一种用于空巢老人陪护的远程医疗服务机器人设计——软件及控制系统设计
远程控制的医疗陪护机器人的制作方法
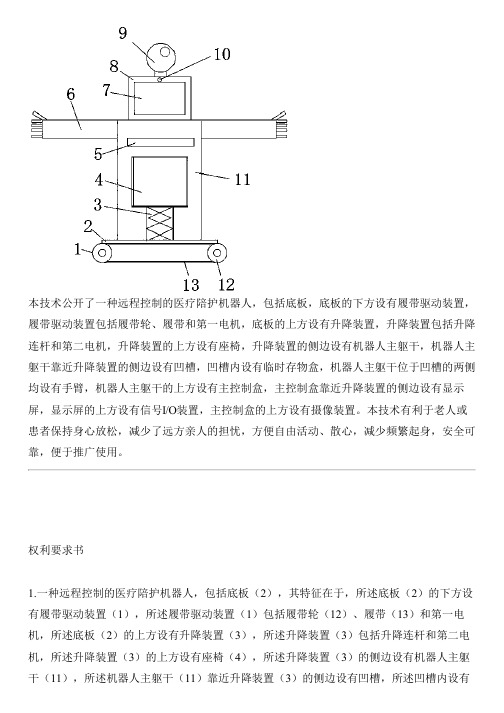
本技术公开了一种远程控制的医疗陪护机器人,包括底板,底板的下方设有履带驱动装置,履带驱动装置包括履带轮、履带和第一电机,底板的上方设有升降装置,升降装置包括升降连杆和第二电机,升降装置的上方设有座椅,升降装置的侧边设有机器人主躯干,机器人主躯干靠近升降装置的侧边设有凹槽,凹槽内设有临时存物盒,机器人主躯干位于凹槽的两侧均设有手臂,机器人主躯干的上方设有主控制盒,主控制盒靠近升降装置的侧边设有显示屏,显示屏的上方设有信号I/O装置,主控制盒的上方设有摄像装置。
本技术有利于老人或患者保持身心放松,减少了远方亲人的担忧,方便自由活动、散心,减少频繁起身,安全可靠,便于推广使用。
权利要求书1.一种远程控制的医疗陪护机器人,包括底板(2),其特征在于,所述底板(2)的下方设有履带驱动装置(1),所述履带驱动装置(1)包括履带轮(12)、履带(13)和第一电机,所述底板(2)的上方设有升降装置(3),所述升降装置(3)包括升降连杆和第二电机,所述升降装置(3)的上方设有座椅(4),所述升降装置(3)的侧边设有机器人主躯干(11),所述机器人主躯干(11)靠近升降装置(3)的侧边设有凹槽,所述凹槽内设有临时存物盒(5),所述机器人主躯干(11)位于凹槽的两侧均设有手臂(6),所述机器人主躯干(11)的上方设有主控制盒(8),所述主控制盒(8)靠近升降装置(3)的侧边设有显示屏(7),所述显示屏(7)的上方设有信号I/O装置(10),所述主控制盒(8)的上方设有摄像装置(9)。
2.根据权利要求1所述的一种远程控制的医疗陪护机器人,其特征在于,所述主控制盒(8)与第一电机、第二电机、手臂(6)和摄像装置(9)相连。
3.根据权利要求1所述的一种远程控制的医疗陪护机器人,其特征在于,所述主控制盒(8)内设有控制模块以及动力电源。
4.根据权利要求1所述的一种远程控制的医疗陪护机器人,其特征在于,所述信号I/O装置(10)与主控制盒(8)和远程手机或者电脑客户终端连接。
空巢老人陪伴型机器人设计

2019.18科学技术创新1概述根据国家统计局数据显示,截止到2017年,中国60周岁及以上老年人口共计2.408亿;预计到2025年,这一人口数量将达到4亿,我国将成为世界上老年人占比最大的国家。
人口老龄化日益严重,空巢老人所占比重迅速攀升,一系列的社会问题亟待解决。
空巢老人由于没有亲人的陪伴,长期处于孤独的状态,从而引发一系列的生理、心理问题,如身体健康状况得不到重视,产生焦虑、抑郁心理疾病,所以给予空巢老人应有的关怀与陪伴已经刻不容缓。
日本作为目前世界上人口老龄化比较严重的国家,投入了大量的人力物力致力于老人陪伴机器人的研究,并且在近几年也取得了一些成果。
如图1所示:日本高校科研机构历时数年所研发的“TWENDY-ONE ”机器人,这款机器人可以辅助老人起床,并且可以自主行走,自行判断,避开障碍物;日本索尼公司在近几年推出的新一代机器人狗“爱宝”,该机器人可以感知外界的距离,并且具有发声和处理声音的功能,与其他陪伴型机器人不同,它的主要功能变成了娱乐;松下电器推出的老人陪伴机器人“泰迪”可以实现与老人的连续沟通;欧姆龙公司推出的机器人“尼克罗”采用人工毛皮,集成传感和人工智能技术,可以对主人表达自己的感受。
图1c.将底板通过仿真器与PC 机连接,可以通过CCS6界面显示出气压、海拔等信息。
结束语本文基于OMAPL138为处理器的ARM/DSP 双核架构,实现对GPS 和INS 信号的接收及处理,从而设计了GPS/INS 组合定位系统,实时显示当前位置的经纬度,气压等信息。
参考文献[1]赵胜林.一种GPS 导航定位仪设计与应用研究[D].哈尔滨:哈尔滨工业大学,2005.[2]马宏阳,程鹏飞,黄华东.GPS/INS 位置、速度和姿态全组合导航系统研究[J].测绘通报,2016(3):10-14.[3]Xue Y,Liu C,Chen Y,et al.Design and Realization of In -ertial Attitude Determination System Based on OMAPL138and FPGA[J].Computer Measurement &Control,2017.[4]赖贵川,黄华伟.基于MS5611-01BA01的高精度气压和温度检测系统设计[J].四川理工学院学报(自科版),2012,25(5):33-36.[5]朱阳,王伟成,王民慧.基于MPU9150的四轴飞行器姿态控制系统设计[J].制造业自动化,2015(10):46-48.作者简介:唐立伟(1975-),男,研究方向:工业控制。
关注空巢老人自助医疗护理器械产品设计
关注空巢老人自助医疗护理器械产品设计作者:赵超来源:《设计》2012年第02期摘要:随着21世纪的到来,我国人口老龄化的速度加快,空巢老人现象也日益加剧,如何解决空巢老人的护理问题已经成为社会的焦点。
现如今,传统家庭养老的功能已经日益弱化,虽然空巢老人对医疗卫生服务的需求不断增加,但是医疗护理器械尤其是自助医疗护理在国内发展相对滞后,远远不能够满足空巢老人对医疗护理的需求。
因此,积极探索新形势下发展空巢老人自助医疗器械的新途径、新办法,已势在必行。
关键词:空巢老人护理器械自助医疗当与子女分开之后,面对空荡的房间和漫长的独独居生活,空巢老人在身心健康方面会受到一定的影响,在此情况下,会产生各种心理反应。
与此同时,空巢老人也面临着身体状况越来越差、患病率越来越高、行为不便等问题。
例如,高血压病、糖尿病、心脏病等都是老年人的常见病,这些疾病一旦形成,则很难治愈,而且常伴有不可逆的并发症,需要终生治疗及护理,既损害老年人的躯体健康,又影响了老年人的日常生活活动能力。
现代社会,居家养老已经成为一种趋势,虽然现阶段老年人的家庭医疗护理方面较过去有了一定的改善,但是对于许多的空巢老人而言,现阶段的医疗护理水平仍然不能满足他们的需求,因此,解决老年人尤其是空巢老人在自助医疗护理方面中面临的问题将会是未来阶段的研究重点。
所谓“自助医疗器械”,就是使用者在不借助他人的情况下,仅仅依靠使用者本人一个人的力量,并在可操控范围之内便可完成治疗动作的医疗器械称之为自助医疗器械。
空巢老人除了具有与一般老年人的共性外,由于其不与家庭和成员或是相关护理人员居住,因此,在产品设计方面应该区别于普通老年人。
一、现阶段空巢老人家庭医疗护理器械的发展现状近年来,随着医疗器械的不断发展,家庭医疗护理器械的种类也在日益更新。
老年人的数量急剧增加,导致市场需求不断扩大。
政府和企业对这个特殊群体需求的关注也在的日益增长。
即使如此,现阶段空巢老人产品市场发展仍面临着诸多的问题。
助老服务机器人系统设计及软件架构
助老服务机器人系统设计及软件架构助老服务机器人系统设计及软件架构一、引言随着全球人口老龄化趋势的加剧,助老服务的需求日益增长。
然而,人口老龄化也带来了社会护理员短缺的问题。
为了解决这一难题,助老服务机器人应运而生。
本文将介绍助老服务机器人系统的设计和软件架构,以满足老年人的日常需求和提供必要的协助。
二、助老服务机器人的主要功能助老服务机器人的主要功能包括但不限于以下几个方面: 1. 日常陪伴和交流:助老服务机器人能够陪伴老年人进行日常交流,提供心理支持,减轻他们的孤独感。
2. 生活照料:助老服务机器人可以协助老年人进行日常生活照料,如帮助洗衣、煮饭、清洁等。
3. 健康监测:助老服务机器人配备身体健康监测装置,可以实时监测老人的体温、血压等生理参数,及时发出警报并通知相关人员。
4. 个性化推荐:通过了解老年人的喜好和需求,助老服务机器人可以提供个性化的推荐,如电影、音乐、书籍等。
提供兴趣爱好的满足,增加生活乐趣。
三、助老服务机器人系统设计助老服务机器人系统设计主要包括硬件设计和软件设计两个方面。
硬件设计方面,助老服务机器人需要具备以下硬件组件:1. 语音识别和合成模块:用于与老年人进行语音交流,并根据指令进行相应操作。
2. 视觉感知模块:通过摄像头获取环境信息,实现人脸识别、情绪识别等功能。
3. 运动控制模块:通过电机和传感器实现机器人的运动控制,包括行走、抓取等。
4. 健康监测装置:包括体温、血压、心率等传感器,用于老年人健康状态的监测。
软件设计方面,助老服务机器人需要具备以下软件功能:1. 语音交互系统:通过语音识别和合成技术实现与老年人的语音交流,提供日常问答、聊天等功能。
2. 智能推荐系统:根据老年人的个人喜好和需求,为其提供个性化的推荐,如电影、音乐等。
3. 行为规划系统:根据老年人的日常需求和习惯,制定相应的行为规划,自动完成日常生活中的一些任务。
4. 健康监测系统:与健康监测装置相连接,实时监测老年人的生理参数,并根据预设的阈值进行相应处理。
老年陪护机器人系统的设计与实现
【Key words】escort robot;speech recognition;underactuated flexible system
1 引 言
全 国老龄办 关 于人 口老龄 化 的报告 认 为 ,21世 纪 的中 国将 是 一个 不可 逆转 的 老龄社 会 。在 当前 阶 段 ,中国将 平均每年新 增 596万老年 人 口 ,到 2020年 , 老 年人 口将 达 到 2.48亿 。随 着 中国老 年人 数量 的增 加 ,“421”家庭 数量 激增 ,调 查显 示 :有 35% 的家庭要 赡 养 4位 老 人 ,49% 的城 市 家庭 要 赡养 2~3位 老 人 。 针对 老年人 的心理 孤寂及 “心理养 老”的需求 ,根据 老 年 人使 用 的趣 味性 、功 能性 和易操 作性 要求 ,研 制 开 发 老年陪 护机器人产 品 ,填 补 国内老年陪护机 器人产 品空 白的需求变得尤 为迫切 。
proposed to realize high simulative drive frame and motion models at a low cost.In this paper,the total frame
of robot system , speech recognition system and m otor control system are introduced.
technology is used to build robust recognition model,realize high per formance and real-time speech recognition
system. Based on modeling movements of real animals, an underaetuated f lexible motor control system is
一种家用助老机器管家的设计
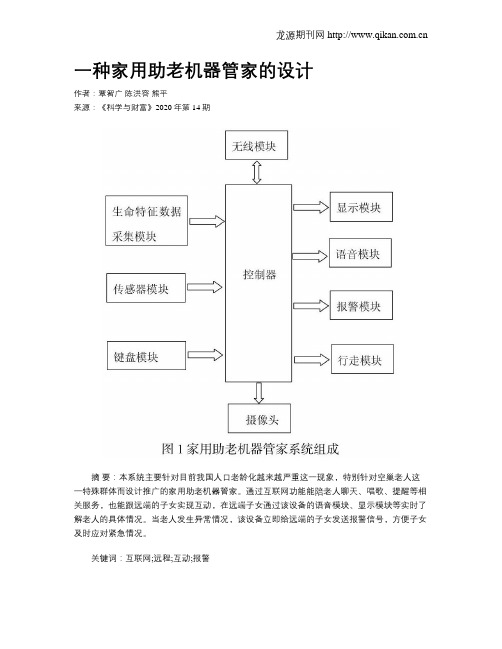
一种家用助老机器管家的设计作者:覃智广陈洪容熊平来源:《科学与财富》2020年第14期摘要:本系统主要针对目前我国人口老龄化越来越严重这一现象,特别针对空巢老人这一特殊群体而设计推广的家用助老机器管家。
通过互联网功能能陪老人聊天、唱歌、提醒等相关服务,也能跟远端的子女实现互动,在远端子女通过该设备的语音模块、显示模块等实时了解老人的具体情况。
当老人发生异常情况,该设备立即给远端的子女发送报警信号,方便子女及时应对紧急情况。
关键词:互联网;远程;互动;报警一、必要性我国已经进入人口老龄化快速发展时期,目前已有老龄人口1.69亿,占总人口数的12%,据全国老龄办统计数据显示,有近一半的老人属于城乡空巢家庭或类空巢家庭。
养老问题,尤其是空巢老人问题,已经成为全社会共同关注的话题。
所以,为了缓解社会压力的,解决许多子女无暇照顾老人的这种情况,家用助老机器管家已经成为一种新的迫切的社会需求。
家用助老机器管家这一块是一个前景十分光明的行业,首先,从国家层面来说,我国人口老龄化程度越来越严重,这是一个客观的现实,国家要解决这方面的问题,必须要大力支持这些高科技,为国家解决空巢老人这一社会问题;其次,从社会角度来分析,现在,由于国家之前的独生子女政策,许多年迈的父母家中都只有一个孩子,而如果两个独生子女孩子的结合,将给孩子带来非常重的负担,所以,传统的在家养老的情况已经是不可能的了,所以社会更需要养老这方面的诉求。
家用助老机器管家的发展潜力巨大,市场应用前景广阔!二、发展现状相比工业机器人,服务机器人特别是其中的助老机器人,属于新兴行业,全球规模较大的服务机器人企业产业化历史也多在5-10年,大量公司仍处于前期研发阶段;另一方面,服务机器人更加靠近下游终端消费者且应用场景千差万别,客户群体更加广泛。
因此,服务机器人的市场空间比工业机器人更加广阔。
从全球范围来看,世界各国纷纷将突破服务机器人技术、发展服务机器人产业摆在本国科技发展的重要战略地位。
“友依”空巢老人智能陪伴产品设计

“友依”空巢老人智能陪伴产品设计汇报人:2023-12-16•产品背景与需求分析•产品功能设计•产品硬件设计目录•产品软件设计•产品测试与优化•产品推广与市场策略•总结与展望01产品背景与需求分析空巢老人常常感到孤独和无助,缺乏与他人的交流和互动。
孤独感安全问题生活不便空巢老人在家中可能面临一些安全隐患,如突发疾病、意外摔倒等,而无人知晓。
随着年龄的增长,空巢老人可能会遇到一些生活上的困难,如购物、做饭、洗衣等。
030201空巢老人现状及问题空巢老人对智能家居产品的需求较高,如智能门锁、智能照明、智能家电等。
智能家居需求空巢老人需要定期监测身体状况,如血压、血糖、心率等,以便及时发现并处理健康问题。
健康监测需求空巢老人渴望与他人保持联系和交流,分享生活点滴和感受。
社交互动需求市场需求调研一款专为空巢老人设计的智能陪伴产品,集智能家居控制、健康监测、社交互动等功能于一体。
产品定位年龄在60岁以上,子女不在身边或无法经常陪伴的空巢老人。
目标用户产品定位与目标用户02产品功能设计智能语音交互功能语音输入与识别支持老人通过语音与设备进行交互,设备能够准确识别老人的语音指令。
自然语言处理设备能够理解老人的自然语言表达,进行智能回答和交流。
语音合成与输出设备可将文字信息转化为语音输出,方便老人听取信息。
生理参数监测实时监测老人的心率、血压、血氧等生理参数,并进行分析和记录。
健康提醒根据老人的生理参数及日常习惯,提供个性化的健康提醒和建议。
异常预警当监测到老人生理参数异常时,及时发出预警并通知紧急联系人。
健康监测与提醒功能030201提供丰富的音乐资源,支持老人通过语音或触摸操作播放喜欢的音乐。
音乐播放内置大量有声读物资源,满足老人阅读需求,同时缓解视觉疲劳。
有声读物提供适合老人的益智游戏,锻炼老人的思维能力和反应速度。
益智游戏娱乐休闲功能支持老人通过一键操作呼叫紧急联系人,确保在紧急情况下能够及时获得帮助。
医疗服务机器人控制系统设计
医疗服务机器人控制系统设计1. 引言1.1 背景介绍医疗服务机器人控制系统设计,是当前机器人技术和医疗服务领域交叉发展的重要领域之一。
随着人口老龄化加快和医疗需求不断增长,医疗服务机器人在手术、康复、护理等方面的应用愈发广泛。
目前医疗服务机器人控制系统设计仍存在一些问题和挑战,需要进一步研究和探索。
医疗服务机器人控制系统的设计背景是由于人类医疗资源有限、分布不均等问题,加之医务人员工作强度大、效率低等诸多因素所致。
引入机器人技术来辅助医疗服务已成为当前的发展趋势。
医疗服务机器人不仅可以提高医疗服务质量和效率,还可以减轻医务人员的工作压力,提高医疗资源利用率。
随着科技的不断发展和创新,医疗服务机器人控制系统设计正在逐渐完善和优化。
越来越多的研究和实践证明,医疗服务机器人在治疗和康复过程中能够取得显著的效果和成就。
加强医疗服务机器人控制系统设计的研究,对提高医疗服务水平、推动医疗服务机器人技术的发展具有重要意义。
1.2 研究意义医疗服务机器人控制系统是一种集合了机器人技术与医疗服务的创新技术。
研究医疗服务机器人控制系统的意义在于提高医疗服务的效率和质量,缓解医疗资源不足的问题,同时也为医护人员减轻工作负担,提高工作效率。
通过医疗服务机器人控制系统的设计和应用,可以实现医疗服务的自动化、智能化,提高手术精准度和安全性,将手术时间缩短,减少感染风险,进而提高患者的治疗效果和生存率。
医疗服务机器人控制系统还可以结合大数据、人工智能等技术,为临床决策提供更加准确的数据支持,提高疾病诊断和治疗的准确性。
研究医疗服务机器人控制系统的意义还在于推动医疗服务向智能化、高效化的方向发展,促进医疗行业的技术创新和发展。
这项研究也为我国在医疗机器人领域的发展提供了重要的技术支持,具有重要的战略意义和推动作用。
2. 正文2.1 医疗服务机器人控制系统基本组成医疗服务机器人的控制系统是实现机器人功能的核心部分,其基本组成包括传感器、执行器、控制器和通信模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种用于空巢老人陪护的远程医疗服务机器人设计——软件及控制系统设计邓陈凯(淮阴工学院)摘要:本文以淮阴工学院2013级毕业设计为背景,介绍了助老机器人的控制系统的软硬件结构和开发流程。
该机器人主要机架由周义强同学设计制作,以Freescale半导体公司生产的MC9S12XS128为核心控制器,在CodeWarrior 5.1 开发环境中进行软件开发。
整个系统涉及机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。
为了提高助老机器人的行驶速度和可靠性,对比了不同方案的优缺点,并结合PC调试平台进行了大量底层和上层测试,最终确定了现有的系统结构和各项控制参数。
关键词::Freescale 助老机器人摄像头 PID控制1 助老机器人设计制作思路及技术方案概要说明1.1 助老机器人整体框架助老机器人是在车模结构的框架上,搭上硬件结构,通过单片机的处理能力,将传感器采集到的信息处理分析后得出运算结果,指挥电机和舵机做出适应实际需求的一套系统。
其硬件结构框架如下图:图1.1 硬件结构框架示意图1.2 周围环境检测周围环境的检测是机身控制的基础,为了提高行驶的稳定性和优化行车线路,很多设计都把重点放在使传感器感知更远的距离上、获取更多的信息。
现在我们采用的为摄像头方案,这种方案获取的赛道信息丰富,但电路设计和软件处理较复杂,且信息更新速度较慢。
一方面,摄像头所能检测的路况信息远多于“线型检测阵列”所能检测的信息,有利于区分各种道路类型;另一方面,摄像头检测范围调整灵活,可以提供足够远的预判距离。
实际上,通过“超频”和提高代码效率,并选择合适的图像处理算法,使用比赛规定的单片机完全可以对低线数黑白摄像头的视频信号进行采样和处理,有效识别出路况信息。
1.3 机身控制助老机器人应根据前方道路类型和当前机身的位置误差及速度,对舵机转角和驱动电机PWM 波的占空比进行及时调整。
关于这方面的控制方案有PID 控制、Bang-Bang 控制和模糊控制等。
电机速度闭环控制使用PID 控制。
2 控制电路设计说明硬件组成:主板、驱动板、摄像头、旋转编码器、伺服电机和直流电动机2.1 主板主板集成了机器人控制的所有电路,稳定性很重要。
2.1.1 CPU 选型我们选用了FreescaleMC9S12XS128 作为微控制器,前期考察了MC9S12XS128,以下简称S12。
S12 是一款常用的16 位MCU,有丰富的片内资源,其资料丰富。
S12 的片内RAM 为8KB,能基本满足摄像头图像采集时保存多个帧缓冲区的需要;S12 的最高CPU 总线频率为40MHz,可以将其超频至80MHz 甚至更高进行使用,然而这是以牺牲稳定性为代价的。
采用中断进行软件计数会消耗大约10%的CPU 资源;采用外部计数电路会导致电路臃肿,体积膨胀;采用时分复用计数端口的思路则会牺牲速度测量的准确性。
此外,S12 不具有外部总线,为了对摄像头信号进行采集,只能使用片内的AD 转换器,其转换速率较低,导致图像每行的点数不能满足需求。
如果需要输入片外数字信号,则有两种思路:使用同步信号和不使用同步信号。
使用同步信号会造成速度过慢的问题,不使用同步信号则需要将指令周期与收到数据的周期进行精确的对齐,稍有差错就会采集到无效的数据。
图2.1.1 核心板实物2.1.2 电源模块设计电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。
机器人系统中接受供电的部分包括:传感器模块、单片机模块、电机驱动模块、伺服电机模块等。
设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。
可靠的电源方案是整个硬件电路稳定可靠运行的基础。
机器人全部硬件电路的电源由7.2V,2A/h 的可充电镍镉电池提供。
由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。
机器人所需电源如图2.1.2所示。
图2.1.2 电源整体原理图2.1.2 按钮和蜂鸣器图 2.1.4 按钮、蜂鸣器电路图2.1.3 外围接口主板需要和一些外部设备进行连接,因此需要留出一些接口。
由于这是一个私人使用的小系统,接口不需要遵循公共的标准,只要定义清晰、插拔方便、不容易混淆或反插即可。
需要留出的接口如下:一个JTAG 接口,14pin,用于连接JTAG、OSBDM 等烧写器对单片机进行编程。
一个带电源的SPI 接口,6pin,用于连接支持SPI 总线协议的外围设备。
一个带电源的SCI 接口,4pin,用于连接支持SCI 总线协议的外围设备。
一个带电源输入、2 路GPIO 及4 路PWM 信号输出的接口,10pin,用于连接电机驱动板,并从电机驱动板获取电源。
一个带电源和一路PWM 的接口,3pin,用于连接舵机。
2.2 驱动板单片机输出使用两种模拟电平来表示0 和1 的数字信号,然而输出电流很小,无法直接连接直流电动机之类的大电流器件,因此需要使用驱动电路。
为了能让直流电动机在四个象限内工作,需要使用H 桥电路。
为了缩短开发周期,我们使用了成熟的BTS7960B 芯片进行电机驱动。
一片BTS7960B 是一个半桥,使用两片BTS7960B 芯片组成一个H 桥驱动一个电机。
图2.2 BTS7960 功能示意图上图中两片BTS7960B 组成的电路有三路输入信号,分别对应使能和两个半桥。
我们将使能信号连接至S12的IO 口,半桥控制信号连接至S12的PWM 端口,通过调节输出PWM 信号的占空比来实现对电机力矩的控制,上层通过一个闭环反馈实现速度控制。
2.3 摄像头数字摄像头是一种数字视频的输入设备,利用光电技术采集影像,而不像视频采集卡那样首先用模拟的采集工具采集影像,再通过专用的模数转换组件完成影像的输入。
数字摄像头的优点是使用简单,输出即为数字信号。
模拟摄像头多为CCD 的,按不同档次分辨率不同。
与数字摄像头同级的模拟摄像头一般有较高的分辨率,较好的实时性。
主板上具有模拟视频输入接口,因此我们选择模拟摄像头。
经过一些比较,我们选择了一款模拟针孔CCD 摄像头。
图2.3 摄像头安装位置2.4 NRF24L01无线通信模块该射频模块集成了NORDIC 公司生产的无线射频芯片NRF24L01支持2.4GHz 的全球开放ISM 频段,最大发射功率为10dBm ,功耗低,等待模式时电流消耗为22uA 。
图2.4 无线通信模块示意图2.5 伺服电机舵机接受脉冲信号作为控制信号。
舵机每捕捉到一次脉冲,就根据脉冲的宽度,通过内置的闭环控制系统旋转到相应的位置。
脉冲之间的间隔不能太短,否则会导致舵机工作不正常,通常取10-20ms 。
我们都使用单片机的PWM 模块来控制舵机,使单片机输出一个50-100Hz 的PWM ,通过调节PWM 的占空比来实现舵机的控制。
我们选用辉盛M995型号的舵机,如图所示:2.6 直流电机选用的普通的直流减速电机。
3 控制软件设计说明3.1 系统片内资源MC9S12XS单片机是以CPU12的V2内核为核心的单片机系列。
最高总线速度从25MHz提高到了40MHz。
128KFlash,8K RAM,2K EEPROM、2个SCI,2个SPI、1个IIC、2个CAN、16路12位ADC、8路PWM、8路16位定时/计数器、一个16位秒冲累加器,支持单线BDM调试。
3.2 视频采集得到一段视频信号后,可以从中提取黑线位置,是否为起始线,这些信息可以被用于舵机和电机等执行器件进行控制。
采集到的图像分辨率为172*40,主要包含前景和背景两部分。
前景是指路线上的黑色部分,包括黑线和起始线。
背景指路线上未贴黑线的白色部分,以及道路外的其它部分。
将数字图像分为多个子区域被称为图像分割。
3.3 速度控制分层是解决系统复杂性的有效方法。
我们的速度控制算法分为顶层和底层,顶层负责根据传感器的信息给定一个速度,底层负责通过闭环反馈来进行速度控制。
3.3.1 顶层速度控制采用了简单的顶层速度控制算法,在采集到的图像中,如果前方没有障碍物,就给高速,否则就给低速。
低速设置为路况中转弯的极限速度,实际表明,采用这种方法进行速度分配,直行,转弯都能安全通行。
3.3.2 底层速度控制底层速度控制是采用的PID控制。
考虑到电机的非线性特征,在根据PID得出PWM值之后,进行了一个非线性的二次曲线转换。
加入转换后,在正反两个方向上,电机都能在确定的时间中转满方向。
3.4 舵机控制3.4.1 舵机顶层控制量选定机器人在运行过程中,需要用舵机来控制摄像头的转向,还有,需要通过舵机来控制机械手臂的上下运动。
所以舵机顶层控制量选用的是摄像头直面前方的位置,机械手的最上面的位置。
3.4.2 舵机顶层控制量修正对于机械手的上下运动,通过对顶层控制量的修正,来完成这几项任务。
参考文献1 Tinku Acharya 等. 数字图像处理——原理与应用.清华大学出版社,20072 龚路,王浩,黄炫圭. 第六届全国大学生“飞思卡尔”杯智能汽车竞赛上海交大SmartStar队技术报告[R].上海:上海交通大学,20113 李向南,饶建华,王冲等.宝石磨雕机器人软件控制系统的设计和实现[J].制造业自动化,2012(1)4 刘存桓.基于视觉信息的移动机器人非线性控制系统设计[D].山东大学,20125 党宏社,韩崇昭,段战胜. 智能车辆系统发展及其关键技术概述. 公路交通科技2002 年12 月Vol.19-No.69 周风余,田国会,郭丹,等. 助老助残服务机器人机载计算机软件系统设计及实现[N]. 山东大学学报( 工学版),2011(1).附录C程序代码void main(void){/* put your own code here */chaopin();pwm_init();SPI_Init();SciInit();需要使用药物Nrf24l01_init();RX_mode_init();PIT();DDRB=0XFF; //舵机接口DDRM=0XFF; //电机方向控制syn6288(text1,sizeof(text1));Delay1ms(500);syn6288(text2,sizeof(text2));Delay1ms(1000);EnableInterrupts;for(;;) {for(time=0;time<500;time++){status=Read_IRQ(&statusT,&statusR,&statusM) ; if(statusM) {Clr_IRQ();}if(statusT) {Clr_IRQ();}if(statusR) {Clr_IRQ();RxPacket();}fangxiang1=RxData[2];fangxiang2=RxData[3];jiaodu[0]=RxData[4];jiaodu[1]=RxData[5];//动作控制jiaodu[2]=RxData[6];jiaodu[3]=RxData[7];sudu=RxData[8]; //速度控制wenzi[0]=RxData[9];wenzi[1]=RxData[10];wenzi[2]=RxData[11];wenzi[3]=RxData[12];wenzi[4]=RxData[13];wenzi[5]=RxData[14];wenzi[6]=RxData[15];wenzi[7]=RxData[16];wenzi[8]=RxData[17];wenzi[9]=RxData[18];wenzi[10]=RxData[19];wenzi[11]=RxData[20];//接收文字wenzi[12]=RxData[21];wenzi[13]=RxData[22];wenzi[14]=RxData[23];wenzi[15]=RxData[24];wenzi[16]=RxData[25];wenzi[17]=RxData[26];wenzi[18]=RxData[27];wenzi[19]=RxData[28];// wenzi[20]=RxData[30];// wenzi[21]=RxData[31];}if(fangxiang1==1&&fangxiang2==1) {PTM_PTM0=1;PTM_PTM1=0;PTM_PTM2=1;PTM_PTM3=0;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==2&&fangxiang2==2) {PTM_PTM0=0;PTM_PTM1=1;PTM_PTM2=0;PTM_PTM3=1;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==1&&fangxiang2==2) {PTM_PTM0=0;PTM_PTM1=1;PTM_PTM2=1;PTM_PTM3=0;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==2&&fangxiang2==1) {PTM_PTM0=1;PTM_PTM1=0;PTM_PTM2=0;PTM_PTM3=1;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==0&&fangxiang2==0) {PTM_PTM0=1;PTM_PTM1=1;PTM_PTM2=1;PTM_PTM3=1;PWMDTY01=0;PWMDTY23=0;}if(wenzi[0]!=0){for(ycc=0;ycc<=21;ycc++){if(wenzi[ycc]!=0){// text[ycc]=wenzi[ycc];ymm=ymm+1;}else{break;}}syn6288(wenzi,ymm);Delay1ms(3000);ymm=0;}loop foreverplease make sure that you never leave main */ }附2图1.1 助老机器人实物图。