ADAS图像处理+毫米波雷达安全预警系统
adas级别分类
adas级别分类ADAS(Advanced Driver Assistance Systems)是一种辅助驾驶系统,它通过传感器、通信设备和数据处理单元等组成部分,为驾驶员提供辅助功能,提高驾驶安全性和舒适性。
根据ADAS的功能和级别的不同,可以将其分为多个级别。
第一级别:驾驶员警示系统(Driver Warning Systems)驾驶员警示系统是ADAS的最基本级别,主要通过声音、图像或震动等方式提醒驾驶员注意安全。
例如,当车辆偏离车道或与前车距离过近时,系统会发出警示,提醒驾驶员及时采取措施。
第二级别:自适应巡航控制系统(Adaptive Cruise Control)自适应巡航控制系统在第一级别的基础上增加了自动控制速度和距离的功能。
系统通过雷达或摄像头等传感器感知前方车辆的速度和距离,并根据驾驶员设定的距离和速度范围,自动调整车辆的速度和距离,保持与前车的安全距离。
第三级别:车道保持辅助系统(Lane Keeping Assist)车道保持辅助系统在第二级别的基础上增加了车道保持功能。
系统可以感知车辆是否偏离车道,并通过自动调整方向盘的力度,使车辆保持在正确的车道内行驶。
这种系统可以提高驾驶员的驾驶舒适性和安全性,减少驾驶员的疲劳程度。
第四级别:自动驾驶系统(Automated Driving Systems)自动驾驶系统是ADAS的最高级别,它可以实现无人驾驶。
该系统可以完全代替驾驶员的驾驶操作,实现车辆的自动行驶。
自动驾驶系统通过多个传感器(如雷达、摄像头、激光雷达)感知周围环境,并通过高精度地图和数据处理单元,实现车辆的智能决策和控制。
尽管ADAS的级别越高,系统的功能越强大,但它并不意味着驾驶员可以完全放松警惕。
在使用ADAS时,驾驶员仍然需要保持对道路和交通状况的观察,并随时准备接管驾驶控制。
此外,ADAS系统也存在一定的局限性,如在恶劣天气条件下、道路标线模糊或交通状况复杂时,系统可能无法正常工作。
adas功能标准

adas功能标准
ADAS,即高级驾驶辅助系统,是一种利用传感器、算法和人工智能技术,为驾驶者提供安全驾驶辅助的汽车系统。
其功能主要包括以下几个方面:
1. 自适应巡航控制:通过雷达或摄像头检测车辆前方的道路情况,自动调整车速以保持与前车的安全距离。
2. 碰撞预警:通过激光雷达、摄像头或雷达等传感器监测车辆周围环境,当检测到可能发生碰撞的危险时,及时提醒驾驶者采取措施避免碰撞。
3. 车道偏离预警:利用摄像头检测道路线,当车辆无意识地偏离车道时,提醒驾驶者注意安全。
4. 自动泊车:通过摄像头、激光雷达等传感器,自动识别停车位并协助驾驶者完成泊车入位。
5. 夜视功能:通过红外线技术,增强夜间驾驶的视野,提高驾驶安全。
这些功能可以增强驾驶的安全性和舒适度。
但需要注意的是,这些功能并不是万能的,它们只能在特定的条件下提供辅助,不能替代人的判断和决策。
因此,在使用这些功能时,仍需保持警觉并时刻注意路况。
现代汽车的四种测距方法
现代汽车的四种测距方法现代汽车的四种测距方法随着科技的发展,现代汽车采用了多种高级驾驶辅助系统(ADAS)来提高行车安全性。
其中一个重要的功能是测距,以确保车辆与前方障碍物的安全距离。
以下是现代汽车常用的四种测距方法:1. 毫米波雷达(MMW)测距:毫米波雷达是一种使用毫米波频段进行测距的无线电技术。
它能够发送高频的电磁波,并通过接收返回的波来测量车辆与前方物体的距离。
毫米波雷达具有高精度和快速响应的特点,可以在各种天气条件下工作,包括雨雪等恶劣环境。
2. 激光雷达(LiDAR)测距:激光雷达是一种使用激光束来测距的技术。
它通过发射脉冲激光并记录其返回的时间来计算车辆与前方物体之间的距离。
激光雷达具有高分辨率和精确度,可以提供更准确的距离测量结果。
然而,激光雷达对于恶劣天气条件下的工作效果较差。
3. 立体视觉(Stereo Vision)测距:立体视觉利用车辆上的多个摄像头来模拟人眼的视觉系统。
通过将两个或多个图像进行比较,系统可以计算出物体与车辆之间的距离。
立体视觉可以提供高分辨率的深度图像,但对光线和环境条件要求较高。
4. 超声波测距:超声波测距系统使用车辆上的超声波传感器来发送和接收超声波信号。
这种技术通过测量信号的时间差来计算车辆与前方物体之间的距离。
超声波测距对于低速行驶和近距离障碍物检测非常有效,但在高速行驶或远距离检测方面可能受到限制。
这些测距方法通常结合使用,以提供更准确和可靠的测距结果。
它们在现代汽车的智能驾驶辅助系统中起着关键作用,帮助驾驶员识别和避免潜在的碰撞风险,提高行车安全性。
随着技术的不断发展,我们可以期待更先进和精确的测距技术在未来的汽车中的应用。
adas的毫米波雷达的道路测试标准
毫米波雷达是自动驾驶系统中至关重要的传感器之一,它通过发射和接收微波信号来探测周围环境和障碍物。
在道路测试中,毫米波雷达的性能和准确性至关重要,因为它直接关系到自动驾驶系统对道路情况的准确感知和安全驾驶能力。
在进行道路测试时,毫米波雷达需要满足一定的标准和要求,以保证其可靠性和准确性。
一些重要的毫米波雷达的道路测试标准包括:1. 辐射功率:毫米波雷达在道路测试中需要符合一定的辐射功率标准,以确保其不会对周围的人员和设备造成干扰或危险。
2. 探测距离和角度分辨率:毫米波雷达在道路测试中需要能够准确地探测周围障碍物的距离和角度位置,因此其探测距离和角度分辨率需要符合一定的标准要求。
3. 抗干扰能力:毫米波雷达在真实道路环境中可能会遇到各种干扰,如其他车辆的雷达信号、建筑物的反射等,因此其抗干扰能力需要进行充分测试和评估。
4. 动态性能:毫米波雷达在道路测试中需要能够快速而准确地感知周围环境的变化,包括车辆的速度、位置等动态信息。
5. 非均匀物体探测能力:毫米波雷达在道路测试中需要能够有效地探测非均匀形状的障碍物,如路边的树木、路牙等,以确保其完整地感知周围环境。
在进行毫米波雷达的道路测试时,需要对以上标准进行严格的测试和评估,以确保毫米波雷达能够在真实道路环境中稳定、准确地工作。
还需要针对特定道路环境和交通情况进行针对性的测试,以保证毫米波雷达的适用性和可靠性。
总结来说,毫米波雷达在道路测试中需要满足辐射功率、探测距离和角度分辨率、抗干扰能力、动态性能以及非均匀物体探测能力等标准要求。
通过严格的测试和评估,可以确保毫米波雷达能够在自动驾驶系统中发挥准确、可靠的作用。
在我看来,毫米波雷达的道路测试标准是至关重要的,它关系到自动驾驶系统的安全性和可靠性。
只有通过严格的测试和评估,毫米波雷达才能在真实道路环境中发挥其最大的作用,为自动驾驶系统提供准确、可靠的环境感知能力。
以上是对毫米波雷达的道路测试标准的深度和广度兼具的评估和撰写,希望能够满足您的要求。
ADAS八大系统
ADAS八大系统ADAS(Advanced Driving Assistant System)即高级驾驶辅助系统。
ADAS 是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。
对于最新的ADAS 技术来说,主动式干预也很常见。
汽车高级辅助驾驶系统通常包括:•导航与实时交通系统TMC;•电子警察系统ISA (Intelligent speed adaptation或intelligent speed advice);•车联网(Vehicular communication systems);•自适应巡航ACC(Adaptive cruise control);•车道偏移报警系统LDWS( Lane departure warning system);•车道保持系统(Lane change assistance);•碰撞避免或预碰撞系统(Collisionavoidance system或Precrash system);•夜视系统(Night Vision);•自适应灯光控制(Adaptive light control)•行人保护系统(Pedestrian protection system)•自动泊车系统(Automatic parking)•交通标志识别(Traffic sign recognition)•盲点探测( Blind spot detection)•驾驶员疲劳探测(Driver drowsiness detection)•下坡控制系统(Hill descent control)•电动汽车报警(Electric vehicle warning sounds)系统。
浅谈自动驾驶三大核心传感器技术
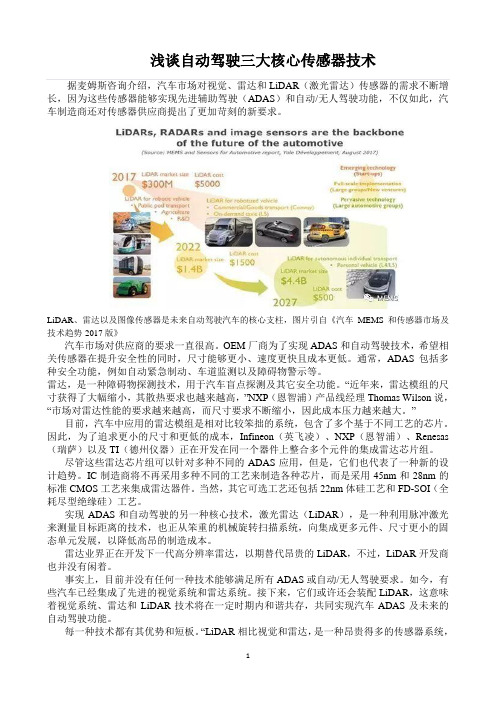
浅谈自动驾驶三大核心传感器技术据麦姆斯咨询介绍,汽车市场对视觉、雷达和LiDAR(激光雷达)传感器的需求不断增长,因为这些传感器能够实现先进辅助驾驶(ADAS)和自动/无人驾驶功能,不仅如此,汽车制造商还对传感器供应商提出了更加苛刻的新要求。
LiDAR、雷达以及图像传感器是未来自动驾驶汽车的核心支柱,图片引自《汽车MEMS和传感器市场及技术趋势-2017版》汽车市场对供应商的要求一直很高。
OEM厂商为了实现ADAS和自动驾驶技术,希望相关传感器在提升安全性的同时,尺寸能够更小、速度更快且成本更低。
通常,ADAS包括多种安全功能,例如自动紧急制动、车道监测以及障碍物警示等。
雷达,是一种障碍物探测技术,用于汽车盲点探测及其它安全功能。
“近年来,雷达模组的尺寸获得了大幅缩小,其散热要求也越来越高,”NXP(恩智浦)产品线经理Thomas Wilson说,“市场对雷达性能的要求越来越高,而尺寸要求不断缩小,因此成本压力越来越大。
”目前,汽车中应用的雷达模组是相对比较笨拙的系统,包含了多个基于不同工艺的芯片。
因此,为了追求更小的尺寸和更低的成本,Infineon(英飞凌)、NXP(恩智浦)、Renesas (瑞萨)以及TI(德州仪器)正在开发在同一个器件上整合多个元件的集成雷达芯片组。
尽管这些雷达芯片组可以针对多种不同的ADAS应用,但是,它们也代表了一种新的设计趋势。
IC制造商将不再采用多种不同的工艺来制造各种芯片,而是采用45nm和28nm的标准CMOS工艺来集成雷达器件。
当然,其它可选工艺还包括22nm体硅工艺和FD-SOI(全耗尽型绝缘硅)工艺。
实现ADAS和自动驾驶的另一种核心技术,激光雷达(LiDAR),是一种利用脉冲激光来测量目标距离的技术,也正从笨重的机械旋转扫描系统,向集成更多元件、尺寸更小的固态单元发展,以降低高昂的制造成本。
雷达业界正在开发下一代高分辨率雷达,以期替代昂贵的LiDAR,不过,LiDAR开发商也并没有闲着。
ADAS先进驾驶辅助系统
ADAS先进驾驶辅助系统【ADAS先进驾驶辅助系统】一、简介ADAS(Advanced Driver Assistance System)是先进驾驶辅助系统的缩写,它是一种结合了先进的感知技术、计算机算法和车辆控制系统的安全驾驶辅助系统。
该系统通过对车辆及周围环境的感知与分析,向驾驶员提供实时的警告、提示和干预,以提高驾驶安全性和舒适性。
二、主要功能1. 碰撞预警:ADAS系统通过使用雷达、摄像头和车载传感器等设备,可以及时检测到前方障碍物,判断与前车的距离和相对速度,并在必要时发出警报,提醒驾驶员采取行动避免碰撞。
2. 自适应巡航控制:该功能可以根据前方车辆的速度和距离,自动调节车辆的巡航速度,并保持与前车的安全距离。
当有其他车辆变道或加入巡航车道时,ADAS系统会自动减速,并在脱离危险范围后恢复原速。
3. 车道偏离预警:通过图像识别技术,ADAS系统可以识别车辆所在的车道,并对驾驶员的车道偏离行为进行实时监测。
一旦检测到车辆即将偏离车道,系统会发出声音或震动警告,以提醒驾驶员调整方向。
4. 盲点监测:该功能通过车辆侧面或后部的传感器,监测驾驶员视野盲区的情况。
当其他车辆或物体进入盲区时,ADAS系统会及时发出警报,帮助驾驶员避免盲点引发的潜在危险。
5. 自动泊车:ADAS系统还可以根据周围环境利用摄像头和传感器等装置,自动控制车辆的转向、加速和刹车,实现自动泊车功能。
驾驶员只需提供相关指令,系统将完成停车操作,提高停车的精确度和效率。
三、优势与前景1. 提高驾驶安全:ADAS系统通过实时感知和准确判断,可以帮助驾驶员及时做出反应,避免交通事故的发生,提高驾驶安全性。
2. 提升驾驶舒适度:ADAS系统不仅能够实现驾驶辅助功能,还可根据驾驶员的习惯和环境信息,个性化地调整车辆的行驶状态,提升驾驶舒适度。
3. 推动汽车智能化:ADAS系统是跨越传统汽车向智能汽车的重要技术支撑,集成了感知、计算和控制等多个先进技术,推动汽车行业向智能化发展。
adas功能
adas功能
ADAS即Advanced Driver Assistance Systems,中文翻译为“先进驾驶辅助系统”,是一种将现代科技应用到汽车上,为驾驶员提供各种辅助功能的系统。
目前的ADAS系统包括了多种技术,如雷达、摄像头、激光测距仪等。
它们能够实时监测车辆周围的环境,并提供给驾驶员关于车道保持、自动刹车、盲区警示、交通标志识别等辅助信息。
首先,ADAS系统中的车道保持功能可以通过摄像头或雷达实时监测车辆在道路上的位置,触发警报或自动调整方向以保持在合适的车道内。
这对于长时间驾驶或在高速公路上行驶的驾驶员来说,可以提供一定程度的安全保障。
其次,自动刹车是ADAS系统中的另一个重要功能。
通过使用雷达和摄像头监测前方道路的状况,当系统检测到紧急情况时,它可以自动刹车以避免碰撞。
这在交通拥堵或驾驶员不注意时,能够减少事故的发生,提高行车安全性。
此外,盲区警示也是ADAS系统的一项重要功能。
通过安装在车辆的侧面和后部的摄像头或雷达,系统可以实时监测车辆周围的盲区。
当有其他车辆进入盲区时,系统会发出警报,提醒驾驶员进行注意。
最后,交通标志识别是ADAS系统中的另一个实用功能。
利用摄像头和图像处理技术,系统可以实时识别道路上的交通标
志,并将相关信息显示在驾驶员的仪表盘上。
这对于驾驶员来说,能够更加方便地获取道路规则和限速等重要信息,确保他们始终在合法的范围内行驶。
总之,ADAS系统是现代汽车中不可或缺的一部分,它通过各种先进的技术,为驾驶员提供诸多辅助功能,提高驾驶安全性和舒适性。
随着科技的不断进步,ADAS系统将继续发展,为驾驶员提供更多更强大的功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAS(77G毫米波雷达+视频)
预警系统
ROME THROUGH THE WORLD WITH STRONG BELIEF
ROME THROUGH THE WORLD WITH STRONG BELIEF
数据来源:http://www.who.int/mediacentre/factsheets/fs358/en/index.html
据可靠数据调查统计
交通事故现状
全世界每年有120万人死于
道路交通伤害
受伤者多达5000万人 如果不采取强有力的预防措施
今后20年中道路交通伤害的死亡和受伤人数将增加65%左右
如果不采取适当措施
到2020年道路交通伤害预计将成为
全球疾病与伤害负担的第三位原因
ROME THROUGH THE WORLD WITH STRONG BELIEF
人为因素
93% 其它 7% 弗吉尼亚理工学院交通运输学院公布了一组
实际的驾驶员习惯、分心和碰撞原因的调查
数据分析,将近80%的碰撞是由于驾驶员事发前3秒的疏忽造成
来源:/briefdetails.aspx?id=19
事故原因分析
80%
事发前3秒的分神 其它 20%
ADAS毫米波雷达预警系统概述
ADAS+毫米波雷达,是基于视觉图像分析+毫米波雷达相结合的高科技预警产品,能够即时分析前方汽车的运动状态,同时也能计算自驾驶车辆的情况,根据驾驶者的习惯,对行车过程中有可能发生驾驶危险时进行提醒,同时也是对于瞌睡驾驶和鲁莽驾驶者的习惯纠正,让行车安全更有保障!
ROME THROUGH THE WORLD WITH STRONG BELIEF
ADAS主机77G毫米波雷达ROME THROUGH THE WORLD WITH STRONG BELIEF
ROME THROUGH THE WORLD WITH STRONG BELIEF
技术参数
ROME THROUGH THE WORLD WITH STRONG BELIEF
技术参数
ROME THROUGH THE WORLD WITH STRONG BELIEF
产品功能及应用
ADAS+毫米波雷达产品功能及应用介绍
ROME THROUGH THE WORLD WITH STRONG BELIEF
ROME THROUGH THE WORLD WITH STRONG BELIEF
一、正向防追尾警告:识别各种车辆,如轿车、卡车和公共汽车-提供白天和夜间的特点,以图像扫描比对的方式, 侦测出前方运动物体状态,计算出有可能发生碰撞的警告。
通过摄像头拍摄
前方运动车辆 1、用反转效应提取 车辆轮廓边缘 2、确定车辆特点
发现投影暗层
3、夜间车灯捕捉
对称性比对
ROME THROUGH THE WORLD WITH STRONG BELIEF
二、车道偏离警告:
1)识别不同的车道标记,如实线、虚线和单双线等标记。
2)
识别车道不同的颜色,如白颜色和黄颜色。
通过相机捕获运动 车辆前方路面图像
分割出感兴趣区域 边缘提取与持续跟踪
三、前向车辆接近警告
当车辆在等红绿灯、或者排队前行、或者本车往前溜车时
四、前车起动报警
如果前面的车辆开始从静止到向前移动,而驾驶车辆在2秒钟内不动时。
车辆静止
车辆向前靠近
车辆静止车辆向前启动
ROME THROUGH THE WORLD WITH STRONG BELIEF
ROME THROUGH THE WORLD WITH STRONG BELIEF
数字摄像头 Digital Camera
核心算法
(Flash ROM) algorithm
影像显示驱动 Display driver ( AV/ HDMI out )
双核CPU 信息运算处理(FCW+LDW+ PCW )
运算模组 (operation Module )
接口界面 Interface 4G 数字通讯接口 4G Digital signal (can or RS32)
模拟信号接口 Analog signal (GPIO and Speaker)
缓冲内存 Dram (512M )
原理方框示意说明
电源 Power
毫米波雷达 Millimeter wave
radar
产品工作效果
ROME THROUGH THE WORLD WITH STRONG BELIEF
数据管理平台
ROME THROUGH THE WORLD WITH STRONG BELIEF
RS232数据输出
ROME THROUGH THE WORLD WITH STRONG BELIEF
市场应用
市场需求(校车、物流货车、长途客运车、私家车等等)
ROME THROUGH THE WORLD WITH STRONG BELIEF
谢谢!
联系我们 400 6055 072 ROME THROUGH THE WORLD WITH STRONG BELIEF。