重庆大学机械原理研复习(2010)
重庆大学机械原理章节习题库 2连杆机构

2连杆机构2.1常见四杆机构分类依据是什么?铰链四杆机构分类依据是什么?2.2铰链四杆运动链具有整转副的条件是什么?铰链四杆机构曲柄存在条件是什么?2.3四杆机构都有哪些演化途径?2.4叙述极位夹角的定义。
2.5叙述行程速比系数的定义。
2.6画出曲柄滑块机构、摆动导杆机构的极为夹角。
2.7叙述求法瞬心的一般步骤。
2.8叙述压力角和传动角的定义。
2.9画出曲柄摇杆机构、曲柄滑块机构、摆动导杆机构的压力角/传动角。
2.10画出曲柄摇杆机构、曲柄滑块机构、摆动导杆机构的γmin。
2.11叙述出现死点位置的条件和特征。
2.12如图2-1所示,设已知四杆机构各构件的长度L AB=240 mm;L BC=600 mm;L CD=400 mm;L AD=500mm。
试回答下列问题:⑴当取杆AD为机架时,是否有曲柄存在?⑵若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?2.13在图2-2所示的铰链四杆机构中,各构件的长度分别为:l AB=28mm,l BC=52mm,l CD=50mm,l AD=72mm。
1)若取AD为机架,求该机构的极位夹角θ和行程速度变化系数K,杆CD的最大摆角ϕ和最小传动角γmin;2)若取AB为机架,该机构将演化为何种类型的机构?为什么?这时C、D两个转动副是整转副还是摆转副?2.14 在图2-3所示六杆机构中,各构件的尺寸为:l AB=30mm,l BC=55mm,l AD=50mm,l CD=40mm,l DE=20mm,l EF=60mm,滑块F为运动输出构件。
试确定:1)四杆机构ABCD的类型;2)机构的行程速度变化系数K为多少?3)滑块F的行程H为多少?4)求机构的最小传动角γmin?5)导轨DF在什么位置时滑块在运动中的压力角最小?图2-1 图2-2图2-3图2-4图2-5 图2-62.15试求图2-4所示各机构在图示位置时的全部瞬心的位置。
【重庆大学825机械原理】核心考点及真题精讲课程—讲义
第二部分真题回顾及其解析通过真题的学习和掌握,可以帮助学生把握考试重点。
每年的考点在历年试题中几乎都有重复率,因此,通过对历年真题的把握,可以掌握今年考试的重点。
另外,可以通过对历年真题的学习,把握出题者的思路及方法。
每种考试都有自己的一种固定的模式和结构,而这种模式和结构很难用语言来表述。
而通过认真揣摩历年真题,可以找到这种感觉。
因此,第四部分就真题进行详细的剖析,以便考生掌握命题规律、知悉命题的重点、难点、高频考点,帮助考生迅速搭建该学科考试的侧重点和命题规则。
2.1真题分析年份题型分值考察范围考察难度(了解、理解、掌握、应用)2010计算绘图143825机械原理掌握论述7825机械原理掌握2009计算绘图150825机械原理掌握2008计算绘图150825机械原理掌握2007计算绘图150825机械原理掌握综合来说,825机械原理专业课这几年的题型变化不大,主要有计算绘图题型,难度不变,侧重于对基础知识点的掌握。
在复习时,对于了解的知识点,复习的时候,多花时间加以深入理解和掌握;对于熟悉的知识点,复习的时候,可以花相应的时间复习强化;对于掌握的知识点,复习的时候,多做练习,达到熟练掌握和理解。
2.2真题剖析2002年真题【点评】本年份考试科目为机械设计,包含有机械原理,在本部分真题解析只对其中机械原理真题进行解析。
本年份真题包括以下1种题型:3道计算作图题,总计50分。
【题目】一1.计算图一所示发动机配气机构的自由度,若有复合铰链,局部自由度,虚约束,应明确指出。
(5分)图一【解题】F=3n-(2P L+P H)-F’=3×7-(2×9+1)-1=1A处滚子带入局部自由度,H(G)处与G(H)处的移动副起重复约束作用,故H(G)处移动副带入虚约束。
【分析】该题包括机构自由度的计算,虚约束,局部自由度以及复合铰链4个知识点。
机构自由度的计算,是每年必考的的知识点之一。
命题者主要想考察同学在进行机构自由度计算时,对虚约束,局部自由度和复合铰链这三个知识点的把握程度。
重庆大学动力机械及工程专业内燃机原理20022010年考研真题
重庆大学2002硕士研究生入学考试试题考试科目:内燃机原理专业:动力机械及工程考生注意:答题一律答在答题纸或者答题册上,答在试题上按零分记。
一.名词解释(每题2.5分,共15分)充气效率平均有效压力扩散燃烧过量扫气系数内燃机速度特性几何供油规律二.判断题(每题1.5分,共15分,依题意回答“正确”或“错误”,凡是你认为“错误”者,请予以更正,写出正确见解,不要求解释)1.内燃机在怠速时其指示功率Ni≠0,但有效功率Ne=0,每小时耗油量Mb=0。
2.二行程内燃机换气质量的基本要求是在尽可能小的过量扫气空气系数下获得尽可能高的扫气效率。
3.不计柴油本身的体积,柴油机中燃烧前后摩尔数的变化M∆与燃料中含碳量gc 和过量空气系数α无关。
4.内燃机性能指标有两种,一种是以工质在气缸内对活塞做功为基础的性能指标,称为有效性能指标,它们能评定整个内燃机性能的好坏;另一种是从内燃机功率输出轴上得到的净功率为基础的性能指标,称为指示性能指标,它们只能评定工作循环进行的好坏。
5.已知一四冲程汽油机汽缸数为4,单缸排量为2L,燃料的低热值为40000KJ/Kg,当转速为1500rpm,机械效率为0.8,有效功率为80Kw,油耗量为20Kg/h,该机的指示热效率为35%。
6.在四行程内燃机的实际换气过程中,存在着各种损失,其中进气损失与排气损失之和为泵气损失。
7.汽油机的主要燃烧方式是预混燃烧方式,在低负荷下燃烧效果较好;柴油机的主要燃烧方式是扩散燃烧,在高负荷下燃烧效果较好。
8.汽油机的转速增加,其爆燃倾向增加;负荷增加,其爆燃倾向减小。
9.增加柴油机的供油提前角,将使其工作更平稳、柔和。
10.内燃机的理想放热规律是先急后缓。
三.问答题1.测取内燃机机械效率的方法有哪些?各有何特点?其适用范围如何?(8分)2.出油阀有何作用(5分)3.柴油机在低温下冷启动困难的原因是什么?如何改进柴油机的冷启动性能?(写出两种措施即可)。
重庆大学机械原理期末试卷

提示: Lh
=
16670 ⎜⎛ C ⎟⎞ε n ⎝P⎠
2. 在图示轮系中,已知各齿轮齿数(括号内为齿数),1 为单头左旋蜗杆, 试判定该轮系是什么轮系,计算传动比 i16,并用箭头表示各轮的转向。
得分
16. 平键联接的工作面是平键的上、下表面。
()
审 题
人
()
:
一、 判断题(1 分/每小题,共 16 分,对打“√”,错打“×”) 二、 单项选择题(2 分/每小题,共 30 分)
1. 设计软齿面闭式齿轮传动时,小齿轮齿面硬度应小于大齿轮齿面硬度。 ()
1. 齿轮齿根弯曲强度计算中的齿形系数 YFa 与____________无关。
D、保证链条与轮齿间的良好啮合
11. 采用螺纹联接时,若被联接件之一厚度较大且材料较软,强度较低,需
要经常装拆,则一般宜采用____________。
A、螺栓联接
B、双头螺柱联接
C、螺钉联接
D、紧定螺钉联接
12. 凸 轮 机 构 中 当 从 动 件 位 移 规 律 为 等 加 速 等 减 速 运 动 规 律 时 ,
____________。
A、不存在冲击
B、存在刚冲击
C、存在柔性冲击
D、同时存在刚性和柔性冲击
13. 限制蜗杆分度圆直径的目的是____________。
A、保证蜗杆有足够的刚度
B、提高蜗杆的传动效率
C、减少蜗轮滚刀的数目,并便于刀具的标准化
D、保证蜗杆有足够的弯曲强度
14. 在轴的初步计算中,轴的直径是按____________进行初步确定的。
重庆大学2010-2011(2)机械原理试题A

重庆大学 机械原理 课程试卷2010 ~2011学年 第 二 学期开课学院: 机械工程 课程号: 11033635 考试日期: 2011.6.25考试方式: 考试时间: 120 分钟一、平面机构结构分析(15分)1. 试用图1-1所示II 级基本杆组搭接一个自由度为1,且输入运动为单向连续转动,输出运动为往复直线移动的平面六杆机构,画出机构结构示意图,标出原动件;(4分)2. 图1-2所示机构中,凸轮为一偏心圆,圆心在O 点。
(1)计算该机构的自由度,明确指出机构中的复合铰链、局部自由度或虚约束;(5分) (2)画出该机构在图示瞬时的低副替代机构示意图,取凸轮为原动件,对机构进行结构分析。
要求画出拆分机构后的驱动杆组(原动件和机架)和基本杆组,并确定机构的级别。
(6分)二、平面连杆机构分析与设计(25分)1. 图2-1为一平行四边形机构的机构运动简图。
曲柄1的角速度为ω1,角加速度为α1,方向如图所示。
(1)标出该机构在图示位置的压力角α;(2分)(2)用相对运动图解法求点C 的速度v C ,构件2、3的角速度ω2、ω3(要求列出速度向量方程,作出速度多边形,建议以pb =30mm 表示v B ,所有作图线要清晰);(6分)(3)用相对运动图解法求点C 的加速度a C ,构件2、3的角加速度α2、α3(要求列出加速度向量方程,作出加速度多边形,建议以p 'n 'B =30mm 表示nB a , n 'B b '=30mm 表示tB a ,所有作图线要清晰)。
(6分)命题人:机械原理教学组组题人:秦伟审题人:宋立权命题时间:2011.06教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密图1-1图2-1G图1-22. 设计一个全铰链六杆机构,其结构为前置曲柄摇杆机构后接一个RRR 型II 级组。
曲柄摇杆机构行程速比系数K =1.4,摇杆CD 的两极限位置分别为C 1D 及C 2D ,摆角ϕ=60︒,其对应输出构件EF 的两条标线位置分别为FG 1和FG 2,摆角ψ=30︒。
重庆大学机械原理章节习题库 第二章复习题
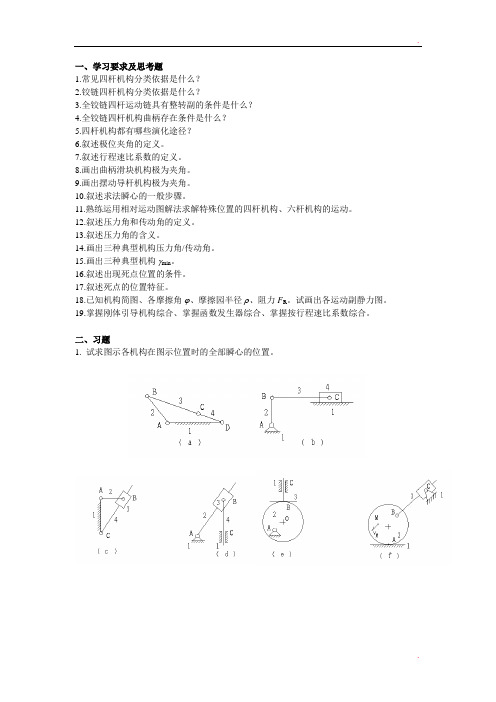
一、学习要求及思考题1.常见四杆机构分类依据是什么?2.铰链四杆机构分类依据是什么?3.全铰链四杆运动链具有整转副的条件是什么?4.全铰链四杆机构曲柄存在条件是什么?5.四杆机构都有哪些演化途径?6.叙述极位夹角的定义。
7.叙述行程速比系数的定义。
8.画出曲柄滑块机构极为夹角。
9.画出摆动导杆机构极为夹角。
10.叙述求法瞬心的一般步骤。
11.熟练运用相对运动图解法求解特殊位置的四杆机构、六杆机构的运动。
12.叙述压力角和传动角的定义。
13.叙述压力角的含义。
14.画出三种典型机构压力角/传动角。
15.画出三种典型机构γmin。
16.叙述出现死点位置的条件。
17.叙述死点的位置特征。
18.已知机构简图、各摩擦角ϕ、摩擦园半径ρ、阻力F R。
试画出各运动副静力图。
19.掌握刚体引导机构综合、掌握函数发生器综合、掌握按行程速比系数综合。
二、习题1. 试求图示各机构在图示位置时的全部瞬心的位置。
2. 在图示的机构中,已知各构件长度(机构比例尺μL=实际构件长度/图上长度=0.002m/mm),原动件以等角速度ω1 =10 rad/s逆时针转动,试用图解法求在图示位置时点E的速度v E 和加速度a E,构件2 的角速度ω2和角加速度α2。
建议取:μv=0.005(m/s)/ mm;μa=0.05(m/s2 )/ mm。
3 在图示的机构中,已知各构件长度(μL=0.002m/mm),原动件以等角速度ω1=10 rad/s逆时针转动,试用图解法求点D的速度v D和加速度a D。
建议取:μv=0.03(m/s)/mm;μa=0.6(m/s2)/mm。
4 在图示的机构中,已知各构件长度(μL)以及原动件以等角速度ω1逆时针转动,试用图解法求构件3的角速度ω3和角加速度α3。
5 在图示的摇块机构中,已知各构件长度(μL=0.002m/mm),原动件以等角速度ω1 =10 rad/s顺时针转动,试用图解法求点E的速度v E和加速度a E。
重庆大学机械原理章节习题库 第三章习题
.. 第三章 习题3-1 题图3-1所示为从动件在推程的部分运动线图,凸轮机构的Φs ≠0,Φs '≠0,根据s 、v 和a 之间的关系定性地补全该运动线图,并指出该凸轮机构工作时,在推程哪些位置会出现刚性冲击?哪些位置会出现柔性冲击?3-2 题图3-2所示为凸轮机构的起始位置,试用反转法直接在图上标出:1) 凸轮按ω方向转过45︒时从动件的位移;2) 凸轮按ω方向转过45︒时凸轮机构的压力角。
3-3 题图3-3所示的对心移动滚子从动件盘形凸轮机构中,凸轮的实际廓线为一圆,圆心在A 点,半径R =40mm ,凸轮转动方向如图所示,l OA =25mm ,滚子半径r r =10mm ,试问:1) 凸轮的理论轮廓曲线为何种曲线?2) 凸轮的基圆半径r b =?3) 在图上标出图示位置从动件的位移s ,并计算从动件的升距h =?4) 用反转法作出当凸轮沿ω方向从图示位置转过90︒时凸轮机构的压力角,并计算推程中的最大压力角αmax =?5) 若凸轮实际轮廓曲线不变,而将滚子半径改为15mm ,从动件的运动规律有无变化?3-4 设计一偏置移动滚子从动件盘形凸轮机构。
已知凸轮以等角速度ω 逆时针转动,基圆半径r b =50mm ,滚子半径r r =10mm ,凸轮轴心偏于从动件轴线左侧,偏距e =10mm ,从动件运动规律如下:当凸轮转过120︒时,从动件以余弦加速度运动规律上升30mm ;当凸轮接着转过30︒时,从动件停歇不动;当凸轮再转过150︒时,从动件以等加速等减速运动规律返回原处;当凸轮转过一周中的其余角度时,从动件又停歇不动。
3-5 在题图3-5所示的凸轮机构中,已知摆杆AB 在起始位置时垂直于OB ,l OB =40mm ,l AB =80mm ,滚子半径r r =10mm ,凸轮以等角速度ω 顺时针转动。
从动件运动规律如下:当凸轮转过180︒时,从动件以正弦加速度运动规律向上摆动30︒;当凸轮再转过150︒时,从动件又以正弦加速度运动规律返回原来位置;当凸轮转过其余30︒时,从动件停歇不动。
重庆大学机械原理模拟试题
更多资料请访问.(.....)模拟题一一.计算图示机构自由度,指明复合铰链,局部自由度,和虚约束所在;进行高副低代,然后拆分杆组,判断机构的级别。
(20分)二.在图示的机构中,已知各构件长度,原动件以等角速度w1=10 rad/s 逆时针转动,试用图解法求点D的速度。
(20分)三. 1.图示铰链四杆机构中,已知各构件的长度l AB=25mm,l BC=55mm,l CD=40mm,l AD=50mm,试问:(15分)(1)该机构是否有曲柄,如有,请指出是哪个构件;(2)该机构是否有摇杆,如有,请指出是哪个构件;(3)该机构是否有整转副,如有,请指出是哪个转动副;2.设计一铰链四杆机构,如图所示,已知行程速比系数K=1,机架长L AD=100mm,曲柄长L AB=20mm,当曲柄与连杆共线,摇杆处于最远的极限位置时,曲柄与机架的夹角为30°,确定摇杆及连杆的长度。
(20分)四.图示机构的凸轮轮廓线由两段直线和两段圆弧组成。
(1)画出偏距圆;(2)画出理论廓线;(3)画出基圆;(4)画出当前位置的从动件位移s ;(5)画出当前位置的凸轮机构压力角;(6)画出从动件升程h 。
(7)凸轮的推程角φ,近休止角φs ’,回程角φ’(20分)五.一对正常齿制规范安装的外啮合规范直齿圆柱齿轮传动,已知传动比i=2.5,中心距a=175mm ,小齿轮齿数z1=20,压力角α=20°。
试计算模数m 、大齿轮的几何尺寸基圆直径,齿顶圆直径和齿根圆直径。
(20分)六.图示轮系各轮的齿数已在括号中标注,已知主动轮1的转速为每分钟1转、主动轮4的转速为每分钟2转,转向如图所示。
试求输出构件H 的转速和转向。
(20分)(25) 3(30)2'4 (90)1(25)2 (30)3'(20)n 1 n 4H七.图示减速器,已知传动比i=z2/z1=3,作用在大齿轮上的阻力矩随大齿轮的转角φ2变化,其变化规律为:当0<=φ2<=120°时,阻力矩为M2=300N•m;当120°<=φ2<=360°时,阻力矩为M2=0,又已知小齿轮的转动惯量为J1,大齿轮的转动惯量为J2。
重庆大学2010年硕士研究生《机械原理》试题参考答案
一、平面机构结构分析(20 分)
C
1DLeabharlann 24D3 C 5
E E
3
B
4
F G
6
F
2
A
5
G
6
H
7
B J 8
1
H
图 1-1
1.(1)在图 1-1 中:
J 7
I
I
图 1-2
K
9 O
A
n 7 , pl 10 , ph 0 , p' 0 , F ' 0 ,则
F 3n (2 pl ph p' ) F ' 1。
(2)在图 1-2 中:
n 9 , pl 12 , ph 1, p' 0 , F ' 1( K处是局部自由度) ,则
F 3n (2 pl ph p' ) F ' 1。
2.(1)高副低代后的机构运动简图:
五、轮系(20 分)
VC = 方向: 大小:
? FC
VB
AB
+
VCB
BC
P(a,f)
?
VD = 方向: 大小:
? FD
VB
AB
+
VDB
BD
?
b
VE = 方向: 大小:
?
VC
如 图
+
VEC=
CE
VD
如 图
+
VED
DE
d
c
?
?
?
e
3.(20 分)
180 ( K 1) 180。 (1.4 1) 30 K 1 1.4 1
重庆大学2017-2018学年《机械原理》课程试卷
重庆大学 《机械原理》 课程试卷juanA卷B卷2017 ~2018学年 第1学期 开课学院:机械工程 课程号:11023730 考试日期:考试方式:开卷闭卷 其他 考试时间:120分钟一、 结构设计题(共20分)⒈计算图示系统自由度,并在图中标明虚约束、复合铰链、局部自由度。
(8分)题一 1 图 题一 2 图2.分别以AB 、DE 为原动件对图示机构进行结构分析,要求画出原动件、基本组,并指出机构的级别。
(8分)3.试对图示机构进行高副低代,要求画出替代机构。
(4分)题一 3 图二、 连杆机构设计题(共30分)1.标出图示机构的所有瞬心。
(6分)2.试画出图示机构的最小传动角 min 。
(4分)命题人:宁先雄 组题人:宁先雄审题人:命题时间:2007-12-6教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密题二 1 图题二 2 图3.试画出3种从动件具有急回运动特性的平面四杆机构的示意图,并写出机构名称及各构件尺寸应满足的条件。
(8分)4.图示平底摆动从动件盘状凸轮机构的凸轮为圆盘,摩擦圆、摩擦角、驱动力矩Md 、阻力FR如图所示。
试画出图示机构的静力分析图。
(6分)题二 4 图5.已知曲柄滑块机构的行程速比系数K=1.25、滑块行程H=250mm、偏距e=50mm。
试用图解法设计该机构。
要求画出设计图(不写作图过程)、写出极位夹角θ、曲柄长度a和连杆长度b的计算式和计算结果。
建议作图比例尺为μL=0.01m/mm。
(6分)三、齿轮机构题(10分)一对正常齿制标准安装的外啮合直齿圆柱齿轮传动,已知传动比 i=2.5,中心距a=175mm,小齿轮齿数z1=20,压力角α=20°。
试计算模数m、大齿轮的几何尺寸r2、rb2、 ra2和rf2。
四、凸轮机构题(10分)图示机构的凸轮轮廓线由两段直线和两段圆弧组成。
(1)画出偏距园;(2)画出理论廓线;(3)画出基园;(4)画出当前位置的从动件位移s;(5)画出当前位置的凸轮机构压力角α;(6)画出从动件升程h;(7)标注凸轮转向并说明原因。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虚约束的作用 ⑴ 改善构件的受力情况,分担载荷或平衡惯性力,如多 个行星轮。 ⑵ 增加结构刚度,如轴与轴承、机床导轨。 ⑶ 提高运动可靠性和工作的稳定性。
注意 机构中的虚约束都是在一定的几何条件下出现 的,如果这些几何条件不满足,则虚约束将变成实际有效的 约束,从而使机构不能运动。
.
11
机构的结构分析 基本思路 驱动杆组 基本杆组
虚拟构件
.
15
举例 作出下列高副机构的低副替代机构
C
B
B
D 高副低代
A A
E
C D
E
.
16
例题 平面机构结构分析 1. 计算图示机构的自由度,并指出其中是否含有复合铰 链、局部自由度或虚约束; 2. 该机构如有局部自由度或虚约束,说明采用局部自由 度或虚约束的目的;
3. 画出图示瞬时该机构高副低代后的机构运动简图; 取 与机构自由度数相同数目的连架杆为原动件,对机构进行结 构分析,要求画出机构的驱动杆组和基本杆组,并指出机构 的级别。
自由度。
考虑局部自由度时的机构自 由度计算
设想将滚子与从动件焊成一体 F322211
计算时减去局部自由度FP F332311(局部自由度)1
.
5
● 虚约束 机构中不起独立限制作用的重复约束。 计算具有虚约束的机构的自由度时,应先将机构中引入虚
约束的构件和运动副除去。
.
6
虚约束发生的场合 ⑴ 两构件间构成多个运动副
机构
由原动件和机架组 成,自由度等于机 构自由度
不可再分的自由 度为零的构件组 合
.
12
基本杆组应满足的条件
F3n2pL0 即 n (23)pL 基本杆组的构件数 n 2,4,6,… 基本杆组的运动副数 pL 3,6,9,…
⑴ n2,pL3的双杆组(II级组)
内接运动副
外接运动副 R-R-R组 R-R-P组
B
.
D5
F
46
1E
7
C
2 3
8
A
3
准确识别复合铰链举例 关键:分辨清楚哪几个构件在同一处用转动副联接
12
3 两个转动副
12
3 4
两个转动副
1 3
2
4 两个转动副
31
2
1
2
4
3
3
两个转动副
4
两个转动副
.
1 2
两个转动副
4
例题 计算凸轮机构自由度 F3n2pLpH332312 ?
● 局部自由度 机构中某些构件所具有的仅与其自身的局部运动有关的
.
17
解 K处为局部自由度,B处为复合铰链,移动副H、H之一 为虚约束。
n8,pL11,pH1, F3n2pLpH38211111。
高副低代
虚拟构件
L
L
8
H
I 7
H
K
J
F
5
E 4
B
2
6G C
8
H I H 7
K
F
5
E 4
9 B
2
6G C
1
3
1
3
A
D
A
D
.
18
拆分基本杆组
L
8
H
I H 7
K
6G
F
5
E9 4B
一、平面机构的结构分析
运动链成为机构的条件 运动链成为机构的条件是:取运动链中一个构件相对固 定作为机架,运动链相对于机架的自由度必须大于零,且原 动件的数目等于运动链的自由度数。 满足以上条件的运动链即为机构,机构的自由度可用运 动链自由度公式计算。
平面运动链自由度计算公式为
F3n2pLpH
.
1
例题 圆盘锯机构自由度计算 解 n7,pL6,pH0
R-P-R组 . P-R-P组
R-P-P组 13
⑵ n4,pL6的多杆组 ① III级组
结构特点 有一个三副构件,而每个内副所联接的分支 构件是两副构件。
.
14
高副低代
接触点处两高副元素
接触点处两高副元素
的曲率半径为有限值
之一的曲率半径为无穷大
O1 r1 高副低代
r2 O2
O1
r2
O2
高副低代
虚拟构件
180º
C1
D
极位夹角 —机构输出构件处于两极限位置时,输入构
件在对应位置所夹的锐角。
工作行程(慢行程) 曲柄转过180º,摇杆摆角,耗
时t1,平均角速度m1 t1 返回行程(快行程) 曲柄转过180º,摇杆摆角,耗
时t2,平均角速度m2 t2
.
21
常用行程速比系数K来衡量急回运动的相对程度。
1Байду номын сангаас0º+
两构件构成多个 导路平行的移动副
两构件构成多个 两构件构成多个接触 轴线重合的转动副 点处法线重合的高副
.
7
⑵ 两构件上某两点间的距离在运动过程中始终保持不变
B
2
C
AB CD
1
AE EF A
4
3
D
E
5
F
未去掉虚约束时
F3n2pLpH34260 ?
构件5和其两端的转动副E、F提供的自由度
F3122 1
A
C2
B1
B2
180º-
C1
D
K m m 1 2 //tt1 2 1 8 01 8 0 1 1 8 8 0 0
设计具有急回要求的机构时,应先确定K值,再计算。
K1180
K1 .
22
曲柄滑块机构的极位夹角
摆动导杆机构的极位夹角
180º 180º
2
C
1
3
A
D
II级机构
.
19
二、平面连杆机构的基本性质 1. 四杆机构中转动副成为整转副的条件 ⑴ 转动副所连接的两个构件中,必有一个为最短杆。 ⑵ 最短杆与最长杆的长度之和小于或等于其余两杆长度 之和。
.
20
2. 急回运动特性
极限位置1 连杆与曲柄拉伸共线
180º
A
C2
B1
极限位置2
B2
连杆与曲柄重叠共线
即引入了一个约束,但这个约束对机构的运动不起实际
约束作用,为虚约束。去掉虚约束后
F 3n2pLpH. 33241
9
⑷ 机构中对传递运动不起独立作用的对称部分
2B
3
4
1
A
DC
2 2
B
3 2
4
1
A
对称布置的两个行星轮2和2以及相应的两个转动副D、 C和4个平面高副提供的自由度
F322214 2 即引入了两个虚约束。 未去掉虚约束时 F 3n2pLpH352516 1 去掉虚约束后 F 3n2.pLpH3323121 10
即引入了一个约束,但这个约束对机构的运动不起实际 约束作用,为虚约束。去掉虚约束后
F3n2pLpH3.3241
8
⑶ 联接构件与被联接构件上联接点的轨迹重合
BEBC=AB EAC=90
3E 2B
1
5
A4
C
构件2和3在E点轨迹重合 构件3与构件2组成的转动副E及与机架组成的移动副提 供的自由度
F3122 1
F3n2pLpH37269 错误的结果!
B
计算错误的原因
两个转动副
D5
F
46
1E
7
C
2 3
8
A
.
2
计算机构自由度时应注意的问题 ● 复合铰链
两个以上的构件在同一处以转动副联接所构成的运动副。 k个构件组成的复合铰链,有(k-1)个转动副。
正确计算 B、C、D、E处为复合铰链,转动 副数均为2。
n7,pL10,pH0 F3n2pLpH372101