步进电机实用案例
步进电机驱动电路性能比较和电路实例步进伺服

步进电机驱动电路性能比较和电路实例 -步进伺服1、性能比较比较上述驱动电路的基本性能可概括如下。
1)单极性驱动电路:这里指单电源、单极性驱动电路,每相只用一只功率管。
线路简洁、成本低,但效率也低,启动和运行频率均不高。
现常用来驱动小功率步进电机。
2)双极性驱动电路:线路简单,效率高。
常用来驱动永磁式电机、混合式电机或大功率电机。
3)凹凸压驱动电路:线路较简洁。
双电源,每相需要两只功率管。
效率较高,启动和运行频率比单极性电路高。
4)斩波驱动电路:双电源成高压单电源。
运行特性好,效率高,但线路简单。
5)调频调压驱动电路:把握电路较简单。
由于V随f转变,所以,效率、运行特性等都有了明显改善。
6)细分驱动电路:线路简单。
运行特性好。
微机的应用已使它成为很有进展前途的驱动方式之一。
2、驱动电路实例1)图1是斩波驱动的一个应用实例。
被驱动的电机是36By3-30型三相步进电机。
它的A、B、C三相分别接在图示电路的A、B、C端。
A、B、C三端的输入分别接电路的D03、D02、DO1。
该电路有两种工作状态:(1)步进方式;(2)维持方式。
处在步进工作方式时,流过取样电阻R0和相绕组上的电流为2A;处在维持方式时,仅为0.5A。
工作方式的转换受程序把握。
该程序送“1”给DO5时,则为步进方式。
送“0”时,为维持方式。
图1 斩波驱动应用实例实际上,是用DO5电位的凹凸转变比较器比较基准端“2”的电位。
DO5电位高,“2”端电位抬高,则比较器“3”端的翻转电位也随之提高。
即取样电阻R0上的电压随之提高,流过R0的平均电流相应增大。
反之,‘2”端电位降低,流过R0的平均电流相应减小。
斩波驱动由比较器、比较器后面的放大电路、L、C、R等电路形成。
假设比较器的“3”端电位高于“2”端,它的输出为低电位。
由三极管组成的放大电路截止,加到相绕组上的电压逐步衰减,流过R0上的电流和iR0也随之降低。
经过肯定时间后,“3”端电位低于“2”端。
步进电机原理应用范围案例__看完这个你就是步进的高手
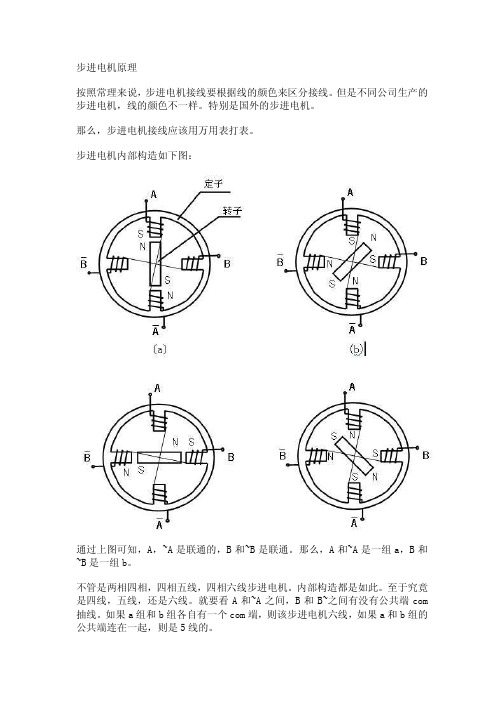
步进电机原理按照常理来说,步进电机接线要根据线的颜色来区分接线。
但是不同公司生产的步进电机,线的颜色不一样。
特别是国外的步进电机。
那么,步进电机接线应该用万用表打表。
步进电机内部构造如下图:通过上图可知,A,~A是联通的,B和~B是联通。
那么,A和~A是一组a,B和~B是一组b。
不管是两相四相,四相五线,四相六线步进电机。
内部构造都是如此。
至于究竟是四线,五线,还是六线。
就要看A和~A之间,B和B~之间有没有公共端com 抽线。
如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。
所以,要弄清步进电机如何接线,只需把a组和b组分开。
用万用表打。
四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。
所以,用万用表测,不连通的是一组。
五线:由于五线中,a和b组的公共端是连接在一起的。
用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。
对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。
六线:a和b组的公共抽线com端是不连通的。
同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。
对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。
步进电机相关概念:相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。
四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
步进电机应用案例
11
19
高速贴标系统
11
20
高速贴标系统---结构示意图
11
21
电子导纱精密络筒控制系统
11
22
主要控制部件及功能
11
24
11
25
பைடு நூலகம் 11
26
11
27
这个电路图是最初的设计,现在做了些少改动:
1. C1改为0.2 uF ,而不是0.1。
2. 在12V电源供电端的两端有一个470 uF电容。
3. 使用了7805来稳压,提供给逻辑电路(5 V),在 电路图上没有画出。
4. 使用的电机为:hompson / Airpax steppers。
步进电动机应用案例(1)
步进电机在核素注射器中的应用
(1)图像采集与人工推注不同步,从而造成 动态图像的部分丢失;
(2)在检查人体血管或脏器的功能时,造影剂 的推注要求以“弹丸”的方式注射,而人工注 射达不到“弹丸”的目的,造成无法跟踪造影 剂的瞬间灌注过程,出现造影剂的“拖尾”现 象;
(3)传统的核素推注过程要求操作人员长时间
11 《EEPN》,1997,(1160)
步进电机与伺服控制器
由BSL工程推出的新型BDS-E伺服机构,具有简 易的执行系统。该系统装置中仅采用一控制器,它是 步进电机与伺服技术的有机组合。BDS-E伺服机构 的系统积分电路,在提高现有自动化方面特别有效地 利用了成本。允许以高性能的伺服机构取代步进电机, 而勿需设置复杂的伺服控制器。成套密封的BDS-E 伺服装置,利用驱动器和电动机的各种组合,提供高 达5000r/min的转速,峰值转矩达到14Nm。由标准 的230V交流电源直接联机操作, 且不需要附加的变 压器,电源或外部滤波装置等。
实例:步进电机控制系统

1. 步进电机控制原理 2. 步进电机控制程序设计 3 .步进电机变速控制
+27V
8031
A11 ~ A8
2732
A7 ~
A0 ~D7
D0 CE OE
G ~Q7~D7
Q0 D0 OE
P2.3 ~
P2.0
AL
E
P1.0
~D7
D0
P1.1
PSEN P1.2
MLA
1K 15 K
中断服务程 序
保护现场
设频率阶梯计数器
输出控制模型
设阶梯步长计数器
模型地址增1模型结束? Y转向标志为1?Y
恢复模型首
N 设置正转模型地址
设置反转模型 地址
N
址
阶梯步长为 Y
设置定时器
0?
频率阶梯为 Y
N
阶梯N步0?长赋值
CPU开中断
T0初值地址更
N
频率阶梯为0?
CPU关中Y断
新
是升频?
N
Y
赋升频T0初值 赋降频T0初值
MLB
1K 15 K
MLC
1K 15 K
7406
图. 单片机控制三相步进电机原理图
1. 步进电机控制原理
三相步进电机的通电方式有: (1)三相三拍通电方式: A→B→C→A。 (2)三相双三拍通电方式:AB→BC→CA→AB。 (3)三相六拍通电方式:
A→AB→B→BC→C→CA。 按以上顺序通电,步进电机正转。 要使电机反转,将上述步进电机各相绕组的通电 相序反过来即可。 如三相三拍反转的通电方式为:A→C→B→ A。
和2DH中存放模型结束标志,程序流程如图所 示。
步进电机应用案例
高速贴标系统
高速贴标系统---结构示意图
电子电机控制器
导纱步进电机 导纱编码器
University of Connecticut的 Martin D. Fox教授 设计的步进电机的驱动电路,
由BSL工程推出的新型BDS-E伺服机构,具有简易的执行系统。该系统装置中仅采用一控制器,它是步进电机与伺服技术的有机组合。BDS-E伺服机构的系统积分电路,在提高现有自动化方面特别有效地利用了成本。允许以高性能的伺服机构取代步进电机,而勿需设置复杂的伺服控制器。成套密封的BDS-E伺服装置,利用驱动器和电动机的各种组合,提供高达5000r/min的转速,峰值转矩达到14Nm。由标准的230V交流电源直接联机操作, 且不需要附加的变压器,电源或外部滤波装置等。 《Electrical Review》,1998,(4)
步进电机与伺服控制器
世界最小的步进电动机
日本舍依科-依恩斯茨鲁公司和国外的光学设备厂家合作,开发出世界最小尺寸、高转矩的步进电动机SSM系列。 小型的步进电动机,因为能简易实现正确的驱动角,作为数字式照相机及手机用照相机的驱动源的需要正在不断扩大。但是对于小型机器,用更小尺寸的电动机实现需要的转矩较困难。 采用磁路的优化设计与小型机械零件的设计技术,在保证电动机构造最佳同时,采用独自的端子构造技术,不牺牲线圈体积,从而实现电动机小型化。 由此,体积为36 mm3 (直径4. 0 mm×长度2. 9 mm)、世界最小尺寸的SSM-4029产品制成,转矩0.033 mN·m。 与过去的同等转矩、长度更短的SSM-4049产品比较,转矩0.059 mN·m,可使便携电子机器小而薄。利用多年从事开发制造微型机械电子装置技术的经验,如微型齿轮、细轻丝杠等,制造出小型高精度电动机组件。 实现步矩角18°的步进电动机经齿轮、丝杠等可输出功率。此电机的具体用途为手机用照相机的透镜驱动、数字式照相机的快门、光圈驱动、新型光盘的拾音器驱动等,另外还可应用在小型机器的其它方面。
PLC控制步进电动机的一个实例

&"’) 发 出 电 动 机 运 行 运 行 信 号 " +"’! 控 制 步 进 电 动 机 旋 转 方 向 " 电 动 机 第 一 段 以 频 率 为 ("" 赫 兹 & 周 期 为 !#"" 微 秒 ! 开 始 启 动 " ,-. 每 发 一 个 脉 冲 周 期 减 少 %" 微 秒 " 共 发 %#" 个 脉 冲 " 电 动 机 行 走 %#" 步 " 频 率 则 上 升 到 %""" 赫 兹 $
& 周期不变 !
%""" 微 秒 " 每 个 脉 冲 周 期 增 加 # 微 秒 " 共 发 %"" 个脉冲 " 电动机停止 # 程序编制如下 % 控制系统启动 -/ &"’( 控制系统运行自保持 0 1"’" 控制系统停止 23 &"’# $) 万方数据
10:/ >%)"" " :/#%$ 共发出 %)"" 个脉冲 10:= >%"""" :=#%* 第三段起始周期为 %""" 微秒 &%""" 赫兹 ! 每个周期增加 # 微秒 10:= >#" :=#%@ 10:/ >%""" :/#!% 共发出 %"" 个脉冲 步进电动机运行到位 2 &"’*
(! 银行汇款 !
账户 ! 中国食品杂志社 开户行 ! 工行阜外大街分理处 账号 ! )*)))+,*),)*+,**--*
plc200-步进电机实例
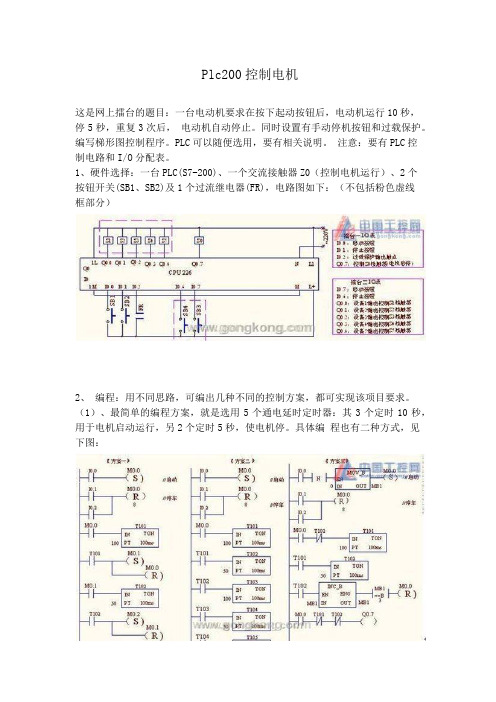
Plc200控制电机这是网上擂台的题目:一台电动机要求在按下起动按钮后,电动机运行10秒,停5秒,重复3次后,电动机自动停止。
同时设置有手动停机按钮和过载保护。
编写梯形图控制程序。
PLC可以随便选用,要有相关说明。
注意:要有PLC控制电路和I/O分配表。
1、硬件选择:一台PLC(S7-200)、一个交流接触器Z0(控制电机运行)、2个按钮开关(SB1、SB2)及1个过流继电器(FR),电路图如下:(不包括粉色虚线框部分)2、编程:用不同思路,可编出几种不同的控制方案,都可实现该项目要求。
(1)、最简单的编程方案,就是选用5个通电延时定时器:其3个定时10秒,用于电机启动运行,另2个定时5秒,使电机停。
具体编程也有二种方式,见下图:上图中的方案一与方案二,同用5个定时器,完成同样的功能。
方案一是这样编程:按下启动按钮(I0.0),使断开。
在此过程中,M0.0、MO.2、M0.4都是10秒的导通时间,用它们去控制Q0.7,其彼此间隔时间为5秒(即M0.1、M0.3的通导时间)。
?8?1延时?8?1M0.0=1,T101得电开始延时,延时10秒,T101吸合使M0.1=1、M0.0=0,使T101断电,而T102得电开始延时,5秒后T102得电吸合,使M0.2=1,M0.1=0。
直到T105得电方案二是这样编程:按下启动按钮(I0.0),使 M0.0=1,T101得电开始延时,延时10秒,T101吸合,使T102得电开始延时,延时5秒,T102吸合,使T103得电开始延时。
直至T105得电延时,延时10秒后动作,使M0.0=0,M0.0=0使T101—T105皆断开,程序结束。
用M0.0的常开触点与T101的常闭触点串联,用T102的常开触点与T103的常闭触点串联,用T104的常开触点与T105的常闭触点串联,三者再并联后去驱动Q0.7,可达到同样的控制作用,由上图可见,由于编程方法不同,其方案二用的指令比方案一少,显然:方案二优于方案一。
(整理)步进电机实例
步进电机控制例子我们使用的单极四相步进电机为例。
其结构如图1:四个绕组引出四相(相A1相A2相B1相B2)和两个公共线(接到电源的正极)。
把绕组的某一相接到电源的地线。
这样该绕组就会受到激励。
我们采用四相八拍的控制方式,即1相与2相交替导通,这样可提高分辨率。
每一步可转0.9°控制电机正转的励磁顺序如下表:若要求电机反转,将励磁信号倒过来传送即可。
2 控制方案控制系统的框图如下本方案采用AT89S51作为主控制器件。
它与AT89C51兼容,同时还增加了SPI接口和看门狗模块,这不但使程序调试变得方便而且也使程序运行更加稳定。
在方案中该单片机主要实现现场信号的采集并计算出步进电机运转的方向和速度信息。
然后传送给CPLD。
CPLD采用EPM7128SLC84-15,EPM7128是可编程的大规模逻辑器件,为ALTERA公司的MAX7000系列产品。
具有高阻抗、电可擦等特点,可用单元为2500个,工作电压为+5V。
CPLD接收到单片机发送过来的信息后,转换成对应的控制信号输出给步进电机驱动器。
驱动器则把控制信号处理后输入电机绕组,实现了电机的有效控制。
2.1 电机驱动器硬件结构电机的驱动器采用如下电路:其中R1-R8的电阻值为320Ω。
R9-R12的电阻值为2.2KΩ。
Q1-Q4为达林顿管D401A,Q5-Q8为S8550。
J1、J2与步进电机的六条引线相连编辑本段步进电机优缺点优点1.电机旋转的角度正比于脉冲数;2.电机停转的时候具有最大的转矩(当绕组激磁时);3.由于每步的精度在百分之三到百分之五,而且不会将一步的误差积累到下一步因而有较好的位置精度和运动的重复性;4.优秀的起停和反转响应;5.由于没有电刷,可靠性较高,因此电机的寿命仅仅取决于轴承的寿命;6.电机的响应仅由数字输入脉冲确定,因而可以采用开环控制,这使得电机的结构可以比较简单而且控制成本7.仅仅将负载直接连接到电机的转轴上也可以极低速的同步旋转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制要求:利用运动控制卡控制步进电机匀速转动,从而 控制滑块在竖直方向的运动,当按下停止按钮时,点击马 上停止转动(电机轴锁住)。
按下脱机按钮,电机轴松开。
控制竖直方向运动步进电机的选择
对于步进电机的选择我们主要考虑了两个方面,一是电机 的最大静力矩,要求能够拖动负载。
控制扫描仪按一定角度旋转的电机的计算与选择
同样用运动控制卡来控制步进电机,实现电机顺时针与逆 时针的旋转,用一个机械限位来限制扫描仪旋转的最大角 度。
控制要求:用运动控制卡控制电机的转动,当按下开始按 钮时,电机转动,转动到某一位置时,按下停止按钮,电 机停止转动(电机轴被锁住)。
连杆在水平时电机轴承受的力矩最大,测量得扫描仪重 2Kg,力臂最长为228mm,计算可得力矩最大为4.56Nm.
三维扫描系统工作流程图
先使扫描仪返回原点
在 电 磁 吸 盘 上 安 装 工 件(叶片)
调 整 扫 描仪位 置
先连动控制调整好扫 描仪在竖直方向大致 位置
先连动控制调整 好扫描仪的俯仰 角度
先连动控制调整好 叶片被扫描的第一 个截面
通过点动控制精 通过点动控制精 确定位竖直位置 确调整俯仰角度
通过点动控制精确 调整截面位置
控制扫描仪按一定角度旋转的电机的计算与选择
选择的步进电机型号为86HS2A101-504-01,该电机的最大 静力矩为6Nm,额定电流为5A,机身长度101mm,重量为 3.25Kg,经测试符合要求。
由 于 控 制 电 动 回 转 台 的 旋 转 的 精 度 要 求 不 高 , 经 测 试 86HS2A101-504-01型号步进电机可满足控制要求,故在此 不在过多赘述。
摆臂转动惯量的匹配
符号说明:J1:摆臂相对于转轴的转动惯量 J2 扫描仪相对于转轴的转动惯 量 JL 摆臂和扫描仪组合(负载)相对于转轴的转动惯量 JM 所选型号步进 电机转子转动惯量 ip 惯量匹配的最佳传动比
根据负载的转动惯量和步进电机的转动惯量,由最佳惯量匹配求得所需
要减速器的传动比
l
0.3
步进电机实用案例
步进电机在三维扫描系统中的应用
三维扫描系统工作原理概述
通过57HS2A76-304型号步进电机控制滚珠丝杠带动滑块 运动,实现扫描仪竖直方向的运动。
选择86HS2A101-504-01步进电机控制支撑杆旋转,实现 扫描仪在竖直平面按一定角度旋转。
选择 86HS2A101-504-01步进电机控制电动回转台的旋转, 实现圆形电磁盘的360度旋转,从而实现对待检测工件的 自动扫描。
64
根据最佳传动比可以求得步进电动机的额定转矩经减速器 后的最大输出转矩:
T额 8.7N • m,ip 64,T 34.33N • m T出 T额ip 8.764 556.8N • m T出 T
开始扫描
依次调整截 面位置扫描
扫描完成
后处理
8 7
1 2
3 4
5
6
9
4 10 1.步进电机 2.减速器 3.联轴器 4.轴承 5.滚珠丝杠 6.滑座 7.摆动臂 8.扫描仪 9.旋转工作台 10..底座
扫描仪结构原理简图
运动链
1.用步进电机1经过减速器2和联轴器3驱动滚珠丝杠5转动, 滚珠丝杠5经螺母带动滑座6上下移动,从而可以实现与滑 座连接的扫描仪上下移动。
J1 x2dx 10 x2dx 0.09kg • m2
0
0
J2 m2r22 10 0.32 0.9kg • m2
J L J1 J2 0.9 0.09 0.99kg • m2
J M 2.7 104 kg • m2 , 90%
ip
wM wL
JL
J M0.99 2.7 1 Nhomakorabea4 0.9
2.滑座6上的步进电机通过减速器和联轴器直接驱动摆臂7 绕轴摆动,从而实现扫描仪俯仰角的变化。
3.工作台9可以实现360°旋转.
任务
根据扫描仪的工作原理可以确定为了实现扫描仪正常共作 所需要进行的工作:
1.根据实现扫描仪上下移动所需要的最大转矩选择步进电 机的类型;
2.进行惯量匹配所需要的减速器类型; 3.驱动摆臂摆动所需要的步进电机的选型; 4.进行惯量匹配所需要的减速器的类型; 5.实现工作台转动所需需要步进电机的类型。
设置为5细分,电机每转一周可发出 360 5 =1000个脉冲。
1.8
控制竖直方向运动步进电机的选择
电机所需拖动的最大重量为100N,计算负载最大时的静力
矩为1 N • m 。
选择57HS2A76-304型号的步进电机,该步进电机最大静 力矩是1.8N • m ,额定电流为3A,机身长度76mm,转子惯量 为440,重量1.05Kg,符合要求。
二是选择电机的步距角,但是由于我们选择的是带细分功 能的驱动器,可以通过细分来改变步距角。
相关计算:利用公式 n
L • 360
p
(n为脉冲数,L为移动
距离,p为滚轴丝杆的螺距, 为步距角)计算脉冲数 n,我
们选择步距角为1.8度,经测量最大移动距离为1250mm,
选择的滚轴丝杠的螺距为5mm.代入计算可得n为50000.
摆臂的长度300mm
,质量大约为 3kg
,扫描仪
整体的质量大约为 10kg
,根据这些已知条件可以求得要
想实现扫描仪俯仰角改变所需要的最大驱动功率,由此可以实现对
步进电机的选型
r1 0.15m, r2 0.3m
m1 3 10kg / m
l 0.3
l
0.3
J1 x2dx 10 x2dx 0.09kg • m2
摆臂的工作状况
摆臂用来实现改变扫描仪的俯仰角,摆臂在空行程是实现
最大的摆速
,最短加速时间
,从而计算求
得最大加速度
,当摆臂在水平位置加速启动时,
所需要驱动力矩最大。
wL 6 rad / s
t 1s
R wL rad / s2
t 6
G2 G1
摆臂的结构
l 0.3m
m1 3kg
m2 10kg
0
0
T1
J1R
m1 gr1
0.09
6
3 9.8 0.15
4.46 N
•
m
T2
m2 Rr22
m2 gr2
10
6
0.32
10 9.8 0.3
29.87 N
•m
T T1 T2 4.46 29.87 34.33N • m
W T • w 34.33 17.98W
6
控制竖直方向运动步进电机的选择