行星轴齿轮的计算
行星齿轮传动比最简计算方法--公式法

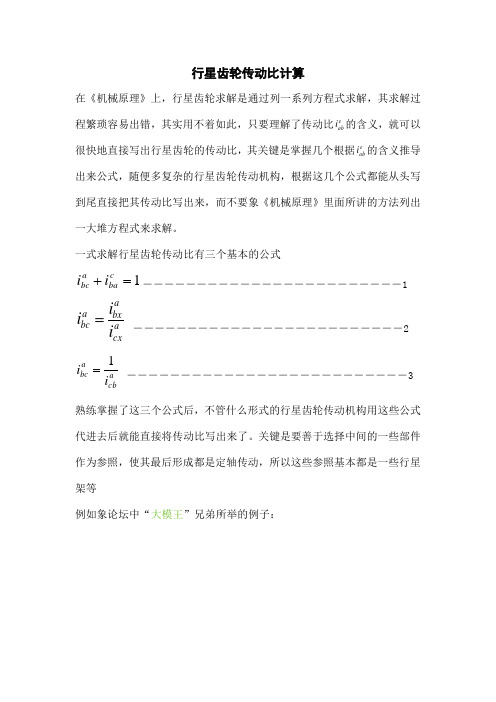
行星齿轮传动比计算在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1 acx a bx abci i i = ―――――――――――――――――――――――――2 a cb abc i i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bci i i =将x 加进去, 所以可以得出:e bx e ax eab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe x ae ebx e ax eab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01c e bd ae c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星齿轮传动比计算公式
行星齿轮传动比计算公式【最新版】目录1.行星齿轮传动比计算公式的概述2.行星齿轮传动比的计算方法3.行星齿轮传动比的特点4.应用行星齿轮传动比的注意事项正文行星齿轮传动比计算公式是一种在机械传动领域中常用的计算方式,它可以帮助我们准确地计算出行星齿轮传动系统中的传动比。
行星齿轮传动比计算公式的概述如下:行星齿轮传动比是指主动轮(太阳轮)的角速度与从动轮(行星轮)的角速度之比。
在行星齿轮传动系统中,太阳轮通过行星轮向外界输出动力,因此,行星齿轮传动比的计算至关重要。
它可以帮助我们了解传动系统的工作状态,以及调整传动系统中的参数,以达到最佳的工作效果。
行星齿轮传动比的计算方法如下:假设太阳轮的齿数为 Z1,行星轮的齿数为 Z2,太阳轮的角速度为ω1,行星轮的角速度为ω2。
那么,行星齿轮传动比计算公式可以表示为:传动比 = ω1 / ω2 = Z1 / Z2在实际应用中,行星齿轮传动比通常是瞬时传动比,即太阳轮和行星轮的瞬时角速度比。
但是,在某些特殊情况下,例如当太阳轮和行星轮的转速相同时,瞬时传动比就会变为恒定的平均传动比。
行星齿轮传动比具有以下特点:1.行星齿轮传动比是瞬时传动比,即随太阳轮和行星轮的角速度变化而变化。
2.行星齿轮传动比的计算方法简单,只需要知道太阳轮和行星轮的齿数和角速度即可。
3.行星齿轮传动比可以帮助我们了解传动系统的工作状态,以及调整传动系统中的参数,以达到最佳的工作效果。
应用行星齿轮传动比时,需要注意以下事项:1.确保行星齿轮传动比的计算准确无误,以免影响传动系统的工作效果。
2.根据行星齿轮传动比的计算结果,及时调整传动系统中的参数,以达到最佳的工作效果。
3.注意行星齿轮传动比的变化规律,以便在传动系统出现异常时,及时进行处理。
行星齿轮传动比最简计算方法--公式法

在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bxa bc i i i = ―――――――――――――――――――――――――2a cb a bc i i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出e ab i =,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bci i i =将x 加进去, 所以可以得出:e bx e ax eab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe x ae ebx e ax eab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01c e bd ae c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星齿轮传动比计算公式

行星齿轮传动比计算公式
摘要:
一、行星齿轮传动简介
二、行星齿轮传动比计算公式
三、行星齿轮传动比计算公式的应用
正文:
行星齿轮传动是一种常见的机械传动方式,它具有体积小、重量轻、传动比稳定等优点,广泛应用于各种机械设备中。
在行星齿轮传动中,传动比的计算是非常重要的,下面我们来介绍行星齿轮传动比计算公式。
行星齿轮传动比计算公式如下:
传动比= (太阳轮齿数/ 行星轮齿数) × (行星轮转速/ 太阳轮转速)
其中,太阳轮齿数和行星轮齿数是指太阳轮和行星轮上的齿数,行星轮转速和太阳轮转速是指行星轮和太阳轮的转速。
这个公式可以帮助我们计算行星齿轮传动的传动比,从而更好地设计机械设备。
在实际应用中,行星齿轮传动的传动比计算公式是非常重要的,它可以帮助我们选择合适的齿轮参数,使机械设备能够正常运行。
除了计算传动比外,我们还可以利用行星齿轮传动比计算公式来分析行星齿轮传动的特点。
例如,我们可以通过计算不同齿轮参数下的传动比,来分析行星齿轮传动在传动比方面的优缺点。
这样,我们就可以更好地设计行星齿轮传动,使其在传动比方面更加优秀。
总之,行星齿轮传动比计算公式是行星齿轮传动设计中非常重要的一个公
式,它可以帮助我们计算行星齿轮传动的传动比,从而更好地设计机械设备。
行星齿轮计算iso9085

-0.247 1.104 13.617 1.489 18.369 12.907
1.995 0.034 0.046
系数Bk 动载系数KV
Bk=|1c'*Ca/((Ft*Ka)/ b)| KV=N(Cv1*B p+Cv2*Bf+Cv 3*Bk)+1
单位载荷Fm/b(小于100时 Fm/b=Ft*KA*
mt=mn/cosβ sinβb=sinβ*cos αn gα =1/2*((da1^2db1^2)^0.5+(d a2^2db2^2)^0.5)a*sinαwt pbt=mt*π*cosα t
0.183 13.1740134
15
9
7.174013395
22.174
22.174 196.3480268
d1=Mn*Z1/CO SΒ
0 0.34906585
170
d2=Mn*Z2/CO
分度圆直径d2
SΒ
180
2 未变位时中心距Ad 3 中心距变动系数Yn 4 啮合角awt
Ad=Mn*(Z1+Z 2)/2COSΒ Yn=(AAd)/Mn tgat=tgan/COS β
at=arctgat COSα wt=Ad/A*COS at
临界转速比N(共振区 0.2~0.5) 总重合的εγ
N=n1/nE1 εγ=εα+εβ
系数Cv1/Cv2/Cv3
齿廓偏差跑合量yp1/yp2 有效基节偏差fpbeH 齿距偏差跑合量yf
0.32 yp=ya=0.075*f pb fpbeH=fpb-yp yf=0.075*fta
有效齿廓形状偏差ffeH ffeH=fta-yf
行星齿轮传动比最简计算方法公式法
行星齿轮传动比计算在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1a cxa bxa bcii i =―――――――――――――――――――――――――2 acba bci i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如象论坛中“大模王”兄弟所举的例子:在此例中,要求出eab i =,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cxabxa bci i i =将x 加进去,所以可以得出:e bxe axe abi i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe xae e bxe axe abi i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01ce b d a ec e b dc e a c xbe xae e bx e ax eab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星齿轮传动比8个公式
行星齿轮传动比8个公式
1.齿轮比计算公式:
齿轮比=-(R+2)/(R+1),其中R为行星轮的齿数。
2.行星轮直径公式:
行星轮的直径可以通过行星轮齿数来计算。
行星轮直径=齿数*模数。
3.太阳轮直径公式:
太阳轮的直径可以通过太阳轮齿数来计算。
太阳轮直径=齿数*模数。
4.行星轮轮齿厚度公式:
行星轮的轮齿厚度可以通过行星轮直径和模数来计算。
行星轮轮齿厚度=2*模数。
5.太阳轮轮齿厚度公式:
太阳轮的轮齿厚度可以通过太阳轮直径和模数来计算。
太阳轮轮齿厚度=2*模数。
6.行星齿轮传动的速度比公式:
速度比=齿数A/齿数B,其中齿数A为太阳轮齿数,齿数B为行星轮齿数。
7.行星齿轮传动的扭矩比公式:
扭矩比=(半径A/半径B)^2,其中半径A为太阳轮半径,半径B为行星轮半径。
8.行星齿轮传动的传动效率公式:
传动效率=输出功率/输入功率。
综上所述,行星齿轮传动的8个常用公式分别是齿轮比计算公式、行星轮直径公式、太阳轮直径公式、行星轮轮齿厚度公式、太阳轮轮齿厚度公式、行星齿轮传动的速度比公式、行星齿轮传动的扭矩比公式和行星齿轮传动的传动效率公式。
这些公式帮助工程师在设计和计算行星齿轮传动时能够准确地确定齿轮比、轮齿尺寸和传动性能等参数,从而提高传动系统的可靠性和效率。
行星齿轮减速器的相关计算
行星齿轮减速器旳有关计算
2.1.1分析法
2.1.1.1相对速度法 相对速度法又称转化机构法,首先由威尔斯(Willes)于1841年
提出旳。理论力学中旳相对运动原理,即“一种机构整体旳绝对运动 并不影响机构内部各构件间旳相对运动”。这正如一手表中旳秒针、 分针和时针旳相对运动关系不因带表人旳行动变化而变化。根据这一 相对运动原理,我们给整个行星轮系加上一种与转臂H旳角速度ωH大 小相等、方向相反旳公共角速度(-ωH)后,则行星机构中各构件间 旳相对运动关系仍保持不变。但这时转臂H将固定不动,行星轮系便 转化成了定轴齿轮传动,此假想旳定轴齿轮传动称为原行星齿轮传动 旳转化机构。这么便可用定轴齿轮传动旳传动比计算措施,首先算出 转化机构旳传动比,进而求得行星齿轮传动各构件间旳传动比。
主从动轮,则其传动比为:
H
i ab
H
a H
b
a
b
z z z H g b b
z z z H
a
g
a
(2.1-1)
4
行星齿轮减速器旳有关计算
5
行星齿轮减速器旳有关计算
6
行星齿轮减速器旳有关计算
7
行星齿轮减速器旳有关计算
8
行星齿轮减速器旳有关计算
2.1.1.2各类行星齿轮传动旳传动比计算
因为啮合副中旳小齿轮采用正变位(x1>0),当其齿数比u=z2/z1旳 值一定时,能够使小齿轮旳齿数z1<zmin,而不会产生根切现象,从而可 减小齿轮旳外形尺寸和重量。同步因为小齿轮采用正变位,其齿根厚度 增大,齿根旳最大滑动率减小,故可改善磨损情况和提升承载能力。
44
行星齿轮减速器旳有关计算
采用高度变位虽可在一定程度上改善行星齿轮传动旳性能, 但存在一定旳缺陷,如在小齿轮齿根强度提升旳同步,大齿轮旳 齿根强度有所下降;齿轮副不能采用更大旳模数等。故在行星齿 轮传动中较为广泛旳是采用角变位传动。 2.3.2.2 角度变位齿轮传动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1行星轴大齿轮的计算过程:
1.1大齿轮基本外形齿的确定:
行星轮的直径φ=60,所以齿轮的孔是60mm
大齿轮的齿宽:B1=75mm;
大齿轮分度圆:d1=292mm;
齿形角取:α=20°;
螺旋角去:β=14°;
参照《机械原理》表10-1中看,取模数m=2.5;
m n=d1cosβ/Z1,推出Z1= d1cosβ/m=292xcos14°/2.5=113.3mm
则取Z1=117;
齿顶圆:da1=( Z1+2h a*)m=(117+2x1)x2.5=297.5mm; (h a*=1, c*=0.25) 齿根圆:df1=(117-2h a*-2c*)m=(117-2x1-2x0.25)x2.5=286.25mm;
齿全高:h1=(2h a*+c*)m=(2x1+0.25)x2.5=5.625mm;
齿槽宽:e1=πm/2=πx2.5/2=3.927mm;
1.2 大齿轮型式的确定:
因为行星轴大齿轮的齿顶圆直径大于
160mm,又小于500mm,故选用腹板式结
构。
d=60mm;
d1=1.6d=96mm;
L=(1.2—1.5)d≥b=(72—90) ≥75=75;
C=0.3m=0.3x75=22.5mm;
n =0.5m=1.25 则取n为1.5mm;
δ=(2.5—4)m≥8—10=6.25—10则取δ为20mm;
D1= df1-δ=286.25-20=266.25mm;
D0=0.5(D1+d1)=0.5(276.25+96)=181.125mm;
d0=0.25(D1-d1)=0.25(266.25-96)=42.25,这里取d0=45mm.
1.3 大齿轮键槽的确定:
因为这个齿轮工作时只有键槽的两侧受力,所以选用普通的平键,选择两端为圆头的A型平键,,这种平键结构简单、拆装方便、对中性好。
因为行星轴的直径为60mm,大齿轮宽为75mm,查阅《机械设计课程设计》中的表14-26,选择16x10x50的平键,轮毂的键槽深度t1=4.3mm.
2 行星轴小齿轮的计算过程:
2.1大齿轮基本外形齿的确定:
行星轮的直径φ=60,所以齿轮的孔是60mm
小齿轮的齿宽:B1=75mm;
小齿轮分度圆:d1=292mm;
齿形角取:α=20°;
螺旋角去:β=14°;
参照《机械原理》表10-1中看,取模数m=2.5;
m n=d2cosβ/Z2,推出Z2= d2cosβ/m=292xcos14°/2.5=39.59mm
则取Z2=40;
齿顶圆:da2=( Z2+2h a*)m=(40+2x1)x2.5=105mm; (h a*=1, c*=0.25)
齿根圆:df2=(40-2h a*-2c*)m=(40-2x1-2x0.25)x2.5=93.75mm;
齿全高:h2=(2h a*+c*)m=(2x1+0.25)x2.5=5.625mm;
齿槽宽:e2=πm/2=πx2.5/2=3.927mm;
2.2 小齿轮型式的确定
因为行星轴大齿轮的齿顶圆直径大于160mm,故选用实心式结构。
2.3 小齿轮键槽的确定:
因为这个齿轮工作时只有键槽的两侧受力,所以选用普通的平键,选择两端为圆头的A型平键,,这种平键结构简单、拆装方便、对中性好。
因为行星轴的直径为60mm,小齿轮宽为50mm,查阅《机械设计课程设计》中的表14-26,选择16x10x32的平键,轮毂的键槽深度t2=4.3mm.。