多机调度问题
算法之多机调度问题

}
for(i=m+1;i<=n;i++)
{
for(int k=1;k<m;k++)
{
int o=d[k];
if (o>d[k+1])
{
o=d[k+1];
j=k+1;
}
}
s[j]|=(1<<(p[i]-1));
d[j]=d[j]+t[i];
}
}
void Output(int *p,int n,int *s,int *d,int m) //阅读并理解这个函数
Dsc_Order_By_t(t,p,n); //对作业根据运行时间t进行降序排列
Processing(p,t,n,s,d,m); //用最长运行时间优先算法处理作业
Output(p,n,s,d,m); //输出结果
_getch();
return 0;
}
运行结果图:
t[]={0,2,14,4,16,6,5,3}, //对应作业时间,t[0]不用
s[]={0,0,0,0}, //机器处理的作业集合,如:s[1]存放机器处理过的作业号,s[0]不用
d[]={0,0,0,0}; //机器处理作业的总时间,如:d[2]存放机器处理过的作业的总时间,d[0]不用
int n=sizeof(p)/sizeof(int)-1,m=sizeof(s)/sizeof(int)-1; //n--作业总数,m--机器台数
算法之多机调度问题
用贪心法解决多机调度问题
(1)问题的描述
设有n个独立的作业{1, 2,…, n},由m台相同的机器{M1, M2,…, Mm}进行加工处理,作业i所需的处理时间为ti(1≤i≤n),每个作业均可在任何一台机器上加工处理,但不可间断、拆分。多机调度问题要求给出一种作业调度方案,使所给的n个作业在尽可能短的时间内由m台机器加工处理完成。
扫地机器人的多任务调度与优化

扫地机器人的多任务调度与优化扫地机器人是一种能够自主清扫室内地面的智能机器人。
它可以代替人工进行日常的清扫工作,大大提高了工作效率和清洁质量。
然而,由于它们只能完成单一任务,扫地机器人的调度和优化是一个具有挑战性的问题。
一、扫地机器人的调度问题扫地机器人的调度是指如何合理安排机器人的工作顺序和路径规划,使其能够高效地完成清扫任务并节省时间和资源。
1.1 任务优先级不同的房间或区域可能具有不同的优先级,需要根据实际情况进行调度。
比如,在客厅和卧室之间选择时,通常会优先清扫客厅,因为客厅是客人的接待区域。
1.2 任务分解对于大型空间,将其分解成小块进行清扫是更加高效的方法。
机器人可以按照规定的路径或者自主选择路径进行清扫,从而减少回头和冗余的清扫。
1.3 坐标规划机器人需要根据地图或者传感器数据确定自身位置,并规划最优路径。
通过使用定位技术(如视觉识别、激光测距等),可以更准确地获得机器人的位置信息,从而实现更好的路径规划和调度。
二、扫地机器人的优化问题在完成单一任务的基础上,进一步优化扫地机器人的调度和工作方式,可以提高工作效率和节省资源。
2.1 能耗优化扫地机器人的电池寿命通常有限,因此需要在保证清扫质量的前提下尽量减少能耗。
通过优化调度算法,可以减少机器人的移动距离和频率,以降低能耗。
2.2 时间优化时间是一种宝贵的资源,对于扫地机器人来说也是如此。
通过合理的调度和路径规划,可以减少清扫时间,提高效率。
比如,机器人可以根据历史数据预测用户在不同时间段的活动区域,提前清扫这些区域。
2.3 故障处理扫地机器人在工作时可能会遇到各种故障,如意外碰撞、掉落等。
为了提高系统的稳定性和可靠性,需要考虑如何在故障发生时快速响应并处理。
例如,机器人可以配备传感器来检测障碍物并避开,或者自动返回充电站进行维修。
三、结论扫地机器人的多任务调度与优化是一个具有挑战性的问题。
通过合理的调度和算法优化,可以使机器人更高效地完成清扫任务并节省时间和资源。
解并行多机提前/拖后调度问题的并行遗传算法

a g rt m b s d n e t n l xe d d e mu a o c d n s h me s u g se .h c ig lo h i a e o s c o a e tn e p r tt n— o i g c e i i i s g e t dT e o n me h c l e e t h d to d a r f c te l l s h d l g o iy a d o c e u i p l n c mmo d e a e i l n o s a d h e me o s s c a t e e e ai n f h e n t n c n u d t smu t e u l n t s a y, e h t d ,u h s h g n r t o t i i a o i l o ua o ,r sv r a d p p l t n c s o e n mu to a e a s s ac e . o s e n e r q i me t f a a t g i t i id f l g r i o a t in, r o r e r h d C n i r g t l e di h e ur e ns o d p i t o t s k n o a e n h s ae p b e a d r a - i c e u i g i i a al l mpe n e n e e mo e f ma tr s v o to ewok . c r lm n e l t l o me s h d l ,t s p l l i l me t d u d r t d o se - l e c n r l n t r s n r ey h a h o u i a e u t h w t t t e iin , n i T e c mp tt n r s l s o a i s f ce t a d s d a t g o s v r h u si r c d r s n c mmo g n t a ol s h i a v a e u o e e r t p e u a d o n i c o e n ee c i ag rt ms a d a mu h et r a al l h r c e s c , d s i fr a g r c e o i e t a p r l l l o h , n h s i c b t p l c a a tr t s a i f o lr e s a n n- d n i l a al ma h n e r e ii n t l c e c ie
工厂生产排程与调度算法分析

工厂生产排程与调度算法分析随着生产自动化水平的提高,工厂的生产排程与调度变得越来越重要。
正确的排程与调度可以极大地提高生产效率,降低成本,增加利润。
因此,工厂生产排程与调度算法成为了一个研究热点。
本文将从调度算法的角度来分析工厂生产排程与调度。
一、调度问题的定义所谓调度,指的是将一定数量的任务分配到一定数量的处理器上,以使得完成这些任务的时间最短或机器利用率最高。
调度问题可分为两类:流水车间调度和非流水车间调度。
所谓流水车间调度,是指生产线作业的排程问题;所谓非流水车间调度,是指无工序前后关系(即两个任务之间与其顺序无关)的多机调度问题。
二、调度算法相应地,调度算法也可分为两类:流水车间调度算法和非流水车间调度算法。
其中,流水线调度算法又可分为单机和多机两类。
2.1 单机调度算法在单机调度算法中,任务的完成时间是由单个机器完成的时间决定的。
其中,最短工序时间优先算法(SPT)是目前最常用的单机调度算法之一。
其算法思路如下:首先,按照任务的工序时间大小排序,选择工序时间最短的任务,将它分配给机器;然后重复以上操作,知道所有任务都被分配完毕。
SPT算法具有简单、易实现的特点,同时在任务处理数量较小时也能够得到不错的效果。
2.2 多机调度算法在多机调度算法中,多个机器同时处理任务,任务的完成时间取决于处理速率最慢的机器。
而且,多机调度算法所涉及到的问题,一般都有前后件关系。
解决多机调度算法需要的算法有很多,比如距离平方优先算法(DDU)、加权费用的扩展岛算法(EI)、加权条带算法(applying Weighted Strip Packing, AWSP)等。
其中,DDU算法是一种启发式算法,根据任务的层级和距离来构造解的空间,然后搜索这个空间;EI算法是应用动态规划的思想,拉直排成长条,将任务分配到短条上去完成;AWSP算法则是基于贪心思路,优先将最紧急的任务分配到可处理它们的机器上。
三、调度实践上述调度算法可以用于实践中。
双机流水作业调度问题(Johnson算法)
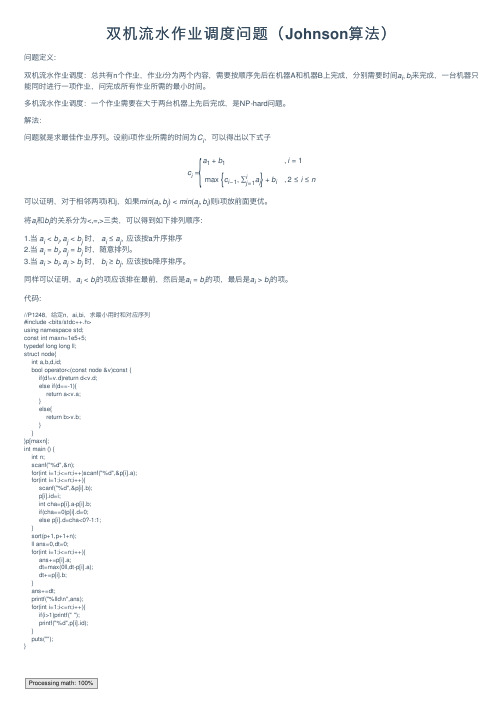
双机流⽔作业调度问题(Johnson算法)问题定义:双机流⽔作业调度:总共有n个作业,作业i分为两个内容,需要按顺序先后在机器A和机器B上完成,分别需要时间a i,b i来完成,⼀台机器只能同时进⾏⼀项作业,问完成所有作业所需的最⼩时间。
多机流⽔作业调度:⼀个作业需要在⼤于两台机器上先后完成,是NP-hard问题。
解法:问题就是求最佳作业序列。
设前i项作业所需的时间为C i,可以得出以下式⼦c i=a1+b1,i=1 max c i−1,∑i j=1a j+b i,2≤i≤n可以证明,对于相邻两项i和j,如果min(a i,b j)<min(a j,b i)则i项放前⾯更优。
将a i和b i的关系分为<,=,>三类,可以得到如下排列顺序:1.当a i<b i,a j<b j时,a i≤a j,应该按a升序排序2.当a i=b i,a j=b j时,随意排列。
3.当a i>b i,a j>b j时,b i≥b j,应该按b降序排序。
同样可以证明,a i<b i的项应该排在最前,然后是a i=b i的项,最后是a i>b i的项。
代码:{{}//P1248,给定n,ai,bi,求最⼩⽤时和对应序列#include <bits/stdc++.h>using namespace std;const int maxn=1e5+5;typedef long long ll;struct node{int a,b,d,id;bool operator<(const node &v)const {if(d!=v.d)return d<v.d;else if(d==-1){return a<v.a;}else{return b>v.b;}}}p[maxn];int main () {int n;scanf("%d",&n);for(int i=1;i<=n;i++)scanf("%d",&p[i].a);for(int i=1;i<=n;i++){scanf("%d",&p[i].b);p[i].id=i;int cha=p[i].a-p[i].b;if(cha==0)p[i].d=0;else p[i].d=cha<0?-1:1;}sort(p+1,p+1+n);ll ans=0,dt=0;for(int i=1;i<=n;i++){ans+=p[i].a;dt=max(0ll,dt-p[i].a);dt+=p[i].b;}ans+=dt;printf("%lld\n",ans);for(int i=1;i<=n;i++){if(i>1)printf(" ");printf("%d",p[i].id);}puts("");}Processing math: 100%。
多产品批处理的多机并行调度问题研究
产线 L l : 2
线L 2 : N ,
对 多产品批处理 的多机并 行调度问题作如下假设 : ( 1 )每个订单 只包 含一种产 品,并指定交货期 、生产数量 ;
( 2 )每种产 品可以在多台机器上生产 ; ( 3 )生产 中不 允许 出现 中断 ; ( 4 )每一次生产都 以最大容量生产 ,不够最 大容量仍组织一次生产 ;
表 1 变量参数定义
符 号 符号索 引
订 单
定 义
符 号
J 产 线
定 义
订单 的子单
p 产 品
决策 变量
畸 W 嘶= 1
0 ,订单பைடு நூலகம்i 的子单 k 不在产线 , 上生产 订单 。 的子单 k 在产线_ 『 上 生产
,
订单 i 的子 单 在产 线 J . 上 开始 生 产时间 D 订单 i 的交货期
订 单 i中产 品P的单位 库存持 有 成 日 £ 表 订 单 中延期 惩罚 系数
S 订单i 在 产线 上 生产 的启动 费用
c p
,
订单i 对应产 品最大生产批 次容 量
N O 订单 i 对应 产品的生产数 量 参数 N B
I
订单i 的生 产批次N B i = N O . / c P ,
多 产 品 批 处 理 的 多机 并行 调 度 问题 研 究
体 基 因 则 为 ( m k , 1 k 2 = = = m k N ) , 其 中 第 一 行 为 随 机 排 列 的 任 务 , 第 二 行 为 任 务 的 产 线 编 号 , 任 务 间 的 加 工 顺 序 则 遵 循 在 基 因 第
G 订单 i 的完成时间C i = m a x { C a 1
多机调度问题贪心算法c语言
多机调度问题贪心算法c语言一、引言多机调度问题是指将一组作业分配给多台机器,使得完成所有作业的时间最短。
在实际生产中,多机调度问题是一个常见的优化问题。
贪心算法是解决多机调度问题的一种有效方法。
本文将介绍贪心算法在C语言中的应用。
二、问题描述假设有n个作业需要分配给m台机器进行加工处理,每个作业需要的时间不同,每台机器的处理速度也不同。
现在需要设计一个算法,将这些作业分配给这些机器进行加工处理,并使得完成所有作业所需时间最短。
三、贪心算法思路贪心算法是一种基于局部最优解来构造全局最优解的思想。
对于多机调度问题,我们可以采用以下贪心策略:1. 将所有作业按照所需时间从大到小排序;2. 将第一个作业分配给第一台机器;3. 对于剩余的作业,选择当前处理时间最短的那台机器进行分配;4. 重复步骤3直到所有作业都被分配完毕。
四、C语言实现下面是C语言实现多机调度问题贪心算法的代码:#include <stdio.h>#include <stdlib.h>#define MAX_JOB 1000#define MAX_MACHINE 1000int cmp(const void *a, const void *b) {return *(int *)b - *(int *)a;}int main() {int n, m, job[MAX_JOB], machine[MAX_MACHINE] = {0}; scanf("%d%d", &n, &m);for (int i = 0; i < n; i++) {scanf("%d", &job[i]);}qsort(job, n, sizeof(int), cmp);for (int i = 0; i < n; i++) {int min_time = machine[0], min_index = 0;for (int j = 1; j < m; j++) {if (machine[j] < min_time) { min_time = machine[j]; min_index = j;}}machine[min_index] += job[i]; }int max_time = machine[0];for (int i = 1; i < m; i++) {if (machine[i] > max_time) { max_time = machine[i];}}printf("%d\n", max_time);return 0;}五、代码解析1. 宏定义和头文件引入:```#define MAX_JOB 1000#define MAX_MACHINE 1000#include <stdio.h>#include <stdlib.h>```定义了最大作业数和最大机器数,并引入了标准输入输出库和标准库。
多机相关任务调度的优化策略与组织方法
多机相关任务调度的优化策略与组织方法
多机型任务调度是指将一项任务分解成许多小任务,分别在不同机器上进行调度处理。
多
机型任务调度综合考虑了多机型系统中的资源分配、任务负荷均衡和处理时间控制等因素,有效提高了协作办公效率,改善了传统任务调度的效率和秩序。
优化策略:
1、使用调度优化算法:这种算法可以有效减少多机型任务执行时间,实现高效的调度优化。
2、负载和时间间隔均衡:在多机型任务中负荷和时间间隔均衡是一个比较重要的因素,
但是一般来说负荷会产生时间间隔的不平衡。
因此,可以使用一定的策略来减缓负载和时
间间隔的波动,以提高多机型任务调度的效率。
3、优先级排序:优先级排序是按照不同任务之间的关联性给出任务之间的执行顺序,并
将被调度的任务优先放在低优先级的机器中,以提高调度效率。
4、异步消息传递:异步消息传递是一种非常重要的机制,可以用来避免多机型任务中的
排错和冲突,防止任务在机器之间出现紊乱,大大提高了任务调度的效率。
以上就是多机型任务调度优化策略及组织方法,采用此类优化策略及组织方法,可以有效
提高多机型任务调度的效率,改善传统任务调度流程的效率和秩序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多机调度问题要求给出一种作业调度方案,使所给的n 个作业在尽可能短的时间内由m台机器加工处理完成。
约定,每个作业均可在任何一台机器上加工处 理,但未完工前不允许中断处理,作业不能拆分成 更小的子作业。
例如,设7个独立作业{1,2,3,4,5,6,7}由3台机器 M1,M2和M3加工处理。各作业所需的处理时间分别为 {2,14,4,16,6,5,3}。
实例:
m=3,作业时间(3,4,3,6,5,3,8,4)
这个问题是NP完全问题,到目前为止还没有 有效的解法。
采用最长处理时间作业优先的贪心选择策略可以 设计出解多机调度问题的较好的近似算法。
当n≤m时,只要将机器i的[0, ti]时间区间分配给作 业i即可,算法只需要O(1)时间。 当n>m 时,首先将n个作业依其所需的处理时间 从大到小排序。然后依此顺序将作业分配给空闲的处 理机。算法所需的计算时间为O(nlogn)。