四旋翼飞行机器人的设计与制作
四旋翼无人机设计与制作毕业论文

四旋翼无人机设计与制作毕业论文目录摘要 ................................................................................................ 错误!未定义书签。
Abstract ................................................................................................... 错误!未定义书签。
1绪论 .. (2)1.1研究背景及意义 (2)1.2 国内外四旋翼飞行器的研究现状 (2)1.2.1国外四旋翼飞行器的研究现状 (2)1.2.2国内四旋翼飞行器的研究现状 (4)1.3 本文研究内容和方法 (5)2 四旋翼飞行器工作原理 (7)2.1 四旋翼飞行器的飞行原理 (7)2.2 四旋翼飞行器系统结构 (7)3 四旋翼飞行器硬件系统设计 (9)3.1 微惯性组合系统传感器组成 (9)3.1.1 MEMS陀螺仪传感器 (9)3.1.2 MEMS加速度计传感器 (9)3.1.3 三轴数字罗盘传感器 (10)3.2 姿态测量系统传感器选型 (10)3.3 电源系统设计 (12)3.4 其它硬件模块 (12)3.4.1 无线通信模块 (12)3.4.2 电机和电机驱动模块 (13)3.4.3 机架和螺旋桨的选型 (14)3.4.4 遥控控制模块 (15)4 四旋翼飞行器姿态参考系统设计 (17)4.1 姿态参考系统原理 (17)4.2 传感器信号处理 (18)4.2.1 加速度传感器信号处理 (18)4.2.2 陀螺仪信号处理 (18)4.2.3 电子罗盘信号处理 (19)4.3 坐标系 (19)4.4 姿态角定义 (20)4.5 四元数姿态解算算法 (21)4.6 校准载体航向角 (29)5 四旋翼飞行器系统软件设计 (31)5.1 系统程序设计 (31)5.1.1 姿态参考系统软件设计 (31)5.1.2 PID控制算法设计 (32)结论 (34)参考文献 (35)绪论1.1研究背景及意义随着MEMS传感器、无刷电机、单片机以及锂电池技术的发展,四旋翼飞行器现在已经成为航模界的后起之秀。
小型四旋翼低空无人飞行器综合设计

3、传感器应用
传感器技术在小型四旋翼低空无人飞行器中扮演着重要的角色。通过使用多种 传感器,可以实现飞行器的定位、导航、控制等功能。为了保证数据的准确性 和可靠性,需要对传感器进行定期校准和维护。
实验结果与分析
通过仿真实验,本次演示提出的混合控制方法取得了显著的实验效果。在轨迹 跟踪实验中,飞行器能够快速准确地跟踪给定的轨迹,具有良好的动态性能和 稳定性。此外,通过与单一控制方法的对比实验,本次演示提出的混合控制方 法在跟踪精度和稳定性方面均表现出明显的优势。
结论与展望
本次演示针对四旋翼无人飞行器的非线性控制问题,提出了一种基于鲁棒控制 和滑模控制的混合控制方法。通过仿真实验验证了该方法的有效性。然而,仍 然存在一些不足之处,例如对飞行器的动态特性分析不够准确、控制系统的实 时性有待提高等。
设计思路
1、总体设计
小型四旋翼低空无人飞行器主要由机身、旋翼、遥控器等部分组成。机身采用 轻量化材料制成,以减小飞行器的重量,便于携带;旋翼则由四个电机驱动, 以实现飞行器的稳定飞行;遥控器则用于控制飞行器的飞行轨迹和高度。
2、硬件设计
硬件配置是小型四旋翼低空无人飞行器的核心部分,主要包括电池、传感器、 遥控设备等。电池选用高容量、轻量化的锂离子电池,以延长飞行器的续航时 间;传感器则采用GPS、加速度计、陀螺仪等,以实现飞行器的定位、导航和 控制;遥控设备则选用2.4GHz遥控器,以实现遥控设备的无线传输。
小型四旋翼低空无人飞行器综 合设计
01 引言
03 参考内容
目录
自制四轴飞行器之路

自制四轴飞行器之路
四轴飞行器,又称四旋翼飞行器,简称四轴、四旋翼。
四轴飞行器的四个螺旋桨与电机直接相连,通过改变电机转速获得旋转机身的力,从而调整自身姿态。
四轴的叶片转速极高,有一定的危险性,一般不能在室内飞,特别是在调试过程中更加不稳定,轻则炸鸡撞坏物品,重则伤到人。
我做四轴的主要目的是为了学习飞控算法,这个过程肯定少不了调试,为了安全,我选择做一个小一点的,手掌那么大的四轴,叶片的威力比较小,价格也便宜,即使摔坏也不心疼。
这种小四轴一般采用PCB做机架,用720空心杯电机代替无刷电机,用MOS管代替电调,电池采用3.7v锂聚合物电池(尺寸跟手机电池差不多,但是放电电流要大很多),遥控用2.4G无线模块,或者用蓝牙连接手机,成本100左右,续航时间大概6-7分钟,遥控距离在10米以内。
选择零件
四轴上最重要的就是飞控,所以第一步:选择飞控。
市面上有许多现成飞控,也可以自己用电子元件做一个分控。
有很多有名的开源飞控,例如KK,QQ,匿名,MultiWii/MWC,APM/PIX等。
KK、QQ飞控功能较少,只有基本的四轴飞行功能,甚至不支持GPS。
匿名飞控是国内新出现的飞控,功能比以上两个要多,价格也要贵很多。
MultiWii/MWC飞控是基于arduino的,支持GPS,能路线规划,在线调试。
APM也是基于arduino的,功能更为齐全,硬件也更为复杂,飞控中有两块单片机,分别执行不同功能。
APM已将arduino的性能开发到极限,于是有了升级版PIX,从arduino 转到了STM32,处理速度提升了10倍,同样用了两块不同型号的STM32协同运作,是目前已知的最好的开源飞控。
蝴蝶状四旋翼无人机设计说明
蝴蝶状四旋翼无人机设计说明1主控制器电路设计STM32F103RCT6是STM32家族中性能比较高端的单片机,将单片机作为基于视觉的四旋翼路径跟踪系统的主控控制器芯片,其内核主要是Cortex-M3。
处理速度快,工作效率高。
2. STM32F103最小系统其STM32F103RCT6、电源相关的模块、有关MCU的复位装置、对信号产生时钟周期的模块,以及下载调试电路都属于最小系统。
与其他型号的的MCU相比较而言,因为内部的通讯接口、I/O口以及高级定时器等设置则使工作更加快捷高效。
供电电路:官方公示的正常运行电压为2V至3.6V。
其正常工作必需的1.8V电源不但可以通过电池等提供还可从其MCU内部设置的调节器来调节得到,用来在应对突发断电的时候,使单片机依然能够正常工作,维持单片机的数据存储和RTC实时时钟的正常工作。
复位电路:按下按键,复位RESET引脚接地,复位引脚电平被拉低,单片机产生低电平复位。
按键松开后,电源通过上拉电阻给电容充电,RESET引脚电压逐渐增加,最终以电源达到3.3v以结束这一复位过程。
如上图所示的复位电路中电容的主要的功能是通过提供一定的脉冲信号以其宽度这一性质产生复位信号。
时钟电路:共有五个时钟源在 STM32中,分别为 HSI、HSE、LSI、LSE、PLL。
ST官方推荐的时钟信号来源是外接8M晶振,通过PLL进行9倍频,产生72M的时钟源,为单片机提供时钟信号,这个就是系统时钟。
3. 九轴姿态角输出模块JY-901JY-901模块内部了集成高精度的三轴陀螺仪、三轴加速度计、地磁场传感器,角度传感器,通过模块上的高性能单片机,配合卡尔曼滤波算法,,能够准确的,快速的解算出当前模块的运动状态。
且解算出的运动精度可达0.01度,且输出的数据稳定,可直接使用。
JY-90模块有着串口和IIC两种通讯接口,可以方便与各种型号的单片机链接。
其中串口的输出速率为标准的2400bps~921600bps之间,IIC接口速度最快可达400K。
简易四旋翼飞行器制作明细
无人飞行器应用概述及四旋翼遥控飞行器的制作2016年04月26日序————遥控飞机是一种由无线电遥控设备以及地面程序控制装置操纵的无人驾驶飞行器。
从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机等。
自二十世纪初,全球无人机技术的普及将无人飞行器的应用推广开来,现已形成了军用,民用等多个不同体系,通过搭载不同的机载设备,无人飞行器可以具备多种实用性功能。
随着无人飞行器技术的发展而逐渐形成的自动化、模块化、可持续航行等诸多技术标准已经使得无人飞行器的制作与使用变得更为简单,高效。
本次设计为四旋翼于无人遥控飞行器的制作与开发,运用所学电子工艺技术以及电路知识,完成对飞行器的基本电路设计,实现无人飞行器基本功能。
无人飞行器的构成包括飞行平台,动力装置,导航飞控系统,电气系统,任务设备,显示系统,操纵系统,机载设备,地面控制装置等。
无人飞行器设计,以无人飞行器基本构成思想为指导,在保证基本组件及基本模块正确使用的前提下,对飞行器相关结构进行简化,减小飞行器体积,减轻飞行器质量,在提高飞行器易操作性及灵活性的同时,也无形中延长了飞行器的空中续航时间,使得飞行器的高空能力得到进一步提升。
本次设计着重阐述无人飞行器设计以及制作关键步骤,通过对制作过程的细致阐释,对纯手工制作无人飞行器进行关键性的、系统的、细致的的描述。
无人飞行器的概念及用途无人机所以会受到如此重视, 其原因是自身所拥有的独特优势, 现代科技的发展使得防空武器的性能日益提升, 这无疑大大增加了有人机在空战中的风险程度, 而无人机则适应了现代战争对减少乃至避免人员伤亡的要求。
再则, 从研制、使用和维护成本看, 相当于有人机而言, 无人机的研制、使用和维护成本要低廉得多。
更何况, 无人机因其自身的优越性能, 可以在超低空和超高空长时间盘旋, 较之有人机其活动空间和范围更为广阔。
有鉴于此, 研制和发展无人机成为各国军方尤其是发达国家军方的重要选择。
一种四旋翼航拍无人机的设计
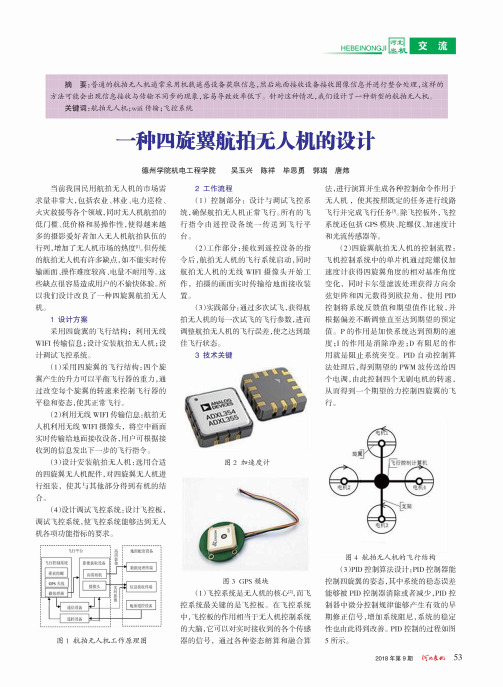
德州学院机电工程学院吴玉兴陈祥毕思勇郭瑞唐炜当前我国民用航拍无人机的市场需 求量非常大,包括农业、林业、电力巡检、 火灾救援等各个领域,同时无人机航拍的 低门槛、低价格和易操作性,使得越来越 多的摄影爱好者加人无人机航拍队伍的 行列,增加了无人机市场的热度[1]。
但传统 的航拍无人机有许多缺点,如不能实时传 输画面、操作难度较高、电量不耐用等。
这 些缺点很容易造成用户的不愉快体验。
所 以我们设计改良了一种四旋翼航拍无人 机。
1设计方案采用四旋翼的飞行结构;利用无线 W IF I 传输信息;设计安装航拍无人机;设计调试飞控系统。
(1)采用四旋翼的飞行结构:四个旋翼产生的升力可以平衡飞行器的重力,通 过改变每个旋翼的转速来控制飞行器的 平稳和姿态,使其正常飞行。
(2)利用无线W IF I 传输信息:航拍无人机利用无线W IF I 摄像头,将空中画面 实时传输给地面接收设备,用户可根据接 收到的信息发出下一步的飞行指令。
(3)设计安装航拍无人机:选用合适的四旋翼无人机配件,对四旋翼无人机进 行组装,使其与其他部分得到有机的结 合。
(4)设计调试飞控系统:设计飞控板,调试飞控系统,使飞控系统能够达到无人图1航拍无人机工作原理图2工作流程(1)控制部分:设计与调试飞控系 统,确保航拍无人机正常飞行。
所有的飞 行指令由遥控设备统一传送到飞行平 台。
(2)工作部分:接收到遥控设备的指 令后,航拍无人机的飞行系统启动,同时 航拍无人机的无线W IF I 摄像头开始工 作,拍摄的画面实时传输给地面接收装 置。
(3)实践部分:通过多次试飞,获得航 拍无人机的每一次试飞的飞行参数,进而 调整航拍无人机的飞行误差,使之达到最 佳飞行状态。
3技术关键图3 GPS 模块(1)飞控系统是无人机的核心[2],而飞控系统最关键的是飞控板。
在飞控系统 中,飞控板的作用相当于无人机控制系统 的大脑,它可以对实时接收到的各个传感器的信号,通过各种姿态解算和融合算法,进行演算并生成各种控制命令作用于 无人机,使其按照既定的任务进行线路飞行并完成飞行任务[3]。
四旋翼自主飞行器设计方案曾庆涛

本设计主要通过STM32微处理器采集3轴加速度传感器和3轴陀螺仪对飞行器的姿态进行检测,控制4个高速无刷电机带动旋翼旋转,实现飞行器的悬停、升降、前后左右移动,控制四轴飞行器方法是采取的姿态控制,该控制系统主要由2.4GHz的NRF24l01无线发送模块,STM2微处理器,MPU6050陀螺仪,加速度计组成。通过无刷直流电机给四轴提供飞行动力。最后通过上位机,调节PID参数,实现四轴飞行器飞行要求。
2.2.2电机驱动模块
根据中心控制模块指令驱动各个电机到达指定转速,将电机的速度通过测速反馈装置反馈给控制器模块,利用闭环控制来控制电机的转速为预期值。从而实现四轴飞行器不同的飞行状态。
2.2.3主控制模块
中心控制模块即飞行控制系统的核心处理器作为整个系统的核心控制部分,主要负责采集传感器检测到的姿态角速率(俯仰角速率、横滚角速率)、三轴的线加速度和航向信息并实时解算;根据检测到的飞行信息,结合既定的控制方案,计算输出控制量,转化为相应的PWM信号经驱动电路后驱动四个电机工作,保持四轴飞行器稳定飞行,通过无线通信模块与地面站进行数据的传输,实现接收控制命令改变飞行状态和下传飞行状态数据。
2.1.2俯仰运动
在图(b)中,使电机1的转速上升,同时使电机3的转速下降,而电机2、电机4的转速保持不变。在这个过程中,电机1和电机3改变量应该大小相等。当电机1和电机3产生的不平衡扭矩达到一定的时候,飞行器将绕y轴旋转(方向如图所示)。同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
图2-2四轴飞行器飞行动力原理
2.1.3滚转运动
滚转运动和俯仰运动原理相同,区别在于一个是沿Y轴,一个是沿X轴。效果如图c所示。
四旋翼飞行器设计资料
四旋翼飞行器的设计查重98%四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制单元,给出了飞行控制系统的硬件设计,研究了设计中的关键技术;由于采用贴片封装和低功耗的元器件,使飞行器具有重量轻、体积小、功耗低的优点;经过多次室内试验,该硬件设计性能可靠,能满足飞行器起飞、悬停、降落等飞行模态的控制要求.一.微小型四旋翼飞行器的发展前景根据微小型四旋翼飞行器发展现状和相关高新技术发展趋势,预计它将有以下发展前景。
1 )随着相关研究进一步深入,预计在不久的将来小型四旋翼飞行器技术会逐步走向成熟与实用。
任务规划、飞行控制、无 G P S 导航、视觉和通信等子系统将进一步健全和完善,使其具有自主起降和全天候抗干扰稳定飞行能力。
它未来的主要技术指标:任务半径 5 k m,飞行高度 1 0 0 m,续航时间 1 h ,有效载荷约 5 0 0 g ,完全能够填补目前国际上在该范围内侦察手段的空白。
2 )未来的微型四旋翼飞行器将完全能够达到美国国防预研局对 M A V基本技术指标的要求。
随着低雷诺数空气动力学研究的深入,以及纳米和 M E MS 技术的发展,四旋翼 M A V必然取得理论和工程上的突破。
它将是一种有 4个旋翼的可飞行传感器芯片,是一个集成多个子系统 ( 导航与控制、动力与能源、任务与通信等子系统) 的高度复杂ME M S系统;不但能够在空中悬停和向任意方向机动飞行,还能飞临、绕过甚至是穿过目标物体。
此外,它还将拥有良好的隐身功能和信息传输能力。
3 )微小型四旋翼飞行器的编队飞行与作战应在未来的战争中,微小型四旋翼飞行器的任务之一将是对敌方进行电子干扰并攻击其核心目标。
单个微小型飞行器的有效载荷量毕竟有限,难以有效地完成任务,而编队飞行与作战不仅可以极大地提高有效载荷量,还能够增强其突防能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图书分类号:密级:毕业设计(论文)四旋翼飞行机器人的设计与制作Four-rotor flying robot designand production学位论文原创性声明此人郑重声明:所呈交的学位论文,是此人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,此论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对此文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
此人完全意识到此声明的法律结果由此人承担。
论文作者签名:学位论文版权协议书此人完全了解关于收集、保存、使用学位论文的规定,即:此校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸此复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将此学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编此学位论文。
论文作者签名:摘要四旋翼飞行机器人它拥有着四个可以旋转的旋翼,属于多旋翼飞行机器人。
四旋翼飞行机器人具有着两组对称着分布的旋翼。
它是控制着两组对称的旋翼转动速度,而不是机械结构来完成着各种各样的飞行举动行为。
四旋翼飞行机器人是一种外型新颖、功能优越的可以垂直起降的飞行机器人,结构简单、没有机械结构、飞行比较平稳方便。
然而可以应用在人类无法接触到的一些复杂恶劣的环境当中去。
在很多行业都有涉及到了,比如遥感勘测、军事侦察、喷洒农药、实时监控中,四旋翼飞行机器人及多旋翼飞行机器人已经得到了很广阔的应用在各个方面,并且也形成了相关产业。
四旋翼飞行机器人还具有飞行姿态控制过程复杂、非线性控制、控制数量多等这些特性。
此次课题在综合了四旋翼飞行机器人的现状、技术与应用的基础之上,为了完成四旋翼飞行机器人造价低造型微的原则,按照它的数学模型以及控制系统的功能要求,完成了四旋翼飞行机器人的飞行姿态控制、姿态数据的获取和飞行姿态解算于MCU上。
硬件上使用的是stm32系列STM32F103C8T6 32位处理器作为主控制器负责分析处理数据,依照姿态运算得出来的结果,输出电机的控制信号;采用场效应管驱动电路来驱动的心杯电机;检测姿态信息的惯性测量单元mcu-6050传感器模块用途;负责沟通实施飞行数据分析PC 机与蓝牙模块。
整个的软件和硬件系统基此处于模块化设计的思想之上。
传感器数据使用的通用数字接口和数据在飞行机器人各传感器采集到的交流和沟通。
基于软件之上,飞行姿态控制软件的编写,在单片机上完成quaternion法和卡尔曼滤波算法,并把正确的姿态角也解算出来。
姿态角的闭环控制也可以使用控制进行,稳住了飞行姿态。
这次所设计的四旋翼飞行机器人可以很好的达到稳定飞行状态,并且抗震能力强。
飞行姿态控制算法可完美完成使四旋翼飞行机器人稳定的飞行。
关键词 :四旋翼飞行机器人;姿态控制算法;飞行控制系统;滤波;AbstractFour-rotor flying robot which has a four rotatable rotor, are multi-rotor flying robot. Four-rotor flying robot with two symmetrical distribution of the rotor. It is to control the rotational speed of the rotor two symmetrical, rather than mechanical structure to accomplish a variety of flight doings. Four-rotor flying robot is a novel appearance, superior functions can VTOL flying robots, simple structure, no mechanical structure, convenient flight is relatively stable. However, it is used in humans can not come into contact with some of the complex and harsh environments were to go. In many industries we have involved, such as telemetry, military reconnaissance, spraying pesticides, real-time monitoring, four-rotor flying robot and multi-rotor flying robot has been a very broad application in various aspects, and also formed the related industries. Four-rotor flying robot also has the attitude control process is complex, nonlinear control, quantity control more of these characteristics.The subject of the present situation is a mix of technology and application of four-rotor flying robot above, in order to complete the four-rotor flying robot principles of low cost small shape, according to the functional requirements of its mathematical models and control systems, completed a four-rotor Attitude control flying robots, attitude and flight data acquisition attitude solution to the MCU. Use the hardware is stm32 series STM32F103C8T6 32-bit processor is responsible for data analysis and processing as the main controller, the result was out of operation in accordance with the attitude control signal output of the motor; with FET drive circuit to drive the hearts of the cup motor; detecting posture mcu-6050 inertial measurement unit sensor module uses information; responsible for the implementation of flight data analysis communication between PC and Bluetooth module. The entire software and hardware systems in the above basic idea of modular design. Universal Digital Interface and data sensor data used in flying robots each sensor to the exchange and communication. Based on the software, attitude control writing software, complete quaternion and Kalman filtering algorithms on the microcontroller, and the right attitude angle is also solving it. Closed-loop control attitude angle control can also be used, to stabilize the flight attitude. The design of the four-rotor flying robot can be a good stable flight, and seismic capability. Attitude control algorithm can complete a perfect four-rotor flying robot to make stable flight.Keywords Four-rotor flying robot attitude control algorithm flight control system extended Kalman filter目录摘要 (II)Abstract (III)1.绪论 (1)1.1选题背景 (1)1.2.国内与国外分析情况探究 (3)1.3 四旋翼飞行机器人在技术上存在的问题和其突出点 (4)1.3.1 四旋翼飞行机器人它有哪些突出点 (4)1.3.2 四旋翼飞行机器人的技术难点 (5)1.4小结 (5)2.四旋翼飞行机器人的基本概况和它的剖析算法 (7)2.1飞行机器人基本概况 (7)2.2四旋翼飞行机器人的航姿 (11)2.3滤波........................................................................................................ 错误!未定义书签。
2.3.1卡尔曼滤波..................................................................................... 错误!未定义书签。
2.3.2互补滤波算法................................................................................. 错误!未定义书签。