南京航空航天大学机电学院复试真题全集2
南京航空航天大学夏令营面试题
南京航空航天大学夏令营面试题
1.一个探险家被土人抓住,土人首领说:“如果你说真话,你将被烧死,说假话,将被五马分尸。
”请问探险家该如何保命?
2.有8个外观完全一样的玻璃球,已知其中一个质量较轻,现用天平最多称两次,怎么找到质量最轻的玻璃球?
3.一道题目就是使学生写下一个偏旁一样的四字词语,同学们纷纷写下“波涛汹涌”“江河湖海”“魑魅魍魉”。
4.谈谈“对中庸和平庸的认识”。
5.存有一道题是得出4组与词语,分别从百度和谷歌、辛弃疾和柳永、乔布斯和袁隆平、林黛玉和薛宝钗中挑选出两组你最喜欢的,并表述理由。
6.一个人有10万根头发,这不能算秃头。
掉了一根头发,仍然不是秃头。
按照这个道理,让一个不是秃头的人一根一根地减少头发,就得出一条结论:没有一根头发的光头也不是秃头!为什么会产生这个悖论?
7.你对老年人身心健康医疗体系的完善怎么考量,存有什么建议?
8.请谈谈你对生物医学的理解,以及什么叫基因工程、蛋白质是由什么构成的?
9.生活中存有哪些领域可以应用领域至机电科学知识?(答案可以参照雾霾天可以太少驾车增加尾气排放量,或者用电Courtomer替代石油等能源,增加污染)。
南航考研机械设计复试试题
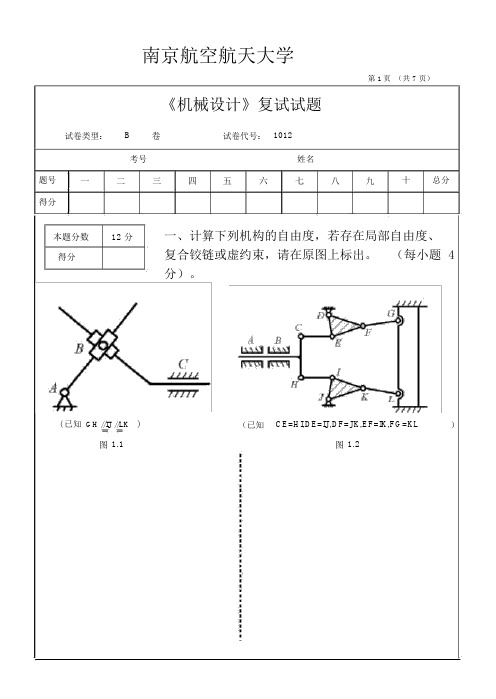
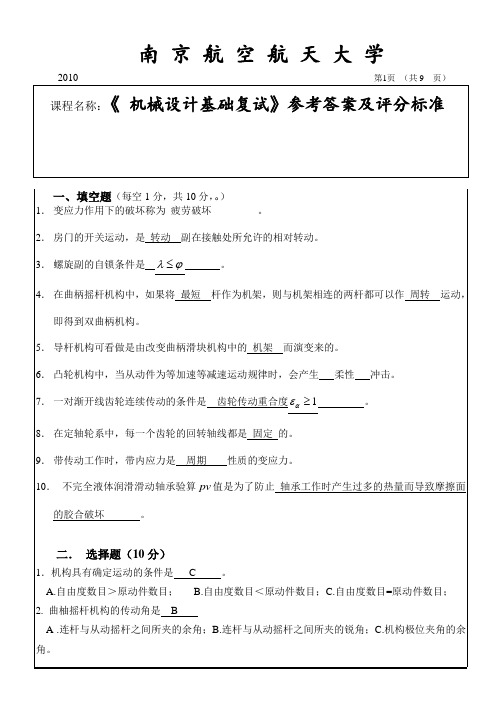
南京航空航天大学第1页(共 7 页)《机械设计》复试试题试卷类型:B卷试卷代号:1012考号姓名题号一二三四五六七八九十总分得分本题分数12 分一、计算下列机构的自由度,若存在局部自由度、得分复合铰链或虚约束,请在原图上标出。
(每小题 4分)。
( 已知GH //IJ //LK)(已知CE=HI,DE=IJ,DF=JK,EF=IK,FG=KL)图1.1图1.2图 1.3本题分数12 分二、一曲柄摇杆机构,已知摇杆DC 在两个极限位得分杆 BC 的长度置时与机架的夹角分别为φ1=135°,φ2=60°。
摇杆DC 的长度L DC=50mm ,机架AD 的长度L AD=70mm 。
试: 1)求出曲柄 AB 的长度 L AB、连L BC;2)求行程速比系数K;3)计算机构的最小传动角(可用作图法,取比例尺μ1=1mm mm)。
.本题分数14 分三、已知一对外啮合正常齿制标准直齿圆柱齿轮的标准中心距 a = 360 mm,齿数 Z 1, 2,求:得分=40Z =1401)齿轮 1 的分度圆直径、齿顶圆直径、基圆直径、齿距和齿厚; 2)在齿轮 1 的分度圆、基圆、齿顶圆上渐开线齿廓的曲率半径ρ ,ρ、αa。
b ,ρa和压力角α、αb本题分数12 分四、如图所示传动系统, 1、5 为蜗杆, 2、6 为蜗得分轮,3、4 为斜圆柱齿轮, 7、8 为直齿锥齿轮。
已.知蜗杆 1 为主动件,要求输出齿轮 8 的回转方向如图所示,且轴I 、II 、III 上所受的轴向力能抵消一部分。
试确定: ( 1)各轴的回转方向;(2)各轮齿的螺旋线方向;(3)各轮的轴向力方向。
82 3IV7I6II154III本题分数10 分五、在图示轮系中,设已知各轮齿数为: , z 1=30,, z =90,z,, z =40 z =30 ,得分z =30=30 z =20 2 3 41’3’4’z 5=15,试求轴 I 轴 II 之间的传动比 i I II 。
南京航空航天大学(电工电子)考试题库说课讲解
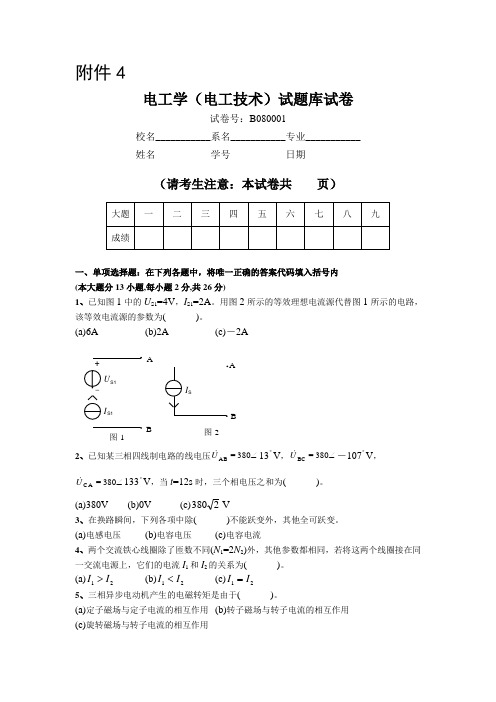
附件4电工学(电工技术)试题库试卷试卷号:B080001校名___________系名___________专业___________ 姓名___________学号___________日期___________(请考生注意:本试卷共 页)一、单项选择题:在下列各题中,将唯一正确的答案代码填入括号内 (本大题分13小题,每小题2分,共26分)1、已知图1中的U S1=4V ,I S1=2A 。
用图2所示的等效理想电流源代替图1所示的电路,该等效电流源的参数为( )。
(a)6A(b)2A(c)-2AU 图 1图 22、已知某三相四线制电路的线电压∠380=B A U 13︒V ,∠380=C B U -107︒V ,∠380=A C U 133︒V ,当t =12s 时,三个相电压之和为( )。
(a)380V(b)0V(c)380 2 V3、在换路瞬间,下列各项中除( )不能跃变外,其他全可跃变。
(a)电感电压 (b)电容电压 (c)电容电流4、两个交流铁心线圈除了匝数不同(N 1=2N 2)外,其他参数都相同,若将这两个线圈接在同一交流电源上,它们的电流I 1和I 2的关系为( )。
(a)I I 12> (b)I I 12< (c)I I 12=5、三相异步电动机产生的电磁转矩是由于( )。
(a)定子磁场与定子电流的相互作用 (b)转子磁场与转子电流的相互作用 (c)旋转磁场与转子电流的相互作用6、在电动机的继电器接触器控制电路中,热继电器的功能是实现( )。
(a)短路保护 (b)零压保护 (c)过载保护7、准确度为1.0级、量程为250V 的电压表,它的最大基本误差为( )。
(a)±25.V (b)±025.V (c)±25V 8、在图示的380/220V 供电系统中,电机M 错误地采用了保护接地,已知两接地电阻R 1和R 2相等,导线和地的电阻可忽略不计。
南航考研机械设计基础复试试题
A.重载B.高速
C.工作温度高D.承受变载荷或振动冲击载荷
9.根据轴的承载情况,A的轴称为转轴。
A.既承受弯矩又承受转矩B.只承受弯矩不承受转矩
C.不承受弯矩只承受转矩D.承受较大轴向载荷
10.在蜗杆传动中,当其他条件相同时,增加蜗杆直径系数q,将使传动效率C。
A.提高B.减小
C.不变D.增大也可能减小
三、简答题(共5小题,共20分)
1.计算所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),图中画有箭头的构件为原动件。
F=6X3-2X8-1=1
2.简述齿轮产生根切的原因及防止措施。
齿轮产生根切的原因是由于范成加工时刀具的齿顶圆超过轮坯的啮合极限点,把渐开线轮廓切掉一部分。防止措施:增大齿数;采取正变位。
每处1分
1应加调整垫片;②轴端太长,应减少长度,加倒角。③轴肩不能高于轴承内圈。
4键长应短于轮毂长度⑤缩短装齿轮的轴段长度⑥轴承处应改为阶梯轴。
7轴承盖与轴接触了
8应改为阶梯轴定位联轴器
9键的方位应与齿轮的键一致
10联轴器轴端要固定
(1)蜗杆1的转动方向;
(2)一对斜齿轮3、4轮齿的旋向;
(3)用图表示轴Ⅱ上传动件2和3的受力情况(圆周力Ft、径向力Fr和轴向力Fa)(垂直纸面的力,向纸内画,向纸外画⊙)
。
解:(1)蜗杆1的转动方向为顺时针。
(2)斜齿轮3为右旋,斜齿轮4为左旋。
(3)传动件2有传动件3有
4.(本题满分9分)轮系计算,在图示轮系中,已知Z1=18,Z2=90,Z3=36,Z4=33,Z5=87,求传动比i15。
(1)两个轴承的轴向载荷Fa1、Fa2;
2021南航机电学院机械工程面试题目
2021南航机电学院机械工程面试题目2021南航机电学院机械工程复试题目(来自考研论坛):我的问题是:1、数控加工退刀槽作用2.、液压与气压传动优缺点3、液压中控制阀列举4.节气门调速、容积调速原理5、c语言中全局变量与局部变量区别6、plc什么分析方法(如:时序图)7、梯形图与逻辑控制图区别8、列举生活中传感器运用及原理然后他问我比舍和我的一些证书。
其他研友:9.装配图上需要标注的内容10。
机械传动类型11、如何使用游标卡尺测量一个很小的孔的直径12、刀具的前角后角等13、切削的几种加工方法14.机械制造方法是什么?15.有哪些特殊处理方法?16.电梯是如何设计的17、大齿轮和小齿轮哪一个硬18.如何在线性和曲线运动之间转换19。
机械原理的机理20、数控g,m意思,调速的代码21、钻孔达到七级精度用什么办法22.如果零件上有许多孔,如果它们非常复杂,如何处理它们23。
有限元分析,CAE 是什么意思24、用有限元分析软件时步骤,分析的具体流程25.实习期间您参观过哪些工厂,简要描述布局并评估不足之处。
26、有一份报道:“一物体比重70mg/cm三次方,其重量是5kg,作用于其上的力为60kgf,......”。
请问这份报道有什么问题27、电火花加工和电火花线切割的区别28、什么是硬切削29.为什么蜗杆和蜗杆不能反向驱动。
30、欧母定律31、表面质量32、加工精度33.正变位齿廓的变化34、荷叶出淤泥而不染35、屋顶的大梁怎么放36.蜗杆和蜗杆传动可以获得较大的传动比,但不可能实现反向传动。
为什么?37.简要描述“数控”的定义和应用。
38、复合材料举例,作用,优点39、c语言指针作用40.如何消除加工硬化,四火的使用和应用41。
液压传动装置的组成、比例调速的概念和功能42。
数控机床的对刀43、说说车床夹具和铣床夹具的区别?44.、电磁炮是什么原理?45.用锯子锯钢怎么了?解释46.直流电机的调速方式?47.组装方法是什么?48.、机械振动的分类有哪几种?比如说受迫振动。
南京航空航天大学(电工电子)考试题库

电工学(电工技术)试题库试卷试卷号:B080001校名系名专业姓名学号日期(请考生注意:本试卷共页)大题-一一-二二三四五六七八九成绩一、单项选择题:在下列各题中,将唯一正确的答案代码填入括号内(本大题分13小题,每小题2分,共26分)1、已知图1中的1=4V, 1=2A。
用图2所示的等效理想电流源代替图1所示的电路,该等效电流源的参数为()。
(a)6A (b)2A (c)- 2A107 V U CA =380 133V,当12s时,三个相电压之和为()附件42、已知某三相四线制电路的线电压U AB = 380 13 V, U BC = 380 —(a)380V (b)OV (c) 38O 2 V3、在换路瞬间,下列各项中除()不能跃变外,其他全可跃变。
(a)电感电压(b)电容电压(c)电容电流4、两个交流铁心线圈除了匝数不同(Nl=2N2)外,其他参数都相同,若将这两个线圈接在同一交流电源上,它们的电流11和I2 的关系为()。
⑻I l 12 (b) I l ::I2 (c)丨 1 “25、三相异步电动机产生的电磁转矩是由于()。
(a)定子磁场与定子电流的相互作用(b)转子磁场与转子电流的相互作用(c)旋转磁场与转子电流的相互作用6、在电动机的继电器接触器控制电路中,热继电器的功能是实现()。
(a)短路保护(b)零压保护(c)过载保护7、准确度为1.0级、量程为250V的电压表,它的最大基本误差为()。
(a) -25 V (b) -025 V (c) -25V&在图示的380/220V供电系统中,电机M错误地采用了保护接地,已知两接地电阻R1和R2相等,导线和地的电阻可忽略不计。
当电机M的C相碰金属外壳时,中线对地电压为()。
(a)0V (b)110V (c)不定值9、图示正弦电路中,R = X L =10「, U AB -U BC ,且U 与I 同相,则复 阻抗Z 为()。
(a) (5 j5)「(b) (5-j5)「(c) 10 45 门10、图示电路中,1 ,则电压表的读数为() (a)0 (b)1(c)2电路在=10时等效,则图1中R 及图2中R 分别为()(a )R=10「 R J 12.5" (b )R=125」 R -10' 1(c) R=10「 R 』0.T 」12、在R, L 并联的正弦交流电路中,40 , 30 ,电路的无功 功率1 jX cjX L11、已知图1中0.5H , 图2中L ,12.5H ,若要使图1电路与图2 ABLA B C NJX C L480,则视在功率S为()。
(NEW)南京航空航天大学机电学院851机械原理历年考研真题汇编

目 录
2012年南京航空航天大学923机械原理(专业学位)考研真题 2013年南京航空航天大学923机械原理(专业学位)考研真题 2014年南京航空航天大学923机械原理(专业学位)考研真题 2015年南京航空航天大学923机械原理(专业学位)考研真题 2018年南京航空航天大学851机械原理考研真题
2012年南京航空航天大学923机械 原理(专业学位)考研真题
2013年南京航空航天大学923机械 原理(专业学位)考研真题
2014年南京航空航天大学923机械 原理(专业学位)考研真题
2015年南京航空航天大学923机械 原理(专业学位)考研真题
2018年南京航空航天大学851机械 原
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机期末考试试题01、单片机是将微处理器、一定容量的RAM 和ROM以及I/O 口、定时器等电路集成在一块芯片上而构成的微型计算机。
2、单片机89C51片内集成了 4 KB的FLASH ROM,共有 5 个中断源。
3、两位十六进制数最多可以表示256 个存储单元。
4、89C51是以下哪个公司的产品?( C )A、INTELB、AMDC、ATMELD、PHILIPS5、在89C51中,只有当EA引脚接高电平时,CPU才访问片内的Flash ROM。
6、是非题:当89C51的EA引脚接低电平时,CPU只能访问片外ROM,而不管片内是否有程序存储器。
T7、是非题:当89C51的EA引脚接高电平时,CPU只能访问片内的4KB空间。
F8、当CPU访问片外的存储器时,其低八位地址由P0 口提供,高八位地址由P2 口提供,8位数据由P0 口提供。
9、在I/O口中,P0 口在接LED时,必须提供上拉电阻,P3 口具有第二功能。
10、是非题:MCS-51系列单片机直接读端口和读端口锁存器的结果永远是相同的。
F11、是非题:是读端口还是读锁存器是用指令来区别的。
T12、是非题:在89C51的片内RAM区中,位地址和部分字节地址是冲突的。
F13、是非题:中断的矢量地址位于RAM区中。
F14、MCS-51系列单片机是属于( B )体系结构。
A、冯诺依曼B、普林斯顿C、哈佛D、图灵15、89C51具有64 KB的字节寻址能力。
16、是非题:在89C51中,当CPU访问片内、外ROM区时用MOVC指令,访问片外RAM 区时用MOVX指令,访问片内RAM区时用MOV指令。
T17、在89C51中,片内RAM分为地址为00H~7FH 的真正RAM区,和地址为80H~FFH 的特殊功能寄存器(SFR) 区两个部分。
18、在89C51中,通用寄存器区共分为 4 组,每组8 个工作寄存器,当CPU 复位时,第0 组寄存器为当前的工作寄存器。
19、是非题:工作寄存器区不允许做普通的RAM单元来使用。
F20、是非题:工作寄存器组是通过置位PSW中的RS0和RS1来切换的。
T21、是非题:特殊功能寄存器可以当作普通的RAM单元来使用。
F22、是非题:访问128个位地址用位寻址方式,访问低128字节单元用直接或间接寻址方式。
T23、是非题:堆栈指针SP的内容可指向片内00H~7FH的任何RAM单元,系统复位后,SP 初始化为00H。
F24、数据指针DPTR是一个16 位的特殊功能寄存器寄存器。
25、是非题:DPTR只能当作一个16位的特殊功能寄存器来使用。
F26、是非题:程序计数器PC是一个可以寻址的特殊功能寄存器。
F27、在89C51中,一个机器周期包括12 个振荡周期,而每条指令都由一个或几个机器周期组成,分别有单周期指令、双周期指令和4周期指令。
28、当系统处于正常工作状态且振荡稳定后,在RST引脚上加一个高电平并维持 2 个机器周期,可将系统复位。
29、是非题:单片机89C51复位后,其PC指针初始化为0000H,使单片机从该地址单元开始执行程序。
T30、单片机89C51复位后,其I/O口锁存器的值为0FFH ,堆栈指针的值为07H ,SBUF的值为不定,内部RAM的值不受复位的影响,而其余寄存器的值全部为0H 。
31、是非题:单片机系统上电后,其内部RAM的值是不确定的。
T32、以下哪一个为51系列单片机的上电自动复位电路(假设RST端内部无下拉电阻)(P39图2-16(a))。
33、在89C51中,有两种方式可使单片机退出空闲模式,其一是任何的中断请求被响应,其二是硬件复位;而只有硬件复位方式才能让进入掉电模式的单片机退出掉电模式。
34、请用下图说明89C51单片机读端口锁存器的必要性。
读锁存器是为了避免直接读端口引脚时,收到外部电路的干扰,而产生的误读现象。
----------35、请说明为什么使用LED需要接限流电阻,当高电平为+5V时,正常点亮一个LED需要多大阻值的限流电阻(设LED的正常工作电流为10mA,导通压降为0.6V),为什么?解:因为LED导通时,电压降是固定的(0.6V)。
为了使LED既能正常工作(电流为10mA),又不至于被过大的电流损坏,所以必须加一个限流电阻。
--------36、以下哪一条指令的写法是错误的( C )。
A、MOV DPTR,#3F98HB、MOV R0,#0FEHC、MOV 50H,#0FC3DHD、INC R037、以下哪一条指令的写法是错误的( D )。
A、INC DPTRB、MOV R0,#0FEHC、DEC AD、PUSH A38、以下哪一条指令的写法是错误的( B )。
A、MOVC A,@A+DPTRB、MOV R0,#FEHC、CPL AD、PUSH ACC39、是非题:在51系列单片机的指令系统中,其加法、减法、乘法和除法必须有累加器A 的参与才能完成。
T40、以下哪一条是位操作指令( B )。
A、MOV P0,#0FFHB、CLR P1.0C、CPL AD、POP PSW41、以下哪一条是位操作指令( B )。
A、MOV P1,#0FFHB、MOV C,ACC.1C、CPL AD、POP PSW42、以下哪一条是位操作指令( B )。
A、MOV P0,#0FFHB、SETB TR0C、CPL R0D、PUSH PSW43、简述89C51单片机中断的概念。
当CPU正在处理某件事情的时候,外部发生的某一事件请求CPU迅速去处理,于是,CPU 暂时中止当前的工作,转去处理所发生的时间。
中断服务处理完该事件以后,再回到原来被中止的地方,继续原来的工作,这样的过程成为中断。
44、什么是保护现场,什么是恢复现场?保护现场:当CPU响应中断程序时,硬件会自动把断点地址(16位程序计数器的值)压入堆栈之外,用户还须注意保护有关工作寄存器、累加器、标志位等信息;恢复现场:在完成中断服务程序后,恢复原工作寄存器、累加器、标志位等的内容。
45、单片机89C51有哪些中断源,对其中断请求如何进行控制?89C51中断系统有5个中断源:●INT0:外部中断0请求,低电平有效。
通过P3.2引脚输入。
●INT1:外部中断1请求,低电平有效。
通过P3.3引脚输入。
●T0:定时器/计数器0溢出中断请求。
●T1:定时器/计数器1溢出中断请求。
●TXD/RXD:串行口中断请求。
当串行口完成一帧数据的发送或接收时,便请求中断。
46、单片机89C51的5个中断源分别为INT0 、INT1 、T0 、T1 以及TXD/RXD 。
47、单片机89C51的中断要用到4个特殊功能寄存器,它们是TCON 、SCON、IE 以及IP。
48、在89C51中,外部中断由IT0(1)位来控制其两种触发方式,分别是电平触发方式和边沿触发方式。
-------------------49、简述单片机89C51中断的自然优先级顺序,如何提高某一中断源的优先级别。
中断源(控制位)自然优先级外部中断0(PX0)最高定时器/计数器0溢出中断(PT0)外部中断1(PX1)定时器/计数器1溢出中断(PT1)串行口中断(PS)最低若某几个控制位为1,则相应的中断源就规定为高级中断;反之,若某几个控制位为0,则相应的中断源就规定为低级中断。
当同时接收到几个同一优先级的中断请求时,响应哪个中断源则取决于内部硬件查询顺序(即自然优先级)。
--------------------50、是非题:在89C51中,当产生中断响应时,所有中断请求标志位都由硬件自动清零。
F51、中断处理过程分为3个阶段,即中断响应、中断处理以及中断返回。
52、简述51系列单片机中断响应的条件。
●有中断源发出中断请求;●中断总允许位EA=1,即CPU开中断;●申请中断的中断源的中断允许位为1,即中断没有屏蔽;●无同级或更高级中断正在被服务;●当前的指令周期已经结束;●若现在指令为RETI或者是访问IE或IP指令,则该指令以及紧接着的另一条指令已执行完。
53、是非题:在51系列单片机中,中断服务程序从矢量地址开始执行,一直到返回指令RETI 为止。
T54、在51系列单片机执行中断服务程序时,为什么一般都要在矢量地址开始的地方放一条跳转指令?因为51系列单片机的两个相邻中断源中断服务程序入口地址相距只有8个单元,一般的中断服务程序是容纳不下的,因此一般都要在相应的中断服务程序入口地址中放一条跳转指令。
55、为什么一般都把主程序的起始地址放在0030H之后?因为0000H~0030H中有中断的矢量地址,为了避免冲突,一般都把主程序的起始地址放在0030H之后。
56、是非题:在执行子程序调用或执行中断服务程序时都将产生压栈的动作。
T57、单片机89C51片内有两个16 位的定时/计数器,即T0和T1,它们都有定时和事件计数的功能。
58、是非题:定时/计数器工作于定时方式时,是通过89C51片内振荡器输出经12分频后的脉冲进行计数,直至溢出为止。
T59、是非题:定时/计数器工作于计数方式时,是通过89C51的P3.4和P3.5对外部脉冲进行计数,当遇到脉冲下降沿时计数一次。
T60、是非题:定时/计数器在工作时需要消耗CPU的时间。
F61、是非题:定时/计数器的工作模式寄存器TMOD可以进行位寻址。
F62、是非题:定时/计数器在使用前和溢出后,必须对其赋初值才能正常工作。
F63、简述定时/计数器4种工作模式的特点。
模式1:是16位的定时器/计数器;模式2:把TL0(或TL1)配置成一个可以自动重装载的8位定时器/计数器;模式3:对T0和T1大不相同。
若将T0设置为模式3,则TL0和TH0被分为两个相互独立的8位计数器。
定时器T1无工作模式3状态。
模式0:与模式1几乎完全相同,唯一的差别是模式0中,寄存器TL0用5位,TH0用8位。
64、如何运用两个定时/计数器相串联来产生一秒的时钟基准信号。
试画出必要的电路部分,并写出程序。
(设晶振频率为12MHz,用LED显示秒信号。
注:计数器输入端为P3.4(T0)、P3.5(T1)。
)ORG 0000HLJMP MAINORG 000BHLJMP ONEORG 001BHLJMP COUORG 0030HMAIN: MOV P1,0FFHMOV SP,#60HMOV TMOD,#01100001BMOV TL0,#0B0HMOV TH0,#3CHMOV TL1,#0F6HMOV TH1,#0F6HSETB TR0SETB TR1SETB ET0SETB ET1SETB EASJMP $ONE: PUSH PSWMOV TL0,#0B0HMOV TH0,#3CHCPL P1.1POP ACCPOP PSWRETICOU: PUSH PSWPUSH ACCCPL P1.0POP ACCPOP PSWRETIEND65、是非题:在51系列单片机的指令中,既有带借位的减法指令,又有不带借位的减法指令。