导线及坐标反算计算程序2008
3.1.4第十一讲导线测量原理与方法 - 用Excel进行坐标反算
用Excel进行坐标反算
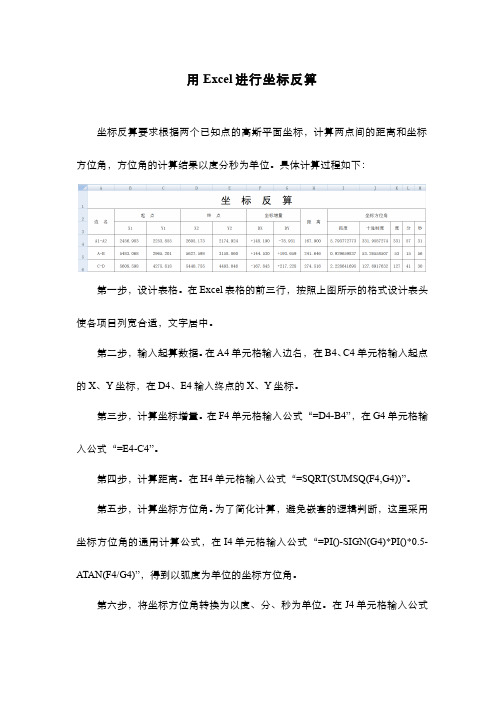
坐标反算要求根据两个已知点的高斯平面坐标,计算两点间的距离和坐标方位角,方位角的计算结果以度分秒为单位。
具体计算过程如下:
第一步,设计表格。
在Excel表格的前三行,按照上图所示的格式设计表头使各项目列宽合适,文字居中。
第二步,输入起算数据。
在A4单元格输入边名,在B4、C4单元格输入起点的X、Y坐标,在D4、E4输入终点的X、Y坐标。
第三步,计算坐标增量。
在F4单元格输入公式“=D4-B4”,在G4单元格输入公式“=E4-C4”。
第四步,计算距离。
在H4单元格输入公式“=SQRT(SUMSQ(F4,G4))”。
第五步,计算坐标方位角。
为了简化计算,避免嵌套的逻辑判断,这里采用坐标方位角的通用计算公式,在I4单元格输入公式“=PI()-SIGN(G4)*PI()*0.5-ATAN(F4/G4)”,得到以弧度为单位的坐标方位角。
第六步,将坐标方位角转换为以度、分、秒为单位。
在J4单元格输入公式
“=DEGREES(I4)”,先将坐标方位角的单位转换为十进制度,然后在K4单元格输入公式“=INT(J4)”,在L4单元格输入公式“=INT((J4-K4)*60)”,在M4单元格输入公式“=((J4-K4)*60-L4)*60”,分别计算出坐标方位角的度、分、秒值;
如果需要计算其他边的坐标方位角,只需要把第4行拷贝粘贴到下一行,修改边名和两个端点的坐标即可计算坐标方位角,不需要再次输入公式。
坐标正反算及附合导线测量的内业计算
坐标正反算及导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x、y。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律y图6-10 坐标增量计算则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
坐标正算与反算、施工与大地坐标换算程序(4800P)

Goto 1
算例:1点,X=10.000,Y=20.000
2点,X=500.000,Y=600.000
3点,X=700.000,Y=400.000
专业的3S站
DB子程序:V=V+1:B=Z[V]+T:Prog“A”:D=Z[V+N]:Prog“XY”
DEG子程序:P=Frac B*100:B=INTB+INTP/60+Frac P/36
三、 支导线的计算
支导线就是从一个已知点出发,既不符合到另一个已知点也不回到原来的点上。支导线没有检核条件,不易发现错误,过不宜采用。
X? 输入5点X坐标
Y? 输入5点Y坐标
S=218500 (1.2.3.4.5点围成的面积)
X? 输入6点X坐标
Y? 输入6点Y坐标
S=230500 (1.2.3.4.5.6点围成的面积)
.........
.........
Lbl 3:{XY}:X“X=”:Y“Y=”:A=(X-C)cos R+(Y-D) sin R:“A=” :Pause 0:B=(Y-D)cos R-(X-C) sin R:B“B=” ▲ Goto 0 △
Lbl 4:{AB}:A“A=”:B“B=”:X=C+A cos R-B sin R:“X=”:Pause 0:Y=D+A sin R+B cos R:Y“Y=” ▲ Goto 0 △
坐标正算与反算、施工与大地坐标换算程序(4800P)
Deg:Fix4:J=0:C“X=”:D“Y=”:R“R=“:
测绘技术之坐标反算与正算

5.3坐标反算坐标反算,就是根据直线两个端点的已知坐标,计算直线的边长和坐标方位角的工作。
如图5.3所示,若A、B为两已知点,其坐标分别为(XA,YA)和(XB,YB),根据三角函数,可以得出直线的边长和坐标方位角计算公式:tgα=△YAB/△XAB=(YB-YA)/(XB-XA)αAB =tg-1 (△YAB/△XAB)= tg-1 ((YB-YA)/(XB-XA))/td>DAB=△YAB/sin αAB=XAB/cos αAB 或 (5.6)DAB=√(△X2+△Y2)应当注意,按公式(5.5)用计算器计算时显示的反正切函数值在-90°~+90°之间,而坐标方位角范围是0°~360°,所以按(5.5)式反算方位角时,要根据ΔX、ΔY的正负符号确定直线AB 所在的象限,从而得出正确的坐标方位角。
如使用fx140等类型的计算器,可使用功能转换键 INV 和极坐标与直角坐标换算键P→R以及x←→y键直接计算求得方位角。
按键顺序为:ΔX INV R→P ΔY =显示D X←→y 显示α。
例5.2 已知B点坐标为(1536.86 ,837.54),A点坐标为(1429.55,772.73),求距离DBA和坐标方位角αBA。
解:先计算出坐标增量:ΔXBA=1429.55-1536.86=-107.31ΔYBA=772.73-837.54=-64.81直接用计算器计算:按-107.31 INV P→R -64.81 =显示125.36(距离DBA);按 x←→y 显示211°07′53″(坐标方位角αBA)。
5.2 坐标正算坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图5.3所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B 的坐标为:XB=XA+ΔXAB (5.1)YB=YA+ΔYAB (5.2)式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
附和导线和闭合导线的坐标的计算程序
附和导线和闭合导线的坐标计算1、源程序F1 A1L1 Defm 4N-2L2 N:A:B:Pol(C-A,D-B):W<0=>W=W+360?T=WL3 K=0=>M=T+180:E=C:F=D:GOTO 0: ≠>E:F:Pol(G-E,H-F):W<0=>W=W+360?M=WL4 Lbl 0:L=0:U=0:I=0:R=2:Z[1]=TL5 Lbl 1:{J}:Z[R]+360: ?R=N+1=>GOTO 2: ≠>R=R+1:GOTO 1L6 Lbl 2:P”JB”=(Z[N+1]-M) ?Q”JL”=40√N?R=2L7 Lb1 3:{S}:Z[N+R]=S:L=L+S?L8 Z[2N-1+R]=Rec(S,(Z[R]-P(R-1)/N)):U=U+VL9 Z[3N-2+R]=W:I=I+W:N=R=>GOT 4: ≠>R=R+1:GOTO 3L10 Lbl 4:P=U+C-E?Q=I+D-F?L11 G”1:M”=L/Pol(P,Q) ?R=2L12 Lbl 5:X”XI”=C+Z[2N-1+R]-PZ[N+R]/L?Y”YI”=D+Z[3N-2+R]-QZ[N+R]/L?L13 R=N=>GOTO 6: ≠>R=R+1:C=X:D=Y:GOTO 5L14 Lbl 6:”END”2、说明(1)、本程序可计算附和导线和闭合导线的坐标,计算的坐标系经过角度闭合差及坐标增量闭合差分配后的结果,能显示角度闭合差、增量闭合差及导线全长的相对精度;(2)、输入的观测角为导线的左角。
3、程序代号注释N?导线观测角的折角数;A、B?导线起始点所后视的已知点的坐标x,y;C、D?导线起始点(即设站点)的坐标x,y;E、F?导线终点(已知点)的坐标x,y;G、H?在导线终点设站观测前视已知点的坐标x,y;T?起始站后视至起始点的方位角;M?终点站至前视已知点的方位角;J?观测的左角值;JB?角度闭合差;JL?允许的角度闭合差,程序中是以40√n计算的,如和要求的不一致,可改一下L6语句中的有关部分。
测量教学:导线测量的内业计算
*
x xB
x ∆yAB B
∆xAB
DAB
AB
xA
A
O
yA
yB
y
坐标增量正、负号的规律如下表所示。
象限 坐标方位角α
Δx
Δy
Ⅰ
0˚~90˚
+
+
Ⅱ
90˚~180˚
-
+
Ⅲ
180˚~270˚
-
-
Ⅳ
270˚~360˚
+
-
则B点坐标的计算公式为:
*
例6-1
已知AB边的边长及坐标方位角为, ;若A点的坐标为,
500.00 683.35 655.21
419.53 307.99
500.00
416.10 154.23
204.27 370.74
1 2 3 4 5
1 1212702 10 1212652 335708 231.40 191.95 129.24 192.01 129.26 500.00 500.00 1
辅 Wx xm 0.30m
Wy ym 0.09m
助 WD
Wx2
W
2 y
0.30m2 0.09m2
0.31m
计 算
WK
WD D
0.31m 1137.80m
1 3600
<WK p
1 2000
(2)计算坐标增量闭合差 *
闭合导线,纵、横坐标增量代数和的理论值应 为零,即
实际计算所得的∑△xm 、 ∑△ym 不等于零, 从而产生纵坐标增量闭合差Wx和横坐标增量闭合 差Wy,即
测量教学:导线测量的内业计算
导线测量内业计算的目的就是计算各 导线点的平面坐标x、y。
测绘中级 附合导线测量的内业计算的方法步骤
测绘中级附合导线测量的内业计算的方法步骤-CAL-FENGHAI.-(YICAI)-Company One1第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)y图6-10 坐标增量计算根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m 62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
测绘程序设计(VS2008)实验报告--高斯投影正反算
《测绘程序设计()》上机实验报告(Visual C++.Net)班级:学号:姓名:序号:二零一一年五月实验7 常用测量程序设计1.实验目的:1.1 巩固类的创建与使用;1.2 掌握数组参数的传递;1.3 掌握常用测绘程序设计的技巧。
1.42.实验内容:编写高斯投影正反算程序。
3.设计思路:这次的实验目的是实现高斯正反算。
需要考虑投影方式即分带的方式,又要考虑椭球参数的类型,所以我添加了两个函数来完成此功能。
分别是int SetProjectType(int m)和void SetParameter(int m,double &a,double &b)。
4.界面设计:界面设计很简单,具体见运行结果。
5.主要代码:文件名:GaussProjectDlg.cpp代码:const double PI=4*atan(1.0);//获得分带方式返回中央子午线经度int CGaussProjectDlg::SetProjectType(int m){UpdateData(TRUE);int n; //记录分带带号double L; //经度L=iDegreeL+iMinL/60+dSecondL/3600;if(m==1) //6度带{n=int(L/6)+1;L0=6*n-3;}else if(m==2) //3度带{n=int((L+1.5)/3);L0=3*n;}else if(m==3) //自主分带L0=L0;return L0;}//获取椭球参数void CGaussProjectDlg::SetParameter(int m,double &a,double &b) {if(m==1) //克拉索夫斯基椭球{a=6378245.0;b=6356863.0187730473;//e=sqrt(0.006693421622966);}else if(m==2) //1975国际协议椭球{a=6378140.0;b=6356755.2881575287;//e=sqrt(0.006694384999588);}else if(m==3) //WGS-84椭球{a=6378137.0;b=6356752.3142;//e=sqrt(0.0066943799013);}}void CGaussProjectDlg::OnBnClickedButtonpositivecal(){// TODO: 在此添加控件通知处理程序代码UpdateData(TRUE);double N;double t;double Eta;double X;double A0,A2,A4,A6,A8;double RadB;double Rou;Rou=180*3600/PI;double a,b,e1,e2; //椭球参数SetParameter(iParameterType,a,b);e1=sqrt(a*a-b*b)/a;e2=sqrt(a*a-b*b)/b;double l;L0=SetProjectType(iProjectType);double L;L=iDegreeL+double(iMinL)/60+dSecondL/3600;l=(L-L0)*3600;RadB=(iDegreeB+double(iMinB)/60+dSecondB/3600)*PI/180;N=a/sqrt(1-e1*e1*sin(RadB)*sin(RadB));t=tan(RadB);Eta=e2*cos(RadB);A0=1+3.0/4*e1*e1+45.0/64*pow(e1,4)+350.0/512*pow(e1,6)+11025.0/16384*pow(e1,8);A2=-1.0/2*(3.0/4*e1*e1+60.0/64*pow(e1,4)+525.0/512*pow(e1,6)+17640.0/16384*pow(e1,8));A4=1.0/4*(15.0/64*pow(e1,4)+210.0/512*pow(e1,6)+8820.0/16384*pow(e1,8));A6=-1.0/6*(35.0/512*pow(e1,6)+2520.0/16384*pow(e1,8));A8=1.0/8*(315.0/16384*pow(e1,8));X=a*(1-e1*e1)*(A0*RadB+A2*sin(2*RadB)+A4*sin(4*RadB)+A6*sin(6*RadB)+A8*sin(8*RadB));x=X+N/(2*Rou*Rou)*sin(RadB)*cos(RadB)*l*l+N/(24*pow(Rou,4))*sin(RadB)*pow(cos(RadB),3)*(5-t*t+9*Eta*Eta+4*pow(Eta,4))*pow(l,4)+ N/(720*pow(Rou,6))*sin(RadB)*pow(cos(RadB),5)*(61-58*t*t+pow(t,4))*pow(l,6);y=N/Rou*cos(RadB)*l+N/(6*pow(Rou,3))*pow(cos(RadB),3)*(1-t*t+Eta*Eta)*pow(l,3)+N/(120*pow(Rou,5))*pow(cos(RadB),5)*(5-18*t*t+pow(t,4)+14*Eta*Eta-58*Eta*Eta*t*t)*pow( l,5);UpdateData(FALSE);}void CGaussProjectDlg::OnBnClickedButtonantical(){// TODO: 在此添加控件通知处理程序代码UpdateData(TRUE);double t_f;double Eta_f;double B_f;double N_f;double M_f;double X=x;double B0;double K0,K2,K4,K6;double a,b,e1,e2; //椭球参数SetParameter(iParameterType,a,b);e1=sqrt(a*a-b*b)/a;e2=sqrt(a*a-b*b)/b;double A0;A0=1+3.0/4*e1*e1+45.0/64*pow(e1,4)+350.0/512*pow(e1,6)+11025.0/16384*pow(e1,8);B0=X/(a*(1-e1*e1)*A0);K0=1.0/2*(3.0/4*e1*e1+45.0/64*pow(e1,4)+350.0/512*pow(e1,6)+11025.0/16384*pow(e1,8));K2=-1.0/3*(63.0/64*pow(e1,4)+1108.0/512*pow(e1,6)+58239.0/16384*pow(e1,8));K4=1.0/3*(604.0/512*pow(e1,6)+68484.0/16384*pow(e1,8));K6=-1.0/3*(26328.0/16384*pow(e1,8));B_f=B0+sin(2*B0)*(K0+sin(B0)*sin(B0)*(K4+K6*sin(B0)*sin(B0)));t_f=tan(B_f);Eta_f=e2*cos(B_f);N_f=a/sqrt(1-e1*e1*sin(B_f)*sin(B_f));M_f=N_f/(1+e2*e2*cos(B_f)*cos(B_f));double B;B=B_f-t_f/(2*M_f*N_f)*y*y+t_f/(24*M_f*pow(N_f,3))*(5+3*t_f*t_f+Eta_f*Eta_f-9*Eta_f*Eta_f*t_f*t_f)*pow(y,4)- t_f/(720*M_f*pow(N_f,5))*(61+90*t_f*t_f+45*pow(t_f,4))*pow(y,6);double l;l=1.0/(N_f*cos(B_f))*y-1.0/(6*pow(N_f,3)*cos(B_f))*(1+2*t_f*t_f+Eta_f*Eta_f)*pow(y,3)+1.0/(120*pow(N_f,5)*cos(B_f))*(5+28*t_f*t_f+24*pow(t_f,4)+6*Eta_f*Eta_f+8*Eta_f*Eta_f* t_f*t_f)*pow(y,5);//将B转化为度分秒的形式double dDegB;dDegB=B*180/PI;iDegreeB=int(dDegB);iMinB=int((dDegB-iDegreeB)*60);dSecondB=((dDegB-iDegreeB)*60-iMinB)*60;double dDegL;dDegL=l*180/PI+L0;iDegreeL=int(dDegL);iMinL=int((dDegL-iDegreeL)*60);dSecondL=((dDegL-iDegreeL)*60-iMinL)*60;UpdateData(FALSE);}6.运行结果:实验的运行结果如下图所示:正算:反算:7.实验总结这次实验是实现高斯投影的正反算,方法很多,实现并不复杂,但是计算公式复杂,变量繁多,稍有不慎,就会造成计算错误。
(整理)导线复测测量方法与计算.
第一篇导线复测一、导线复测的内容当路线线形主要由导线控制时,导线的点位精度及密度直线影响施工放线的质量。
导线测量的内容包括:1、检查导线(网)是否符合规范及有关规定要求,平差计算是否经过有关方面检查与验收。
2、导线点密度是否满足施工放线的要求,必须时应进行加密,以保证在道路施工的全工程中,相邻导线点间能相互通视。
3、检查导线点的是否丢失、移动、并进行必要的点位恢复工作。
二、导线复测的外业导线复测的外业工作主要包括水准测量和距离测量以及导线点的饿加密等。
(一)、水准角的测量导线的水平角测量应使用不低于DJ6 级经纬仪,按测回法进行观测。
在附和导线中采用测量左角和右角,在闭和导线中均测内角。
(二)、导线边长测量导线边长应优先采用光电测距仪测量,无条件时,也可采用钢尺及经纬仪测距,采用测距仪测量导线边长时,距离和竖直角应往返观测一回,距离一测回读数两次,边长采用往测平距,返测平距仅作参考。
(三)、导线测量的技术要求各级主要技术参数表1-1测回数等级导线长度(km)平均边长(km)测角误差(〞)DJ6 DJ2角度闭合差(〞)相对闭合差一级 4 0.5 5 4 2 10 n 1/15000二级 2.4 0.25 8 3 1 16 n 1/10000三级 1.2 0.1 12 2 1 24 n 1/5000(四)、导线加 D2 D1-1原导线不能满足要求时,应进行导线点加密,以保证在道路施工的全过程中,相邻导线间不能通视。
加密的导线点 D1可以采用传统的方法,如线形三角锁、图根导线、交会法等。
然而,随着红 D1-2 (1-1) D1-3外测距仪的广乏使用,特别是全站仪的使用,采用支导线点更为方便。
如图1-1 所示,D1、D2 为已知导线点,待加密点为D1-1、D1-2、……。
现以全站仪支导线为例,简述其导线点加密的一般过程:1、在测站D1 上安置仪器,开机;2、输入测站D1 的坐标、仪器高、棱镜高;3、瞄准后视点D2,输入D2 的坐标或方位角;4、转动望远镜,瞄准待加点D1-1 上的反射棱镜,按下测键,稍后即可得到加密点的坐标。
精简4800坐标正反算程序多线贯通可手动输
精简4800坐标正反算程序多线贯通可手动输(线元法)测量 2008-08-14 20:50 阅读27 评论0字号:大中小功能简介及特点:1、选用高斯-勒让德公式作计算内核,保证精度,模块化设计,便于扩充功能。
2、线元数据可自动从数据库调用,也可手工输入。
3、可管理多条线路,如里程不在线路或线元范围,将警告里程偏大、偏小。
4、边桩计算设计为导线式递推方式,可用于由一个中桩推出结构物所有角点坐标。
5、反算实现了智能化操作,只需输入线路号(或手工输线元资料)、坐标,不需近似里程,即可自动从起点向后开始试算出里程、位置,如对算出里程、位置表示怀疑,还可以让计算器从终点起再向前试算下一个可能的位置(匝道、回头曲线同一坐标可能会有一个以上结果)。
第三次及以后试算才要求输入近似里程。
6、程序代码规范简洁,便于阅读、理解。
完整程序清单:ZFS %正反算主程序Lbl 1:B=.1739274226:C=.5-B:U"0 ZS 1 FS"=0=>Prog"ZS":≠>U=1=>Prog"FS":≠>Goto 1ZS %正算子程序{K}:Prog"ZZ":I=0:{I}:I"L"≠0=>"Prog"WY":≠>Prog"ZB"FS %反算子程序{KVW}:V"XC"W"YC":Lbl 2:Prog"ZZ":I=V-S:J=W-T:Pol(I,J:J=J-F:I=Rec(I,J:K=K+I:AbsI<1m=>Prog"WZ":≠>Goto2ΔM=0:{M}:M"0 NEXT"=0=>U=U+1:Goto 2:≠>U=1ZZ %高斯法中桩子程序(4节点)Prog"XL":M=K-L:O=(P-R)÷2PQR:D=.0694318442:E=.3300094782:F=1:G=1-E:H=1-D:I=5:Lbl 1:C[I]=A+MrC[I](1÷P+OMC[I]:Dsz I:Goto 1:S=X+M(BcosD+CcosE+CcosG+BcosH:T=Y+M(BsinD+CsinE+CsinG+BsinHWY %外移点计算子程序Lbl 1:J=90:{J}:J=F+J"<":F=J:S=S+Rec(I,J:T=T+J:Prog"ZB":I=0:{I}:I"L"≠0=>Goto 1WZ %位置显示子程序"KJ":K:Pause 1:J◢ZB %坐标显示子程序"XY":S:Pause 1:T◢YC %异常处理子程序U=1=>K=L:U=2ΔU=3=>K=M:U=4ΔU=5=>{K}:U=4ΔK<L=>"<<!":Z=1ΔK>M=>">>!":Z=1DL %断链处理子程序"DL":K=L:I>0=>K=L+Q-------------------------以上为程序运算部分,以下为数据库部分-----------------XL %线路数据库选择子程序Lbl 1:Z=0:N"0 SD"=0=>Prog"0"△N=1=>Prog"1"△N=2=>Prog"2"△有几条线路仿上行格式输几行Z=1=>{NLXYOPQRK}:Goto 10 %手工输入子程序L"K0"XYAQ"LS"P"R0"R"RN":M=L+Q:Prog"YC"1 %线路一数据库子程序①Lbl B:L=线路起点里程:M=线路终点里程:Prog"YC":Z=1=>Got o EΔ②Q=线元长:K≤L+Q=>X=起点X坐标:Y=起点Y坐标:A=起点方位角:P=起点半径:R=终点半径:GotoEΔL=L+Q:③......④Q=短链长:K<L+Q=>Prog "DL":Goto BΔL=L+Q:⑤Q=线元长:K≤L+Q=>X=起点X坐标:Y=起点Y坐标:A=起点方位角:P=起点半径:R=终点半径:GotoEΔL=L+Q:⑥......⑦Q=线元长:X=起点X坐标:Y=起点Y坐标:A=起点方位角:P=起点半径:R=终点半径:LblE2 %线路二数据库子程序输入要求和线路一相同。