ansys载荷步
ANSYS中多载荷步求解的三种方法

ANSYS中多载荷步求解的三种⽅法⼀.载荷步的含义⼀个载荷步是指边界条件和载荷选项的⼀次设置,⽤户可对此进⾏⼀次或多次求解。
⼀个分析过程可以包括:1.单⼀载荷步(常常这是⾜够的)2.多重载荷步有三种⽅法可以⽤来定义并求解多载荷步1.多次求解⽅法2.载荷步⽂件⽅法3.向量参数⽅法⼆.多次求解⽅法介绍多次求解⽅法是三种⽅法中最易理解的⽅法缺点:⽤户必须等到每⼀次求解完成后才能定义下⼀次载荷步(除⾮使⽤批处理⽅法)注意:只有在不离开求解过程时,此⽅法才有效。
否则,必须指⽰程序进⾏重启动为了使⽤多次求解⽅法:1.定义第⼀个载荷步并存盘2.进⾏求解3.不要退出求解器,按需要为第⼆次求解改变载荷步并存盘4.进⾏求解5.不要退出求解器,继续进⾏步骤3和步骤4直到所有的载荷步完成6.进⾏后处理三.载荷步⽂件⽅法介绍当⽤户想离开计算机时,使⽤此⽅法求解多重载荷步是很⽅便的程序将每个载荷步写到⼀个载荷步⽂件,此⽂件名为jobname.sxx(sxx 为载荷步号),然后使⽤⼀条命令,读进每个载荷步⽂件并开始求解为了使⽤载荷步⽂件⽅法:1.定义第⼀个载荷步2.将边界条件写进⽂件Main Menu: Solution >-Load Step Opts- Write LS File (jobname.sxx)…3.为了进⾏第⼆次求解按需要改变载荷条件4.将边界条件写到第⼆个⽂件5.利⽤载荷步⽂件进⾏求解Main Menu: Solution > -Solve- From LS Files (jobname.sxx)…四.向量参数⽅法介绍主要⽤于瞬态和⾮线性稳-静态分析。
使⽤向量参数和循环语句来定义⼀个载荷随时间变化的表*DO,FYVAL,1,10,1 *DIM,LOADVALS,,5F,1,FY,FYVAL LOADVALS(1)=1,2,3,5,7SOLVE *DO,II,1,5,1*ENDDO F,1,FY,LOADVALS(II)SOLVE*ENDDO五.使⽤重启动⽣成多重载荷步使⽤重启动可能不可靠,因此推荐使⽤多次求解⽅法来求解⼀个载荷步。
ansys基本过程手册
ANSYS使用手册第1章开始使用ANSYS1.1完成典型的ANSYS分析ANSYS软件具有多种有限元分析的能力,包括从简单线性静态分析到复杂的非线性瞬态动力学分析。
在ANSYS分析指南手册中有关于它开展不同工程应用领域分析的具体过程。
本章下面几节中描述了对绝大多数分析皆适用的一般步骤。
一个典型的ANSYS分析过程可分为三个步骤:●建立模型●加载并求解●查看分析结果1.2建立模型与其他分析步骤相比,建立有限元模型需要花费ANSYS用户更多时间。
首先必须指定作业名和分析标题,然后使用PREP7前处理器定义单元类型、单元实常数、材料特性和几何模型。
1.2.1 指定作业名和分析标题该项工作不是强制要求的,但ANSYS推荐使用作业名和分析标题。
1.2.1.1定义作业名作业名是用来识别ANSYS作业。
当为某项分析定义了作业名,作业名就成为分析过程中产生的所有文件名的第一部分(文件名)。
(这些文件的扩展名是文件类型的标识,如.DB)通过为每一次分析给定作业名,可确保文件不被覆盖。
如果没有指定作业名,所有文件的文件名均为FILE或file(取决于所使用的操作系统)。
可按下面方法改变作业名。
●进入ANSYS程序时通过入口选项修改作业名。
可通过启动器或ANSYS执行命令。
详见ANSYS 操作指南。
●进入ANSYS程序后,可通过如下方法实现:命令行方式:/FILENAMEGUI:Utility Menu>File>Change Jobname/FILENAME命令仅在Begin level(开始级)才有效,即使在入口选项中给定了作业名,ANSYS 仍允许改变作业名。
然而该作业名仅适用于使用/FILNAME后打开的文件。
使用/FILNAME命令前打开的文件,如记录文件Jobname.LOG、出错文件Jobname.ERR等仍然是原来的作业名。
1.2.1.2 定义分析标题/TITLE命令(Utility Menu>File>Change Title)可用来定义分析标题。
ANSYS Workbench 后处理

一、前处理技术
1.2.2 约束类型 固定约束(Fixed Support)——
固定约束可以加载于实体、顶点、边缘、面、 壳或者梁上,从而约束相对应单元的自由度。
一、前处理技术
1.2.2 约束类型 位移约束(Displacement)——
在加载给定位移时要注意: -可以在顶点、体边缘或面上加载已知位移 -允许在x、y和z方向给予强制位移 -当输入“0”值时,代表此方向上被约束 -如果不设定某个方向的值则意味着实体在这个方向上自由运动
是通过惯性力施加到结构上的,而惯性力的方向
与所施加的加速度方向恰好相反,因为惯性力是
阻止加速度所产生的变化的,一定要牢记这一
点!!! 通过鼠标选中
来定义加速度
通过鼠标选中 球重力加速度
通过鼠标选中 ,注意缺省单位为rad/s
来定义标准地 来定义旋转速度
一、前处理技术
1.2.1 载荷类型
➢ 结构载荷(Inertial) 是作用在系统或部件结构上的力或力矩。力载
Selection 图标 –新的命名集将出现在Outline Tree(大纲树)下。
•提示: –在一个指定的命名选择集里只允许出现一种实体类型。例如,在相同的命 名集里就不能同时出现点和边。
一、前处理技术
附: 命名选择集
•在很多细节窗口中可以直接引用命名选择集: •示例(压载荷):
–在Details of Pressure中,把Method由Geometry Selection换成 Named Selection
(1)双击项目A中的A2栏Engineering Data项,进入下图所示 的材料参数设置界面,在该界面下即可进行材料参数设置。
一、前处理技术
添加材料库
ansys中子步和载荷步的含义与设置方法
在Ansys中,子步和载荷步是非常重要的概念,对于进行复杂仿真分析的工程师来说,深入理解并正确设置子步和载荷步是非常关键的。
接下来,我将从深度和广度的角度,结合自己的理解和经验,详细解释这两个概念的含义和设置方法。
1. 子步的含义与设置方法让我们来理解什么是子步。
在Ansys中,子步是为了确保仿真收敛而进行的时间步长分割。
当仿真过程中存在非线性行为或者材料模型的非线性影响较大时,我们就需要使用子步来有效地控制仿真的精度和稳定性。
在设置子步时,首先需要考虑仿真的时间范围,并根据具体情况进行合理的分割。
一般来说,我们可以根据仿真模型的非线性程度和材料特性来确定子步的数量和大小。
对于高度非线性的模型,需要细分子步以确保仿真的准确性;而对于较为线性的模型,则可以适当减少子步以提高仿真效率。
在设置子步时,还需要考虑到各个载荷的作用情况,以确保在每个子步内能够充分考虑不同载荷的影响。
通过合理设置子步,可以有效地控制仿真的收敛性,并且提高仿真结果的准确性。
2. 载荷步的含义与设置方法载荷步是指在Ansys中对载荷进行分段加载的方法。
在工程仿真中,往往会面对需要分段加载的情况,这时就需要使用载荷步来对载荷进行合理分段,并进行逐步加载以观察结构的响应。
在设置载荷步时,首先需要考虑加载的类型和大小,然后根据具体的分析目的来确定载荷的分段情况。
通常情况下,我们可以根据结构的承载能力和材料的特性来确定载荷的分段加载,并且可以根据仿真的结果来调整载荷步的设置,以得到更加准确的分析结果。
总结和回顾通过对子步和载荷步的含义和设置方法的详细解释,我们可以看到,在Ansys中合理设置子步和载荷步对于确保仿真的准确性和稳定性是非常重要的。
通过合理分割子步和载荷,我们可以更好地控制仿真的收敛性和精度,并且可以更加准确地模拟结构的响应情况。
个人观点和理解在我的实际工程仿真经验中,我发现合理设置子步和载荷步可以大大提高仿真的精度和效率。
ANSYS求解过程中的载荷、约束与边界条件的设定
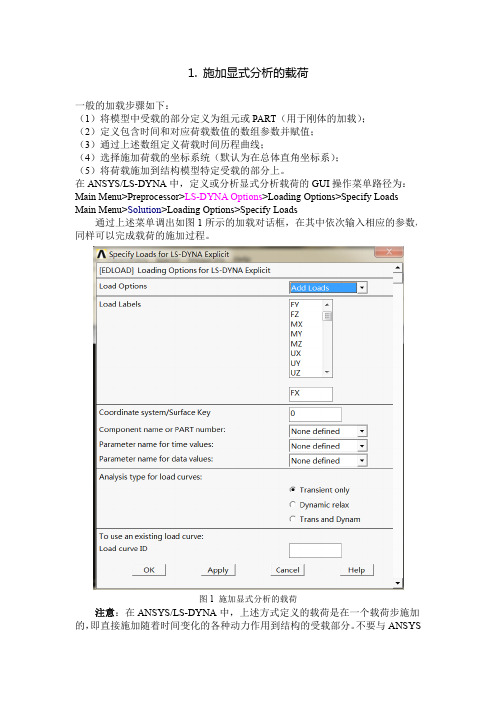
1.施加显式分析的载荷一般的加载步骤如下:(1)将模型中受载的部分定义为组元或PART(用于刚体的加载);(2)定义包含时间和对应荷载数值的数组参数并赋值;(3)通过上述数组定义荷载时间历程曲线;(4)选择施加荷载的坐标系统(默认为在总体直角坐标系);(5)将荷载施加到结构模型特定受载的部分上。
在ANSYS/LS-DYNA中,定义或分析显式分析载荷的GUI操作菜单路径为:Main Menu>Preprocessor>LS-DYNA Options>Loading Options>Specify Loads Main Menu>Solution>Loading Options>Specify Loads通过上述菜单调出如图1所示的加载对话框,在其中依次输入相应的参数,同样可以完成载荷的施加过程。
图1施加显式分析的载荷注意:在ANSYS/LS-DYNA中,上述方式定义的载荷是在一个载荷步施加的,即直接施加随着时间变化的各种动力作用到结构的受载部分。
不要与ANSYS隐式结构分析中多个载荷步加载的概念相混淆。
施加了显式分析载荷之后,可以通过操作显示或隐藏载荷标志,其GUI菜单操作路径为:Main Menu>Preprocessor>LS-DYNA Options>Loading Options>Show Forces2.施加初始条件在瞬态动力问题中,经常需要定义结构系统的初始状态,如初始速度等。
在ANSYS/LS-DYNA程序中,菜单路径为:Main Menu>Preprocessor>LS-DYNA Options>Initial Velocity>OnNodes/PARTsMain Menu>Solution>Initial Velocity>On Nodes/PARTs图2施加于PART上初始速度3.施加边界条件在ANSYS/LS-DYNA中,可以定义如下一些类型的边界条件:★固定边界条件其菜单操作路径为:Main Menu>Preprocessor>LS-DYNA Options>Constraints>Apply>On Nodes Main Menu>Solution>Constraints>Apply>On Nodes在图形窗口中单击需要约束的节点,然后,在弹出的如图3所示的对话框中进行施加零约束的操作。
ANSYS新手入门手册(完整版)超值上
ANSYS 基本分析过程指南目录第 1 章开始使用 ANSYS1.1 完成典型的 ANSYS 分析1.2 建立模型第2章加载2.1 载荷概述2.2 什么是载荷2.3 载荷步、子步和平衡迭代2.4 跟踪中时间的作用2.5 阶跃载荷与坡道载荷2.6 如何加载2.7 如何指定载荷步选项2.8 创建多载荷步文件2.9 定义接头固定处预拉伸第 3 章求解3.1 什么是求解3.2 选择求解器3.3 使用波前求解器3.4 使用稀疏阵直接解法求解器3.5 使用雅可比共轭梯度法求解器(JCG)3.6 使用不完全乔列斯基共轭梯度法求解器(ICCG)3.7 使用预条件共轭梯度法求解器(PCG)3.8 使用代数多栅求解器(AMG)3.9 使用分布式求解器(DDS)3.10 自动迭代(快速)求解器选项3.11 在某些类型结构分析使用特殊求解控制3.12 使用 PGR 文件存储后处理数据3.13 获得解答3.14 求解多载荷步3.15 中断正在运行的作业3.16 重新启动一个分析3.17 实施部分求解步3.18 估计运行时间和文件大小111 2323 23 24 25 26 27 6877 788584 84 85 86 86 86 86 87 8888 89 92 9697 100 100 111 1133.19 奇异解第 4 章后处理概述4.1 什么是后处理4.2 结果文件4.3 后处理可用的数据类型第5章5.1 概述5.2 将数据结果读入数据库5.3 在 POST1 中观察结果5.4 在 POST1 中使用 PGR 文件5.5 POST1 的其他后处理内容第 6 章时间历程后处理器(POST26)6.1 时间历程变量观察器6.2 进入时间历程处理器6.3 6.4 6.5 6.6 6.7定义变量处理变量并进行计算数据的输入数据的输出变量的评价通用后处理器(POST1)1141161161171171181181181271521601741741761771791811831841871901901901941956.8 POST26 后处理器的其它功能第 7 章选择和组件7.1 什么是选择7.2 选择实体7.3 为有意义的后处理选择7.4 将几何项目组集成部件与组件第 8 章图形使用入门8.1 概述8.2 交互式图形与“外部”图形8.3 标识图形设备名(UNIX 系统)8.4 指定图形显示设备的类型(WINDOWS 系统)198198 198 198 2018.5 与系统相关的图形信息8.6 产生图形显示8.7 多重绘图技术第 9 章通用图形规范9.1 概述9.2 用 GUI 控制显示9.3 多个 ANSYS 窗口,叠加显示9.4 改变观察角、缩放及平移9.5 控制各种文本和符号9.6 图形规范杂项9.7 3D 输入设备支持第 10 章增强型图形10.1 图形显示的两种方法10.2 POWERGRAPHICS 的特性10.3 何时用 POWERGRAPHICS10.4 激活和关闭 POWERGRAPHICS10.5 怎样使用 POWERGRAPHICS10.6 希望从 POWERGRAPHICS 绘图中做什么第 11 章创建几何显示11.1 用 GUI 显示几何体11.2 创建实体模型实体的显示11.3 改变几何显示的说明第 12 章创建几何模型结果显示12.1 利用 GUI 来显示几何模型结果12.2 创建结果的几何显示12.3 改变 POST1 结果显示规范12.4 Q-SLICE 技术12.5 等值面技术12.6 控制粒子流或带电粒子的轨迹显示202 205 207210210 210 210 211 214 217 218219219 219 219 220 220 220223223 223 224233233 233 235 238 238 239第 13 章生成图形24013.1 使用 GUI 生成及控制图13.2 图形显示动作13.3 改变图形显示指定第 14 章注释注释概述二维注释为 ANSYS 模型生成注释三维注释三维查询注释240 240 24124514.1 14.2 14.3 14.4 14.5245 245 246 246 247第 15 章动15.1 动画概述画24824824824824924925025115.2 在 ANSYS 中生成动画显示15.3 使用基本的动画命令15.4 使用单步动画宏15.5 离线捕捉动画显示图形序列15.6 独立的动画程序15.7 WINDOWS 环境中的动画第 16 章外部图形25316.1 外部图形概述16.2 生成中性图形文件16.3 DISPLAY 程序观察及转换中性图形文件16.4 获得硬拷贝图形第 17 章报告生成器17.1 启动报告生成器17.2 抓取图象17.3 捕捉动画17.4 获得数据表格17.5 获取列表17.6 生成报告253 254 255 258259259 260 260 261 264 26417.7 报告生成器的默认设置第 18 章 CMAP 程序18.1 CMAP 概述18.2 作为独立程序启动 CMAP 18.3 在 ANSYS 内部使用 CMAP 18.4 用户化彩色图第 19 章文件和文件管理267 269269 269 271 27127419.1 文件管理概述19.2 更改缺省文件名19.3 将输出送到屏幕、文件或屏幕及文件19.4 文本文件及二进制文件19.5 将自己的文件读入 ANSYS 程序19.6 在 ANSYS 程序中写自己的 ANSYS 文件19.7 分配不同的文件名19.8 观察二进制文件内容(AXU2)19.9 在结果文件上的操作(AUX3)19.10 其它文件管理命令第 20 章内存管理与配置20.1 内存管理20.2 基本概念20.3 怎样及何时进行内存管理20.4 配置文件274274 275 275 278 279 280280 280280 282282 282 283 286第1章开始使用 ANSYS1.1 完成典型的 ANSYS 分析ANSYS 软件具有多种有限元分析的能力,包括从简单线性静态分析到复杂的非线性瞬态动力学分析。
ansys中子步和载荷步的含义与设置方法
ansys中子步和载荷步的含义与设置方法在ANSYS中,子步和载荷步是用于模拟复杂工程问题的重要概念。
子步(Substep)是为了更精确地捕捉结构在非线性或动态情况下的行为而引入的一个概念。
而载荷步(Load Step)是将模拟分为多个连续的时间段或加载阶段,以模拟结构在不同加载条件下的响应。
子步是在每个载荷步中进一步细化时间,将一个载荷步划分为多个小的时间间隔。
这样做的目的是为了更准确地模拟结构在非线性或动态情况下的行为。
在每个子步中,ANSYS会根据结构的当前状态进行计算,然后根据所设定的子步数和时间步长进行迭代计算,直到达到收敛条件。
设置子步的方法主要包括以下几个步骤:1. 定义载荷步:在ANSYS中,首先需要定义每个载荷步所需的加载条件,如施加的力、位移或温度等。
这可以在ANSYS的预处理环境中完成。
2. 设置子步数和时间步长:根据结构的特性和所需的精度,确定所需的子步数和时间步长。
子步数越多,模拟结果越精确,但计算时间也会增加。
时间步长则决定了子步之间的时间间隔。
需要根据结构的动态响应特性来选择合适的时间步长。
3. 定义收敛条件:为了使计算得到准确的结果,需要设置适当的收敛条件。
在每个子步中,ANSYS会计算结构的响应,并与指定的收敛条件进行比较。
如果未达到收敛条件,则继续迭代计算直到满足收敛要求。
载荷步则用于将模拟划分为多个时间段或加载阶段,以模拟结构在不同加载条件下的响应。
在每个载荷步中,ANSYS会根据所定义的加载条件进行计算,并输出相应的结果。
设置载荷步的方法如下:1. 定义不同的加载条件:在ANSYS中,首先需要定义不同的加载条件,如施加的力、位移或温度等。
这可以在ANSYS的预处理环境中完成。
2. 排列和定义载荷步:根据实际情况,将不同的加载条件按照顺序排列,并为每个载荷步设置开始时间和结束时间。
开始时间可以根据前一载荷步的结束时间来确定。
3. 运行模拟:在设置完所有的载荷步之后,可以运行模拟并获取相应的结果。
ansys瞬态热分析教程及实例
大家好
QUST
18
自动时间步长选项 命令:AUTOTS GUI:Main Menu > Solution > Analysis Type
> Sol'n Controls 打开后求解过程中将自动调整时间步长。
大家好
QUST
19
时间积分选项 命令:TIMINT GUI:Main Menu > Solution > Load Step
QUST
6
大家好
5. 瞬态传热分析
均匀初始温度:如果整个模
型的初始温度为均匀且非0
2
,使用下列菜单指定:
3 4 1
QUST
7
大家好
1
2 3
5. 瞬态传热分析
非均匀的初始温度
如果模型的初始温度分布
已知但不均匀,使用这些
菜单将初始条件施加在特
4
定节点上
5
QUST
8
大家好
5. 瞬态传热分析
ANSYS 瞬态传热分析的主要步骤 1.建立有限元模型 2.施加载荷并求解 3.求解 4.查看分析结果
QUST
5
大家好
5. 瞬态传热分析
在瞬态分析中,载荷步和子步的定义与非线性稳态分 析十分类似。载荷定义的每个载荷步的终点,并可以 随时间阶跃或渐进的施加。
每个载荷步的求解是在子步上得到。子步长根据时间 积分步长得到。
自动时间步 (ATS) 同样适用于瞬态分析,可以简化 ITS选择。 ITS选择将影响到瞬态分析的精度和非线性收敛性 (如果存在)。
Restart
大家好
QUST
10条件分为两种情况:其一, 初始温度场已知;其二,初始温度场未知。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实际工况=载荷步(时间步)+载荷步(时间步)+......载荷步=载荷子步(时间增量)+载荷子步(时间增量)+......实体加载和有限元模型加载的区别:实体加载是不能利用叠加,所以实体加载要手工叠加。
对实体是覆盖,有限元模型加载是可以设置的。
有限元加载可以利用fcum进行叠加。
比如,第一个荷载步,对关键点1施加10kn,第二荷载步也对关键点1施加10kn,则这两个荷载步结果是完全一致的。
第一个荷载步,对节点1施加10kn,第二荷载步也对节点1施加10kn,而且用命令fcum,add则第二荷载步是20kn的结果。
加载与载荷步、子步及平衡迭代次数的说明加载与载荷步、子步及平衡迭代次数的说明:一、加载方式的区别实体加载和有限元模型加载的区别:实体加载是不能利用叠加,所以实体加载要手工叠加。
对实体是覆盖,有限元模型加载是可以设置的。
有限元加载可以利用fcum进行叠加。
比如,第一个荷载步,对关键点1施加10kn,第二荷载步也对关键点1施加10kn,则这两个荷载步结果是完全一致的。
第一个荷载步,对节点1施加10kn,第二荷载步也对节点1施加10kn,而且用命令fcum,add则第二荷载步是20kn的结果。
实体加载方法的优点:a、几何模型加载独立于有限元网格,重新划分网格或局部网格修改不影响载荷;b、加载的操作更加容易,尤其是在图形中直接拾取时;无论采取何种加载方式,ANSYS求解前都将载荷转化到有限元模型,因此加载到实体的载荷将自动转化到其所属的节点或单元上;二、载荷步及子步这些概念主要用于非线性分析或载荷随时间变化的问题。
根据问题的特点,可以将加载过程分为几个阶段进行,每一个阶段则作为一个载荷步。
比如做弹塑性分析时,可以通过试算初步估计开始屈服时的载荷,作为第一步,后续载荷作为第二步,等。
为了保证计算过程的收敛和结果精度 (特别是在非线性分析时),往往把一个载荷步又划分为若干子步,每个子步施加的载荷为该子步步长和整个载荷步长之比乘以该载荷步的载荷增量值。
子步数太多,计算时间会很长;子步数太少,会导致计算不收敛,因此软件要求用户根据问题的特点,平衡计算时间和收敛性 (计算精度),设置最大和最小子步数,当软件判断计算不收敛时,会减小步长 (增加子步数),若软件判断收敛精度足够时,会增大步长 (减小子步数),但均以用户设置为界限。
这涉及到叠代问题,一般不都是用牛顿-拉普森方法吗?和求积分一个道理,你划分的区间越多,求的结果越真实.1、载荷载步一般荷载步只在两种分析中用到:静力分析和瞬态分析。
在静力分析中,荷载步中可以包含子步。
比如:一个载荷分为1000个荷载步来加载,其中每个荷载步都只有1个子步,另一种方式是1个荷载步,1000个子步,相信第二种的计算时间要少很多.时间步长在静力分析和瞬态分析中得区别:静力分析中时间的概念是虚,只要实现荷载步就行了,所以这里的荷载步的概念就主要是荷载的问题。
瞬态分析通常是很多荷载步,在和时间有关系的分析中,time的值就是表示真实的时间值。
荷载步中还有一个设置,那就是kbc,0(渐变),kbc,1(阶跃):比如第一荷载步对节点1施加了10KN,采用的是渐变荷载,第二荷载步对节点1又施加了10KN,且fcum,add,则在1.6s时的结果就是这个荷载10+10*0.6=16KN 对应的结果。
如果是阶跃,1.6s应该是10+10=20KN。
2、子步子步是指在一个特定的载荷步中每一次增加的步长,也称为时间步。
对于不同的分析类型,子步的作用不同:在非线性静态分析或稳态分析中,使用子步逐渐施加载荷以便能获得精确解;在线性或非线性瞬态分析或稳态分析中,使用子步满足瞬态时间积分法则(为获得精确解,通常规定一个最小的时间步长);在谐波分析中,使用子步可获得谐波频率范围内多个频率处的解。
3、平衡迭代平衡迭代是指在给定子步下为了收敛而计算的附加解。
平衡迭代仅应用于收敛起着重要作用的非线性(静态或瞬态)中的迭代修正。
如果平衡迭代的次数超过这个数还不收敛,就会二分子步。
如果数次二分后,子步数超过最大子步数,那么求解就会失败!/PREP7ET,1,PLANE182MP,KXX,1,60.5MP,c,1,470MP,DENS,1,7850MP,ALPX,1,0.000012MP,EX,1,200000000000MP,PRXY,1,0.3RECTNG,0,1,0,1,ESIZE,0,10,MSHAPE,0,2DMSHKEY,0amesh,all/soluANTYPE,4TRNOPT,FULLLUMPM,0nsel,s,loc,y,0D,all,,,,,,ALL,,,,,allselF,node(0,1,0),FY,-100NSUBST,5,10,1TIME,1LSWRITE,1,allselNSUBST,2,5,1TIME,3F,node(1,1,0),FY,-100LSWRITE,2,allselLSSOLVE,1,2,1,1、非线性分析(1)牛顿-拉普森选项(NROPT)仅在非线性分析中使用这个选项,。
这个选项制定在求解期间每隔多长时间修正一次正切矩阵。
可以指定下列值中的一个:程序选择(NROPT,AUTO)。
程序根据模型中存在的非线性种类自动选用这些选项中的一个。
在需要时牛顿-拉普森方法将自动激活自适应下降。
完全牛顿-拉普森选项(NROPT,FULL)。
程序使用完全的牛顿-拉普森处理方法,在这种处理方法中每进行一次平衡迭代都修改刚度矩阵一次。
如果自适应下降是关闭的,程序每一次平衡迭代都使用正切刚度矩阵。
如果自适应下降是打开的,只要迭代保持稳定,程序仅适用正切刚度矩阵。
如果在某一次迭代过程中检测到发散倾向,程序将抛弃发散的迭代并重新开始求解,此时应用正切和正割刚度矩阵的加权组合。
当迭代重新回到收敛模式是程序将重新开始使用正切刚度矩阵。
对复杂的非线性问题自适应下降统称能提高程序获得收敛的能力。
修正牛顿-拉普森选项(NROPT,MODL)。
程序使用修正的牛顿-拉普森方法,在这种方法中正切刚度矩阵在每一步中都被修正,在一个子步的平衡迭代期间矩阵不被改变。
这个选项不适应于大变形分析,而且无法使用自适应下降。
初始刚度(NROPT,INIT)。
程序在每一次平衡迭代中都使用初始刚度矩阵,该选项可以使迭代过程更容易收敛,但需要更多迭代次数得到收敛。
该选项不适用于大变形分析,求自适应下降不可用。
(2)指定载荷步选项这些选项可以在任何载荷中改变。
下列选项适用于非线性分析:●普通选项在普通选项包括:Time(TIME)。
ANSYS程序借助在每一个载荷步末端指定TIME参数识别出载荷步和子步。
使用TIME命令可以用来定义受某些实际物理量限制的TIME 值。
程序通过这个选项来指定载荷步的末端时间。
时间步的数目(NSUBST)和时间步长(DELTIM)。
非线性分析要求在每一个载荷步内有多个子步或时间步,从而ANSYS可以逐渐施加所给定的载荷,逐步得到精确解。
NSUBST和DELTIM命令具有同样的功效,及给定载荷步的起始、最小及最大步长,NSUBST定义在一个载荷步内将被使用的子步的数目,而DELTIM明确地定义时间步长。
如果自动时间步长是关闭的,那么起始子步长用于整个载荷步。
默认时是每个载荷步具有一个子步。
渐进式或阶跃式(KBC)。
在与应变率无关的材料行为的非线性静态分析中统称不需要指定这个选项,因为依据默认,载荷将为阶跃式的载荷(KBC,1)。
自动时间步长(AUTOTS)。
这一选项允许程序自动确定子步间载荷增量的大小和决定在求解期间是增加还是减小时间步长,默认时是OFF状态。
可一用AUTOTS命令打开自动时间步长和二分法。
通常激活自动时间步长,可以使程序决定在每一个载荷步内使用多少个时间步●非线性选项收敛准则(CMVTOL)。
默认的收敛准则:依据默认,程序将以VALUE TOLER的值队力或力矩进行收敛检查。
VALUE的默认值是在所加载荷或所加位移中取最大值。
TOLER的默认是0.001最大平衡迭代次数(NEQIT)。
使用这个选项来对每一个子步中进行的最大平衡迭代次数实行限制(默认25)。
如果在这个平衡迭代次数之内不能满足收敛准则,而且自动步长是打开的,程序将尝试使用二分法。
如果无法使用二分法,程序将根据NCNV命令所发出的指示终止分析过程,或者进行下一个迭代。
求解终止选项(NCNV)。
这个选项具有5种不同类型的终止准则:如果位移太大。
它建立一个用于终止程序执行的准则,对积累迭代次数设置限制,对整个程序运行时间设置限制,对整个CPU时间这只限制,如果平和迭代收敛,则控制程序是否终止执行。
弧长法(ARCLEN)。
如果预料到结构在其加载过程种,在某点会出现物理意义上不稳定(结构的载荷-位移曲线的斜度为0或为负值),则可以使用弧长法来稳定数值求解。
时间步长预测(PRED)。
对于每一个子步的第一次平衡迭代可以激活和DOF 求解相关的预测。
其特点是加速收敛。
如果非线性响应是相对平滑的,进行时间步长预测非常有用。
该选项不适用于包含大转动或粘弹效应分析。
线搜索选项(LNSRCH)。
该选项可代替自适应下降选项。
如果线搜索选项是打开的,程序将自动关闭自适应选项。
蠕变准则(CRPLIM,CRCR)。
如果结构表现出蠕变行为,可以指定蠕变准则用于时间步调整。
此时程序将对所有单元计算蠕变应变增量对弹性应变的比值。
如果最大比值步判据大,程序将减小下一个时间步长。
如果最大值比判据小,程序或许增加下一个时间步长(同样地程序将把自动时间步长建立在平衡迭代次数,即将发生单元状态的改变,以及塑性应变增量的基础上)。
如果比值高于0.25的稳定界限,且如果时间增量不能减小,求解过程可能由于发散而终止。
该问题可以通过采用足够小的时间步长来避免。