电动汽车电机全参数确定
纯电动汽车电机选型匹配计算
2019年6月纯电动汽车电机选型匹配计算99纯电动汽车电机选型匹配计算金辉辉(格特拉克(江西)传动系统有限公司,江西南昌330000)摘要:根据整车厂提供的整车参数和性能指标,可以计算驱动电机的功率/扭矩/转速等性能指标,选配合适的动力电机。
可以缩短后期的整车试验验证时间,节省开发费用。
关键词:额定功率峰值功率额定扭矩峰值扭矩最高转速额定转速随着国家对纯电动汽车的鼓励支持政策,纯电动汽车在市场上的占有比例将会越来越高,同时国家对新能源汽车行业的要求提高了,在设计研发过程中对动力匹配要求也越来越高。
为了保证电动汽车在行驶中具有良好的动力性和经济性,就需要对电机进行合理的计算和匹配选型。
电动汽车驱动电机的匹配主要考虑功率、扭矩、转速等性能指标。
以下将对各性能指标进行计算分析。
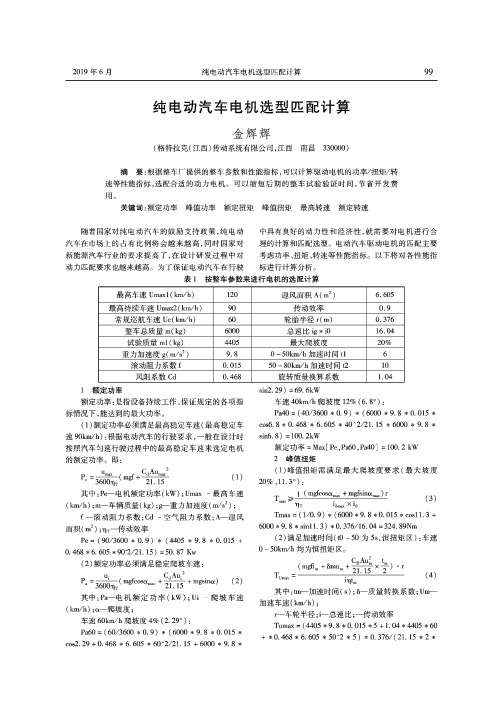
表1按整车参数来进行电机的选配计算最高车速Umaxl(km/h)120迎风面积A(m2) 6.605最高持续车速Umax2(km/h)90传动效率0.9常规巡航车速Uc(kin/h)60轮胎半径r(m)0.376整车总质量m(kg)6000总速比ig*i016.04试验质量ml(kg)4405最大爬坡度20%重力加速度g(m/s2)9.80-50km/h加速时间tl6滚动阻力系数f0.01550-80km/h加速时间t210风阻系数Cd0.468旋转质量换算系数 1.041额定功率额定功率:是指设备持续工作、保证规定的各项指标情况下,能达到的最大功率。
(1)额定功率必须满足最高稳定车速(最高稳定车速90km/h):根据电动汽车的行驶要求,一般在设计时按照汽车匀速行驶过程中的最高稳定车速来选定电机的额定功率。
即:”口叭*,”Au max/ ’、P«=36oo^(mgf+^nr⑴其中:Pe—电机额定功率(kW);Umax-最高车速(km/h);m一车辆质量(kg);g一重力加速度(m/s2);f—滚动阻力系数;Cd-空气阻力系数;A—迎风面积(mJ;%—传动效率Pe=(90/3600*0.9)*(4405*9.8*0.015+ 0.468*6.605*90*2/21.15)=50.87Kw(2)额定功率必须满足稳定爬坡车速:u C Au.2玖=36W^(mgfc°Sa-+*mgsina)(2)其中:Pa—电机额定功率(kW);Ui-爬坡车速(km/h);a—爬坡度;车速60km/h爬坡度4%(2.29°):Pa60=(60/3600*0.9)*(6000*9.8*0.015* cos2.29+0.468*6.605*6CT2/21.15+6000*9.8*sin2.29)=69.6kW车速40km/h爬坡度12%(6.8°):Pa40=(40/3600*0.9)*(6000*9.8*0.015* cos6.8+0.468*6.605*40八2/21.15+6000*9.8* sin6.8)=100.2kW额定功率二Max[Pe,Pa60,Pa40]=100.2kW2峰值扭矩(1)峰值扭矩需满足最大爬坡度要求(最大坡度20%,11.3。
电动汽车驱动电机参数匹配研究
电动汽车驱动电机参数匹配研究作者:严永利张国栋周运强刘文涛王峻亓新春张强刘振防来源:《中国科技博览》2018年第06期[摘要]随着纯电动汽车的大量应用,对电动车设计研发过程中的动力匹配设计要求也越来越高。
为保障电动汽车在行驶中具有良好的动力性和经济性,就要求对电动汽车的驱动电机进行合理的计算和匹配选型。
电动车驱动电动机的匹配主要考虑转速、功率、转矩、额定电压、绝缘等级、防护等级、工作制几个因素。
本文从实际出发,介绍了电动汽车驱动电机的匹配计算方法,为行业同仁在进行电动汽车驱动电机参数匹配时提供可行的思路。
[关键词]电动汽车,驱动电机,动力匹配中图分类号:U469.72 文献标识码:A 文章编号:1009-914X(2018)06-0089-011 驱动电机的转速电机的最高转速与电动汽车的最高车速之间的关系为:式中,nmax为电机最高转速,r/min;vmax为电动汽车的最高车速,Km/h;it为电动汽车传动系统的传动比;r为车轮半径,m。
电动汽车最高车速是指电动汽车能够往返各持续1Km以上距离的最高平均车速。
电机额定转速为;式中,ne为电机的额定转速;β为电机扩大恒功率区系数。
β值越大,在低转速区电机就可获得越大的转矩,有利于提高车辆的加速能力和爬坡性能,稳定运行性能好;但β值太大,会增大电机的工作电流,同时功率变换器件的功率损失和尺寸也会增大,因此β值不宜过高。
Β通常取值为2-4。
2 驱动电机的功率驱动电机是纯电动汽车行驶的唯一动力源,对整车的动力性有直接的影响。
电机功率的选择需要充分平衡动力性和经济性。
2.1 驱动电机的额定功率正确选择驱动电机的额定功率很关键,如果选择功率过小,则电机会经常在过载状态下运行;相反,如果选择功率太大,则电机会经常工作在欠载状态,效率及功率因数降低,不仅浪费电能,而且为了达到预期的续航里程还要增加动力电池的容量,综合经济效益下降。
电机的额定功率应使电机尽可能工作在高效率区。
驱动电机参数确定
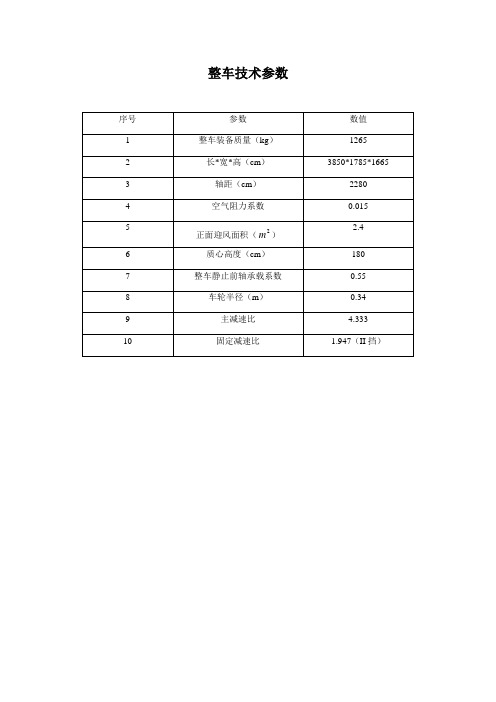
电动汽车技术一、驱动电机参数确定(1)最高车速时计算驱动电机功率电机的功率必须能满足电动轿车最高车速的要求,以保证在良好的路面或空载情况下,能以较高的车速行驶.最大车速时所需功率:2D a 1cos 21.153600a M axV V C A P Gf V ⎛⎫=++ ⎪⎝⎭η=24.7(KW )m=2600kg ;V a=90 km/h ;f=0.016; C D =0.5;η=0.95;B=1.46m ;H=1.87m;(2)加速性能计算驱动电机功率。
保证在良好的路面或空载情况下,整车加速过程的末时刻为电动汽车输出最大功率,加速过程所需最大功率:= 25.6(kw )(3)最大爬坡度时计算驱动电机功率在计算最大爬坡度时的电机功率时,应忽略加速阻力功率 爬坡过程所需最大功率:=32.84(kw) 根据以上各式计算得出发动机在不同工况下的扭矩和驱动力: P=Tn/n=(Va ×i 0)/(0.337×r) (2)联立上面两个方程可得M axV T =70Nm, Ft=890N23D 13600 1.521.152.5a a MaxJ a a a t u u C Au P mgf t t t ⎛⎫=+ ⎪ ⎪⨯⎝⎭δη136003600a a MaxGra t mgfu mgiu P ⎛⎫=+ ⎪⎝⎭ηT=408Nm, Ft=5.9kNM axJT=650Nm, Ft=8.1kNM axG ra由此可得根据(1)计算可知选定电机的额定功率为30kw,由(2)(3)可知选定电机的峰值功率为60kw,最大扭矩为650Nm 二、电池组电压、容量的确定在选择了电机类型以后,就要确定电池的参数。
在一定的电机功率下,电压越高,电流就越低,线路功率损失就越小,在电池以小电流放电时,可发挥出较大的容盈。
根据0.15kWh/km×150km=22.5kWh即所需电池的容量为22.5kWh,考虑到其它电气设备,选择电池容量为25kwh。
电动汽车驱动电机的设计与选型

电动汽车驱动电机的设计与选型全世界的汽车保有量和使用量的逐日增大,世界能源问题越来越突出,电动汽车方向逐渐出现并在汽车领域占有了一个非常重要的位置。
早在20世纪50年代初,美国人罗伯特就发明了一种将电动机、传动系统和制动系统融为一体的轮毂装置。
该轮毂于1968年被通用电气公司应用在大型的矿用自卸车上。
相对与传动汽车、单电机集中驱动的汽车,轮毂电机式电动汽车具有以下优点:动力控制通过电子线控技术实现对各电动轮进行无级变速控制,以及各电动轮之间的差速要求,省略了传统汽车所需的波箱、离合器、变速器、传动轴等;在电机所安装的位置同时可见,整车的结构变得简洁、紧凑,车身高降低,可利用空间大,传动效率高。
容易实现各电动轮的电气制动、机电复合制动和制动能量回馈。
底盘结构大为简化,使整车总布置和车身造型设计的自由度增加。
若能将底盘承载功能与车身功能分离,则可实现相同底盘不同车身造型的产品多样化和系列化,从而缩短新车型的开发周期,降低开发成本。
若在采用轮毂电机驱动系统的四轮电动汽车上导入线控四轮转向技术(4WS),实现车辆转向行驶高性能化,可有效减小转向半径,甚至实现零转向半径,大大增加了转向灵便性。
(说起来很轻松,但是如果真正实现起来,上面那段话恐怕十年之内都没办法产业化,比如机电复合制动,比如制动能量回馈,原理不难,难的是在技术、成本、产业、供应商等等条件都成熟起来之后......)1.电动汽车基本参数参数确定1.1 该电动汽车基本参数要求,如下表:1.2 动力性指标如下:最大车速X;在车速=60km/h时爬坡度5%(3度);在车速=40km/h时爬坡度12% (6.8度);原地起步至100km/h的加速时间;最大爬坡度(16度);0到75km/h加速时间;具备2~3倍过载能力。
2.电机参数设计一般来说,电动汽车整车动力性能指标中最高车速对应的是持续工作区,即电动机的额定功率;而最大爬坡度和全力加速时间对应的是短时工作区(1~5min),即电动机的峰值功率。
纯电动汽车动力系统参数匹配及性能分析
• 差速半轴方案和传统汽车的传动方式较为类似。不过由于某些 电动汽车可以做的比较轻巧,以及电机的外特性特征,某些电 动汽车可以取消多挡变速装置。
• 电动轮方案相对于传统汽车来说,是革命性的。电机直接和车 轮耦合,或者通过轮边减速器和车轮耦合。取消了机械差速装 置,而采取电子差速。其可以给电动汽车的动力性、通过性等 表现带来巨大的改变。
传动系匹配思路
获得动力性要 求和部分数据
选择传动系方案
研究思路
计算动力系统参 数,选配电机
制作实车
合格
仿真,并进行 结果分析
不 合 格
建立仿真模型 优化匹配参数
名称 加速性要求 爬坡性要求 最高时速
What do we have?
要求 45km/h加速时间小于10s
20%的爬坡度 不小于50km/h
电机参数计算与电机选配
Pe 1 (G f ua G i ua )
3600 3600
根据最大速度计算最大功率
Ttq
(m
g
sin m g ig i 0
cos )
r
根据最大爬坡度计算最大转矩
T 9554 P n
根据额定功率计算额定转矩
t u ( dt ) du u M du
研究的意义
• 面对人类社会对于汽车的依赖,以及越来越严重的资源和环境 压力,新能源汽车无疑是解决这一矛盾的利器。而电动汽车以 其零排放、零污染、低噪声的特点,将新能源汽车的优势发挥 到了极致。发展电动汽车必然能够为我国汽车工业的崛起起到 深远的影响。
• 笔者认为电动汽车的发展是汽车工业必然需求。对于电动汽车 的研发,计算机的应用必然要起到更重要的作用。计算机仿真 技术是计算机技术在汽车设计领域的重要应用,以及更加广泛 的影响。
纯电动汽车电动机选配
整车技术参数取值:最高车速 80km/h 爬坡车速 5km/h 最大爬坡度 30° 加速时间 10s 传动系效率 0.9 滚动阻力系数 0.02 电机过载系数 4.5 电机扩大恒功率区系数 2一、电机峰值功率及额定功率的匹配电机的功率大小直接关系到电动汽车的动力性的好坏。
电机功率越大,电动汽车的加速性能和最大爬坡度越好,但电机的体积和质量也会相应地增加,同时电机不能经常保持在高效率下工作,降低了电动汽车的能量利用率,降低了汽车的行驶里程。
驱动电机的最大功率(P max e )必须满足最高车速时的功率(P e )、最大爬坡度时的功率(P a )及根据加速时间的功率(P c )要求,即:P maxe ],,max[c a e P P P ≥。
其中,⎪⎪⎭⎫⎝⎛+=15.2136002max max Au C mgf u P D Te η ⎪⎪⎭⎫ ⎝⎛++=15.21sin cos 36002max max i D T ia Au C mg mgf u P ααη ⎪⎪⎭⎫ ⎝⎛⨯++=a aD a a a a Ta c t Au C t u mgf t u m t P 5.215.215.123600132δη 式中:max u ——最高车速,km/h ; T η——传动系机械效率; m ——电动汽车整备质量,kg ; f ——滚动阻力系数; D C ——空气阻力系数; A ——迎风面积,m 2;max α——最大爬坡度,(︒); i u ——爬坡车速,km/h ;a u ——汽车的加速末速度,km/h ; a t ——汽车加速时间,s 。
kw P 52.6=εkw P a 1.10=kwP c 2.4=电机的峰值功率与额定功率的关系为:额峰P Pλ=式中:峰P ——电机峰值功率,kw ; 额P ——电机额定功率,kw ; λ——电机过载系数。
根据max e P 选择驱动电机的峰值功率,这里选择=额P10kw ,=峰P 45kw 。
纯电动汽车动力系统参数选择与匹配
(m r ),同时在 高转 速 时得 到恒 定 的较 高 功率 ( W )。
恒 转 矩 区
\ 恒 率 ’ 功 区
W b
现 / 率
/
*
由电机最 高转 速和 最 高行驶 车速确 定 的 i : 为 i
f :—
的
0
( m r
+
—
Fw
—
) r
c √ ≤ 1 . 8
- —
』 s d7 M . 7 x
图 2 电动汽车功率平衡图
式 中:
N・ 。 m
厂 —一 高车速 下 电动 汽车 的空气 阻力 ,N; 一 最
。 — —
1 电机 最 高 转 速 和 基 频 能 满 足 n an ) m / ≥ 25 x ., 电机 从基 频 向上 调速 的范 围足够 大 ,此 时选择 1 个挡 位 即可 ,其 功 率 平衡 图 ,如 图 2 所 示 。在 设计 计 算 a
大 功率 ( 。 )必须 满足 最 高车 速 时 的功 率 ( 。 P P )、 最 大爬 坡度 时 的功率 ( a及 根 据加 速 时 问的功 率 ( c 尸) 尸)
要 求 , 即 :P ≥ ma [e a c。 。 xP , , ] PP
H
和 逆变 器 的功率 损 耗和 尺 寸增 大 L,因此 值 一般取 3 J
Cl l
式 中: P峰 —— 电机 峰 值功 率 ,k ; w P锎 —— 电机 额 定功 率 ,k ; W
— —
式 中: — — 电动车 续驶 里程 ,k m;
一
电机 过载 系数 。
电动汽车动力匹配计算规范(纯电动)
电动汽车动力匹配计算规范(纯电动)XH-JS-04-013电动汽车动力匹配计算设计规范编制:年月日审核:年月日批准:年月日XXXX有限公司发布目录一、................................ 概述1二、............................... 输入参数12.1 基本参数列表 (1)2.2 参数取值说明 (1)三、................ XXXX动力性能匹配计算基本方法23.1 驱动力、行驶阻力及其平衡 (3)3.2 动力因数 (6)3.3 爬坡度曲线 (6)3.4 加速度曲线及加速时间 (7)3.5 驱动电机功率的确定 (7)3.6 主驱动电机选型 (8)3.7 主减速器比的选择 (8)参考文献 (9)一、概述汽车作为一种运输工具,运输效率的高低在很大程度上取决于汽车的动力性。
动力性是各种性能中最基本、最重要的性能之一。
动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。
因此在新车开发阶段,必须进行动力性匹配计算,以判断设计方案是否满足设计目标和使用要求。
二、输入参数2.1 基本参数列表进行动力匹配计算需首先按确定整车和发动机基本参数,详细精确的基本参数是保证计算结果精度的基础。
下表是XXXX动力匹配计算必须的基本参数,其中发动机参数将在后文专题描述。
表1动力匹配计算输入参数表。
2.2 参数取值说明1)迎风面积迎风面积定义为车辆行驶方向的投影面积,可以通过三维数模的测量得到,三维数据不健全则通过设计总布置图测得。
XXXX 车型迎风面积为A 一般取值5-8 m 2 。
2)动力传动系统机械效率根据XXXX 车型动力传动系统的具体结构,传动系统的机械效率T η主要由主驱动电机传动效率、传动轴万向节传动效率、主减速器传动效率等部分串联组成。
采用有级机械变速器传动系的车型传动系统效率一般在82%到85%之间,计算中可根据实际齿轮副数量和万向节夹角与数量对总传动效率进行修正,通常取传动系统效率T η值为78-82%。
国内电动汽车轮毂电机的技术指标参数
国内电动汽车轮毂电机的技术指标参数在当今汽车行业的快速发展和环保意识的不断提升下,电动汽车作为一种清洁、高效的交通工具,受到了越来越多消费者的青睐。
而在电动汽车的关键部件中,轮毂电机更是其核心之一。
轮毂电机作为电动汽车的动力来源,其技术指标参数的优劣直接影响着车辆的性能表现和行驶效率。
本文将从深度和广度的角度探讨国内电动汽车轮毂电机的技术指标参数,以帮助读者更全面、深入地了解这一重要的部件。
一、功率密度国内电动汽车轮毂电机的技术指标中,功率密度是一个极为重要的参数。
功率密度代表着单位体积或单位重量下的功率输出,也可以理解为电动汽车轮毂电机的动力性能。
一般来说,功率密度越高的轮毂电机,意味着其在同样体积或重量下能够输出更大的功率,从而提高车辆的加速性能和行驶效率。
国内一些知名的电动汽车制造商,如特斯拉、蔚来等,他们的轮毂电机功率密度已经达到了非常可观的水平。
其采用了先进的磁动力电机技术和高性能材料,使得轮毂电机的功率密度得到了显著提升。
而随着电动汽车技术的不断进步,相信未来国内电动汽车轮毂电机的功率密度会有更大突破,为用户带来更优秀的驾驶体验。
二、效率电动汽车作为一种节能环保的交通工具,其能源利用效率也是一个非常重要的指标。
而轮毂电机的效率即代表了其能够将电能转换为机械能的能力。
一般来说,电动汽车轮毂电机的效率越高,意味着在同样的电能输入下,能够输出更大的动力,从而延长电动汽车的续航里程,提高能源利用效率。
国内一些领先的电动汽车轮毂电机制造商,他们在提升电机效率方面也做出了一系列的努力。
采用了高效的电机设计、优质的材料和先进的生产工艺,使得电动汽车轮毂电机的效率得到了显著提升。
一些新型的永磁同步电机等技术的应用,也为电动汽车轮毂电机的效率带来了全新的突破。
未来,随着电动汽车技术的不断发展,相信国内的电动汽车轮毂电机在效率方面也会有更大的提升空间。
三、扭矩除了功率密度和效率外,电动汽车轮毂电机的扭矩也是一个重要的技术指标参数。
如何合理确定微型纯电动车动力系统设计参数?
如何合理确定微型纯电动车动力系统设计参数?卢兰光 1,欧阳明高11汽车安全与节能国家重点实验室,清华大学,北京 100084E-mail: Lulg@[摘要]目前由于没有电动车性能设计标准,市场上的电动车性能(最高车速、续持里程)各有不同。
由于目前的动力电池性能(比能量、比功率、耐久性及成本)还不是很理想,如何确定纯电动车动力系统的设计指标才能满足出行需要,同时又兼顾成本、可靠性和耐久性?本文以奇瑞公司生产的微车QQ3(汽油机版)为原型,进行微型纯电动车的性能匹配(包括驱动电机、电池容量选型等等)与仿真研究。
在研究过程中考虑了以下因素的影响:(1)行驶路况;(2)驱动电机最高效率区;(3)整车最大的载重能力;(4)日出行里程;(5)居民家庭的配电容量;(6)电池耐久性;(7)电池的初始投资成本等等。
关键词:微型纯电动车;设计指标;续持里程;最高车速How to determine the electric car design specifications?Languang Lu 1, Minggao Ouyang 11State Key Laboratory of Automotive Safety and Energy, Tsinghua University, Beijing 100084, PR ChinaE-mail: Lulg@Abstract— Currently, as there are no formal standard for EV specification designing, the range and the maximum speed of many electric cars are different. As the performances (specific energy, specific power, durability and cost) of current batteries are not perfect, how to determine the EV design specifications so that it can take cost, availability, reliability and durability into account? In this paper, based on the internal combustion engine micro-car QQ3, a micro-EV was matched (included selecting the traction motor and the capacity of the battery) and simulated, while the following factors are taken into account: (1) Driving cycles; (2) The high efficiency zone of the traction motor; (3) Vehicle carry weight capacity; (4) Daily mileage; (5) Charge capacity of the family house; (6) The durability of battery; (7) Battery initial investment.Keywords—Micro Electric car, Design specifications, Range, Maximum speed目前,由于没有电动车性能设计标准作为参考,许多电动车的设计续持里程和最大车速都相差较大,例如日本Eliica电动车的设计最大续持里程和最高车速分别为320km和400km/h;比亚迪的E6电动车设计续持里程和最高车速分别为300km和160km/h;而SMART for-two 电动车设计里程与最高车速只有115km和100km/h。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动汽车技术
一、驱动电机参数确定
(1)最高车速时计算驱动电机功率
电机的功率必须能满足电动轿车最高车速的要求,以保证在良好的路面或空载情况下,能以较高的车速行驶.
最大车速时所需功率:
2D a 1cos 21.153600a MaxV V C A P Gf V ⎛⎫=++ ⎪⎝⎭η=24.7(KW )
m=2600kg ;Va=90 km/h ;f=0.016; C D =0.5;η=0.95;B=1.46m ;H=1.87m;
(2)加速性能计算驱动电机功率。
保证在良好的路面或空载情况下,整车加速过程的末时刻为电动
汽车输出最大功率,加速过程所需最大功率:
= 25.6(kw )
(3)最大爬坡度时计算驱动电机功率
在计算最大爬坡度时的电机功率时,应忽略加速阻力功率
爬坡过程所需最大功率:
=32.84(kw) 根据以上各式计算得出发动机在不同工况下的扭矩和驱动力: P=Tn/9549 (1)
n=(Va ×i 0)/(0.337×r) (2)
联立上面两个方程可得
MaxV T =70Nm, Ft=890N
MaxJ T =408Nm, Ft=5.9kN
MaxGra T =650Nm, Ft=8.1kN
由此可得根据(1)计算可知选定电机的额定功率为30kw ,
由(2)(3)可知选定电机的峰值功率为60kw,最大扭矩为650Nm
二、电池组电压、容量的确定
在选择了电机类型以后,就要确定电池的参数。
在一定的电机功率136003600a a MaxGra t mgfu mgiu P ⎛⎫=+ ⎪⎝⎭η
下,电压越高,电流就越低,线路功率损失就越小,在电池以小电流放电时,可发挥出较大的容盈。
根据0.15kWh/km×150km=22.5kWh即所需电池的容量为22.5kWh,考虑到其它电气设备,选择电池容量为25kwh。
锂电单体的容量为270Wh,铅酸电池单体的容量为1.44kWh;若选锂电池则需要92个单体,若选铅酸电池则需要18个单体三、采用Matlab计算绘制驱动力和行驶阻力图
clear;clf;
axis([0, 250, 0, 12000]);
ig=1;
i0=4.1;
r=0.325;
G=26000;
f=0.016;
Cd=0.5;
A=2.73;
Pmax=60;
Torque=650;
v=0:26.35;
Fw =(f*G+Cd*A*(v.^2))./21.15;
F=v*0+(Torque*ig*i0)./r;
hold on
plot(v,Fw,v,F);
v=26.35:250
F=(9549*Pmax*0.377)./v;
Fw =(f*G+Cd*A*(v.^2))./21.15; plot(v,Fw,v,F);
xlabel('速度km/h');
ylabel('驱动力N ');
title('驱动力-行驶阻力图');
参考文献:
【1】纯电动汽车动力传动系统的匹配与仿真,景柱等,汽车工程学报,3013,3(1),54-58;【2】插电式并联混合动力汽车动力传动系统与控制参数匹配设计,舒红等,汽车工程学报,2013,2(2),105-112;
【3】电动轿车及动力电池的应用分析,张海波,汽车工业研究,2013,3,24-28;。