雷达与雷达模拟器
雷达回波模拟器系统设计与实现

雷达回波模拟器系统设计与实现雷达回波模拟器系统设计与实现引言:雷达回波模拟器是一种用于模拟雷达系统的测试和评估的关键设备,可以在实验室环境中模拟各种真实的雷达回波信号。
本文基于雷达回波模拟器的设计与实现,详细介绍了该系统的原理、结构、主要模块和软硬件实现。
一、系统原理雷达回波模拟器系统是通过生成合成的雷达回波信号,模拟雷达对目标的探测和跟踪的过程。
其主要原理是以真实的目标信息为基础,通过计算机算法和数字信号处理技术,生成与之相匹配的虚拟回波信号。
这些信号可以反映出不同目标的特性,如目标的速度、位置、形状等。
二、系统结构雷达回波模拟器系统主要由以下几个模块组成:1. 数据库模块:用于存储和管理各类雷达回波信号数据,包括目标特性、距离、速度、形状等数据。
2. 参数设置模块:提供用户界面,用于设置模拟器系统的参数,包括目标参数、雷达参数、环境参数等。
3. 目标生成模块:根据用户设定的目标参数,生成合成的虚拟目标回波信号。
4. 信道模拟模块:模拟雷达与目标之间的信号传播过程和环境对信号的影响,如衰减、多径效应等。
5. 雷达接收机模块:接收和处理经信道模拟后的回波信号,包括滤波、解调等。
6. 显示与分析模块:将处理后的回波信号以图形化的方式显示出来,并提供相应的分析工具,如波形分析、频谱分析等。
三、软硬件实现1. 系统硬件实现:系统硬件主要由计算机、数字信号处理器(DSP)、模拟前端电路、显示设备等组成。
计算机作为系统的主控制单元,负责整个系统的运行和控制。
DSP负责对目标回波信号进行数字信号处理,包括滤波、解调等。
模拟前端电路实现了雷达接收机的模拟电路功能,将接收到的回波信号转换为数字信号。
显示设备用于将处理后的回波信号以图形化的方式显示出来。
2. 系统软件实现:系统软件主要分为控制软件和信号处理软件两部分。
控制软件运行在计算机上,通过用户界面与用户进行交互,实现参数设置、数据管理、系统控制等功能。
信号处理软件则运行在DSP 上,负责对目标回波信号进行数字信号处理,生成合成的虚拟回波信号。
雷达对抗模拟器技术和发展
年代 初 。6 0年代 末期 , 达 辐射 源 模 拟 器 能产 生 逼 雷 真 的雷 达信 号 , 有可 控 的天线 扫 描方 向 图 、 冲序 具 脉 列 和射频 传输 特 性 , 辐 射 源模 拟 器 具 有 数 字 化 可 单 程控 能力 , 不仅 能够 程控 模拟 信 号 , 且还 研制 产 它 而 生 了在通 用 计 算 机 控 制 下 模 拟 几 个 辐 射 源 的模 拟 器, 能提 供 多个 动 态 模 拟 信 号 。2 0世 纪 7 0年代 中
展 中发 挥更 大作 用 。
1 雷达 对 抗 模 拟 器 的发 展
实用 的雷达 对抗 模拟 器 的研 究 始 于 2 0世 纪 6 0
与评估 ; 在靶场验收阶段 , 运用 电子战环境模拟器产 生的复杂逼真的信号环境 , 以对雷达侦察设备进 可 行 性 能评估 与鉴 定 试 验 ; 以 电子 战 电磁 环 境 模 拟 而
收 稿 日期 :0 80 -2 20 -6 0 修 订 日期 :0 8 73 2 0 - —1 0
Ab t a t h oe o lcr n c waf r d lt r n t s ,e p r n ,ef ci e e se a u t n, x r ie sr c :T e r l f e to i e ra emo u ao e t x e i t f t n s v l ai i me e v o e ecs
Te hn que a d De eo m e fElc r ni a f r c i n v lp nto e t o c W r a e Mo dul t r Abr a ao o d
L N Z ojn ,A i — S IH l I a — T O J ny ,H a u a i
雷达信号模拟器方案设计报告

1总体技术方案1.1总体设计概述雷达信号环境模拟器能够产生各种类型的雷达辐射信号,为XX电子侦察设备的鉴定试验,产生所要求的各种类型的雷达辐射信号,构建既定的复杂雷达信号的电磁环境,以便准确评估雷达侦察设备的技术战术指标和效能。
雷达信号环境模拟器在系统中的地位和作用如下图所示:图4.1-1 设备在系统中的地位和作用测评系统主要由被试的雷达侦察设备、雷达信号环境模拟器(5个频段构成)、评测系统软件等设备组成。
1.2总体设计方案雷达信号环境模拟器的总体组成框图如下图所示:辐射源数据库用于存储各种雷达和平台的参数(包括真实雷达和虚拟雷达),通过主控计算机进行读取,辐射源数据可以进行添加、修改和删除等操作。
主控计算机是人机交互的平台,主要完成试验场景描述、试验过程的管理和试验工作状态和参数记录等。
试验场景描述首先进行需要模拟的雷达的数量、位置的设定,然后从雷达辐射源库中选取雷达参数,对每部雷达的类型、天线扫描方式、扫描周期、扫描速度、雷达信号的射频频率、脉冲宽度、脉冲重复周期PRI 变化类型等进行配置。
主控计算机根据设置的每部雷达的参数,将需要模拟的雷达动态分配给1~5个雷达信号模拟器中的一个,再利用通信接口将相应的雷达参数发送到对应频段的雷达信号模拟器。
各频段的雷达信号模拟器内置的控制DSP ,根据主控计算机传送的雷达信号数量和雷达信号参数数据,按照每部雷达各自的脉冲时序,生成对应的时序控制信号,分配给每个雷达中频信号产生器,产生所需要的雷达中频信号波形数据和中频信号。
控制DSP 根据雷达工作频段,控制信号各波段射频模块进行变频和放大,通过天线辐射出去。
各频段的雷达信号模拟器配置有位置和授时接口,用于接收载车提供的GPS/北斗位置和授时信息。
在试验过程中记录各频段雷达信号模拟器的当前位置信息,并且以授时时间作为时间基准,按照场景设定的时间要求模拟产生雷达信号,并且为雷达信号模拟器的信号参数记录打上时间标志。
12第六章ARPA-2功能-大连海事大学选修课-雷达与雷达模拟器
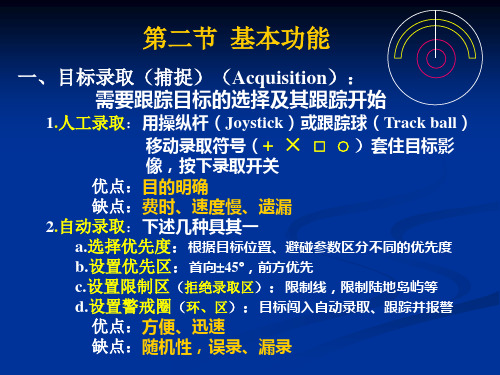
第二节 基本功能
B.用矢量试操纵: 启动试操纵功能;屏上显示“T”字;建立最小CPA 圈;选择相对矢量显示;延长矢量时间;改向或变速; 如果相对矢量延长线离开最小CPA圈,说明安全,读 取避让安全航向或航速;退出(关闭)试操纵功能。 (要车或舵) C.注意事项: a.由于误差,显示的态势与实际情况有差别,不可过 分依赖 b.仅对已跟踪目标有效,模拟航向速度应考虑避碰规则 c.得出最佳措施后,要考虑船舶操纵性能及完成动作所 需时间,此操纵在航行实践中是否可行(航道情况、 航路规则等) d.模拟图像的显示在无任何动作时只保留30s,自动返 回(取消)
第二节 基本功能
五、尾迹(Trails):
用具有一定时间间隔的光点来表示被跟踪目标的历史位置 1.种类: a.真运动尾迹:被跟踪目标沿真航向的历史位置 b.相对运动尾迹:被跟踪目标沿相对航向的历史位置 2.特点 : a.真尾迹的直弯说明目标是否转向,疏密说明速度变化 b.相对尾迹的弯曲、疏密变化并不意味着目标过去转向 和变速,因本船改向变速也能引起目标相对尾迹的变化 3.用途 : a.识别目标有无机动。本船避让操作以后,未达到预期 效果,用真尾迹检验目标船是否采取了不协调的动作 b.检查ARPA的跟踪能力。 尾迹不规则,或显示目标运动不稳定时,说明目标跟踪 电路工作有问题,这时的数据要谨慎对待
C.用途:
a. 避让决策:输入对水速度,不能输入流的数据 b.导航:输入对水速度,还要输入流的数据
第二节 基本功能
三、可能碰撞点(PPC——Points of Possible Collision) (or 潜在碰撞点PCP——Potential Collision Points ) (or 可能截获点PIP——Possible Intercept Points )
雷达观测与标绘和雷达模拟器、ARPA习题集(新题库)w

雷达观测与标绘和雷达模拟器一.判断题:1.船用雷达都是多普勒雷达。
2.船用雷达绝大多数是脉冲雷达。
3.船用雷达利用测量电磁波在天线与目标之问的往返时间来测距的。
4.船用雷达测距原理是测量电磁波在天线与目标之间的频率变化。
5.雷达发射机产生的射频脉冲功率大,频率非常高。
6.磁控管振荡产生周期性大功率的射频脉冲。
7.磁控管振荡产生周期性大功率的调制脉冲。
8.雷达接收机绝大多数都采用超外差式接收机。
9.雷达接收机都采用直放式接收机。
10.雷达电源都采用中频电源,频率范围在400-2000HZ之间。
1 1.雷达电源均采用中频电源,其频率在400—2000HZ之间变化。
12.雷达电源要稳定,一般要求在船电变化4-20%的情况下,中频电压输出变化应小于±5%。
1 3、雷达定时器产生周期性的射频脉冲,控制雷达的同步工作。
14.触发脉冲通过延时线延时,可以消除发射和扫描不同步引起的测距误差。
15.有磁控管电流那么天线上就有电磁波辐射。
16.磁控管上所加的是正向高压调制脉冲。
17.磁控管上所加的是负向高压射频脉冲。
18.实际操作中,我们通常依据是否有晶体电流来判断发射机工作是否正常。
19.一般说来,磁控管电流正常,则雷达发射机工作正常。
20.三分钟自动延时电路的作用是保护磁控管。
21.为了延长调制管的寿命,应在更换新管时对其进行老练。
22.雷达发射脉冲的持续时间取决于调制脉冲的宽度。
23.园极化天线可以有效抑制同频干扰。
24.园极化天线只在雨雪天时使用。
25.收发开关的作用是防止发射的大功率脉冲进入接收机,而使接收的微弱的回波信号进入发射机。
26.船用雷达天线是定向天线。
27.发现混频晶体连续烧坏,首先应检查收发开关。
28.由于波导内表面光洁度高,波导的变形并不会影响电磁波的传输。
29.雷达本机振荡器使用的元件有可能是微波混频晶体三极管。
30.雷达接收机中混频器输出的信号是中频信号。
31.混频晶体比较脆弱,为防高频辐射应放在屏蔽的锚管中保管。
雷达模拟器简介

航海雷达模拟器实验室是我校航海技术专业重点实验室,主要设备为英国船商公司(Transas)的NTPRO 4000型雷达模拟器、操舵模拟器和NAvi-3000型ECDIS系统,系统的性能指标完全满足STCW公约马尼拉修正案对雷达/ARPA模拟器的要求;满足我国交通部海事局颁布的《船员雷达观测与标绘和雷达模拟器专业培训纲要》与《船员自动雷达标绘仪教学培训纲要》相关要求。
本系统由教练站、4个主本船5个单元组成。
各本船均配置有船舶操控系统、电子海图系统、航海仪器系统、3D视景系统、船舶通信系统等。
模拟系统配置有亚洲、欧洲、美洲、澳洲等10个典型训练海区,包括了沿岸水域、狭水道、港口水域、分道通航水域等训练场景。
各训练海区可设置不同的通航环境条件及各种水文气象条件,各个本船可在同一海区进行对抗训练或在不同的海区单独训练。
共有11个训练船模,包括了散货船、化学品船、集装箱船、高速渡船、客船、超级油轮等不同船舶类型。
利用该模拟设备,能开展雷达正确使用训练,又能进行船舶操纵模拟训练、电子海图专项,同时还能进行港航工程船舶操纵模拟试验研究。
《雷达操作与模拟器》课程教学设计探讨
利 用 “ 达 模 拟 器 ” 行 专 业 培 训 是 目前 航 海 院 雷 进
职业技能 、 较好 英 文水 平 和敬 业 精 神 的 高素 质 技 能 型 专门人才” ,具 体 到 航 海 技 术 专 业 学 生 的 培 养 目标 是 确 保 培 养 符 合 国 内外 航 运 企 业 要 求 的 合 格 的 甲/ 类 丙
20 0 9年 9月
浙 江 国际 海 运 职 业 技 术 学 院 学 报
J OURNAL OF ZH ̄ I ANG N I TERNA 兀ONAL MARI ME TI COL GE LE
Sp 20 e.09 Vo . No3 1 5 .
第5卷
第 3期
《 雷达操作与模拟器》 课程教学设计探讨
ta h n a s a d h p e e t i ain f t e e c i g n a s s me t f t e o re e c i g me n , n t e r s n st t o h ta h n a d s e s n o h c u s Ra a Op r t n n u o dr ea i a d o S muao n c le e . ov e p o l m a h r d ae n n v g to a o a in lc l g a e lw r cia i lt ri ol g s To s le t r be t tt e ga u ts i a iain lv c t a ol e h v o p a tc l h h o e a ii tp e e t h s p p r p t o wad t e ta h n e in p a ih t k s te su e t s p i cp lp r a d bl y a r s n,t i a e u sfr r h e c i g d sg ln wh c a e h td n s a rn ia a t n t a c r swi h e n so de a iain c o d t t e d ma d fmo m n v g to . h K e r s:Ra a e ain a d Smu ao ;v c to a d c t n ta h n e in y wo d d rOp rto n i lt r o ain le u a i ; e c ig d sg . o
雷达目标模拟器关键技术
常见于搭配 P CI 总线。这主要是结合其 自身在 扩 展 性 的优 势 上 进 行 的 描述 , 这 种 价 格 不 仅 契
合 了现 代 模 拟 器 的通 用 性 要 求 , 还 能 将 雷 达 目 标 模 拟 器 的性 能 得 到 更 合 理 地 兼 容 处 理 。这 也
多数 的关注 。在多通道的 目标实现上 ,阵 列雷
优异 的散热 性能与可 靠性 的 C P C I 总线基础 的 搭 配 使 得 也 成 为 在 雷 达 目标 模 拟 器 的领 域 拥 有
一
通过对 已有外界 的测试 型号来进 行通道之间的 幅度调频差异来获取通道 的补偿 ,从而确保特 定环境 下的校 正精度 得到修正。这种并不依赖 于外部测试信 号的数据方法获得 了理论上的认 可 ,而算法实现上,则表现 出更为 困难 的劣势 。 因此 ,要 注 定 算 法 实 现 的 过 程 中 ,来 弥 补 误 差 ,
达 通 过 时钟 设 计 来 关 联 同 步 控 制 ,并 保 证 现 有 的板 卡 控 制 与 同 步 影 响 的 时 钟 芯 片 匹配 , 时钟
先 进 的 雷 达 是 衡 量 一 个 国 家 国 防 实 力 的
重要指标 。 雷 达 的 研 制 不 同于 通 信 技 术 的探 索 。
是 其 广 泛 处理 的 结 果 。 2 . 2 D S P 与C P C I 的 雷 达 目标模 拟 器
及 高 性 能 的发 展 过 渡 到 的 中频 雷达 目标模 拟 器 上 ,其 关 键 技 术 也 应 该 围绕 在 这样 的 基础 要 求 上进行展开 。
声呐 的表现上 ,对空域铝箔 的控制 和波束形成 更为精准 的探测 目标 ,以此 获得更多的探测信
息 。这 在 当 时 是 被用 于 军 事 领 域 的 。但 是 区别 于 此 的 同 时 ,在 调整 阵 元 型 号 的 相 位 叠 加 过 程 中 , 能够 降低 副 瓣 而 达 到 其 军 事 目标 。 当然 也 会 对 现 有 的方 向进 行 调 整 。
雷达模拟器工作原理
雷达模拟器工作原理雷达模拟器是一种用于模拟雷达工作原理的设备,它能够在不需要实际雷达设备的情况下,通过软件模拟雷达信号的发射和接收过程。
在航空航天、军事、气象等领域,雷达模拟器被广泛应用于系统设计、性能评估和培训等方面。
雷达模拟器的工作原理可以简单地描述为以下几个步骤:发射信号、接收反射信号、处理信号和显示结果。
首先,雷达模拟器会发射一束电磁波信号,这个信号可以是射频信号、微波信号或者其他频段的信号。
发射信号的方式可以是脉冲式、连续波式或者其他方式。
发射的信号会遇到目标物体,并被目标物体反射回来,形成反射信号。
这个反射信号会被雷达模拟器的接收系统接收到。
接收系统通常由天线、前端接收器和信号处理器组成。
天线用于接收反射信号并将其转换成电信号,前端接收器负责放大接收到的信号,信号处理器用于对接收到的信号进行处理。
在信号处理阶段,雷达模拟器会对接收到的信号进行滤波、放大、去噪等处理,以提取出目标物体的信息。
处理后的信号可以包括目标物体的位置、速度、距离等信息。
这些信息可以用来评估雷达系统的性能,比如探测距离、分辨率、抗干扰性能等。
雷达模拟器会将处理后的结果显示出来。
显示方式可以是数字显示、图形显示或者其他方式。
显示结果可以反映目标物体的位置、运动轨迹、散射截面等信息。
通过对显示结果的观察和分析,可以评估雷达系统的性能,并进行改进和优化。
除了上述的基本工作原理,雷达模拟器还可以具备一些高级功能,比如多目标模拟、多波束模拟、干扰模拟等。
多目标模拟可以模拟多个目标物体出现在雷达覆盖区域内的情况,以评估雷达系统的多目标跟踪能力。
多波束模拟可以模拟雷达系统具备多个波束,以评估雷达系统的覆盖范围和分辨率。
干扰模拟可以模拟雷达系统受到干扰的情况,以评估雷达系统的抗干扰能力。
雷达模拟器是一种用于模拟雷达工作原理的设备,它能够通过软件模拟雷达信号的发射和接收过程。
通过对模拟结果的观察和分析,可以评估雷达系统的性能,并进行改进和优化。
雷达目标模拟器(1)
人机交互 控制机
I路
计算系统调 制函数 Q路
雷达发射 信号
I路 卷积
Q路
D/A+LPF
视频输出
射频输出
上变频
目录
雷达目标模拟器
一、雷达原理简述 二、雷达目标模拟器模拟信号形式 三、雷达模拟器的实现技术 四、SAR雷达目标模拟器回波信号举例
四、SAR雷达目标模拟器回波信号举例
早期雷达
现代雷达
“无线电探测与测距” “无线电探测、定位、测轨和识别”
普通测距雷达,目标静止时发射信号和回波的时间间隔
r c
2
实际加入噪声的回波:
实现了雷达测距
二、雷达目标模拟器模拟信号形式:发射信号形式LFM
早期雷达: 脉冲信号
现代雷达: LFM
时宽 带宽
1
tB
发射功率 距离分辨率
r
c 2B
时宽和带宽的矛盾
PRT
s(t) a(t) exp[ j(2fct K rt 2 )]
雷达目标模拟器
高鑫 2010-1-15
目录
雷达目标模拟器
一、雷达原理简述 二、雷达目标模拟器模拟信号形式 三、雷达模拟器的实现技术 四、SAR雷达目标模拟器回波信号举例
一、雷达原理简述
雷达: 利用目标对电磁波的反射(或称为二次散射)现 象来发现目标并测定其位置的装置。 ——发射信号
——散射 ——接收目标散射回波
系统参数
回波数据
回波数据
模拟数据
RF信号
人机交互 计算机软件 硬盘 高速总线 D/A+LPF 上变频
3.微机+模拟器DSP组合 数字信号处理(DSP)芯片由于具有特殊的结构、高效的计算能力 已经在雷达领域得到广泛的应用。绝大部分雷达信号模拟器采 用“微机+模拟器DSP组合”方案,信号模拟过程分为数据库产 生、数据传输、数据实时再处理以及数据输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Pr min——接收机门限功率
0——物标有效散射面积(雷达截面积)
2、雷达最大探测范围:标准大气压下,雷达波正常折射 雷达可以探测到的最大距离。
计算公式
R max = 2.23( h1 + h2 ) (n mile)
h1
Antenna radar horizon Target radar horizon
显示器要求。
V 几十V
6、显示器:平面位置显示器(PPI)。显示与测量目标,目标 回波按目标的实际距离和方位显示在荧光屏上; 且配有测量系统供随时测量。
7、雷达电源:把船电变成雷达所需的中频交流电。 400 ~ 2000 Hz
二、船用雷达单元构成:
1、三单元雷达: 收发机(触发电路、发射机、接收机、收发开关) 显示器、天线、中频电源
六、测方位精度
1、影响因素
水平波束宽度 方位同步系统误差 船首标志线的宽度和精度 方位测量设备的误差 船舶摇摆倾斜导致的误差 光点尺寸;视差;罗经航向误差
2、性能标准要求
测量位于屏边缘的目标回波,误差不能超过1; 船首线误差不能超过1;船首线宽度不大于0.5
第五节 雷达假回波
一、间接反射假回波
船上或陆地上的强反射体做为二次辐射源, 在荧屏上形成的假回波
周期T (=1/F)> 根据量程需要选择时间基准 随量程改变:近量程,高F;远量程,低F
4、发射功率:指峰值功率,一般3~75 kW
1)峰值功率 Pt: 在脉冲持续时间内的平均功率
2)平均功率 Pm: 一个脉冲重复周期内输出功率的平均值
3)二者关系 p =p t m tT
R max
p↑→
杂波
A
B
光真 点实 半目 径标
脉有 光 冲限 点 宽通 半 度频 径
带 失 真
距离分辨力
四、方位分辨力: 雷达分辨同一距离相邻两目标的能力
H
H
五、测距精度
1、影响因素
同步误差 固标和活标不准确 光点尺寸 目标回波闪烁
2、性能标准要求
固标圈和活标圈测量,误差不能超过所用量程的1.5% 或70 m二者之大者
送:1)发射机:控制发射开始 2)接收机:控制近距离增益 3)显示器:控制计时开始
2、发射机:在触发脉冲控制下产生周期性的大功率射频脉冲 ——微波脉冲、发射脉冲、雷达波
3、收发开关:
发射时,关闭接收机,大功率射频脉冲送天线; 接收时,接通接收机,微弱回波能量送接收机。
4、天线:定向收发天线,将发射机送来的射频脉冲聚成细束 集中向一个方向发射,并接收此方向物标反射回来 的雷达波(回波)送接收机。
二、多次反射假回波 雷达波在本船与目标之间来 回多次反射均被接收引起的
三、多次反射假回波
四、二次扫描假回波
(a) Multiple reflection
A BC
(b) Radar picture
第六节 雷达干扰杂波
一、海浪干扰 二、雨雪干扰
Target
Sea clutter
Target lost
按工作频段分类 米波雷达 分米波雷达 厘米波雷达 毫米波雷达
按雷达位置分类 地面雷达 机载雷达 舰载雷达 导弹载雷达 航天雷达 气球载雷达
按天线扫描方式分类 机械扫描雷达 机电扫描雷达 频扫雷达 相控阵雷达
按信号形式分类 脉冲雷达 连续波雷达
脉冲压缩雷达
四、航海雷达的用途
航海雷达特点: 厘米波长(3厘米,10厘米) 微波脉冲发射
二. 雷达测方位原理
1、利用收发定向天线 ,只向一个方向发射雷达波且 只接收此方向上的目标的反射回波
2、天线旋转依次向四周发射雷达波,则可探知周围 物标的方位——天线的方向即目标的方向
第二节 雷达的基本组成、作用
一、基本组成及作用:
1、定时器(触发电路、同步电路等):
是雷达的指挥中心,产生周期性的窄脉冲——触发脉冲
天气好: X band; 天气坏(雨/雪) : S band
2、脉冲宽度(τ):发射脉冲的持续时间 一般τ= 0.04 ~ 1.2μs
随量程改变:近量程,窄脉冲;远量程,宽脉冲
τ↑→Rmax↑
τ↓→
距离分辨力 海浪/雨雪 杂波
盲区
3、脉冲重复频率(F):每秒钟发射的脉冲数 500 ~ 4 000 Hz
散射
电磁波特性: 绕射
吸收
目标:雷达探测到 的回波
• 船舶 • 岛屿(陆地) • 浮标 • 海浪杂波 • 雨雪、云雾杂波
目标信息:距离、方位 航速、航向
其他避碰信息
二、雷达技术的发展
1886-1888 Hertz(Germany): 实现了电磁波振荡,发射,接收。
• 1914 (American): 回声探测器-雷达的初始模型。 • Marconi(Italy): 提出一个可实践的雷达系统。 • 1930 Blair: 脉冲回波测量(距离,方向)系统,基本雷达. • RCA Co.(American): 发明了机载雷达。 • (America): “New York” 巡洋舰首先安装舰载雷达。 • After WWII 成为了发展快速的导航仪器。 • 中国:主要从发达国家引进技术。 • 现代雷达/ARPA: 与GNSS、 ECDIS、自动舵手以及其他驾
MARINE RADAR
&
RADAR SIMULATOR
第一章 雷达基本工作原理
引言
一、 基本概念 “雷达”译自英文词汇—— RadaRr adar—— Radio detection and ranging —— 无线电探测和测距
定义:雷达是一种通过发射电磁波和接收目标反射回 波,对目标进行探测和测定目标信息的设备
Geometric horizon 1.93 Optical horizon 2.07 Radar horizon 2.23
h2
radar horizon and maximum detectable target range
3、影响因素
1、技术指标 2、目标反射特性 3、海面反射 4、外界杂波干扰 5、大气传播衰减
STC increased
Target remain normal
Sea clutter gets weak
Targets get weak
Target Reappeared
STC effect
三、同频干扰
第二章 雷达模拟器
在实验室模拟船舶在海上航行环境,训练正 确运用雷达进行航行定位、导航和避碰。
A
Real
A echo
VRM
Indirect
A` echo
A Indirecndirect echo due to funnel reflection (b) Indirect echo due to other reflection Indirect echo
11、其它:
动态范围、工作稳定性、抗干扰性能、恢复时间等
第四节 雷达的基本使用特性
一、最大作用距离
雷达荧光屏上目标清楚可见的最远距离 雷达探测远距离目标的能力
最大作用距离:取以下二者小者 1、雷达方程:雷达波在自由空间传播
\
r = ( ) max
Pt GA2 2σo
64π 3Pr min
1 4
Pt——雷达峰值功率 GA——天线增益
最小作用距离:取以下二者大者
1、雷达脉冲宽度t及收发开关恢复时间tr:
rmin1 =
C 2
(
t
+
t
r
)
2、雷达天线垂直波束照射角度v:
rmin2 = h1ctg
v
2
rmin1
…………
v
Half power line
Zero power line
rmin2
target range affected by VBW
触发器
天线
方位与 船首线
收发机 回波
显示器
ARPA
Fig1-2(1)
微波传输线 发射脉冲
发射机
T/R 触发器
天线 回波
接收机
电源
船电
显示器
Fig1-2 (2)
回波 船首线 方位
T/R
Receiver
Transmitter
第二节 雷达的基本组成、作用
5、接收机:超外差式,将微弱回波信号放大千万倍以符合
三个主要用途:
尽早发现目标
(1) 远距离探测
(2) 无视线限制
测量目标参数
距离,方位,速度,航向,……
导航
(1) 避碰
(2) 定位
雷达/ARPA, ECDIS, GNSS/DGNSS和自动舵 构成的自动船桥系统是未来主要的导航系统
第一节 雷达测距与测方位原理
岛屿
本船
90°
245° 岛屿
2、二单元雷达: 天线收发机、显示器、中频电源
第三节 雷达的基本技术指标
1、工作频率(波长) :超高频(正弦波)的频率范围
即船用雷达 磁控管工作频率
S 波段:λ=10 cm; f=2 900~3 100 MHz 如:3 050 MHz X波段 : λ=3 cm; f=9 000~9 500 MHz 如:9 375 MHz
3、影响因素
1、技术指标: 2、天线高度: 3、目标反射特性:
4、性能标准要求
天线高15 m,对于5 000总吨的船舶、10 m长的小船 及有效散射面积10 m2的导航浮筒,不动除量程外的 任何控钮开关,应在50米到1 n mile清楚显示。
三、距离分辨力: 雷达分辨同一方位相邻两目标的能力
距离分辨力
2)垂直波束宽度 V: 20 左右
R
船摇时不至于丢失目标及减小盲区不宜 太小;保持波束一定辐射强度不宜太大