机械狗说明书
ZHIYUN SMOOTH 5 说明书

此PDF电子文档支持以下功能**需阅读软件支持,以AdobeReader为例。
SMOOTH 5说明书Z H I Y U N -C N -v 1 . 1 0Contents■■产品清单产品清单■ (1)■■认识SMOOTH■5认识SMOOTH■5■ (3)■■电池及充电说明电池及充电说明■ (4)■■安装及调平安装手机■ (5)安装补光灯■ (6)平衡调节■ (7)■■稳定器的使用控制按键/指示灯/接口说明■ (8)工作模式说明■ (11)手调定位■ (14)快速待机■ (15)收纳■ (15)■■APP的使用下载APP■ (16)如何连接■ (16)APP主要功能介绍■ (17)■■固件升级与校准固件升级■ (18)校准方法■ (20)■■参数说明■■免责声明与警告阅读提示■ (24)警告■ (24)安全操作指引■ (24)■■保修卡质保期限说明■ (26)质保不包括■ (26)为获得智云(ZHIYUN)质保服务,请按下列步骤操作■ (26)■■联络卡产品清单使用本产品前,请仔细检查产品包装内是否包含以下所有物品,若有缺失,请联系客“*”■代表购买SMOOTH■5手机智能云台■COMBO套装包含此配件。
认识SMOOTH 5认识SMOOTH 51.磁吸补光灯安装位2.跟焦/变焦滚轮3.跟焦/变焦切换键4.手柄5.三脚架6.手机供电接口7.手机夹8.横滚轴臂9.横滚轴臂锁紧扳手10.横滚轴电机11.指示灯/控制面板12.俯仰轴电机13.俯仰轴锁紧卡口14.横滚轴锁紧卡扣15.1/4螺纹孔16.电源键17.■FN按键18.手机夹旋转轴19.航向臂20.航向轴电机21.航向轴锁紧开关22.■Type-C充电■/■固件升级接口23.扳机键24.挂绳口25.■鳞甲SMOOTH■5磁吸补光灯(购买SMOOTH■5手机智能云台■COMBO套装包含此配件)电池及充电说明电池及充电说明SMOOTH■5采用内置电池,首次使用前,请先给SMOOTH■5充满电以激活电池,保证产品顺利使用。
柴犬机械狗蓝牙连接操作说明

柴犬机械狗蓝牙连接操作说明
在手机的设置界面中,打开蓝牙功能。
2.连接柴犬机械狗与手机
将柴犬机械狗打开,按照说明书上的操作指引,将柴犬机械狗设置为
与手机进行蓝牙配对。
在APP的主界面中,点击连接按钮,便可开始附近的蓝牙设备。
找到柴犬机械狗的蓝牙名称后,点击进行连接。
3.蓝牙连接成功后的操作
连接成功后,柴犬机械狗会与手机进行同步,在APP上会显示柴犬机
械狗的状态和各项功能。
通过APP的界面或按钮,可以对柴犬机械狗进行各种操作,包括遥控
移动、开关灯光、播放音乐等等。
用户可以根据自己的需求和兴趣,点击相应的功能按钮,便可控制柴
犬机械狗进行相应的动作或行为。
4.APP中的高级功能
比如,可以通过录制和发送语音消息与柴犬机械狗进行对话;也可以
设置定时任务,让机械狗按照预定时间进行特定动作等等。
用户可以根据自己的需要和创造力,探索和利用APP提供的更多功能。
5.注意事项
在操作过程中,需要确保手机和机械狗之间的蓝牙连接稳定,距离不
要过远,以免影响信号。
在柴犬机械狗电量低时,需要及时充电,以保证正常运行。
使用过程中,注意不要将柴犬机械狗置于潮湿或水中,以免损坏设备。
6.结束连接
当不再需要与柴犬机械狗进行蓝牙连接时,可以通过在APP中点击断
开连接按钮,或者关闭手机的蓝牙功能来结束连接。
总结:。
FARO操作手册

FARO EDGE产品介绍•结构1.臂管12.臂管23.探针4.按钮5.手柄6.7轴手柄(可拆卸)7.锁定按钮8.状态面板9.可折叠式触摸屏控制器B驱动器端口11.SD RAM卡端口12.底座卡环FARO EDGE 产品介绍•结构13.减震器14.开/关开关15.电源端口B端口17.以太网端口18.手柄存放磁铁FARO EDGE 安装操作•底座安装通过手柄拧紧底座卡环FARO EDGE 安装操作•探针安装1.握住EDGE的末端的按钮区域2.顺时针旋转探针,将其旋入注意:安装探针时,切勿在按钮区外的地方握住EDGE。
FARO EDGE 安装操作•探针的放置手柄放置时,确保磁扣对齐、吸住。
FARO EDGE 安装操作•FARO EDGE的7轴1.逆时针旋转松开锁定环2.将7轴手柄的前端插入槽里3.向里推7轴手柄,接好接头4.顺时针旋转拧紧锁定环注意:收起设备时,先卸下7轴手柄FARO EDGE 安装操作•FARO EDGE的电源1.电源开关2.电源端口FARO EDGE 安装操作•触摸屏控制器按下底座顶部的锁定装置可以打开触摸屏控制器。
FARO EDGE 安装操作•电池安装1.将圆的一面朝下滑入电池组。
2.向内推动电池,直至其卡入到位。
FARO EDGE 安装操作•电池拆卸1.向右推动电池组释放杆2.将电池组拉出FARO EDGE 安装操作•电池充电1.Edge 接通电源后,电池组便开始充电。
即使电源为关闭位置,电池组也将充电。
电池组充电完毕后将自动停止。
2.电池组内置有电量表。
按下连接器边上的软按钮,观察 LED 即可了解当前电量。
FARO EDGE操作规程•正确操作1.安装FaroEdge时,注意使用正确的手法进行提拎。
2.如果仪器安装在三脚架上,请确保三脚架上的所有螺纹连接已经拧紧;如果安装在磁力吸盘上,检查并除去磁力座的底部油污或铁屑等杂物;如果安装在真空吸盘上,一定要按说明书正确使用,以免漏气发生一些意外。
机械狗说明书
五、最终造型
作品整体造型采用卡通版造型,有浓厚的机器狗感觉,而 且胸前采用“钢铁侠”反应炉设通过草绘曲线,进而生成曲面,然后通 过曲面合并、修剪,最后经过拉伸取出材料而获得。
二、装配设计
进入组件界面,装配时对腿部杆件和头部零件进行约 束,实现机器狗行走时所需的轨迹。
机器狗的创新点: 机器狗的创新点:
1,对仿生行走机构进行了运动分析,将机器狗的四条 腿都创新设计为六杆机构; 2,运用VB对各腿的机构进行仿真,验证设计的科学性 和合理性; 3, 将胸徽设计成“钢铁侠”反应炉的标志,且整体采 用卡通版造型,形象可爱美观,具有浓厚的机器狗感觉; 4,外观造型方面,采用柔和的曲面设计,增加机器狗 的吸引力。
三、工程制图
产品总装配工程图、部分零件工程图 机器狗整体线框图,某个杆件工程图
四、工程仿真 运用Proe对头部关键部位的配合进行动态仿真, 观察各个部件是否会发生干涉。
播放界面
头部运动副简图
零件分模 使用型腔和侧型芯实现塑件的造型,通过侧向 分型与抽机构实现分模和推出塑件。
模具设计
头部分模图
数控编程
谢谢欣赏!
一、数控加工工艺制定 1,采用三轴数控铣床,一次定位装夹加工完型 腔; 2,刀具选用硬质合金钢,端面铣削和斜面铣削 均使用平面铣刀,铣削曲面使用球头铣刀; 3,零件是模具型腔,尺寸精度和表面光洁度要 求较高,要求有精加工。
二、刀位程序及后处理G代码生成 刀位程序及后处理G
$$-> MFGNO / ASM00012 PARTNO / ASM00012 $$-> FEATNO / 57 MACHIN / UNCX01, 1 $$-> CUTCOM_GEOMETRY_TYPE / OUTPUT_ON_CENTER UNITS / MM LOADTL / 1 $$-> CUTTER / 12.000000 $$-> CSYS / 1.0000000000, 0.0000000000, 0.0000000000, 0.0000000000, $ 0.0000000000, 1.0000000000, 0.0000000000, 0.0000000000, $ 0.0000000000, 0.0000000000, 1.0000000000, 0.0000000000 SPINDL / RPM, 2000.000000, CLW RAPID GOTO / -127.1836674940, 144.0000000000, 120.0000000000 FEDRAT / 200.000000, MMPM GOTO / -127.1836674940, 144.0000000000, 78.1149315257 GOTO / 169.0000000000, 144.0000000000, 78.1149315257 GOTO / 169.0000000000, 139.0344826259, 78.1149315257
SMOOTH 4 说明书

ZHIYUN-v1.20 SMOOTH 4说明书Contents■产品概述 (1)■认识Smooth 4 (2)■电池及充电说明 (3)■安装 (4)■稳定器的使用 (5)■APP的使用 (12)■校准与固件升级 (13)■基本参数 (15)■免责声明与警告 (16)■保修卡 (20)■联络卡 (22)产品概述感谢使用ZHIYUN TM 系列产品,ZHIYUN TM 系列产品将带领您深入体验摄影的乐趣。
Smooth 4是一款专为手机摄影设计的全新旗舰型稳定器,丰富的功能按键可以实现手机相机参数的快速设置与镜头跟焦变焦等功能;重新设计的四种稳定器工作模式和操作方式,还可以让您在使用稳定器的过程更加得心应手,获得更加高超的镜头表达手法。
我们相信,全新的Smooth 4稳定器会让您灵感涌现,成为您创作优秀影像的得力助手。
使用产品前,建议您仔细阅读本说明书。
产品概述收纳盒 ×1数据线 ×1主机 ×1三脚架 ×1物品清单使用本产品前,请仔细检查产品包装内是否包含以下所有物品,若有缺失,请联系ZHIYUN 或您的代理商。
1. 横臂调节旋钮2. 手机夹3. 手机充电口4. 跟焦/变焦滚轮5. 操控面板(第5页)6. 1/4英寸螺口7. 横竖拍旋钮8. 俯仰轴电机9. 横滚轴电机10. 锁定卡扣11. 航向轴电机12. T ype-C USB接口13. 背部按钮(第5页)认识Smooth 4认识Smooth 4安装手机拉开手机夹装入手机,并使手机紧靠手机夹背板。
您也可以拧松手机夹背面横竖拍旋钮,然后旋转手机夹来调整手机的横竖拍方向。
安装调整平衡拧松横臂调节旋钮,向左或向右移动俯仰轴电机,使稳定器在如下图放置时,手机能保持左右水平不动,说明平衡适当。
手机的平衡状态对稳定器的续航时间有很大影响。
手机不平衡时稳定器仍可工作,但电机会更多地消耗电量,同时用于增稳的扭力也会变小。
操控面板介绍❸ 滚轮功能切换键 []●单击切换滚轮功能。
特瑞堡密封系统产品说明书
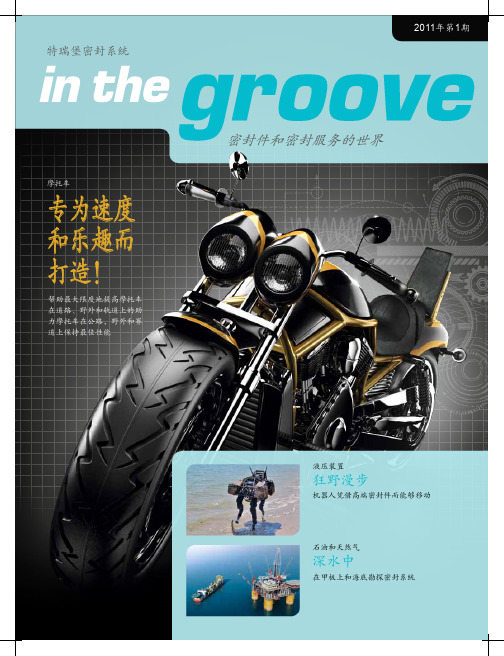
密封件和密封服务的世界液压装置石油和天然气深水中狂野漫步机器人凭借高端密封件而能够移动在甲板上和海底勘探密封系统帮助最大限度地提高摩托车在道路、野外和轨道上的助力摩托车在公路,野外和赛道上保持最佳性能专为速度和乐趣而打造!摩托车2011年第1期特瑞堡密封系统目录3034714中国的扩张提高了特殊处理印度天然气储量展563817294凭借特瑞堡的高端密封件,波士顿动力公司的机器人才得以移动。
想象一下,一个机械化驮骡能够跋涉多岩地带、淌过泥坑、滑过冰层、钻过灌木丛并攀上陡峭的山丘。
它能看到并绕过障碍,经受风吹雨淋,遵照人的指示或自动根据预设的程序行进,始终背负着重达50公斤的负荷。
这听起来像科幻小说中的生物,实际上是称为大狗的四腿机器人, 已经在美国马萨诸塞州的乡村留下了足迹。
大狗及其第二代LS3(Legged Squad Support System 的缩写,步兵班组支援系统)是由波士顿动力公司开发并制造的。
该公司虽小,但拥有尖端技术,其资金由五角大楼的研究机构国防高级研究规狂野漫步123石油天然气大会暨展览会2011年9月6日至8日英国阿伯丁巴西水电展2011年9月20日至22日 巴西里约热内卢印度能源展2011年9月29日至10月1日 印度孟买巴西近海技术会议(OTC)2011年10月4日至6日巴西里约热内卢全球风能大会2011年10月19日至21日 中国北京煤炭采矿博览会2011年10月28日至31日 中国北京瑞典国际工业配件展2011年11月8日至11日 瑞典延雪平国际工程机械展览会2011年11月23日至27日 印度班加罗尔国际工作艇展2011年11月30日至12月2日美国新奥尔良、洛杉矶789456恶劣环境下执行侦查、救援和消防方案的载重机器人20英里以上范围内优异的承载能力由麻省理工学院的前教授用美国五角大楼提供的资金而开发特瑞堡为液压腿部机构提供最佳的高耐用性密封件特瑞堡和波士顿动力公司就第二代人形机器人进行合作简言之…液 压 装 置看到了他这个灵活的机器人的广泛应用,从运载物质到恶劣环境下的侦查、救援和消防任务等各种应用。
机械狗正确操作方法

机械狗正确操作方法机械狗是一种具有智能功能的机器宠物,它能够模拟真实狗狗的动作、声音和行为。
为了正确操作机械狗,以下是一些步骤和方法。
1. 准备:在开始操作机械狗之前,需要确保机械狗已经充电,并且处于开启状态。
同时,查看说明书,了解机械狗的功能和功能键的位置。
2. 启动机械狗:按下机械狗的启动按钮,等待几秒钟,直到机械狗发出“汪汪”的声音并且眼睛发出绿色的光芒。
这表示机械狗已经启动。
3. 成为机械狗的朋友:机械狗可以识别主人的声音和触摸,为了让机械狗与你产生互动,你可以说出机械狗的名字来吸引它的注意。
同时,用手轻轻摸机械狗的头部或背部,让机械狗感受到你的存在。
4. 指令操作:机械狗可以执行许多命令,如走路、停下、跳舞等。
通过声音和手势,你可以向机械狗发送指令。
例如,当你说“走路”的时候,机械狗就会开始走动;当你说“停下”的时候,机械狗会停下来。
此外,你还可以用手指向某个方向或者做出手势来告诉机械狗该往哪个方向走。
5. 语音互动:机械狗拥有语音识别功能,你可以通过说话与机械狗进行对话。
你可以问机械狗一些问题,例如“你好吗?”、“你喜欢做什么?”等等。
机械狗会通过内置的语音模块回答你的问题,你也可以通过语音识别系统与机械狗交流。
6. 保持机械狗的清洁:由于机械狗会在地面上活动,所以它很容易变得脏乱。
定期清洗机械狗,可以使用软布蘸少许清水擦拭机械狗的外壳,避免使用刺激性的清洁品。
确保不把水滴进机械狗的内部。
7. 遥控器操作:机械狗通常配有一个遥控器,用于更精确地控制机械狗的动作。
你可以使用遥控器来控制机械狗的步态、速度和行走方向。
熟悉遥控器的按键和功能,才能更好地操控机械狗。
8. 充电和存放:当机械狗电池不足时,你需要将机械狗连接到电源进行充电。
确保使用正确的充电器,并根据说明书上的充电时间进行操作。
在不使用机械狗时,将其存放在干燥、阴凉的地方,避免暴露在阳光和水中。
9. 软件更新:为了保持机械狗的功能和体验最新,制造商通常会定期推出软件更新。
(有cad图等全套资料)智能机械狗全套毕业设计说明书
毕业设计-智能机械狗全套毕业设计智能机器狗结构设计 摘要 对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器狗将作为家庭的一员进入我们的生活,与我们每天朝夕相处。
可现在普遍存在人们心中的疑问是:将来机器狗将以何种身份进入我们的生活,是玩伴还是佣人,智能机器狗的设计就是为了将来机器狗能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。
本设计采用关节型结构,成功地设计了智能机器狗的本体结构。
本机器狗具有前后行、平地侧行等基本行走功能。
另外机器狗头部还装有CD 摄影机,胸腔内部可装备内置电源和智能设备。
本设计参考了狗的结构组成,使得机器狗结构尽量与狗的本体结构相似,尤其在长度配比方面。
本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。
所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。
伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。
关键词:智能机器狗; 结构设计; 谐波传动 Intelligent robot dog frame designAbstractFor our future life, everyone had different ideas, but most people believe that, in future society, the robot dog as a family into our lives, and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot dog into our lives, playmates or servants, the design of intelligent robot dog is to the future robot can enter our Chinese people's family lives, for our happy family life.The design of a joint structure, the successful design of intelligent robot dog, the body structure. The robot dog has before and after the trip, the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head, chest internal equipment can be built-in power supply, and intelligent. The reference design of the structure of the dog, making the structure as the robot dog, the dog's body similar to the structure, particularly in the area ratio of length. The design of the structure is more complicated, the large number of joints, in an effort to optimize the design, designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer, the slowdown in the programme reduction ratio, high efficiency, The ideal slowdown is a good programme.Keywords intelligent robot dog; structural design; harmonic drive目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 本课题的来源、研究目的和意义 (1)1.2 国内外智能机器人的发展概况 (3)1.3 本设计的主要内容 (5)第2章智能机器狗的设计 (6)2.1自由度的分配及结构方案的设计 (6)2.1.1自由度的分配 (6)2.1.2结构方案的设计 (6)2.2关节驱动方案的选择 (9)2.3传动方案的选择 (10)2.3.1传动方式 (10)2.3.2减速器和减速比的选择 (10)2.3.3电机与减速器的连接方式 (13)2.4结构特点及性能参数 (14)2.4.1智能机器狗的结构特点 (14)2.4.2智能机器狗的结构性能参数 (14)第3章 部分关节部件设计计算 (17)3.1各关节力矩的计算 (17)3.1.1膝关节静力矩的计算 (17)3.1.2髋关节向前后运动自由度的静力矩的计算 (17)3.1.3髋关节左右摆动时静力矩的计算 (18)3.1.4颈关节摆动时的静力矩的计算 (20)3.2谐波传动组件的选择与计算 (20)3.3圆柱齿轮减速器组件选择与计算 (20)3.4各关节所需电机的选择与计算 (21)第4章其它部件的选择 (23)第5章成本估算和环保分析 (25)5.1成本估算 (25)5.2环保与经济分析 (25)结论 (27)致谢 (28)参考文献 (29)附录 (30)第1章绪论1.1本课题的来源、研究目的和意义本课题是机器人宠物项目之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、刀位程序及后处理G代码生成 刀位程序及后处理G
$$-> MFGNO / ASM00012 PARTNO / ASM00012 $$-> FEATNO / 57 MACHIN / UNCX01, 1 $$-> CUTCOM_GEOMETRY_TYPE / OUTPUT_ON_CENTER UNITS / MM LOADTL / 1 $$-> CUTTER / 12.000000 $$-> CSYS / 1.0000000000, 0.0000000000, 0.0000000000, 0.0000000000, $ 0.0000000000, 1.0000000000, 0.0000000000, 0.0000000000, $ 0.0000000000, 0.0000000000, 1.0000000000, 0.0000000000 SPINDL / RPM, 2000.000000, CLW RAPID GOTO / -127.1836674940, 144.0000000000, 120.0000000000 FEDRAT / 200.000000, MMPM GOTO / -127.1836674940, 144.0000000000, 78.1149315257 GOTO / 169.0000000000, 144.0000000000, 78.1149315257 GOTO / 169.0000000000, 139.0344826259, 78.1149315257
三、刀具路径仿真
运用Proe对头部注塑模型腔数控铣加工仿真,此次加工 使用粗加工—半精加工—精加工,一次装夹加工完成型腔。
视频导不出,就截张图片
机器狗的技术难点: 机器狗的技术难点:
1,行走机构的创新设计; 2,通过VB仿真确定各条腿的尺寸; 3,三维造型中曲面的设计; 4,装配过程中为实现前后腿行走轨迹 一致,腿部各杆件的约束; 5,分模时侧抽芯的设计和干涉的分析。
三、工程制图
产品总装配工程图、部分零件工程图 机器狗整体线框图,某个杆件工程图
四、工程仿真 运用Proe对头部关键部位的配合进行动态仿真, 观察各个部件是否会发生干涉。
播放界面
头部运动副简图
零件分模 使用型腔和侧型芯实现塑件的造型,通过侧向 分型与抽机构实现分模和推出塑件。
模具设计
头部分模图
数控编程
谢谢欣赏!
机器狗说明书
一、创意设计
工业设计
基于机构和狗腿部结构的分析,将机器狗的腿部 机构创新设计成六连杆机构,它是由机架、原动件和 两个二级组构成。
行走机构原理图
仿生行走机构杆组法分析
二、设计思路
采用内部上链方式,通过齿轮机构将动力传动到 腿部的各个杆件,实现前左和右后的腿部行走步调一 致,从而驱动机器狗的行走。
机器狗的创新点: 机器狗的创新点:
1,对仿生行走机构进行了运动分析,将机器狗的四条 腿都创新设计为六杆机构; 2,运用VB对各腿的机构进行仿真,验证设计的科学性 和合理性; 3, 将胸徽设计成“钢铁侠”反应炉的标志,且整体采 用卡通版造型,形象可爱美观,具有浓厚的机器狗感觉; 4,外观造型方面,采用柔和的曲面设计,增加机器狗 的吸引力。
内部动力传递图
三、VB仿真验证机构原理 VB仿真验证机构原理 运用VB编程,对机构原理进行动态仿真,验证其的 合理性,进而获得机器狗各腿的尺寸。
单腿仿真窗口
四腿仿真窗口
四、造型建模 结合VB仿真所得出的尺寸和狗的外形设计了各零 部件形状,用三维软件进行建模。
构件简图 三维实体 构件简图 三维实体
五、最终造型
作品整体造型采用卡通版造型,有浓厚的机器狗感觉,而 且胸前采用“钢铁侠”反应炉设计,能够增加玩具狗的吸引力。
工程设计
一、零件机构设计 身体外壳通过草绘曲线,进而生成计
进入组件界面,装配时对腿部杆件和头部零件进行约 束,实现机器狗行走时所需的轨迹。