对《自动控制原理》课程的学习积极性和主动性。
1 《自动控制原理》课程教学中存在的问题《自动控制原理》的主要内容有自动控制系统概述、控制系统的数学模型、控制系统的时域分析法、根轨迹法、控制系统的频率域分析法、控制系统的校正、非线性系统分析、离散控制系统等,实验包括典型环节的电路模拟、二阶系统的瞬态响应、高阶系统的瞬态响应和稳定性分析、线性定常系统的稳态误差、典型环节和系统频率特性的测量、线性定常系统的串联校正、典型非线性环节的静态特性、非线性系统的描述函数法、非线性系统的相平面分析法、采样控制系统的分析、采样控制系统的动态校正等内容。
(最新版)自动控制原理MATLAB仿真实验报告
实验一 MATLAB及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、;其中可以为连续系统,也可为离散系统。
2、;表示时间范围0---Tn。
3、;表示时间范围向量T指定。
4、;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:其拉氏变换为:所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:①;②③(二)分析系统稳定性有以下三种方法:1、利用pzmap绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den) 运行结果: p =-1.7680 + 1.2673i -1.7680 - 1.2673i 0.4176 + 1.1130i 0.4176 - 1.1130i -0.2991P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理 matlab实验报告
自动控制原理实验(二)一、实验名称:基于MATLAB的控制系统频域及根轨迹分析二、实验目的:(1)、了解频率特性的测试原理及方法;(2)、理解如何用MATLAB对根轨迹和频率特性进行仿真和分析;(3)、掌握控制系统的根轨迹和频率特性两大分析和设计方法。
三、实验要求:(1)、观察给定传递函数的根轨迹图和频率特性曲线;(2)、分析同一传递函数形式,当K值不同时,系统闭环极点和单位阶跃响应的变化情况;(3)、K值的大小对系统的稳定性和稳态误差的影响;(4)、分析增加系统开环零点或极点对系统的根轨迹和性能的影响。
四、实验内容及步骤(1)、实验指导书:实验四(1)、“rlocus”命令来计算及绘制根轨迹。
会出根轨迹后,可以交互地使用“rlocfind”命令来确定点击鼠标所选择的根轨迹上任意点所对应的K值,K值所对应的所有闭环极点值也可以使用形如“[K, PCL] = rlocfind(G1)”命令来显示。
(2)、波特图:bode(G1, omga)另外,bode图还可以通过下列指令得出相位和裕角:[mag,phase,w] = bode(sys)(3)、奈奎斯特图:nuquist(G, omega)(2)课本:例4-1、4-2、4-7五实验报告要求(1)、实验指导书:实验四思考题请绘制下述传递函数的bode图和nyquist图。
1. 根据实验所测数据分别作出相应的幅频和相频特性曲线;2. 将思考题的解题过程(含源程序)写在实验报告中。
幅频特性曲线相频特性曲线Gs = zpk([10], [-5; -16; 9], 200)subplot(1, 2, 1)bode(Gs)gridsubplot(1, 2, 2)nyquist(Gs)grid(2)课本:例4-1、4-2、4-7图像结果:程序:Gs = zpk([-1], [0; -2; -3],1) rlocus(Gs)图像结果:程序:Gs = zpk([-2], [-1-j; -1+j],1) rlocus(Gs)程序:K=[0.5 1 2]for i=1:1:3num=[1,1,0,0]; den=[1,1,K(i)]; sys=tf(num,den); rlocus(sys); hold ongrid onend图像结果:目标:改变增益K和转折频率依次调节源程序:k1=[4.44,10,20];num=[1,2];den=conv([1,1],[1,2,4]);%一阶转折频率 1/T(wn1=2,wn2=1)二阶转折频率 wn3=wn'=2,伊布西塔=1/2 num1=[1,1];den1=conv([1,2],[1,2,4]);%一阶转折频率 1/T(wn1=1,wn2=2)二阶转折频率 wn3=wn'=2,伊布西塔=1/2 t=[0:0.1:7]; %for i=1:3g0=tf(k1(i)*num,den);g=feedback(g0,1);[y,x]=step(g,t);c(:,i)=y;g1=tf(k1(i)*num1,den1);g(1)=feedback(g1,1);[y1,x]=step(g(1),t);c1(:,i)=y1;endplot(t,c(:,1),'-',t,c(:,2),'-',t,c(:,3),'-',t,c1(:,1),'-',t,c1(:,2), '-',t,c1(:,3),'-');gridxlabel('Time/sec'),ylabel('out')结果分析:在本题中(1)改变k值:k值越大,超调量越大,调节时间越长,峰值时间越短,稳态误差越小(2)改变转折频率:超调量,调节时间,峰值时间,稳态误差同样有相应的变化。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
MATLAB自动控制原理实验
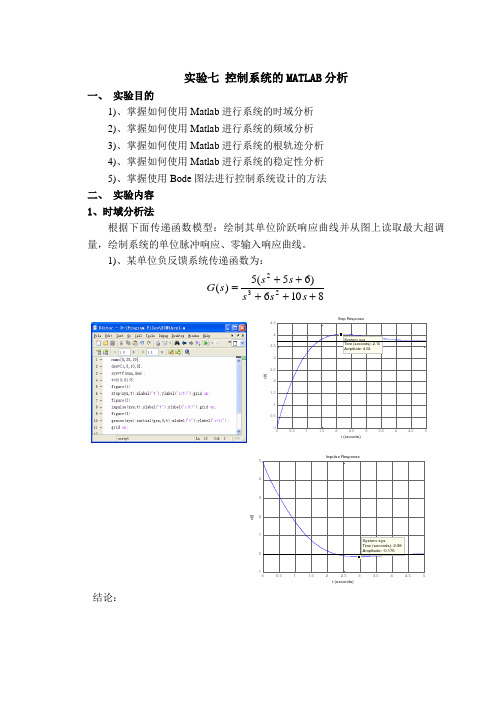
实验七 控制系统的MATLAB 分析一、 实验目的1)、掌握如何使用Matlab 进行系统的时域分析 2)、掌握如何使用Matlab 进行系统的频域分析 3)、掌握如何使用Matlab 进行系统的根轨迹分析 4)、掌握如何使用Matlab 进行系统的稳定性分析 5)、掌握使用Bode 图法进行控制系统设计的方法 二、 实验内容 1、时域分析法根据下面传递函数模型:绘制其单位阶跃响应曲线并从图上读取最大超调量,绘制系统的单位脉冲响应、零输入响应曲线。
1)、某单位负反馈系统传递函数为:8106)65(5)(232+++++=s s s s s s Gt (seconds)c (t )t (seconds)c (t )结论:2)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ζ=0.7,ωn 取2、4、6、8、10、12的单位阶跃响应。
Step ResponseTime (seconds)00.51 1.52 2.53 3.54结论:3)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ωn =6,ζ取0.2、0.4、0.6、0.8、1.0、1.5、2.0的单位阶跃响应。
Time (seconds)结论:2、频率分析法根据下面传递函数模型,绘制出系统的频率响应曲线,包括Bode 图和Nyquist 图,并从图上读取相角交接频率、截止频率,并求出幅值裕度和相角裕度。
1)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ζ=0.7,ωn 取2)、4)、6)、8、1)0、1)2)的伯德图和奈奎斯特图。
Wn=2M a g n i t u d e (d B )10101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/s) , Pm = 164 deg (at 0.4 rad/s)Frequency (rad/s)Real AxisI m a g i n a r y A x i sWn=4M a g n i t u d e (d B )10101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=6M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=8M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=10M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=12M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i s2)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ωn =6,ζ取0.2、0.4、0.6、0.8、1.0、1.5、2.0的伯德图和奈奎斯特图。
自动控制原理Matlab实验4(频域稳定分析)
《自动控制原理》课程实验报告实验名称频域稳定分析专业班级 ********************学号姓名**指导教师李离学院名称电气信息学院2013 年 3 月 20 日1.利用函数nyquist 和margin 分析系统的相对稳定性修改本实验所附程序lab4_1.m 并运行之,分析K=0.5,2,3.013,4和10时,开环传递函数为某单位负反馈闭环系统(如图1)的相对稳定性。
图(1) Lab4_1_1.m K=0.51.利用函数nyquist 分析如下: 程序:num=[0.5];den=[1 2 1 0.5]; sys=tf(num,den); nyquist(sys)仿真结果:G(s)R(s )Y(s)+_图(2)可将传递函数写成零极点形式)5217.02174.0)(5217.02174.0)(5625(5.0)(i s i s s s G -++++=开环传递函数在右半S 平面无极点即P=0,从图(2)可以看到nyquist 图包围(-1,j0)点0次,即N=0,由乃奎斯特稳定性判据可知闭环系统在右半S 平面的极点数Z=N+P=0 故系统稳定。
2.利用margin 函数分析如下: 程序:num=[0.5];den=[1 2 1 0.5]; sys=tf(num,den); margin(sys) 仿真结果:可得系统的相位裕量为Pm=-131°+180°=49°,幅值裕量Gm=9.55dB 对于最小相位系统幅值裕度与相角裕度大于零则系统稳定。
也可在伯德图上判断系统稳定性,对数幅频特性大于零所对应的想频特性穿越-180°线的情况为0==-+N N ,则N=0=2P =0。
根据乃奎斯特判据知闭环系统稳定。
Lab4_1_2.m K=21.利用函数nyquist 分析如下: 程序:num=[2];den=[1 2 1 0.5]; sys=tf(num,den); nyquist(sys)仿真结果:如上分析,开环传递函数在右半S平面无极点即P=0,从图(4)可得nyquist曲线顺时针包围(-1,j0)点2次,即N=2,由乃奎斯特稳定性判据可知闭环系统在右半S平面的极点数Z=N+P=2 系统不稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自动控制原理学习辅导》杨平、翁思义、王志萍编著。
——中国电力出版社
《自动控制原理实验与实践》杨平、余洁、冯照坤、翁思义编著。
——中国电力出版社
八、附录
%RouthMatrix**劳斯矩阵(带参数的特征多项式)并判断对应系统稳定性**
clear;
syms k z q %定义变量k z q
q=1;
break
end
end
ifq==1
disp('系统不稳定')
else
disp('系统稳定') %输出系统稳定性判定结果
end
(2)设计
劳斯表的内容根据书上的原理进行设计,将多项式进行劳斯矩阵排序,可得其前两行的内容,余下几行则要根据书上原理写出。判断其是否稳定根据第一列元素是否有符号上的变化进行,从第二行第一列的元素开始,若其大于零,则endfor循环,i加1,判断第三行第一列元素,以此类推,直到有一行第一列的元素小于或者等于0为止,给q赋值1,跳出循环,输出‘系统不稳定’,若判断到最后一行的元素也没有小于或者等于零的数值出现,则输出‘系统稳定’。
二、理论方法分析…………………………………………3
三、实验设计与实现………………………………………3
四、实验结果与分析………………………………………5
五、结论与讨论……………………………………………6
六、 实验心得体会…………………………………………6
七、 参考文献………………………………………………7
end
六、实验心得体会
实践是检验真理的唯一标准,死板的书本交给我们的是一板一眼的计算方法,而实践不仅是理论的践行者,而且反馈着理论学习的真实面目。不是第一次听说MATLAB,在自控原理课上老师也不止一次用它演示了一些程序,那时MATLAB就给我留下了一个功能十分强大,操作极为简便的好印象。之后的实验课自己动手操作,更觉其神奇,那只是按照老师所讲的步骤一步一步的操作。坦白说,看到这个题目的瞬间有些茫然,好在有题目可以参考,解读了书上给出的程序后自己慢慢摸索演练,终于用MATLAB做了一道完整的题目,真的感受到了这个软件的实用,自己这次实验接触到只是其功能模块的冰山一角,只是学到了一点点基本操作,仅仅是对这款软件有了初步了解,但是对于其更高深的东西还不熟悉,虽然在报告里用到的编程并不是全部所学,但我已经身临其境的感受到MATLAB的魅力。我不得不感叹,一个好的程序软件对学习自动控制原理帮助的巨大。良好的开始是成功的一半,在以后的学习中,把理论和实践相结合,让MATLAB更好的为学习自控原理服务。
p=input('请输入特征多项式的参数 ='); %提示输入参数
n=length(p); %得到p的长度
for i=0:ceil(n/2)-1 %将多项式进行劳斯矩阵排序
a(1,i+1)=p(2*i+1);
if 2*(i+1)>n
a(2,i+1)=0;
break
end
a(2,i+1)=p(2*(i+1));
breaksign=1;
break
end
a(k,j)=(a(k-1,1)*a(k-2,j+1)-a(k-1,j+1)*a(k-2,1))/a(k-1,1);
end
end
disp('劳斯矩阵') %输出对应的劳斯矩阵
disp(double(a))
for i=3:k %t;=0%判断第一列元素是否不大于0
三、实验设计与实现
(1)程序
%RouthMatrix**劳斯矩阵(带参数的特征多项式)并判断对应系统稳定性**
clear;
syms k z q %定义变量k z q
p=input('请输入特征多项式的参数 ='); %提示输入参数
n=length(p); %得到p的长度
for i=0:ceil(n/2)-1 %将多项式进行劳斯矩阵排序
在Matlab命令窗口的“File”菜单中选择“Open”命令,则屏幕出现“Open”对话框,在文件名对话框中选中所需打开的M文件名。
2)M文件的调试
在文件编辑器窗口菜单栏和工具栏的下面有三个区域,右侧的大区域是程序窗口,用于编写程序;最左面区域显示的是行号,每行都有数字,包括空行,行号是自动出现的,随着命令行的增加而增加;在行号和程序窗口之间的区域上有一些小横线,这些横线只有在可执行行上才有,而空行、注释行、函数定义行等非执行行的前面都没有。在进行程序调试时,可以直接在这些程序上点击鼠标以设置或去掉断点。
a(1,i+1)=p(2*i+1);
if 2*(i+1)>n
a(2,i+1)=0;
break
end
a(2,i+1)=p(2*(i+1));
end
for k=3:n %计算从第三行开始劳斯矩阵内容
for j=1:ceil((n-k+1)/2)
if a(k-1,1)==0%判断是否有共轭虚根
disp('系统有共轭虚根')
end
end
disp('劳斯矩阵') %输出对应的劳斯矩阵
disp(double(a))
for i=3:k %用劳斯判据判断系统的稳定性
if a(i-1,1)<=0%判断第一列元素是否不大于0
q=1;
break
end
end
ifq==1
disp('系统不稳定')
else
disp('系统稳定') %输出系统稳定性判定结果
end
for k=3:n %计算从第三行开始劳斯矩阵内容
for j=1:ceil((n-k+1)/2)
if a(k-1,1)==0%判断是否有共轭虚根
disp('系统有共轭虚根')
breaksign=1;
break
end
a(k,j)=(a(k-1,1)*a(k-2,j+1)-a(k-1,j+1)*a(k-2,1))/a(k-1,1);
上 海 电 力 学 院
实 验 报 告
自 动 控 制 原 理 实 验 课 程
题目:用Matlab软件编制劳斯判据程序并解题(《学习辅导》例4.3.5)
班级:
姓名:
学号:
时间:2012年11月4日
自动化工程学院自动化(电站自动化)专业
实 验 报 告 目 录
一、问题描述………………………………………………3
八 附录……………………………………………………7
一、问题描述
用MATLAB编制劳斯判据列出其劳斯矩阵并判断相对应系统的稳定性
二、理论方法分析
采用M文件实现Matlab编程。
1)M文件的建立与调用
从Matlab操作桌面的“File”菜单中选择“New”菜单项,再选择 “M-file”命令,屏幕将出现Matlab文本编辑器的窗口。
四、实验结果与分析
如图所示M文件代码:
编写好M文件之后,保存并运行,即可在MATLAB界面中进行调试。
随意选取特征方程式的系数,运行后结果:
五、结论与讨论
由上述实验过程可以看出,劳斯判据前两行是根据特征方程式的参数写出的,而后面几行则是根据前两行计算得出,运用劳斯判据我们可以判断其稳定性,若有全零行,有共轭虚根,若第一列元素符号有变化,系统一定不稳定。若有未知参数,亦可判断其取值范围。