交通流量的局部区间模糊C均值聚类算法
模糊c均值算法
模糊c均值算法模糊c均值算法概述模糊c均值算法(FCM)是一种聚类分析方法,用于将一组数据分成多个类别。
该算法通过最小化数据点与其所属的聚类中心之间的平方误差来实现聚类。
与传统的k均值算法相比,FCM可以处理更加复杂的数据集,因为它允许每个数据点属于多个聚类。
原理FCM的核心思想是将每个数据点表示为一个向量,并将这些向量分配到多个聚类中心。
这些聚类中心由算法自动确定,并且通常是随机初始化的。
在每次迭代中,FCM计算每个数据点与所有聚类中心之间的距离,并将其分配到最近的聚类中心。
然后,它重新计算每个聚类中心作为其所有成员向量的平均值,并使用这些新的聚类中心再次计算距离和分配。
这个过程重复进行直到满足某些收敛准则,例如固定数量的迭代或达到一定程度上的稳定性。
然而,在传统k均值算法中,一个数据点只能属于一个簇,但在FCM 中,一个数据点可以属于多个簇。
这是通过将每个数据点与每个聚类中心之间的距离表示为一个模糊值来实现的。
这个模糊值称为隶属度,它表示了数据点属于每个聚类中心的程度。
具体而言,对于一个数据点i和聚类中心j,隶属度u_ij表示数据点i属于聚类中心j的程度。
隶属度必须满足以下条件:1. $0 \leq u_{ij} \leq 1$ 对于所有的i和j2. $\sum_{j=1}^{c} u_{ij} = 1$ 对于所有的i在每次迭代中,FCM计算每个数据点与所有聚类中心之间的距离,并使用这些距离计算新的隶属度。
然后,它重新计算每个聚类中心作为其所有成员向量加权平均值,并使用这些新的聚类中心再次计算距离和分配。
优缺点优点:1. FCM可以处理多维数据,并且可以应用于各种各样的应用程序。
2. FCM允许数据点属于多个簇,因此更加灵活。
3. FCM不需要指定簇数量,因此更加自适应。
缺点:1. FCM对初始值敏感。
2. FCM的计算成本很高,特别是对于大型数据集。
3. FCM需要指定一些参数,例如模糊程度和收敛准则。
模糊 c 均值算法
模糊c 均值算法
模糊c均值算法,也叫Fuzzy C Means算法,是一种无监督的聚类算法。
与传统的聚类算法不同的是,模糊C均值算法允许同一样本点被划分到不同的簇中,而且每个样本点到各个簇的距离(或者说相似度)用模糊数表示,因而能更好地处理样本不清晰或重叠的情况。
模糊c均值算法的步骤如下:
1. 初始化隶属度矩阵U,每个样本到每个簇的隶属度都为0-1之间的一个随机数。
2. 计算质心向量,其中每一项的值是所有样本的对应向量加权后的和,权重由隶属度矩阵决定。
3. 根据计算得到的质心向量计算新的隶属度矩阵,更新每个样本点到每个簇的隶属度。
4. 如果隶属度矩阵的变化小于一个预先设定的阈值或者达到了最大迭代次数,则停止;否则,回到步骤2。
模糊c均值算法是一种迭代算法,需要进行多次迭代,直到满足一定的停止条件。
同时,该算法对于隶属度矩阵的初始值敏感,不同的初始值可能会导致不
同的聚类结果。
关于模糊c均值聚类算法
FCM模糊c均值1、原理详解模糊c-均值聚类算法fuzzy c-means algorithm (FCMA)或称(FCM)。
在众多模糊聚类算法中,模糊C-均值(FCM)算法应用最广泛且较成功,它通过优化目标函数得到每个样本点对所有类中心的隶属度,从而决定样本点的类属以达到自动对样本数据进行分类的目的。
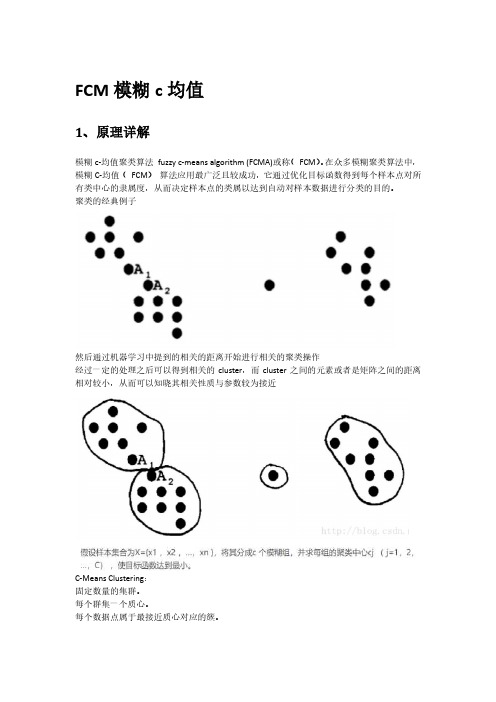
聚类的经典例子然后通过机器学习中提到的相关的距离开始进行相关的聚类操作经过一定的处理之后可以得到相关的cluster,而cluster之间的元素或者是矩阵之间的距离相对较小,从而可以知晓其相关性质与参数较为接近C-Means Clustering:固定数量的集群。
每个群集一个质心。
每个数据点属于最接近质心对应的簇。
1.1关于FCM的流程解说其经典状态下的流程图如下所示集群是模糊集合。
一个点的隶属度可以是0到1之间的任何数字。
一个点的所有度数之和必须加起来为1。
1.2关于k均值与模糊c均值的区别k均值聚类:一种硬聚类算法,隶属度只有两个取值0或1,提出的基本根据是“类内误差平方和最小化”准则,进行相关的必要调整优先进行优化看是经典的欧拉距离,同样可以理解成通过对于cluster的类的内部的误差求解误差的平方和来决定是否完成相关的聚类操作;模糊的c均值聚类算法:一种模糊聚类算法,是k均值聚类算法的推广形式,隶属度取值为[0 1]区间内的任何数,提出的基本根据是“类内加权误差平方和最小化”准则;这两个方法都是迭代求取最终的聚类划分,即聚类中心与隶属度值。
两者都不能保证找到问题的最优解,都有可能收敛到局部极值,模糊c均值甚至可能是鞍点。
1.2.1关于kmeans详解K-means算法是硬聚类算法,是典型的基于原型的目标函数聚类方法的代表,它是数据点到原型的某种距离作为优化的目标函数,利用函数求极值的方法得到迭代运算的调整规则。
K-means算法以欧式距离作为相似度测度,它是求对应某一初始聚类中心向量V最优分类,使得评价指标J最小。
模糊c均值聚类算法及应用
模糊c均值聚类算法及应用随着数字化时代的到来,数据量的增加让人们变得更加注重数据分析与聚类。
相比较传统的聚类算法,模糊c 均值聚类算法在实际应用中的效果更加出色。
本文将对模糊c均值算法进行详细介绍,并且剖析其在实际应用中的优势。
一、什么是模糊c均值聚类算法模糊c均值聚类算法是一种基于物理学中的隶属度理论,来对不同种类数据进行分类的一种算法。
其基本原理是通过计算不同数据在所属类别中的隶属程度,并根据不同的权重来计算数据的均值和方差,从而实现对数据进行分类的目的。
在传统的c均值聚类算法中,所有的数据点都必须完全属于某一个类别中,而在模糊c均值聚类算法中,一个数据点可以属于多个不同的类别,且归属于每个类别的隶属度都是按照百分比计算的。
换句话说,每个数据点都有可能属于多个不同的类别,且在不同类别中的权重不同。
二、模糊c均值聚类算法的优势模糊c均值聚类算法在大量实验中都取得了理想的效果。
其优势主要有以下几个方面:1.能够适应不同数据的分布情况在聚类分析中,很多数据不是严格遵循正态分布等统计规律的,这就使得传统的c均值聚类算法很难准确分类。
然而,采用模糊c均值算法处理这些数据时,可以很好地适应多样性的数据分布。
2. 更准确地表达数据之间的联系在实际应用中,很多数据点不仅需要分类,还要进行关联性分析。
在传统的c均值聚类算法中,只能体现点与点之间的距离远近,很难准确刻画数据之间的关联关系。
而在模糊c均值聚类算法中,可以很好地给每个点进行加权处理,使得每个点被分类后能更加准确地表达和传达其所代表的信息。
3. 更加灵活的聚类动态传统的c均值聚类所表现出来的聚类动态,很难被实时地调整。
而模糊c均值聚类算法中,每个数据点都有一定的隶属度,可以更加灵活地调整聚类动态。
使用模糊c 均值求解,总是能得到的比传统c均值聚类更加的平滑,不容易受到某些噪音的干扰,更能够优化每个点的分类。
三、模糊c均值聚类算法的应用1. 人脸识别在人脸识别领域,模糊c均值算法可以有效地应用于人脸的分类和特征提取。
模糊C均值(FuzzyC-Means)聚类论文:模糊C均值(FuzzyC-Means)聚类支..

模糊C均值(Fuzzy C-Means)聚类论文:模糊C均值(Fuzzy C-Means)聚类支持向量机(SVM) Laws纹理测同质性模型 Gabor滤波器【中文摘要】图像分割是图像处理的一个重要工具,一个有效的、前端的、复杂的算法。
它能够简化对图像的后续处理,并在视频和计算机视觉方面都有应用,如目标定位或识别、数据压缩、跟踪、图像检索等等。
虽然大量的图像分割算法已被广大研究者提出并改进,但是没有人提出一种完美的,适合于任何一种图像的分割算法,现有的方法都多少存在着方法或算法上的不足。
因此到目前为止,图像分割作为一个重要工具的同时,仍然是图像处理领域的一个具有挑战性的难题。
当前,对基于像素级、多特征、多种分割算法相结合的分割方法的研究,已经成为图像分割领域的热点。
通过认真总结,本文对模糊聚类算法和优于传统机器学习的支持向量机方法,从理论和实验结果等方面都进行了全面系统的比较和分析。
通过像素颜色,纹理等特征来描述图像的具体信息,并结合模糊C均值聚类(FCM,Fuzzy C-Means)算法和支持向量机(SVM)的方法展开实验,主要任务如下:1.本文对模糊聚类算法特别是模糊C均值聚类(FCM,Fuzzy C-Means)分割算法进行细致深入的研究探讨,并认真研究了模糊聚类图像分割算法中初始聚类类别数确定、初始聚类中心和隶属度函数的选择。
2.以模糊C均值聚类(FCM,Fuzzy C-Means)理论为基础,提出了一种结合laws纹理测度与自适应阈值的FCM聚类算法对图像进行分割。
通过大量实验对比表明,该算法与人的视觉感知系统一致性好,对噪声有良好的抑制效果,节省实验过程中程序运行的时间,提高图像分割速度。
3.通过核函数类型、核参数、惩罚因子等因素,对采用支持向量机(SVM)进行图像分割的方法的可行性进行了分析、研究,提出了一种基于无监督的支持向量机分类算法,为使用支持向量机方法(SVM)进行图像分割提供了依据。
城市交通拥挤事件的模糊C均值聚类识别方法研究

就越大。
9:10-9:15 0.9311 12:40-12:45 0.6320 0:40-0:45 0.0948
2.2 计算步骤:
9:15-9:20 0.8969 12:45-12:50 0.5987 0:45-0:50 0.1030
①选择一个常数 ε>0,置迭代次数 k=0,随机给出聚类中心矩阵 V(0)。 9:20-9:25 0.9470 12:50-12:55 0.7062 0:50-0:55 0.1982
基金项目:国家自然科学基金(51008196),上海市重点学科项目(S30504), 度,uij 满足下述条件:
上海市研究生创新基金(JWCXSL1002),上海市科委科技攻关项
①uij∈[0,1];
目(10dz21510700)。
②每个样本对全部聚类中心的隶属度之和为 1;
作 者 简 介 :吴宏娜(1984-),女,辽宁阜新人,上海理工大学硕士研究生,研究
achieves the purpose of traffic congestion incident identification.
关键词: 模糊聚类;交通拥挤事件;交通流;事件识别
Key words: fuzzy clustering; traffic congestion incident; traffic flow; incident identification
nc
ΣΣ minJm(U,V)=
m2
uij dij
j=1 i=1
(1<m<∞)
其约束条件为:
燮c
Σ 燮
燮
燮
燮 燮
i=1
uij =1坌j
燮
u燮
燮 ij
模糊c均值聚类算法
模糊c均值聚类算法C均值聚类算法(C-Means Clustering Algorithm)是一种常用的聚类算法,目的是将一组数据点分成若干个类群,使得同一类群内的数据点尽可能相似,不同类群之间的数据点尽可能不相似。
与K均值聚类算法相比,C均值聚类算法允许一个数据点属于多个类群。
C均值聚类算法的基本思想是随机选择一组初始聚类中心,然后通过迭代的方式将数据点分配到不同的类群,并调整聚类中心,直到满足停止条件。
算法的停止条件可以是固定的迭代次数,或者是聚类中心不再改变。
具体而言,C均值聚类算法的步骤如下:1.随机选择k个初始聚类中心,其中k是预先设定的类群数量。
2.根据欧氏距离或其他距离度量方法,计算每个数据点到每个聚类中心的距离。
3.将每个数据点分配到距离最近的聚类中心的类群。
4.根据聚类中心的分配情况,更新聚类中心的位置。
如果一个数据点属于多个类群,则根据各个类群的权重计算新的聚类中心位置。
5.重复步骤2到4,直到满足停止条件。
C均值聚类算法的优点是灵活性高,可以允许一个数据点属于多个类群。
这在一些应用场景中非常有用,例如一个商品可以属于多个类别。
然而,C均值聚类算法的缺点是计算复杂度较高,对初始聚类中心的选择敏感,以及类群数量k的确定比较困难。
为了解决C均值聚类算法的缺点,可以采用如下方法进行改进:1.使用聚类效度指标来评估聚类结果的好坏,并选择最优的聚类中心数量k。
2. 采用加速算法来减少计算复杂度,例如K-means++算法可以选择初始聚类中心,避免随机选择的可能不理想的情况。
3.对数据进行预处理,例如归一化或标准化,可以提高算法的收敛速度和聚类质量。
4.针对特定应用场景的需求,可以根据数据属性来调整聚类中心的权重计算方式,以适应特定的业务需求。
总结起来,C均值聚类算法是一种常用的聚类算法,与K均值聚类算法相比,它可以允许一个数据点属于多个类群。
然而,C均值聚类算法也存在一些缺点,例如计算复杂度高,对初始聚类中心的选择敏感等。
模糊c均值聚类算法原理详细讲解
模糊c均值聚类算法原理详细讲解模糊C均值聚类算法(Fuzzy C-means clustering algorithm)是一种经典的无监督聚类算法,它在数据挖掘和模式识别领域被广泛应用。
与传统的C均值聚类算法相比,模糊C均值聚类算法允许数据点属于多个聚类中心,从而更好地处理数据点的不确定性。
本文将详细讲解模糊C均值聚类算法的原理。
模糊C均值聚类算法的目标是将数据集划分为K个聚类,其中每个聚类由一个聚类中心表示。
与C均值聚类算法类似,模糊C均值聚类算法也涉及两个步骤:初始化聚类中心和迭代更新聚类中心。
首先,需要初始化聚类中心。
在模糊C均值聚类算法中,每个数据点都被赋予属于每个聚类中心的隶属度,表示该数据点属于每个聚类的程度。
因此,需要为每个数据点初始化一个隶属度矩阵U。
隶属度矩阵U的大小是n×K,其中n是数据点的数量,K是聚类的数量。
隶属度矩阵的元素u_ij表示第i个数据点属于第j个聚类的隶属度。
接下来,需要迭代更新聚类中心。
在每次迭代中,需要计算每个数据点属于每个聚类的隶属度,并使用这些隶属度来更新聚类中心。
具体来说,对于每个数据点i和聚类中心j,可以计算其隶属度为:u_ij = (1 / ∑_(k=1)^K (d_ij / d_ik)^(2 / (m-1))),其中d_ij表示数据点i和聚类中心j之间的距离,d_ik表示数据点i和聚类中心k之间的距离,m是模糊参数,通常取大于1的值。
然后,根据更新的隶属度计算新的聚类中心。
对于每个聚类中心j,可以计算其更新为:c_j = (∑_(i=1)^n (u_ij)^m * x_i) / ∑_(i=1)^n (u_ij)^m,其中x_i表示数据点i的坐标。
以上的迭代更新过程会一直进行,直到满足停止准则,例如隶属度矩阵U的变化小于一些阈值或达到最大迭代次数。
模糊C均值聚类算法的优点是在处理数据点的不确定性方面表现出色。
由于允许数据点属于多个聚类中心,模糊C均值聚类算法可以更好地处理数据点在不同聚类之间的模糊边界问题。
模糊c均值聚类算法
模糊c均值聚类算法
模糊c均值聚类算法(Fuzzy C-Means Algorithm,简称FCM)是一种基于模糊集理论的聚类分析算法,它是由Dubes 和Jain于1973年提出的,也是用于聚类数据最常用的算法之
一。
fcm算法假设数据点属于某个聚类的程度是一个模糊
的值而不是一个确定的值。
模糊C均值聚类算法的基本原理是:将数据划分为k个
类别,每个类别有c个聚类中心,每个类别的聚类中心的模糊程度由模糊矩阵描述。
模糊矩阵是每个样本点与每个聚类中心的距离的倒数,它描述了每个样本点属于每个聚类中心的程度。
模糊C均值聚类算法的步骤如下:
1、初始化模糊矩阵U,其中每一行表示一个样本点,每
一列表示一个聚类中心,每一行的每一列的值表示该样本点属于该聚类中心的程度,U的每一行的和为
1.
2、计算聚类中心。
对每一个聚类中心,根据模糊矩阵U
计算它的坐标,即每一维特征值的均值。
3、更新模糊矩阵U。
根据每一个样本点与该聚类中心的距离,计算每一行的每一列的值,其中值越大,说明该样本点属于该聚类中心的程度就越大。
4、重复步骤2和步骤
3,直到模糊矩阵U不再变化,即收敛为最优解。
模糊C均值聚类算法的优点在于它可以在每一个样本点属于每一类的程度上,提供详细的信息,并且能够处理噪声数据,因此在聚类分析中应用十分广泛。
然而,其缺点在于计算量较大,而且它对初始聚类中心的选取非常敏感。
模糊 c 均值聚类算法
模糊 c 均值聚类算法概述模糊 c 均值聚类算法是一种基于模糊逻辑的聚类算法,其通过将每个数据点分配到不同的聚类中心来实现数据的分组。
与传统的 k-means 算法相比,模糊 c 均值聚类算法在处理数据集特征模糊和噪声干扰方面表现更好。
本文将详细介绍模糊 c 均值聚类算法的原理、优点和缺点,以及其在实际应用中的一些场景和方法。
原理模糊 c 均值聚类算法基于模糊集合理论,将每个数据点分配到不同的聚类中心,而不是像 k-means 算法一样将数据点硬性地分配到最近的聚类中心。
算法的核心是定义每个数据点属于每个聚类中心的权重,即模糊度。
具体而言,模糊 c 均值聚类算法的步骤如下:1.初始化聚类中心。
从输入数据中随机选择一些数据作为初始聚类中心。
2.计算每个数据点到每个聚类中心的距离。
可以使用欧氏距离或其他距离度量方法。
3.根据距离计算每个数据点属于每个聚类的模糊度。
模糊度是一个介于 0 和1 之间的值,表示某个数据点属于某个聚类的程度。
4.更新聚类中心。
根据数据点的模糊度重新计算每个聚类的中心位置。
5.重复步骤 2、3 和 4,直到聚类中心的位置不再发生明显变化或达到预定的迭代次数。
优点模糊 c 均值聚类算法相比传统的 k-means 算法具有以下优点:1.模糊度。
模糊 c 均值聚类算法可以为每个数据点分配一个模糊度值,这样可以更好地应对数据集中的噪声和模糊性。
而 k-means 算法仅将数据点硬性分配到最近的聚类中心。
2.灵活性。
模糊 c 均值聚类算法中的模糊度可以解释某个数据点同时属于多个聚类的情况,这在一些实际应用中可能是具有意义的。
3.鲁棒性。
模糊 c 均值聚类算法对初始聚类中心的选择相对不敏感,因此在大多数情况下能够获得较好的聚类结果。
缺点虽然模糊 c 均值聚类算法具有许多优点,但也存在一些缺点:1.计算复杂度。
模糊 c 均值聚类算法需要在每个迭代步骤中计算每个数据点与每个聚类中心的距离,这导致算法的计算复杂度较高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式 ( ) 求 每 一 样 本 对 于 每 一 个 聚 类 的 隶 属 度 和 均 2要
为 1 。在 该 式 条 件 下 求 目标 函 数 , 式 () 极 小 值 , 即 1的 令 对 m 和 ux 的偏导 数为 0 可 得 m 和 u魁必要 条件 : i () , i) (
K y wo d e r s: S VM ;f z y c me n l o tm ; p e it n; s p r t n i f r t n u z — a s ag r h i rdci o e aa i n o ma i o o
非 线 性 函 数 估 计 的 支 持 向 量 机 算 法 S (u p r VM【 S p ot l Vetr c ie 是 神 经 网 络 领 域 中 的 一 种 重 要 的 方 法 . c Mahn ) o 主 要 解 决 函 数 估 值 和 时 间 序 列 预 测 的 问 题 。 年 来 许 多 近 学 者 对 此 作 了 许 多 深 入 的 研 究 , 仅 形 成 了 一 套 较 为 完 不 备 的 理 论 与 方 法 , 且 其 应 用 也 是 日趋 广 泛 。但 由 于 该 而 方 法 复 杂 度 高 、 确 度 低 , 此 , 文 提 出 了 一 种 对 交 精 为 本 通 流 量 的 确 定 方 法 , 局 部 区 间 模 糊 C 均 值 聚 类 算 法 即 ( A C , A C 算 法 是 一 种 可 以 被 广 泛 使 用 的 、 于 L F M) L F M 基 目标 函 数 优 化 的 、 监 督 模 糊 聚 类 方 法 , 无 需 训 练 样 无 它 本 , 过 迭 代 执 行 分 类 算 法 来 提 取 各 类 的 特 征 值 。该 算 通
L Z J n, ENG i u I e u Z L J n
( u a ntue f T c nlg , e ga g 2 0 2, h a H n n Istt i o eh ooy H n yn 4 10 C i ) n
A src : T i a e rpss a fz C m a s (C ) a o tm o h oa ra w i c n rdc te o ua o b t t hs pr po oe uz - en F M l rh fr te lcl e , hc a e ue h cmp tin a p y gi a h t cmpei n nrae te s tt a sed h cuay o smao s as m rvd e  ̄ te p  ̄a fzy e m a sF M) o lx y a d ices h t i i l pe .T e acrc f et t n i l ipoe .V r h a i uz - en (C t a sc i i o i l
jl =
() 2
法 对 某 高 速 公 路 段 的 交 通 流 量 进 行 聚 类 分 析 , 用 Ma 利 t —
lb进 行 仿 真 来 判 定 该 道 路 的 使 用 效 率 及 阻 塞 情 况 。 实 a
验 结 果 表 明 模 糊 均 真 算 法 F M( uz C— a s 比 S C F zy Men ) VM
每 个 元 素 包 含 多 个 属 性 的 样 本 集 合 , 1, … , ) m( 2, c 为
每 个 聚 类 的 中心 , C为 预 定 的 分 类 数 目 ,i 第 i 样 u() x是 个
本 对 于 第 类 样 本 的 隶 属 度 。则 隶 属 度 函 数 定 义 的 聚 类 阻 塞 目标 函 数 为 :
中 图 分 类 号 :T 3 1 P 9 文 z C- e n c u t rn l o i m o h l c l r a f ta fc lo m a s l s e i g a g rt h f r t e o a a e o r f f w i
Te h i e a d M e h c nqu n t od
交通流量 的局部 区 间模糊 C均值聚 类算 法
李 泽 军 , 利 军 曾 ( 南 工 学 院 计 算 机 科 学 系 , 南 衡 阳 4 10 ) 湖 湖 2 0 2
摘 要 :提 出 了一种 局 部 区间模 糊 C均值 算 法 ,该 算 法 不 仅 能 减 少计 算 的 复 杂 性 、提 高 统 计速 度 , 时能提 高 函数 估 算 值 的精 确 度 。 利 用 紧致 性 函数 和 分 离性 函数 对 局 部 模 糊 C均 值 聚 类 算 法进 同 行有效性验证 , 实验 结 果 表 明该 算 法具 有 较 高的 预 测精 度 。 关键 词 :S M; 糊 C均 值 算 法 ; 测 ; 离信 息 V 模 预 分
∑ ∑[ J 『广1 rI /I @ 7I ,z i
jJ i = =l
其 中 ,l l l 为 兀 素 与 聚 类 中 心 的距 离 , {- xm l l b是 一 个 口以 J
控 制 聚 类 结 果 的 加 权 模 糊 程 度 参 数 ( >1 。 b )
2 ’ J 1 1 2 …, 一 2 : = , , n