基于红外传感器的智能循迹小车设计
基于红外传感器的自寻迹小车控制系统的设计
排的间距 (100 mm ) ,可以计算出此时车身与赛道的夹 角 。但是 ,只有夹角并不能表明车身偏移赛道中心的 情况 ,还要考虑赛道的相对位置 。综合两个因素 ,误差 的总公式如下 :
e ( t) = a + kP
(1)
式中 : e ( t)为误差 ; a为车身与赛道的夹角 ; P为引导线
W ANG Kang, Q IN M ing ( Key Laboratory of M EM S of Educational M inistry, Southeast University, Nanjing 210096, China)
动电机输入一定的占空比 ,使电机工作在一定转矩 ,由 ·61·
·计算机与自动化技术 ·
电子工程师
2008年 11月
于车在赛道上行驶时负载不断变化带来了电机工作时 的波动 ,影响了车的实际速度 ,采用 P ID 调节控制算法 能对直流电机的加减速度进行快速准确的调节 ,可以 减小由于电池或场地等原因造成的速度无规则变化 。
Keywords: infrared sensor; self2tracking; smart car
(上接第 55页 )
Study on S igna l Acquisition and D ig ita l Processing of Da ta from M EM S Hum id ity Sen sor
图 3 M C33886驱动芯片
图 4 软件运行总流程
首先 ,智能车系统通过红外采集模块获取前方引 导线的信息 ,同时通过速度传感器模块实时获取车的 速度 。然后 , HCS12 利用获得的传感器的数据 ,计算
出当前车与引导线的相对位置 ,求得车身与黑线位置 的偏差 ,接着采用 P ID 控制方法对舵机进行反馈控制 。 最后 ,赛车根据检测到的速度 ,结合速度控制策略 ,采 用 P ID 闭环控制 ,及时调整车速到预定速度 ,在保证小 车不脱离轨道的情况下 ,以尽可能快的速度前进 。
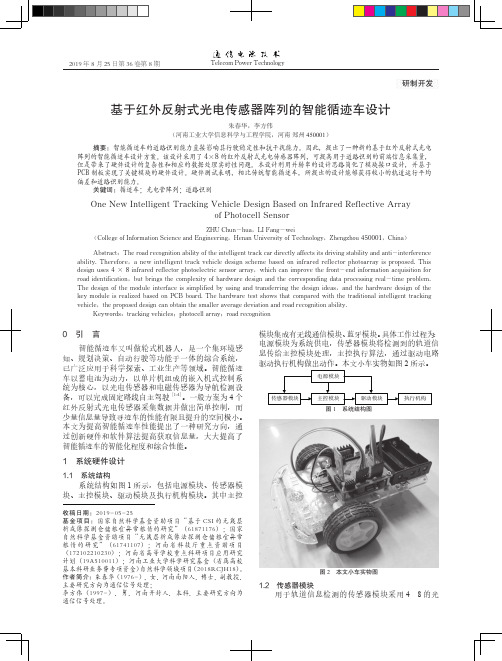
基于红外反射式光电传感器阵列的智能循迹车设计
0 引 言
智能循迹车又叫做轮式机器人,是一个集环境感 知、规划决策、自动行驶等功能于一体的综合系统, 已广泛应用于科学探索、工业生产等领域。智能循迹 车以蓄电池为动力,以单片机组成的嵌入机式控制系 统为核心,以光电传感器和电磁传感器为导航检测设 备,可以完成固定路线自主驾驶 [1-4]。一般方案为 4 个 红外反射式光电传感器采集数据并做出简单控制,而 少量信息量导致寻迹车的性能有限且提升的空间极小。 本文为提高智能循迹车性能提出了一种研究方向,通 过创新硬件和软件算法提高获取信息量,大大提高了 智能循迹车的智模块
主控 模块
驱动 模块
图 1 系统结构图
执行 机构
收稿日期:2019-05-25 基金项目:国家自然科学基金资助项目“基于 CSI 的无线层 析成像探测仓储粮食异常粮情的研究”(61871176);国家 自然科学基金资助项目“无线层析成像法探测仓储粮食异常 粮 情 的 研 究”(61741107); 河 南 省 科 技 厅 重 点 资 助 项 目 (172102210230);河南省高等学校重点科研项目应用研究 计划(19A510011);河南工业大学科学研究基金(省属高校 基 本 科 研 业 务 费 专 项 资 金 )自 然 科 学 领 域 项 目( 2 0 1 8 R C J H 1 8 )。 作 者 简 介:朱 春 华( 1 9 7 6 - ),女 ,河 南 南 阳 人 ,博 士 ,副 教 授 , 主要研究方向为通信信号处理; 李方伟(1997-),男,河南开封人,本科,主要研究方向为 通信信号处理。
2019 年 8 月 25 日第 36 卷第 8 期
基于红外线传感器的智能寻迹小车设计
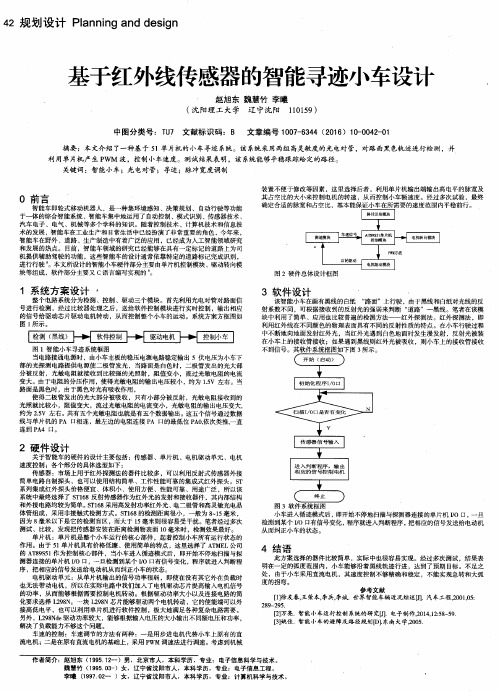
图 2硬件 总体设计框 图
1系统 方案设计 ・
整个电路系统分为检测 、控制 、驱动三个模块 。首先利用光 电对 管对路 面信 号进行检测 ,经过 比较器 处理之后 ,送给软件控制模块进行实 时控制 ,输出相应 的信号给驱动芯 片驱动 电机转动 ,从而控制整个小车 的运动 。系统方案方框图如 图1 所示 。
3 软件 设计
’
检测 ( 黑线) 卜- — . {软件控制 卜 . - ■ 驱动电机 - ■ . {控制小车
图 1智 能小车寻迹 系统 框图 当电路接通电源时 ,由小车主板的稳压电源电路稳 定输 出 5伏电压为小车下 部的光探测 电路提供 电源使 二极管发光 ,当路面是 白色 时,二极 管发出的光大部 分被反射 ,光敏 电阻就接 收到比较强的光照射 ,阻值变小 ,流过 光敏电阻的电流 变大。由于 电阻 的分压作用 ,使得光敏电阻的输出电压较小 , 约为 1 . 5 v 左右 。当 路面是黑色时 ,由于黑色对光有吸收作用 , 使得二极管发 出的光 大部 分被吸收 ,只有小部分被反射 ,光敏 电阻接 收到的 光照就比较小 ,阻值变大 ,流过光敏 电阻 的电流变小 ,光敏电阻 的输 出电压变大, 约为 2 . 5 V 左右 。 共有五个光敏 电阻也就是有五个数据输出。这五个信号通过数据 线与单片机的 P A 1 3 相连, 最左边的 电阻连接 P A 3的最低位 P 1 A O , 依次类推, 一直 连到 P A 4 口。
摘要 :本 文介 绍了一种基 于 5 l 单片机的小车寻迹 系统。该 系统采用两组高灵敏度 的光 电对管 ,对路面黑 色轨迹进行检 测,并 利 用单 片机产 生 P WM 波 ,控制 小车速度 。测试 结果表 明,该 系统能够平稳跟踪给定的路 径。 关键词 :智能小车;光 电对 管;寻迹 ;脉冲 宽度调制
智能循迹小车
智能循迹小车随着科技的飞速发展,无人驾驶技术逐渐成为现代交通领域的重要组成部分。
其中,智能循迹小车作为一种先进的无人驾驶车辆,具有广泛的应用前景。
本文将介绍智能循迹小车的基本原理、系统构成、设计方法以及应用场景。
智能循迹小车通过传感器感知周围环境,包括道路标志、其他车辆、行人等信息,再通过控制系统对感知到的信息进行处理和分析,制定出相应的行驶策略,最终控制车辆的行驶。
其中,循迹小车通过特定的传感器识别道路标志,并沿着标志所指示的路径行驶,实现自动循迹。
传感器系统:用于感知周围环境,包括道路标志、其他车辆、行人等信息。
常见的传感器包括激光雷达、摄像头、超声波等。
控制系统:对传感器感知到的信息进行处理和分析,制定出相应的行驶策略,并控制车辆的行驶。
常用的控制系统包括基于规则的控制、模糊控制、神经网络等。
执行机构:根据控制系统的指令,控制车辆的行驶速度、方向等。
常见的执行机构包括电机、舵机等。
电源系统:提供电力支持,保证小车的正常运行。
常用的电源包括锂电池、超级电容器等。
硬件设计:根据需求选择合适的传感器、控制系统、执行机构和电源等硬件设备,并对其进行集成设计,保证各个设备之间的兼容性和稳定性。
软件设计:编写控制系统的程序,实现对车辆的控制。
常用的编程语言包括C++、Python等。
在软件设计中需要考虑如何处理传感器感知到的信息,如何制定行驶策略,以及如何控制执行机构等方面的问题。
调试与优化:通过实验测试小车的性能,发现问题并进行优化。
常见的调试和优化方法包括调整控制系统的参数、更换硬件设备等。
智能循迹小车具有广泛的应用前景,主要包括以下几个方面:交通管理:用于交通巡逻、交通管制等,提高交通管理效率。
应急救援:在灾难现场进行物资运输、人员疏散等任务,提高应急救援效率。
自动驾驶:作为无人驾驶车辆的样机进行研究和发展,推动自动驾驶技术的进步。
教育科研:用于高校和研究机构的科研项目,以及学生的实践和创新项目。
基于红外光电传感器的智能车自动寻迹系统设计

基于红外光电传感器的智能车自动寻迹系统设计一、本文概述随着科技的飞速发展,智能化、自动化的技术在各个领域得到了广泛的应用。
在智能交通系统中,智能车自动寻迹系统以其高效、准确的特点,受到了广泛的关注。
本文旨在探讨基于红外光电传感器的智能车自动寻迹系统的设计,以期能为智能交通系统的发展提供有益的参考。
本文将详细介绍红外光电传感器的工作原理及其在智能车自动寻迹系统中的应用。
红外光电传感器作为一种非接触式的测量工具,具有灵敏度高、响应速度快、抗干扰能力强等优点,因此在智能车自动寻迹系统中具有广泛的应用前景。
本文将深入探讨智能车自动寻迹系统的总体设计方案。
包括系统的硬件设计,如红外光电传感器的选型、电路设计、微处理器的选择等,以及软件设计,如路径识别算法、运动控制算法等。
通过对这些关键技术的详细分析,以期能为实际系统的设计提供有益的参考。
本文将通过实例分析,验证所设计的智能车自动寻迹系统的性能。
通过在不同环境下进行实际测试,收集并分析系统的寻迹精度、速度、稳定性等数据,从而评估系统的性能,并提出改进意见。
本文旨在对基于红外光电传感器的智能车自动寻迹系统进行全面、深入的研究,以期能为智能交通系统的发展提供有益的参考。
二、红外光电传感器原理及特性红外光电传感器是一种利用红外线进行非接触式测量的传感器,其基本原理是基于光电效应和红外辐射的特性。
红外光电传感器内部包含一个发射器和一个接收器,发射器发射出特定波长的红外线,当这些红外线遇到物体后,部分会被反射回接收器。
根据物体对红外线的反射程度,接收器可以感知到物体的存在及其与传感器的距离。
红外光电传感器具有多种特性,使其特别适用于智能车自动寻迹系统。
红外光对许多物体的穿透能力较弱,因此传感器能够精确地感知物体表面的细节,这对于智能车寻迹系统中的路径识别非常关键。
红外光电传感器对环境光线的变化不敏感,即使在日光下也能正常工作,这使得系统在各种光线条件下都能保持稳定的性能。
基于红外反射式光电传感器的智能循迹小车

基于红外反射式光电传感器的智能循迹小车闫俊旭1侯超2(1.太原科技大学电子信息工程学院山西太原0300242.太原重型机械厂山西太原030024)摘要:本文介绍了一种智能寻迹小车的设计与实现。
基于红外反射式光电传感器的寻迹原理,采用AT89C52单片机为核心控制器件,通过红外传感器检测路面信息,单片机获取路面信息后,进行分析、处理,最后控制步进电机调节转向和转速。
实验表明:该系统抗干扰能力强、电路结构简单,能够准确实现小车沿给定的黑线快速、平稳行驶。
关键词:AT89C52、反射式光电对管(RPR220)、步进电机Design of Autonomous Tracing System based on single chip microcomputerYan Junxu1Hou Chao2(1. Institute of Electronic and Information; Taiyuan University of Science andTechnology; Taiyuan 030024; China2.Taiyuan Heavy Mavhinery Group Co.,LTD; Taiyuan 030024; China)Abstract: Based on infrared reflective photoelectric sensor tracing principle, a intelligent tracing car which used AT89C52 microcontroller as the core control device was designed. When infrared sensor detects the information of road, the microcontroller analysis, process, and finally control the stepper motor adjust the steering and speed. Experiments show the intelligent tracing car had the feature of the anti-jamming ability and a simple circuit structure, and can achieve a given car black line along the fast, smooth driving accurately.Keywords: AT89C52, reflective photoelectric tube (RPR220), stepper motor引言:智能汽车作为一种智能化的交通工具,体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势。
基于红外反射式光电传感器的智能循迹小车
基于红外反射式光电传感器的智能循迹小车
本文所述的智能寻迹小车采用红外光电传感器来识别道路中央的黑色引导线,通过单片机来控制步进电机调节转向和转速,从而实现小车快速稳
定的寻迹行驶。
为保证小车在行驶的过程中具有良好的操纵稳定性和平顺性,本文针对道路特点对小车的方向控制和速度控制,以及传感器的安装都提出
了较为理想的解决方案。
1 系统工作原理
1.1 智能小车寻迹原理
在智能车系统中,寻迹电路采用红外光电传感器进行检测并且寻迹运动。
红外发射管发射的红外线具有一定的方向性,当红外线照射到白色地面
时会有较大的反射,如果距离取值合适,红外接收管接收到反射回的红外线
强度就较大;如果红外线照射到黑色标志线,黑色标志线会吸收大部分红外光,红外接收管接收到红外线强度就很弱。
寻迹时,引导线是黑颜色,不宜反光,当红外发射管输出信号照射到黑色引导线上时输出一个非常微弱的低电平,
这个过程是一个负跳变过程,通过对此信号高低电平的检测就可以知道小车
是正在沿着引导线行驶,若不是沿着引导线行驶,单片机根据传感器送回的。
智能小车红外循迹2024
引言:智能小车红外循迹技术是一种基于红外传感器的自动导航技术,它可以使小车能够根据外界环境发出的红外信号进行导航,实现自动巡航。
本文将从红外循迹技术的原理、应用场景、具体实现方法、优缺点以及未来发展等方面详细讨论。
概述:红外循迹技术是智能小车领域中的重要技术之一,通过红外传感器感知地面上的红外信号,从而确定小车的行驶路径。
该技术常用于自动导航和避障等场景中,具有较高的可靠性和稳定性。
下面将详细探讨智能小车红外循迹技术的相关内容。
正文内容:一、红外循迹技术的原理1.红外传感器的工作原理2.红外信号与地面的交互3.红外循迹算法的实现二、红外循迹技术的应用场景1.工业自动化领域中的应用2.家庭服务中的应用3.自动驾驶车辆中的应用三、智能小车红外循迹技术的具体实现方法1.硬件方案1.1红外传感器选择与安装1.2控制模块设计与搭建1.3电源管理与供电设计2.软件方案2.1红外信号的数据处理2.2循迹算法的设计与实现2.3控制系统的编程与调试四、智能小车红外循迹技术的优缺点1.优点1.1精确度高1.2反应速度快1.3成本较低2.缺点2.1受环境因素影响较大2.2对于不同地面的适应性较差2.3容易受到干扰五、智能小车红外循迹技术的未来发展1.红外循迹技术在自动驾驶领域的应用前景2.其他导航技术与红外循迹技术的结合3.红外传感器的性能改进与创新总结:智能小车红外循迹技术是一种基于红外传感器的自动导航技术,其原理是通过感知地面上的红外信号来确定小车的行驶路径。
红外循迹技术广泛应用于工业自动化、家庭服务和自动驾驶车辆等领域。
该技术具有精度高、反应速度快以及成本低的优点,但也存在受环境因素影响较大、对不同地面适应性差以及易受干扰等缺点。
未来,红外循迹技术在自动驾驶领域的应用前景广阔,并且可以通过与其他导航技术的结合以及红外传感器的性能改进与创新来进一步提升其应用效果和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于红外传感器的智能循迹小车设计
首先设计基于ARM Cortex-M3内核的智能小车控制系统,利用模块化的理念设计了无线通信、红外传感器、避障模块、电机驱动、电机测速、电源管理等硬件模块,采用NRF24L01设计了智能小车的无线通讯系统,利用红外传感器沿白线寻迹,采用光电编码器实现小车的测速功能,设计了小车行车程序,实现小车按控制者要求完成特定路线,并通过软件速度调节实现小车启停、匀速和加减速控制。
标签:NRF24L01无线传输;智能小车;红外传感器寻迹
引言
在当代智能化的潮流下,通过智能化能从很大程度上减轻人工的工作负担,是今后的发展方向。
本设计的智能寻迹小车,可以按照预设的模式在一个预先安置轨迹的环境里,根据指令在不同的预设节点间自行运作,并具避障能力。
采用STM32F103VBT6芯片作为小车的检测控制核心;采用以LM339电压比较器为核心的红外传感器模块进行循迹,并采用hc-sr04超声波模块检测障碍物,使微处理器按照预设的模式控制小车进行寻迹和避障。
1 控制系统结构和无线通信网络设计
基于ARM Cortex-M3 内核的STM32F103VBT6微处理器芯片和nRF24L01的智能小车涉及到传感器应用、无线传输等。
智能小车上电后,可由上位机确定小车的工作方式(待机,循迹或避障等);循迹,避障模块是根据相应传感器所检测数据来执行相应动作。
为了获取对小车方位的精准定位,这里选择建设坐标的方式并根据运行情况更新坐标。
(1)要实现自动寻迹,智能小车的传感器系统必须通过各类传感器,获取小车的状态、场地环境特征两种信号。
(2)预行轨道设计.本设计的预设主行驶轨迹分为横向(Y轴)与纵向(X 轴)。
节点标志为与主行驶轨迹垂直,且于主行驶轨迹等宽的一条线段与主行驶轨迹的交点。
即主行驶轨迹X轴与Y轴的交点也视为一个节点。
2 控制系统硬件和软件设计
智能小车的硬件采用模块化设计理念,智能小车的硬件设计如图2所示,主要包括以下几个方面。
(1)处理器模块。
该模块是智能小车的“大脑”,用于接收指令,发出控制命令,MCU选用了基于ARM Cortex-M3内核的STM32F1
03VBT6微处理器芯片。
(2)循迹模块。
该模块采用以LM339电压比较器为核心制作的4路红外传感器,可识别白线和黑线。
当感应到传感器反射回来的红外光时,红色指示灯亮,输出为低电平;当味感应到传感器反射回来的红外光时,指示灯不亮,输出高电平。
通过编程实现智能小车的寻迹。
(3)电机驱动模块。
设计采用TB6612FNG电机驱动模块。
TB6612FNG是基于MOSFET的H桥集成电路,效率远高于晶体管H桥驱动器。
相比L293D 每通道平均600ma的驱动电流和1.2A的脉冲峰值电流,它的输出负载能力提高了一倍。
相比L298N的热耗性和外围二极管续流电路,它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。
对于PWM信号,高达100KHz的频率相比以上2款芯片的5KHz和40KHz也具有非常大的优势。
并配合4个直流减速电机和麦克纳姆轮已达到可以随意切换4个行进方向。
(4)无线通信模块。
采用nRF24L01,nRF24L01输出功率频道选择和协议的设置可以通过SPI接口进行设置。
几乎可以连接到各种单片机芯片,并完成无线数据传送工作。
电流消耗极低:当工作在发射模式下发射功率为0dBm时电流消耗为11.3mA,接收模式时为12.3mA,掉电模式和待机模式下电流消耗更低。
(5)避障模块。
选用hc-sr04超声波模块检测障碍物。
考虑到在不同的场合下,照明光源可能不同,对于在车身上侧的红外传感器可能会有未知的干扰。
而且考虑到在工厂中可能会存在抛光金屬类的对红外光漫反射性差的障碍物,可能对于红外传感器无法正确识别。
超声波对外界光线和电磁场不敏感,可用于黑暗、有灰尘或烟雾、电磁干扰强、有毒等恶劣环境中。
本设计对于测距的要求不是很长,所以选用了超声波传感器。
3 红外传感器寻迹算法设计
//侧方的红外传感器检测到设定位置,控制电机停止
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1)==Bit_RESET)
{
systick_config(10);while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1)==Bit_RESET)
{
forward();//前进程序
}
stop();//停止程序
x--;
systick_config(1000);
}
传感器检测到小车偏离轨道,自动校正回直线
if((GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4)==Bit_RESET)&&(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_5)!=Bit_RESET)){
Setleft(seep);//传感器检测到向右偏移,左电机加速,小车校正回原轨道
}
elseif((GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_5)==Bit_RESET)&&(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_4)!=Bit_RESET)){
SetRight(seep);//传感器检测到向左偏移,右电机加速,小车校正回原轨道
}
else
{
hold(seep);//传感器未检测偏移,小车保持原来状态行驶
}
4 结束语
本文主要分析红外传感器在智能小车寻迹方面的应用,采用nRF24L01无线
通讯模块,实现了上位机对小车的控制,控制芯片基于ARM Cortex-M3内核的微处理器,硬件采用模块化设计理念设计无线通讯模块、寻迹模块、电机驱动模块等硬件模块,设计了智能小车上位机控制系统,使得本智能小车能在多种场合使用,对于智能小车的控制研究和控制平台的设计有十分重要的意义。
参考文献
[1]申忠宇,郑启文,王川,等.无线通信网络的多智能小车编队控制系统[J].南大学学报,2013.
[2]强彦,叶文鹏,屈明月,等.基于红外避障的智能小车的设计[J].太原理工大学计算机科学与技术学院,2013.
[3]陈晖,张军国,李默涵.基于STC89C52和nRF24L01的智能小车设计[J].现代电子技术2012,35(17).
[4]张伟,陈迎,韩丽娜,等.智能小车系统的设计[J].实验室研究与探索,2011,30(9).。