【免费下载】ansys中荷载步的讲解
ansys培训讲ansys载荷考虑

18
惯性载荷(续)
特点
• 惯性载荷只有结构分析中有 。
• 惯性载荷是对整个结构定义
的,是独立于实体模型和有
限元模型的。
绕Y轴的角速度
• 考虑惯性载荷就必须定义材 料密度 (材料特性DENS)。
19
添加载荷应遵循的原则
• 简化假定越少越好。 • 使施加的载荷与结构的实际承载状态保持吻合。
准则
20
• 添加刚体运动约束, 但不能添加过多的(其它)约束:
X constraints
Bracket
一块二维平面应力、平面应变、梁或 杆模型至少需要三个约束。
该模型边界条 件合理?
轴对称模型至少需要一个(轴向)约束。 三维实体或壳模型至少需要六个约束。
26
添加载荷应遵循的原则
• 实际上,集中载荷是不存在的。 然而,只要你不关心集
29
选择求解器
求解器 的功能是求解关于结构自由度的联立线性方程组 - 这
个过程可能需要花费几分钟(1,000个自由度) 到几个小时或 者几天 (100,000 - 1,000,000 自由度) , 基本上取决于你所 用计算机的速度。对于简单分析,可能需要一、两次求解 。对于复杂的瞬态或非线性分析,可能需要进行几十次、 几百次、或者甚至几千次求解。
• 对于由壳单元(s h e l l s )、平面单元(XY plane elements)或者 三维实体单元(3-D solids)等组成连续性模型,集中载荷意味 存在应力奇异点。 – 你可以用等效集中载荷代替静力分布载荷,并添加到模 型上。 – 如果你不关心(集中载荷作用)节点处的应力,这样做是可 以接受的。
准则
31
波前(Wavefront)求解器
ansys中子步和载荷步的含义与设置方法
在Ansys中,子步和载荷步是非常重要的概念,对于进行复杂仿真分析的工程师来说,深入理解并正确设置子步和载荷步是非常关键的。
接下来,我将从深度和广度的角度,结合自己的理解和经验,详细解释这两个概念的含义和设置方法。
1. 子步的含义与设置方法让我们来理解什么是子步。
在Ansys中,子步是为了确保仿真收敛而进行的时间步长分割。
当仿真过程中存在非线性行为或者材料模型的非线性影响较大时,我们就需要使用子步来有效地控制仿真的精度和稳定性。
在设置子步时,首先需要考虑仿真的时间范围,并根据具体情况进行合理的分割。
一般来说,我们可以根据仿真模型的非线性程度和材料特性来确定子步的数量和大小。
对于高度非线性的模型,需要细分子步以确保仿真的准确性;而对于较为线性的模型,则可以适当减少子步以提高仿真效率。
在设置子步时,还需要考虑到各个载荷的作用情况,以确保在每个子步内能够充分考虑不同载荷的影响。
通过合理设置子步,可以有效地控制仿真的收敛性,并且提高仿真结果的准确性。
2. 载荷步的含义与设置方法载荷步是指在Ansys中对载荷进行分段加载的方法。
在工程仿真中,往往会面对需要分段加载的情况,这时就需要使用载荷步来对载荷进行合理分段,并进行逐步加载以观察结构的响应。
在设置载荷步时,首先需要考虑加载的类型和大小,然后根据具体的分析目的来确定载荷的分段情况。
通常情况下,我们可以根据结构的承载能力和材料的特性来确定载荷的分段加载,并且可以根据仿真的结果来调整载荷步的设置,以得到更加准确的分析结果。
总结和回顾通过对子步和载荷步的含义和设置方法的详细解释,我们可以看到,在Ansys中合理设置子步和载荷步对于确保仿真的准确性和稳定性是非常重要的。
通过合理分割子步和载荷,我们可以更好地控制仿真的收敛性和精度,并且可以更加准确地模拟结构的响应情况。
个人观点和理解在我的实际工程仿真经验中,我发现合理设置子步和载荷步可以大大提高仿真的精度和效率。
ansys中子步和载荷步的含义与设置方法
ansys中子步和载荷步的含义与设置方法在ANSYS中,子步和载荷步是用于模拟复杂工程问题的重要概念。
子步(Substep)是为了更精确地捕捉结构在非线性或动态情况下的行为而引入的一个概念。
而载荷步(Load Step)是将模拟分为多个连续的时间段或加载阶段,以模拟结构在不同加载条件下的响应。
子步是在每个载荷步中进一步细化时间,将一个载荷步划分为多个小的时间间隔。
这样做的目的是为了更准确地模拟结构在非线性或动态情况下的行为。
在每个子步中,ANSYS会根据结构的当前状态进行计算,然后根据所设定的子步数和时间步长进行迭代计算,直到达到收敛条件。
设置子步的方法主要包括以下几个步骤:1. 定义载荷步:在ANSYS中,首先需要定义每个载荷步所需的加载条件,如施加的力、位移或温度等。
这可以在ANSYS的预处理环境中完成。
2. 设置子步数和时间步长:根据结构的特性和所需的精度,确定所需的子步数和时间步长。
子步数越多,模拟结果越精确,但计算时间也会增加。
时间步长则决定了子步之间的时间间隔。
需要根据结构的动态响应特性来选择合适的时间步长。
3. 定义收敛条件:为了使计算得到准确的结果,需要设置适当的收敛条件。
在每个子步中,ANSYS会计算结构的响应,并与指定的收敛条件进行比较。
如果未达到收敛条件,则继续迭代计算直到满足收敛要求。
载荷步则用于将模拟划分为多个时间段或加载阶段,以模拟结构在不同加载条件下的响应。
在每个载荷步中,ANSYS会根据所定义的加载条件进行计算,并输出相应的结果。
设置载荷步的方法如下:1. 定义不同的加载条件:在ANSYS中,首先需要定义不同的加载条件,如施加的力、位移或温度等。
这可以在ANSYS的预处理环境中完成。
2. 排列和定义载荷步:根据实际情况,将不同的加载条件按照顺序排列,并为每个载荷步设置开始时间和结束时间。
开始时间可以根据前一载荷步的结束时间来确定。
3. 运行模拟:在设置完所有的载荷步之后,可以运行模拟并获取相应的结果。
ansys载荷类型

ansys载荷类型在工程领域中,使用ANSYS软件进行有限元分析是一种常见的方法。
有限元分析是一种数值模拟技术,可以用于预测和评估结构或零件在各种载荷下的性能。
在ANSYS中,载荷类型是指施加在结构或零件上的外力或外部条件。
本文将介绍ANSYS中常见的载荷类型以及如何在模拟中使用它们。
1. 静态载荷静态载荷是指施加在结构或零件上的恒定外力。
在ANSYS中,可以通过以下几种方式施加静态载荷:1.1 点载荷点载荷是指作用在结构的一个点上的力或力矩。
在ANSYS中,可以通过在某个节点上施加一个力或力矩来模拟点载荷。
F, N, node_num, Fx, Fy, Fz其中,F表示施加力的命令,N表示施加的是力,node_num表示节点编号,Fx、Fy、Fz表示力的分量。
1.2 面载荷面载荷是指作用在结构的一个面上的分布载荷。
在ANSYS中,可以通过在面上定义一个载荷分布来模拟面载荷。
F, Fx, Fy, Fz, node1, node2, node3, ...其中,F表示施加力的命令,Fx、Fy、Fz表示力的分量,node1、node2、node3等表示构成面的节点。
1.3 线载荷线载荷是指作用在结构的一条线上的分布载荷。
在ANSYS中,可以通过在线上定义一个载荷分布来模拟线载荷。
F, Fx, Fy, Fz, line_num其中,F表示施加力的命令,Fx、Fy、Fz表示力的分量,line_num表示线的编号。
2. 动态载荷动态载荷是指随时间变化的外力。
在ANSYS中,可以通过以下几种方式施加动态载荷:2.1 正弦载荷正弦载荷是指随时间变化的正弦函数形式的载荷。
在ANSYS中,可以通过以下命令施加正弦载荷:D, LCID, TYPE, FREQ, T1, T2, F0, AMP其中,D表示施加动态载荷的命令,LCID表示载荷的编号,TYPE表示载荷类型,FREQ表示载荷频率,T1、T2表示载荷作用的时间段,F0表示载荷的初始值,AMP表示载荷的振幅。
ANSYS载荷施加解析
ansys载荷施加(2011-06-11 20:25:54)转载▼分类:ansys12.0学习教程标签:杂谈题目:加载2.1载荷概述有限元分析的主要目的是检查结构或构件对一定载荷条件的响应。
因此,在分析中指定合适的载荷条件是关键的一步。
在ANSYS程序中,可以用各种方式对模型加载,而且借助于载荷步选项,可以控制在求解中载荷如何使用。
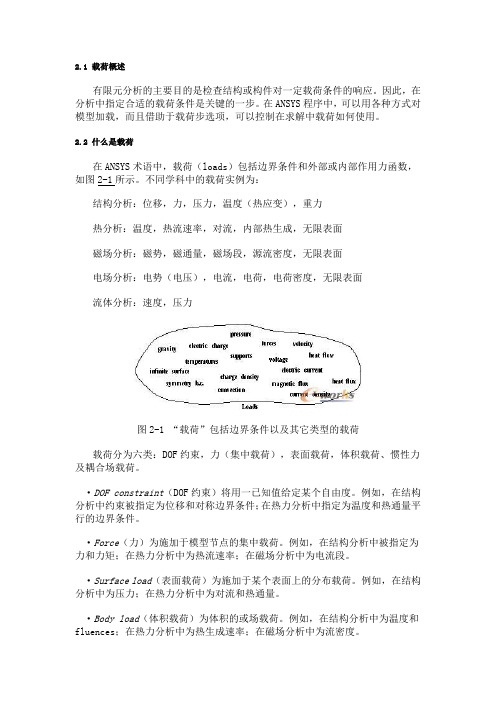
2.2什么是载荷在ANSYS术语中,载荷(loads)包括边界条件和外部或内部作用力函数,如图2-1所示。
不同学科中的载荷实例为:结构分析:位移,力,压力,温度(热应变),重力热分析:温度,热流速率,对流,内部热生成,无限表面磁场分析:磁势,磁通量,磁场段,源流密度,无限表面电场分析:电势(电压),电流,电荷,电荷密度,无限表面流体分析:速度,压力图2-1 “载荷”包括边界条件以及其它类型的载荷载荷分为六类:DOF约束,力(集中载荷),表面载荷,体积载荷、惯性力及耦合场载荷。
·DOF constraint(DOF约束)将用一已知值给定某个自由度。
例如,在结构分析中约束被指定为位移和对称边界条件;在热力分析中指定为温度和热通量平行的边界条件。
·Force(力)为施加于模型节点的集中载荷。
例如,在结构分析中被指定为力和力矩;在热力分析中为热流速率;在磁场分析中为电流段。
·Surface load(表面载荷)为施加于某个表面上的分布载荷。
例如,在结构分析中为压力;在热力分析中为对流和热通量。
·Body load(体积载荷)为体积的或场载荷。
例如,在结构分析中为温度和fluences;在热力分析中为热生成速率;在磁场分析中为流密度。
·Inertia loads(惯性载荷)由物体惯性引起的载荷,如重力加速度,角速度和角加速度。
主要在结构分析中使用。
·Coupled-field loads(耦合场载荷)为以上载荷的一种特殊情况,从一种分析得到的结果用作为另一分析的载荷。
ANSYSWorkbench中的几种载荷的含义

ANSYSWorkbench中的几种载荷的含义ANSYS Workbench 中的几种载荷的含义2010-10-29 22:03 字号:小大我要评论(0)1) 方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2) 加速度 (重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3) 旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > Control Panel >Miscellaneous > AngularVelocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4) 压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面 (例如压缩) ;负值代表从表面出来 (例如抽气等)–压力的单位为每个单位面积上力的大小5) 力载荷:–力可以施加在结构的最外面,边缘或者表面。
ANSYS讲义第10讲-多荷载步、荷载组合、预应力

Dec,2,2004
湖南大学土木学院 李立峰
L10-22
建立预应力模型的步骤
•
模拟预应力时,传统的方式是把预应力筋作为体积的边界,同时把混凝 土体积分割开来,边界作为Link、Beam单元,体可以采用块体单元 Solid65、Solid45进行模拟。 另一种方法:混凝土(Solid45)与预应力筋(Link180、初应力)分开 进行建模,但单元长度、结点位置尽量接近,然后用一下命令将两者粘 接在一起。 建立混凝土结点与力筋结点之间的约束关系-命令如下: CEINTF,0.25,UX,UY,UZ,,,,0, 这样可以保证两者共同工作。
L10-3
多荷载步的概念
• 在线性静态分析或稳态分析中,可以使用不同的荷载步对分析模 型施加不同的荷载组合; 在瞬态分析中,可以将荷载历程曲线不同区段的荷载用多个荷载 步表示,并施加在分析模型上。 在非线性分析中,每个荷载步又可以分成若干个子步,以达到保 证分析精度、保证计算分析收敛的目的。
•
•
Dec,2,2004
第十讲:
多荷载步、荷载工况及组合、预应力的模拟
Dec,2,2004
湖南大学土木学院 李立峰
L10-1
内容及目标
Part A. 多荷载步 Part B. 荷载组合 Part C. 预应力的模拟.
Dec,2,2004
湖南大学土木学院 李立峰
L10-2
Part A. 多荷载步
Dec,2,2004
湖南大学土木学院 李立峰
方法1:多步直接求解是在每个荷载步直接定义好之后,执行SOLVE命令。 典型的求解过程如下: ————————————
/Solu …… D,… F,… SOLVE !荷载步1的求解 D,… F,… SOLVE !荷载步2的求解 ——————————————
ansys载荷施加
2.1 载荷概述有限元分析的主要目的是检查结构或构件对一定载荷条件的响应。
因此,在分析中指定合适的载荷条件是关键的一步。
在ANSYS程序中,可以用各种方式对模型加载,而且借助于载荷步选项,可以控制在求解中载荷如何使用。
2.2 什么是载荷在ANSYS术语中,载荷(loads)包括边界条件和外部或内部作用力函数,如图2-1所示。
不同学科中的载荷实例为:结构分析:位移,力,压力,温度(热应变),重力热分析:温度,热流速率,对流,内部热生成,无限表面磁场分析:磁势,磁通量,磁场段,源流密度,无限表面电场分析:电势(电压),电流,电荷,电荷密度,无限表面流体分析:速度,压力图2-1 “载荷”包括边界条件以及其它类型的载荷载荷分为六类:DOF约束,力(集中载荷),表面载荷,体积载荷、惯性力及耦合场载荷。
·DOF constraint(DOF约束)将用一已知值给定某个自由度。
例如,在结构分析中约束被指定为位移和对称边界条件;在热力分析中指定为温度和热通量平行的边界条件。
·Force(力)为施加于模型节点的集中载荷。
例如,在结构分析中被指定为力和力矩;在热力分析中为热流速率;在磁场分析中为电流段。
·Surface load(表面载荷)为施加于某个表面上的分布载荷。
例如,在结构分析中为压力;在热力分析中为对流和热通量。
·Body load(体积载荷)为体积的或场载荷。
例如,在结构分析中为温度和fluences;在热力分析中为热生成速率;在磁场分析中为流密度。
·Inertia loads(惯性载荷)由物体惯性引起的载荷,如重力加速度,角速度和角加速度。
主要在结构分析中使用。
·Coupled-field loads(耦合场载荷)为以上载荷的一种特殊情况,从一种分析得到的结果用作为另一分析的载荷。
例如,可施加磁场分析中计算出的磁力作为结构分析中的力载荷。
其它与载荷有关的术语的定义在下文中出现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.荷载步中荷载的处理方式无论是线性分析或非线性分析处理方式是一样的。
①对施加在几何模型上的荷载(如fk,sfa 等):到当前荷载步所保留的荷载都有效。
如果前面荷载步某个自由度处有荷载,而本步又在此自由度处施加了荷载,则后面的替代前面的;如果不是在同一自由度处施加的荷载,则施加的所有荷载都在本步有效(删除除外!)。
②对施加在有限元模型上的荷载(如f,sf,sfe,sfbeam 等):ansys缺省的荷载处理是替代方式,可用fcum,sfcum 命令修改,可选择三种方式:替代(repl)、累加(add)、忽略(igno)。
当采用缺省时,对于同一自由度处的荷载,后面施加的荷载替代了前面施加的荷载(或覆盖);而对于不是同一自由度的荷载(包括集中或分布荷载),前面的和本步的都有效。
当采用累加方式时,施加的所有荷载都在本步有效。
特别注意的是,fcum 只对在有限元模型上施加的荷载有效。
2.线性分析的荷载步从荷载步文件(file.snn)中可以看到,本步的约束条件和荷载情况,而其处理与上述是相同的。
由于线性分析叠加原理是成立的,或者讲每步计算是以结构的初始构形为基础的,因此似乎可有两种理解。
①每个荷载步都是独立的:你可以根据你本步的约束和荷载直接求解(荷载步是可以任意求解的,例如可以直接求解第二个荷载步,而不理睬第一个荷载步:lssolve,2,2,1),其结构对应的是你的约束和荷载情况,与前后荷载步均无关!(事实上,你本步可能施加了一点荷载,而前步的荷载继续有效,形成你本步的荷载情况)②后续荷载步是在前步的基础上计算的(形式上!)。
以荷载的施加先后出发,由于本步没有删除前面荷载步的荷载,你在本步仅仅施加了一部分荷载, 而结构效应是前后荷载共同作用的结果。
不管你怎样理解,但计算结果是一样的。
(Ansys是怎样求解的,得不到证实。
是每次对每个荷载步进行求解,即[K]不变,而[P]是变化的,且[P]对应该荷载步的所有荷载向量呢?或是[P]对应一个增量呢?不用去管他,反正结果一样) 也有先生问,想在第N 步的位移和应力的基础上,施加第N+1 步的荷载,如何?对线性分析是没有必要的,一是线性分析的效应是可以叠加的,二是变形很小(变形大时不能采用线性分析)。
总之,线性分析是可以理解为后续步是在前步的基础上计算的(当然都基于初始构形)。
3.非线性分析时的荷载步如下两点是要明确的:①对于保守系统(无能量耗散),最后结果与荷载的施加顺序(或荷载历史、或加载路径)无关。
②后续荷载步计算是在前步的基础上(以前步的构形和应力为基础)计算的。
关于①:设置荷载步,并顺序求解;设置荷载步,直接求解荷载步 2;不用荷载步,直接同时施加所有荷载;使用重启动,不设荷载步,顺序求解;使用生死单元等方法,其求解结果相同。
通过计算证明了荷载顺序不影响最终结果,从这里也证明了保守系统的计算结果与荷载路径无关。
关于②:虽然从file.snn 比较看,除了非线性分析的设置外,几乎与线性分析的荷载步文件没有什么差别,但如果顺序求解,则后续荷载步中用于每个子步计算的荷载=前步荷载不变+本步新施加的荷载按子步内插值。
而不是在本步有效的所有荷载点点施加。
举例1:重力和预应力分为两个荷载步,在求预应力作用时,重力不变,而将预应力按子步要求施加;所以这样计算即为考虑了重力的先作用,而预应力则在重力作用的基础上计算的。
即第二荷载步中的每个子步所对应的荷载=重力+预应力总荷载/nsubst,而不是=(重力+预应力总荷载)/nsubst.举例2:设一悬臂梁,先在1/2 处作用2000 为第一荷载步,且设nsubst=10,time=1;然后悬臂端再作用3000,且nsubst=20,time=2,为第二荷载步。
顺序求解,则3000 即在2000 先作用的基础上计算的,即当time=1.6 时,这时子步的荷载=2000+3000/20*(1.6-1.0)*20=3800,而不是(2000+3000) *0.6=3000。
但小弟还有一点疑问,“对于保守系统(无能量耗散),最后结果与荷载的施加顺序(或荷载历史、或加载路径)无关”,几乎所有的书上都是这么说的。
就结构工程上而言,如果在小变形、弹性状态下,那么没有疑问,确实如此!但如果在大变形的情况下(即使仍在弹性状态)呢?最后结果还与加载顺序无关吗?小弟捉摸不定!比如一根刚性杆左端铰接并加转动弹簧约束,现在有一个来在支座左上方的拉力和一个垂直向下的压力作用在右端,拉力较小,压力很大。
分两种加载次序:1)如果拉力先作用,拉动弹簧逆时针转动了90 度以上,然后压力作用,如果不改变压力的作用点,则杆躲过了压力的作用。
拉杆保持那个大于90 度的角度。
(如果让压力的作用跟随右端点位置的变化,ansys好像是这样做的,这样同下一个加载顺序2)比改变了加载条件,姑且也讨论一下:这样弹簧会继续转动,最终右端转到左端。
)2)压力先作用,然后拉力作用。
由于压力很大,拉力较小,杆件几乎不会转动,保持原位。
这个例子无疑是一个保守系统,机械能没有耗散!但由于加载顺序不同,就出现了最终位形的大大不同。
这是不是说如果出现了大变形,即使是在保守系统中,加载顺序是会影响最终的作用结果呢?1.你的问题不是杠题,是很好的问题!实际上你说的那种情形不对,例如先斜拉,则转动过90 度,然后施压,要注意在施压时必定先抵消你的向上的拉,则结构应该回来了,故不会出现仍大于90 度的状态。
所以与你先施压的效果是一样的。
如果我理解的不对,请你将图放上来讨论。
2.下面是一个悬臂梁的问题,有点类似于你的问题。
即先用M 将其转动大于90 度,然后施加向下的荷载,其最后结果与加载路径无关。
下面是简图和命令流。
3.对于非线性分析(保守系统),因为分析是建立在结构变形后基础上的,其荷载的作用会随构形不同而变化,但最终的平衡位置是惟一的。
越跃失稳在极值点是临界的,大于极值点越跃到另外的平衡位置,小于则在越跃前的平衡位置。
因我不属于力学高手,有些问题可能说的不够准确,见谅。
finish/clearl0=1000b0=10h0=20/prep7k,1k,2,l0l,1,2et,1,beam3mp,ex,1,2.0e5mp,prxy,1,0.3r,1,b0*h0,b0*h0*h0*h0/12,h0lesize,all,,,20lmesh,alldk,1,all/soluoutres,all,allnlgeom,onautots,offtime,1nsubst,10fk,2,mz,5000000lswrite,1time,2fk,2,fy,-3000nsubst,20lswrite,2lssolve,1,2,1finish/post11.保守系统和非保守系统:如果输入系统的总能量在载荷移去后复原,则为保守系统;如果能量被系统消耗,则是非保守系统。
一个保守系统的分析是与过程无关的。
(In help: If all energy put into a system by external loads is recovered when the loads are removed, the system is said to be conservative. If energy is dissipated by the system, the system is said to be nonconservative. An analysis of a conservative system is path independent.) 也就是说,不论过去的历史如何,只要积累到当前的变形,结构应力相同;并且在卸载后,结构将恢复到初始状态。
考虑到弹性的定义,故对于弹性(线弹和非线弹)分析结构的最终变形和应力与加载次序无关。
而几何非线性属于弹性范围,是故也是一样的。
2.对于真诚先生“打绳结”问题,次序对结果确是有影响的。
但打结后是不能自动恢复的,恐怕这个例子不属于保守系统的范围。
似乎是拓扑问题,而不是结构分析问题,呵呵。
3. 真诚先生“ANSYS可以用重启动来实现无论是静力还是动力的增量分析”一句,也对,是可以用该方法实现增量分析,但似乎重启动的真正目的不在此。
因为ansys荷载步的分析就能实现“增量分析”,却为何用重启动呢?疑有杀鸡用宰牛刀之嫌。
所以我还是认为“保守系统的最终结果与加载历史无关”,并且“后续荷载步计算是在前步的基础上计算的”。
如有不当,请继续指正!1.荷载步中的荷载处理方式如上,同一自由度处的荷载(包括荷载作用点和方向呀)可替代、累加等。
2.后续荷载步是在前荷载步的基础上进行计算的,而不仅仅是荷载子步,从上述举例中可以看出来。
现在看你的例子,假如就是替代方式的50 和100,不管你在荷载步文件中看到是什么,则求解时第二荷载步时,50 是基础,即其后的每个子步是50+(100-50)划分的增量。
To wendy:1.对仅仅是约束不断变化的结构,其求解使用简单的荷载步是不能解决的;2.使用初应力也不理想,因为施加上初应力后变形不符或变形相符但应力又不符了;对于结构不变而改变约束和荷载的处理,建议如下:1.不使用荷载步,使用系列solve 求解,并且通过time 识别,且不要离开solu 层;2.当你计算完第一工况后,删除原有部分约束(保证结构几何不变),将原有部分约束处的反力施加在结构上(通过*get 得到),求解之;3.增加新的约束,施加新的荷载,求解之;4.最后通过post1 得到结果,则每个time 整时,就是当前的累加效应。
上述对于线性分析和非线性分析都是可行的。
当然对于线性分析因为叠加原理可用,可采用多种方法实现这种分析,例如可各自独立求解,然后叠加,或用荷载工况处理等。
其他: 1.通过荷载步、初应力、restart 等简单的做法(指不处理约束反力等)是不行的; 2.对新帖的内容不甚明白,故无法解释。
VOFFST。