有限元分析报告理论基础
有限元分析基础(推荐完整)
图1-5 驾驶室受侧向力应力云图
图1-6 接触问题结构件应力云图
10
第一章 概述
图1-7 液压管路速度场分布云图
图1-8 磨片热应力云图
图1-9 支架自由振动云图
11
第二章 结构几何构造分析
2.1 结构几何构造的必要性 2.2 结构计算基本知识 2.3 结构几何构造分析的自由度与约束 2.4 自由度计算公式
(1)结点: ① 铰结点;② 刚结点;③ 混合结点。 (2)支座: ① 活动铰支座;② 固定铰支座 ;
③ 固定支座 ;④ 定向支座
15
第二章 结构几何构造分析
2.2.2 结构的分类与基本特征
(1) 按结构在空间的位置分 结构可分为平面结构和空间结构两大类
(2) 按结构元件的几何特征分 ① 杆系结构: 梁、拱、桁架、刚架、桁构结构等 。 ② 板壳结构 ③ 实体结构实体结构的长、宽、高三个尺寸都很 大,具有同一量级。 ④ 混合结构
d. 超静定结构中的多余约束破坏后,结构仍然保持 几何不变性,因而仍有一定的承载能力, 不致整个结构 遭受破坏。
e. 超静定结构由于具有多余的约束,因而比相应的 静定结构具有较大的刚度和稳定性, 在载荷作用下,内 力分布也较均匀,且内力峰值也较静定结构为小。
18
第二章 结构几何构造分析
2.2.3 结构对称性的利用
对称结构在正对称载荷下,对称轴截面上只能产生 正对称的位移,反对称的位移为零;对称结构在反对称 载荷下,对称轴截面上只有反对称的位移,正对称的位 移为零。 (1) 具有奇数跨的刚架
① 正对称载荷作用
(a) 对称刚架
(b) 变形状态分析
(c) 对称性利用
图2-22对称性利用示意图
19
有限元分析理论基础
有限元理论基础有限元方法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。
釆用不同的权函数和插值函数形式,便构成不同的有限元方法。
4.加权余量法:是指采用使余量的加权函数为零求得微分方程近似解的方法称为加权余量法。
(Weighted residual method WRM)是一种直接从所需求解的微分方程及边界条件出发,寻求边值问题近似解的数学方法。
加权余量法是求解微分方程近似解的一种有效的方法。
设问题的控制微分方程为:在V域内厶(")-八0 (5.1.1)在S 边界上〃(“)-& = 0 (5.1.2)式中:L、B——分别为微分方程和边界条件中的微分算子;f、g ——为与未知函数u无关的己知函数域值;u——为问题待求的未知函数当弄!J用力u权余•肚法求近丁以解首先在求耳军域上理立一个T式閑数H 一般兵升如下形式:仁土CN=NC(5.1.3)T M式中:c{----------- 彳寺定系数. 也可称为广义坐标;N:--- 取白完备函冬攵*S线.性无关的基函孕攵°由于〃一般只圮彳守求函缨攵U的近1以耳岂因u匕将式(5 1.3) 代入式(5 1 1)牙口式(5 1.2)后将诃•不誉斯兄,昔迅:| R] = L(flb— f在V域内\R B =B(^~g在S 边界上("14)城然 & 、尽反映了r式函竽攵与实解之问的偏差. 它丁门分另U称做内召卩牙口边界余覺。
若在域\'内引入内部权函数硏,在边界S上引入边界权函数W B 则可理立11个消除余甘的条件.一般可农示为:L兀W B1R B dS = 0 (/ = L2.L ,〃) (51-5)• V • S不同的权函数幵;和jr R反映了不同的消除余•眩的准则。
元分析理论基础 大全 超详细

非线性问题与线弹性问题的区别: 1)非线性问题的方程是非线性的,一般需要迭代求解; 2)非线性问题不能采用叠加原理; 3)非线性问题不总有一致解,有时甚至没有解。
有限元求解非线性问题可分为以下三类: 1)材料非线性问题
材料的应力和应变是非线性的,但应力与应变却很微小,此时应变与位移 呈线性关系,这类问题属于材料的非线性问题。由于从理论上还不能提供能普 遍接受的本构关系,所以,一般材料的应力与应变之间的非线性关系要基于试 验数据,有时非线性材料特性可用数学模型进行模拟,尽管这些模型总有他们 的局限性。在工程实际中较为重要的材料非线性问题有:非线性弹性(包括分 段线弹性)、弹塑性、粘塑性及蠕变等。
的平均值作为此两个单元合成的较大四边形单元形心处的应力。 如 2 单元的情况下,取平均应力可以采用算术平均, 即平均应力=(单元 1 的应力+单元 2 的应力)/2。 也可以采用精确一些的面积加权平均,
即平均应力=[单元 1 应力× 单元 1 的面积+单元 2 应力× 单元 2 面积](/ 单 元 1 面积+单元 2 面积)
有限元分析概念
有限元法:把求解区域看作由许多小的在节点处相互连接的单元(子域)所构 成,其模型给出基本方程的分片(子域)近似解,由于单元(子域)可以被分割成 各种形状和大小不同的尺寸,所以它能很好地适应复杂的几何形状、复杂的材料特 性和复杂的边界条件
有限元模型:它是真实系统理想化的数学抽象。由一些简单形状的单元组成, 单元之间通过节点连接,并承受一定载荷。
为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插
值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数
普通人有限元分析入门方法--理论学习篇

普通人有限元分析入门方法--理论学习篇展开全文(这文章写的时候估计会被喷,我已经做好心理准备的!)文章开始前,我要先说明:就像文章题目说的一样,本文只是从一个很普通的有限元分析工程人员的角度出发,既没有华丽的学历背景,也没有超一流的企业研发经验,更没有超高的智商,只是从一个普普通通的分析工程师角度和大家说说作为一个普通凡人如何去看待有限元分析学习的问题。
本人在网络上浸淫多年,有限元分析的学习也经历了整整10个年头,从一个无知小白到现在能够解决一些问题的工程人员,一路走来的心酸也是只有自己才知道。
回忆最初的起步,以及网络上看到很多新手学习的艰辛,想到写这样一篇文章,说说咱们这种普通人该如何去玩有限元分析。
我打算把文章分为理论学习篇、软件操作学习篇、实际应用学习篇和有限元分析行业市场分析篇四个部分,主要针对学习有限元分析5年以内的群体。
理论学习篇一说到有限元分析理论学习,我就觉得我上的那个是假大学,为啥随便来几个不是新手的人都是学过这么多课的,看过这么多书的,我上的大学不都是浪出来的么?我相信很多新手和我的感觉是一样一样的。
首先我以我目前的认知以及在网上很多人解答新手的问题来大致罗列下出镜率比较高的理论科目,并大致评估下学习需要的时间(假设我们从20岁开始为有限元分析打基础)。
大学本科四年掌握:高等数学、线性代数、材料力学、理论力学、概率统计,到这里24岁,这一阶段大多数的步调基本一致,接下来开始:1.弹性力学(1年);2.数值方法(0.5年);3.有限单元法(1年);4.振动力学(1年);5.损伤力学(1年);6.张量分析(1年);7.线性空间(1年);8.软件应用(0.5年)。
把以上的内容相加,大概7年时间,WTF!这些学完已经30+了,这玩意我还是按照及其保守的时间,实际操作起来只会长不会短,有人说我可以一起学,有这种想法的人可以试试,或者去问问身边群里那些正在学习的人(这类人肯定不少,而且多数都是新手),听听他们学习之后的感受。
有限元分析报告(1)
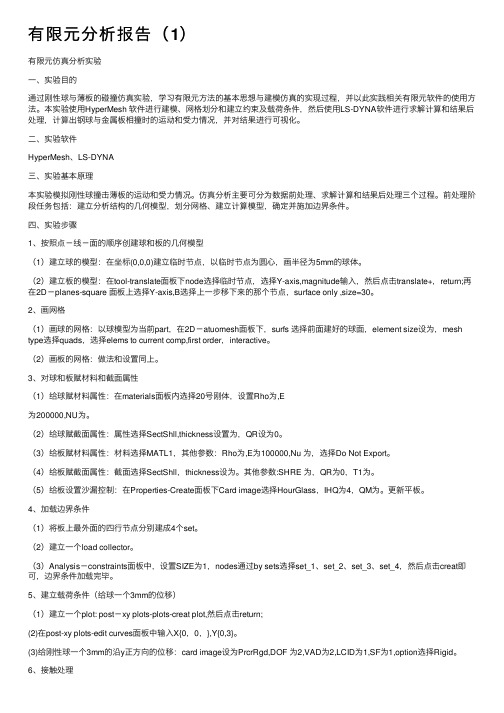
有限元分析报告(1)有限元仿真分析实验⼀、实验⽬的通过刚性球与薄板的碰撞仿真实验,学习有限元⽅法的基本思想与建模仿真的实现过程,并以此实践相关有限元软件的使⽤⽅法。
本实验使⽤HyperMesh 软件进⾏建模、⽹格划分和建⽴约束及载荷条件,然后使⽤LS-DYNA软件进⾏求解计算和结果后处理,计算出钢球与⾦属板相撞时的运动和受⼒情况,并对结果进⾏可视化。
⼆、实验软件HyperMesh、LS-DYNA三、实验基本原理本实验模拟刚性球撞击薄板的运动和受⼒情况。
仿真分析主要可分为数据前处理、求解计算和结果后处理三个过程。
前处理阶段任务包括:建⽴分析结构的⼏何模型,划分⽹格、建⽴计算模型,确定并施加边界条件。
四、实验步骤1、按照点-线-⾯的顺序创建球和板的⼏何模型(1)建⽴球的模型:在坐标(0,0,0)建⽴临时节点,以临时节点为圆⼼,画半径为5mm的球体。
(2)建⽴板的模型:在tool-translate⾯板下node选择临时节点,选择Y-axis,magnitude输⼊,然后点击translate+,return;再在2D-planes-square ⾯板上选择Y-axis,B选择上⼀步移下来的那个节点,surface only ,size=30。
2、画⽹格(1)画球的⽹格:以球模型为当前part,在2D-atuomesh⾯板下,surfs 选择前⾯建好的球⾯,element size设为,mesh type选择quads,选择elems to current comp,first order,interactive。
(2)画板的⽹格:做法和设置同上。
3、对球和板赋材料和截⾯属性(1)给球赋材料属性:在materials⾯板内选择20号刚体,设置Rho为,E为200000,NU为。
(2)给球赋截⾯属性:属性选择SectShll,thickness设置为,QR设为0。
(3)给板赋材料属性:材料选择MATL1,其他参数:Rho为,E为100000,Nu 为,选择Do Not Export。
02-01有限元分析基础-理论基础

Kq=f——————(1) 其中:K是整体刚度矩阵;
q是节点位移矩阵; f是载荷矩点位移 解有限元方程Kq=f可得到位移。在根据方
程组的特点来选择合适的计算方法。
通过上述分析了解到,有限元分析的基本 思路是“先离散在组装”,离散为了进行单 元分析,组装为了对整体结构进行分析。
σ=Eε—————(2-4) 将式(2-2)、式(2-3)代入到式(2-4) 后简化得到:
F=(AE/l)Δl—————(2-5) 式(2-5)与弹簧方程F=kx很相似。因此, 受轴向力作用的等截面杆看做一个弹簧,则:
keq=AE/l——————(2-6)
一、有限元分析理论基础
根据上述分析,杆件的截面面积都是在 一个方向上变化的。可以将杆件近似地看做 是由4个弹簧串联起来的模型。
(2)假定一个近似描述单元特性解 为研究典型单元的力学特性,不妨先考虑
横截面积为A、长度为l的杆件在外力F作用下 构件的变形。
杆件的平均应力由下式给出: σ=F/A————(2-2) 杆件的平均正应变ε为
ε=Δl/l————(2-3)
一、有限元分析理论基础
在弹性区域内,应力和应变服从胡克定 律,即:
1.2 定义单元特性 (2)定义单元的力学关系
根据单元的材料、形状、尺寸、节点数目、 位置等参数,找出单元节点力和节点位移的 关系式。 (3)计算等效节点力
物理模型离散化后,假定力是通过节点在 单元间进行传递的,但对于实际连续体,力 是通过单元的公共界面在单元间进行传递。
一、有限元分析理论基础
1.3 组装单元 利用结构中力的平衡条件和边界条件将各
利用以上模型,假定力施加在各节点上。 可根据有图中节点1~节点5的受力情况, 得到各节点上力的静平衡: 节点1:R1-k1(u2-u1)=0 节点2:k1(u2-u1)-k2(u3-u2)=0 节点3:k2(u3-u2)-k3(u4-u3)=0 节点2:k3(u4-u3)-k4(u5-u4)=0 节点2:k4(u5-u4)-P=0
有限元分析的基本原理

有限元分析的基本原理有限元分析法是一种通用的数值分析技术,它利用有限数目的计算元素来对结构的应力、变形以及失效的可能性进行分析,它简化了复杂的工程结构在实际受力情况下的模拟计算,可以预测出构件的性能、变形和可能失效等。
有限元分析是用数学模型来模拟生活用来模拟工程中结构抗压、抗弯、抗剪、抗疲劳等性能。
有限元分析有三个基本原理:结构变形、力学方程和材料本构方程。
首先,有限元分析的基础原理是结构变形。
结构变形是指在施加外力作用下,受力的结构的空间变形和大小的变化,它是有限元分析的基础,该原理说明了满足力学方程的解决方法如何以有限元的形式出现。
通常情况下,我们会把构件的耦合变形分成很多小的计算元(这些计算元之间有连接约束),减少变形的不确定性,从而提高分析的准确性。
其次,有限元分析的基础原理是力学方程。
满足力学方程条件的解决方案就是有限元分析,也就是把问题分解成很多小的子问题来求解。
力学方程最常见的形式是基于有限元技术的动态和静态结构分析。
动态结构分析是指结构在某个加载下的振动反应,涉及到施加外力、弹性和惯性效应。
静态结构分析则指结构在不同类型外力作用下的变形。
最后,有限元分析的基础原理是材料本构方程。
材料本构方程是指材料受拉力作用而形成变形和应力的关系,它可以用来描述材料在承受外力时的作用。
本构方程有很多不同的形式,最常用的形式是弹性体的本构方程,它说明了当受到外力作用时,材料的拉伸和压缩的反应,从而将其应用于有限元分析技术。
以上就是有限元分析的基本原理,它是构成有限元分析的基础,而且这些基本原理也被广泛应用于工程中对结构性能进行模拟和分析。
有限元分析可以帮助工程师准确地估算出结构在特定加载条件下的变形和应力,也可以帮助他们判断结构在疲劳荷载作用下是否会发生破坏。
有限元分析也可以帮助设计者更好地分析结构在复杂(多变)条件下的性能,以确定结构的最优设计。
所以,有限元分析的基本原理是工程分析的基础,合理的运用可以节约大量的时间和精力,从而达到性能最优的结构设计。
有限元分析报告
有限元分析报告是一项重要的工程技术和科学技术的应用。
它通过有限元方法的数学原理和实验的技术手段,对材料的物理特性和工程的技术问题进行了系统和科学的分析和研究,为工程设计和技术改进提供了有效的方法和手段。
本文通过对的基本概念、研究方法和应用实例的分析和探讨,帮助读者更好的理解和其在工程技术和科学技术中的应用。
一. 的基本概念是指通过数值模拟和实验技术手段,对材料的物理特性和工程的技术问题进行分析和研究,形成的综合性数据和报告。
它的基本原理就是通过将大的物理系统分解成为小的有限元结构,再通过计算机仿真技术对每个小的结构进行精确计算,综合分析得到整体物理特性和工程问题的实验数据和报告。
的主要作用是提供工程设计和技术改进的决策依据和参考,对工程质量和性能提升具有重要意义。
二. 的研究方法是一项基于数学和实验技术的前沿研究。
它的研究方法主要包括以下几个方面:1. 问题定义和模拟:通过对工程问题的定义和分析,建立适当的数学模型和参考数据,制定模拟方案和计算条件。
2. 离散化和剖分:将大的物理系统离散化成为小的有限元结构,通过精确的剖分和计算,获得每个小结构的物理特性和性能数据。
3. 计算仿真和验证:将累积的数据和模型进行计算仿真和验证,提取重要特征和关联特性,并结合实验数据和模型检验结果。
4. 报告撰写和解读:将仿真数据和实验数据进行综合分析和整理,撰写完整的,并解读和解释其中的重要数据和结论。
三. 的应用实例在工程技术和科学技术中有着广泛的应用。
以下是几个实际案例:1. 材料模拟和分析:通过,对材料的强度和硬度等物理特性进行模拟和分析,提高材料性能和品质。
2. 工程设计和优化:通过,对工程问题进行模拟和分析,提供有关工程设计和改进的决策依据和参考。
3. 故障分析和预测:通过,对工程设备和材料的故障进行分析和预测,提高设备性能和使用寿命。
4. 新技术和新产品的研究和开发:通过,对新技术和新产品进行模拟和研究,提高产品质量和竞争力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有限元分析概念有限元法:把求解区域看作由许多小的在节点处相互连接的单元(子域)所构成,其模型给出基本方程的分片(子域)近似解,由于单元(子域)可以被分割成各种形状和大小不同的尺寸,所以它能很好地适应复杂的几何形状、复杂的材料特性和复杂的边界条件有限元模型:它是真实系统理想化的数学抽象。
由一些简单形状的单元组成,单元之间通过节点连接,并承受一定载荷。
有限元分析:是利用数学近似的方法对真实物理系统(几何和载荷工况)进行模拟。
并利用简单而又相互作用的元素,即单元,就可以用有限数量的未知量去逼近无限未知量的真实系统。
线弹性有限元是以理想弹性体为研究对象的,所考虑的变形建立在小变形假设的基础上。
在这类问题中,材料的应力与应变呈线性关系,满足广义胡克定律;应力与应变也是线性关系,线弹性问题可归结为求解线性方程问题,所以只需要较少的计算时间。
如果采用高效的代数方程组求解方法,也有助于降低有限元分析的时间。
线弹性有限元一般包括线弹性静力学分析与线弹性动力学分析两方面。
非线性问题与线弹性问题的区别:1)非线性问题的方程是非线性的,一般需要迭代求解;2)非线性问题不能采用叠加原理;3)非线性问题不总有一致解,有时甚至没有解。
有限元求解非线性问题可分为以下三类:1)材料非线性问题材料的应力和应变是非线性的,但应力与应变却很微小,此时应变与位移呈线性关系,这类问题属于材料的非线性问题。
由于从理论上还不能提供能普遍接受的本构关系,所以,一般材料的应力与应变之间的非线性关系要基于试验数据,有时非线性材料特性可用数学模型进行模拟,尽管这些模型总有他们的局限性。
在工程实际中较为重要的材料非线性问题有:非线性弹性(包括分段线弹性)、弹塑性、粘塑性及蠕变等。
2)几何非线性问题几何非线性问题是由于位移之间存在非线性关系引起的。
当物体的位移较大时,应变与位移的关系是非线性关系。
研究这类问题一般都是假定材料的应力和应变呈线性关系。
它包括大位移大应变及大位移小应变问题。
如结构的弹性屈曲问题属于大位移小应变问题,橡胶部件形成过程为大应变问题。
3)非线性边界问题在加工、密封、撞击等问题中,接触和摩擦的作用不可忽视,接触边界属于高度非线性边界。
平时遇到的一些接触问题,如齿轮传动、冲压成型、轧制成型、橡胶减振器、紧配合装配等,当一个结构与另一个结构或外部边界相接触时通常要考虑非线性边界条件。
实际的非线性可能同时出现上述两种或三种非线性问题。
有限元理论基础有限元方法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。
采用不同的权函数和插值函数形式,便构成不同的有限元方法。
1.加权余量法:是指采用使余量的加权函数为零求得微分方程近似解的方法称为加权余量法。
(Weighted residual method WRM )是一种直接从所需求解的微分方程及边界条件出发,寻求边值问题近似解的数学方法。
加权余量法是求解微分方程近似解的一种有效的方法。
设问题的控制微分方程为:在V 域内 在S 边界上式中 :L 、B ——分别为微分方程和边界条件中的微分算子;f 、g ——为与未知函数u 无关的已知函数域值;u ——为问题待求的未知函数 ()0L u f -=(5.1.1)()0B u g -=(5.1.2)混合法对于试函数的选取最方便,但在相同精度条件下,工作量最大。
对内部法和边界法必须使基函数事先满足一定条件,这对复杂结构分析往往有一定困难,但试函数一经建立,其工作量较小。
无论采用何种方法,在建立试函数时均应注意以下几点:(1)试函数应由完备函数集的子集构成。
已被采用过的试函数有幂级数、三角级数、样条函数、贝赛尔函数、切比雪夫和勒让德多项式等等。
(2)试函数应具有直到比消除余量的加权积分表达式中最高阶导数低一阶的导数连续性。
(3)试函数应与问题的解析解或问题的特解相关联。
若计算问题具有对称性,应充分利用它。
显然,任何独立的完全函数集都可以作为权函数。
按照对权函数的不同选择得到不同的加权余量计算方法,主要有:配点法、子域法、最小二乘法、力矩法和伽辽金法。
其中伽辽金法的精度最高。
2、虚功原理——平衡方程和几何方程的等效积分“弱”形式虚功原理包含虚位移原理和虚应力原理,是虚位移原理和虚应力原理的总称。
他们都可以认为是与某些控制方程相等效的积分“弱”形式。
虚功原理:变形体中任意满足平衡的力系在任意满足协调条件的变形状态上作的虚功等于零,即体系外力的虚功与内力的虚功之和等于零。
虚位移原理是平衡方程和力的边界条件的等效积分的“弱”形式;虚应力原理是几何方程和位移边界条件的等效积分“弱”形式。
虚位移原理的力学意义:如果力系是平衡的,则它们在虚位移和虚应变上所作的功的总和为零。
反之,如果力系在虚位移(及虚应变)上所作的功的和等于零,则它们一定满足平衡方程。
所以,虚位移原理表述了力系平衡的必要而充分条件。
一般而言,虚位移原理不仅可以适用于线弹性问题,而且可以用于非线性弹性及弹塑性等非线性问题。
虚应力原理的力学意义:如果位移是协调的,则虚应力和虚边界约束反力在他们上面所作的功的总和为零。
反之,如果上述虚力系在他们上面所作的功的和为零,则它们一定是满足协调的。
所以,虚应力原理表述了位移协调的必要而充分条件。
虚应力原理可以应用于线弹性以及非线性弹性等不同的力学问题。
但是必须指出,无论是虚位移原理还是虚应力原理,他们所依赖的几何方程和平衡方程都是基于小变形理论的,他们不能直接应用于基于大变形理论的力学问题。
3、最小总势能法应变能:作用在物体上的外载荷会引起物体变形,变形期间外力所做的功以弹性能的形式储存在物体中,即为应变能。
由n 个单元和m 个节点组成的物体的总势能为总应变能和外力所做功的差:()11=n m e i i e i Fu ==∏Λ-∑∑ 最小势能原理:对于一个稳定的系统,相对于平衡位置发生的位移总会使系统的总势能最小,即:()110n m e i i e i i i i Fu u u u ==∂∏∂∂=Λ-=∂∂∂∑∑,i=1,2,3,……,n有限元法的收敛性有限元法是一种数值分析方法,因此应考虑收敛性问题。
有限元法的收敛性是指:当网格逐渐加密时,有限元解答的序列收敛到精确解;或者当单元尺寸固定时,每个单元的自由度数越多,有限元的解答就越趋近于精确解。
有限元的收敛条件包括如下四个方面:1)单元内,位移函数必须连续。
多项式是单值连续函数,因此选择多项式作为位移函数,在单元内的连续性能够保证。
2)在单元内,位移函数必须包括常应变项。
每个单元的应变状态总可以分解为不依赖于单元内各点位置的常应变和由各点位置决定的变量应变。
当单元的尺寸足够小时,单元中各点的应变趋于相等,单元的变形比较均匀,因而常应变就成为应变的主要部分。
为反映单元的应变状态,单元位移函数必须包括常应变项。
3)在单元内,位移函数必须包括刚体位移项。
一般情况下,单元内任一点的位移包括形变位移和刚体位移两部分。
形变位移与物体形状及体积的改变相联系,因而产生应变;刚体位移只改变物体位置,不改变物体的形状和体积,即刚体位移是不产生变形的位移。
空间一个物体包括三个平动位移和三个转动位移,共有六个刚体位移分量。
由于一个单元牵连在另一些单元上,其他单元发生变形时必将带动单元做刚体位移,由此可见,为模拟一个单元的真实位移,假定的单元位移函数必须包括刚体位移项。
4)位移函数在相邻单元的公共边界上必须协调。
对一般单元而言,协调性是指相邻单元在公共节点处有相同的位移,而且沿单元边界也有相同的位移,也就是说,要保证不发生单元的相互脱离开裂和相互侵入重叠。
要做到这一点,就要求函数在公共边界上能由公共节点的函数值唯一确定。
对一般单元,协调性保证了相邻单元边界位移的连续性。
但是,在板壳的相邻单元之间,还要求位移的一阶导数连续,只有这样,才能保证结构的应变能是有界量。
总的说来,协调性是指在相邻单元的公共边界上满足连续性条件。
前三条又叫完备性条件,满足完备条件的单元叫完备单元;第四条是协调性要求,满足协调性的单元叫协调单元;否则称为非协调单元。
完备性要求是收敛的必要条件,四条全部满足,构成收敛的充分必要条件。
在实际应用中,要使选择的位移函数全部满足完备性和协调性要求是比较困难的,在某些情况下可以放松对协调性的要求。
需要指出的是,有时非协调单元比与它对应的协调单元还要好,其原因在于近似解的性质。
假定位移函数就相当于给单元施加了约束条件,使单元变形服从所加约束,这样的替代结构比真实结构更刚一些。
但是,这种近似结构由于允许单元分离、重叠,使单元的刚度变软了,或者形成了(例如板单元在单元之间的绕度连续,而转角不连续时,刚节点变为铰接点)对于非协调单元,上述两种影响有误差相消的可能,因此利用非协调单元有时也会得到很好的结果。
在工程实践中,非协调元必须通过“小片试验后”才能使用。
应力的单元平均或节点平均处理方法最简单的处理应力结果的方法是取相邻单元或围绕节点各单元应力的平均值。
• 1.取相邻单元应力的平均值这种方法最常用于3节点三角形单元中。
这种最简单而又相当实用的单元得到的应力解在单元内是常数。
可以将其看作是单元内应力的平均值,或是单元形心处的应力。
由于应力近似解总是在精确解上下振荡,可以取相邻单元应力的平均值作为此两个单元合成的较大四边形单元形心处的应力。
如2单元的情况下,取平均应力可以采用算术平均,即平均应力=(单元1的应力+单元2的应力)/2。
也可以采用精确一些的面积加权平均,即平均应力=[单元1应力× 单元1的面积+单元2应力× 单元2面积]/(单元1面积+单元2面积)当相邻两单元面积相差不大时,两者的结果基本相同。
在单元划分时应避免相邻两单元的面积相差太多,从而使求解的误差相近。
一般而言,3节点三角形单元的最佳应力点是单元的中心点,此点的应力具有1阶的精度。
• 2.取围绕节点各单元应力的平均值首先计算围绕该节点(i )周围的相关单元在该节点出的应力值 ,然后以他们的平均值作为该节点的最后应力值其中,1~m 是围绕在i 节点周围的全部单元。
取平均值时也可进行面积加权。
i σ有限元法求解问题的基本步骤1.结构离散化对整个结构进行离散化,将其分割成若干个单元,单元间彼此通过节点相连;2.求出各单元的刚度矩阵[K](e)[K](e)是由单元节点位移量{Φ}(e)求单元节点力向量{F}(e)的转移矩阵,其关系式为:{F}(e)= [K](e) {Φ}(e)3.集成总体刚度矩阵[K]并写出总体平衡方程:总体刚度矩阵[K]是由整体节点位移向量{Φ}求整体节点力向量的转移矩阵,其关系式为{F}= [K] {Φ},此即为总体平衡方程。