机械CAD实验资料
机械CADCAM 实验指导书
参数一致。空字符串 ("") 表示从键盘键入 ENTER 键。不带参数调用 command 相当于键
入 ESC 键,这样可取消大多数 AutoCAD 命令。
command 函数将每一个参数顺序传给 AutoCAD 以响应提示。它以字符串形式提交命
令名和选项;以两个实数组成的表的形式提交二维点;以三个实数组成的表的形式提交三维
如下命令:vlisp 首次启动 VLISP 时,它将显示如下屏幕:
VLISP 屏幕包括如下区域: ⊙ 菜单
1
用户可以通过选取各个菜单项来发出 VLISP 命令。如果您亮显菜单上的某一个菜单 项,VLISP 将在屏幕底部的状态栏上显示相关命令功能的简介。 ⊙ 工具栏
单击工具栏按钮可以快速发出 VLISP 命令。VLISP 中一共有五个工具栏:标准、视图、 调试、工具和搜索,各自代表不同功能的 VLISP 命令组。(在本页的图中,五个工具栏衔
drawline 函数:
二、AutoLISP 基本函数
在此,对 AutoLISP 函数语法的描述遵循如下惯例:
在本样例中,函数 foo 有一个必要参数 string 和一个可选参数 number。还可以提供
机械CADCAM实验报告
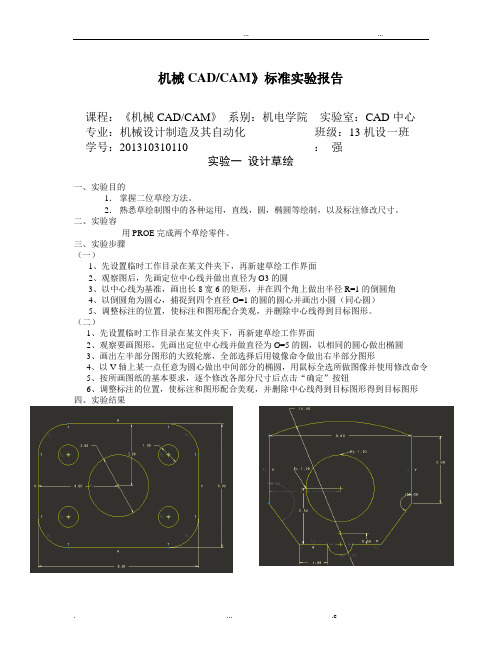
机械CAD/CAM》标准实验报告课程:《机械CAD/CAM》系别:机电学院实验室:CAD中心专业:机械设计制造及其自动化班级:13机设一班学号:201310310110 :强实验一设计草绘一、实验目的1.掌握二位草绘方法。
2.熟悉草绘制图中的各种运用,直线,圆,椭圆等绘制,以及标注修改尺寸。
二、实验容用PROE完成两个草绘零件。
三、实验步骤(一)1、先设置临时工作目录在某文件夹下,再新建草绘工作界面2、观察图后,先画定位中心线并做出直径为Ø3的圆3、以中心线为基准,画出长8宽6的矩形,并在四个角上做出半径R=1的倒圆角4、以倒圆角为圆心,捕捉到四个直径Ø=1的圆的圆心并画出小圆(同心圆)5、调整标注的位置,使标注和图形配合美观,并删除中心线得到目标图形。
(二)1、先设置临时工作目录在某文件夹下,再新建草绘工作界面2、观察要画图形,先画出定位中心线并做直径为Ø=5的圆,以相同的圆心做出椭圆3、画出左半部分图形的大致轮廓,全部选择后用镜像命令做出右半部分图形4、以V轴上某一点任意为圆心做出中间部分的椭圆,用鼠标全选所做图像并使用修改命令5、按所画图纸的基本要求,逐个修改各部分尺寸后点击“确定”按钮6、调整标注的位置,使标注和图形配合美观,并删除中心线得到目标图形得到目标图形四、实验结果实验二构建三维拉伸实体一、实验目的1、了解和熟悉Pro/ENGINEER野火版;2、掌握Pro/ENGINEER野火版拉伸特征的创建方法和过程;3、掌握Pro/ENGINEER野火版草绘和三维的切换;4、掌握Pro/ENGINEER野火版进行零件设计的方法和步骤。
二、实验容用PROE完成拉伸特征的三维模型图。
三、实验步骤1、先设置临时工作目录在某文件夹下,再新建草绘工作界面2、观察零件图后,选择基准平面。
先画定位中心线并做出矩形(120×120mm),并在四个角分别做出R=12mm的圆角,零件的厚度为18mm3、选择拉伸命令,选择基准平面,画出Ø=90的圆,圆的厚度是5mm4、选择拉伸—剪切命令,选择基准平面,画出Ø=70的圆,圆的剪切厚度是16mm5、选择拉伸—剪切命令,先做出2条中心线,做出Ø=7的圆,圆的厚度剪切到零件底面(即通孔)。
CAD实验一实验报告
实验一零件设计
1、实验目的与要求
1.1熟习软件的建模操作命令的使用。
1.2掌握零件设计功能。
2、设备与器材
2.1 CATIA软件。
2.2 基于Windows 计算机机一台。
3、实验步骤、方法与实验内容
3.1 熟习基准特征:
基准面、基准轴、基准坐标系;体素特征:长方块、圆柱、球、锥、组合体命令(布尔运算)。
熟习基础特征拉伸、旋转、扫描等。
工程特征:孔、凸台、腔体、垫块、沟槽、键槽。
特征操作:实例特征、镜向特征、修剪特征、特征细节、圆角、倒角、抽壳、拔模。
熟习曲面设计。
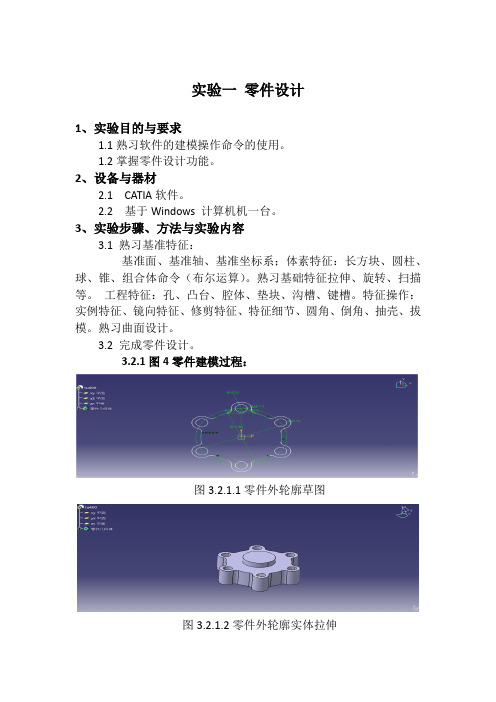
3.2 完成零件设计。
3.2.1图4零件建模过程:
图3.2.1.1零件外轮廓草图
图3.2.1.2零件外轮廓实体拉伸
图3.2.1.3零件中心开键槽3.2.2图5零件建模过程:
图3.2.2.1零件上部建模草图
图3.2.2.2零件上部拉伸实体模型
图3.2.2.3零件下部实体拉伸模型
图3.2.2.4零件下部凹槽草图
图3.2.2.5零件实体图
3.2.3图6建模过程:
图3.2.3.1零件草图
图3.2.3.2零件旋转草图
图3.2.3.3零件旋转实体模型
图3.2.3.4零件左侧通管实体模型
图3.2.3.5零件左侧带盖模型
图3.2.3.6零件上端阵列打孔
图3.2.3.7零件下端阵列打孔
图3.2.3.8零件实体模型。
机械CAD CAM实验指导(第二版) 实验一
(7) 操控板:包含消息区,在创建特征或装配零件时,操 控板位于图形窗口上部的对话栏。
(8) 特征工具栏:将常用的功能以工具按钮的形式集中在 其中,位于屏幕右侧。
(9) 状态栏:显示当前模型中选取的项目数和选择对象时 采用的过滤器类型。
(10) 选择过滤器:通过下拉列表框中的选项可缩小可选 项目类型的范围,轻松定位项目。
图1-7 隐藏线显示模式
(3) 无隐藏线显示模式:按下 图1-8所示。
按钮,模型显示效果如
图1-8 无隐藏线显示模式
(4) 着色显示模式:按下 9所示。
按钮,模型显示效果如图1-
图1-9 着色显示模式
6. 基准显示 Pro/E Wildfire中可以显示四种基准,分别是基准平面、 基准轴、基准坐标系和基准点。工具栏所示的按钮 就分别代表这四种基准。 (1) 显示基准平面:按下 按钮,模型显示效果如图 1-10所示。
图1-4 【新建】对话框
4. 打开图形文件
选择【文件】︱【打开】命令,或者单击工具栏中的打
开按钮
,出现如图1-5所示的对话框。在【类型】下拉
列表框中单击下拉按钮,可以从中选择需要打开的文件类型。
选中文件example-1.prt,单击【打开】按钮,即可打开连杆
图形文件。
图1-5 【文件打开】对话框
2) Pro/E Wildfire的组成模块 Pro/E Wildfire是由多个模块组成的大型软件,常用模块 有五个,每个模块都有独立的功能。 (1) 草绘模块:用于绘制和编辑二维平面草图。 (2) 零件设计模块:用于创建三维模型。 (3) 装配模块:可轻松完成零件的虚拟装配。 (4) 曲面模块:用于创建各种类型的曲面特征。 (5) 工程图模块:可以直接由三维实体模型生成二维工程 图。 (6) Pro/E Wildfire的其他模块:包括制造模块、机构仿真 模块、模具设计模块、布线模块、分析模块等。
机械CADCAM实验报告一(样例)
课程名称
机械 CAD/CAM
实验题目
实验一 表面建模
姓名
学号
年级
机械设计
专业名称 制造及其
层次
自动化
开放本科
实验时间
实验成绩
实验教师签字
一、实验目的 通过使用 Pro/E 软件进行表面建模的实践,理解并掌握表面建模的方法 掌握拉伸建模方法与旋转建模方法
二、实验内容与要 求 完成如下
图 3-8 旋转曲面对话框 →单侧→开放终点→完成; →选择前面(FRONT)为绘图平面,选择向屏幕内(即-Z 方向)创建曲面; →选择顶面(TOP)为参考面; →进入草绘环境,绘制如图 3-9 所示的剖面,单击绘图工具条中的√,完成划绘剖面 的绘制;
图 3-9 草绘剖面
图 3-10 旋转曲面特征
→360→完成;
三、实验过程、数 据记录和有关计算
主要绘图步骤如下:
一、 用拉伸(Extrude)方式创建曲面特征 步骤一:创建文件名为 extrude.prt 的新零件。 步骤二:以 Extrude 的方式创建曲面特征。 特征→创建→曲面→拉伸→完成,弹出如图产 3-4 所示曲面拉伸对话框;
图 3-4 曲面拉伸创建拉伸曲面 →单侧→开放→完成; →选择顶面为草绘参考面; →进入草绘环境,绘制如图 3-5 所示的剖面。单击绘图工具条上的√完成草绘剖面的绘 制。
图 3-5 草绘剖面
图 3-6 拉伸曲面特征
步骤三:输入特征的深度,完成拉伸特征创建。
→输入特征深度 50,单击√完成。
→在拉伸特征对话框中确认相关拉伸参数,单击“确定”按钮,完成拉伸特征创建。完
成的特征如图 3-6 所示。
步骤四:以文件名 extrude.prt 存储文件。
机械CAD CAM实验指导(第二版) 实验五

图5-1 拉伸曲面操控板
2) 旋转曲面 旋转曲面是指草绘一个截面后,沿指定的旋转方向以某 一旋转角度绕中心线旋转构成的一类特征。在图形区域的右 侧工具栏上单击 图标,将弹出旋转操控板,如图5-2所示。 在操控板上单击 图标,可选择一个以前绘制的截面。如 果要自己定义一个草绘截面,则需在操控板上单击“放置”, 在定义好截面和旋转角度后,即可旋转出所需要的曲面特征。
实验五 曲面特征建模
一、实验目的 (1) 掌握拉伸、旋转、扫描和平面曲面特征创建的方法; (2) 掌握曲面的编辑方法; (3) 掌握现代计算机辅助设计中,借助计算机工具充分、
直接、及时、形象、不受拘束地表达设计意图的方法。
二、基本知识 1. 曲面特征的创建 1) 拉伸曲面 拉伸曲面是指草绘一个截面后,在垂直于草绘平面的方
图5-3 扫描曲面操控板
4) 平面曲面 平面曲面是指由平整的闭环边界截面(即在某一个平面内 的封闭截面)生成的平整曲面。单击“编辑”→“填充”命令, 系统将在工作区的下方显示填充选项。 2. 曲面特征的编辑 曲面特征的编辑工作主要包括曲面合并、曲面修剪、曲 面延伸、曲面偏移及曲面加厚等。 1) 曲面合并 曲面合并是通过曲面间的操作,将不同的曲面合成为一 张曲面,相当于用曲面进行互相裁切,使之保留合适的曲面。 点击 图标,可选择要合并的面并改变保留曲面的侧边。
三、操作实例 用曲面特征创建如图5-4(a)所示的减速器上齿轮轴零件模
《机械CADCAM》形成性考核一课程实验4曲面建模

《机械CADCAM》形成性考核一课程实
验4曲面建模
机械CADCAM形成性考核一课程实验4曲面建模
实验目标
本实验旨在掌握机械CADCAM课程中的曲面建模技术,通过实践操作提升学生的设计能力和实际应用能力。
实验内容
1. 理解曲面建模的基本概念和原理;
2. 研究曲面建模的常用工具和方法;
3. 实施曲面建模实验,包括以下步骤:
- 根据给定的设计要求,确定曲面建模的具体方法;
- 运用相应的CAD软件进行曲面建模操作;
- 调整曲面参数以达到设计要求;
- 完成曲面建模实验报告。
实验要求
1. 必须独立完成实验,不得寻求他人协助;
2. 实验过程中遵守实验室安全规定,注意操作安全;
3. 实验报告需包括实验目的、实验步骤、关键参数设置、实验结果、心得体会等内容;
4. 实验报告字数不少于800字。
实验评分
本实验将根据实验报告的完整性、实验操作的准确性和实验结果的合理性对学生进行评分。
同时,还将考察学生的独立思考能力和实际操作能力。
参考资料
1. 《机械CADCAM基础教程》;
2. 《机械设计与制造基础》。
---
注意:本内容仅供参考,具体实验要求以教师布置和课程大纲为准。
机械cad技术基础实验报告
机械cad技术基础实验报告机械CAD技术基础实验报告摘要:本实验旨在通过对机械CAD技术的基础实验,探讨CAD技术在机械设计中的应用及其重要性。
实验结果表明,CAD技术可以大大提高机械设计的效率和精度,为机械工程领域的发展做出了重要贡献。
1. 实验目的本实验旨在通过对机械CAD技术的基础实验,探讨CAD技术在机械设计中的应用及其重要性,加深学生对CAD技术的理解和应用能力。
2. 实验内容本实验主要包括以下内容:1)CAD软件的基本操作:学习CAD软件的基本操作,包括绘图、编辑、尺寸标注等功能。
2)绘制简单零件:通过CAD软件绘制简单的机械零件,如螺栓、螺母等。
3)组装零件:学习如何使用CAD软件进行零件的组装,包括约束、关系等。
4)生成工程图:学习如何生成零件的工程图,包括主视图、剖视图、详图等。
3. 实验步骤1)熟悉CAD软件的界面和基本操作。
2)绘制简单零件:如螺栓、螺母等。
3)进行零件的组装,学习约束和关系的应用。
4)生成零件的工程图,包括主视图、剖视图、详图等。
4. 实验结果通过本次实验,我们对CAD技术有了更深入的了解。
CAD技术可以大大提高机械设计的效率和精度,使得设计师可以更加方便地进行设计和修改,大大缩短了设计周期。
同时,CAD技术还可以为机械工程领域的发展做出更大的贡献,提高了机械产品的质量和性能。
5. 结论通过本次实验,我们深刻认识到CAD技术在机械设计中的重要性。
CAD技术不仅可以提高设计效率和精度,还可以为机械工程领域的发展做出重要贡献。
因此,我们应该更加深入地学习和应用CAD技术,为我国机械工程的发展做出更大的贡献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械CAD/CAM课程及实验报告实验课程机械CAD/CAM学院名称核技术与自动化工程学院专业名称机械工程及自动化专业学生姓名古安宁学生学号201206040115指导教师龚迪琛实验地点金工基地实验室实验成绩二〇15年1月二〇15年 1月填写说明1、适用于本科生所有的实验报告(印制实验报告册除外);2、专业填写为专业全称,有专业方向的用小括号标明;3、格式要求:①用A4纸双面打印(封面双面打印)或在A4大小纸上用蓝黑色水笔书写。
②打印排版:正文用宋体小四号,1.5倍行距,页边距采取默认形式(上下2.54cm,左右2.54cm,页眉1.5cm,页脚1.75cm)。
字符间距为默认值(缩放100%,间距:标准);页码用小五号字底端居中。
③具体要求:题目(二号黑体居中);摘要(“摘要”二字用小二号黑体居中,隔行书写摘要的文字部分,小4号宋体);关键词(隔行顶格书写“关键词”三字,提炼3-5个关键词,用分号隔开,小4号黑体);正文部分采用三级标题;第1章××(小二号黑体居中,段前0.5行)1.1 ×××××小三号黑体×××××(段前、段后0.5行)1.1.1小四号黑体(段前、段后0.5行)参考文献(黑体小二号居中,段前0.5行),参考文献用五号宋体,参照《参考文献著录规则(GB/T 7714-2005)》。
第1章曲面建模及凸轮机构的仿真1.1实验目的掌握利用pro/E进行一般曲面建模的方法,掌握利用曲面组合进行设计的方法,理解建模过程中出现错误以后的修改和处理的方法。
1.2实验环境Proe5.0和Maple1.3实验过程1.3.1曲面建模设计新建零件,在TOP基准面上,绘制两个椭圆,保留其中的部分,大椭圆长轴Rx=200mm,短轴Ry=100mm。
小椭圆长轴Rx=65mm,短轴Ry=30mm。
如下图1-1所示:图1-1 早期草绘图按照视频步骤,完成曲面建模,但依然存在接缝处不光滑,所以要进行特征的修改和出错处理,如下图1-2,最后,完成曲面建模,如下图1-3所示,图1-3 曲面成型图1.3.2齿轮-凸轮机构的仿真及计算组装已有的零件图,装配图如下图1-4所示:图1-4 齿轮-凸轮结构装配图ω,自定义测量位置(主动轮回转中心和圆并设置主动轴回转速度s/115=心连线和水平线的角度)为30°。
对机构进行运动仿真,并测得机构处在测量位置时的数据如下图1-5所示,图1-5 机构动态测试数据图1-6 测试结果小齿轮转动的角速度-53.514230度/秒,小齿轮转动的角加速度115.824108度/(秒*秒),顶杆的速度356.913398 毫米/秒,顶杆的加速度 275.158434 毫米/(秒*秒)。
齿轮-凸轮机构的理论计算如下:测得基本尺寸,大轮直径D=300mm,小轮直径d=150mm,凸轮啮合连杆机构运动分析简图如下图1-6所示,D轮与C轮作啮合运动,与D轮铰接的DE杆被约束在垂直交于O的铅锤滑道内运动。
当OC与垂线交角为φ=45°时,理论计算:(1)该瞬时DE杆的速度和加速度;(2)D轮的角速度和角加速度;图1-7 机构运动分析图计算过程如下:解:sin sin2cos2cos(90)2cos233cos3cos3cosd=r r dtβθθθλθβθωβββ--===两边求导:2cos2cos;3cos3cosCD CDCD CDθθωωωωωωωωωωββ=-=+=-=+大相对小相对小小2cos1cos3cos2(1)2cos2cos3cosCDCDθωωωθβωωθωβωωβ+-==⇒=-++大相对小小相对小2223cos sin cos 2cos sin [2(1)]2[]cos cos 3cos d dt θθβθβαωωβββ=-+=--小角加速度: Maple 求解:0.78539750000.49088267810.7853975162.1609652求解过程截图,如图1-7所示,图1-8 计算过程截图1.4实验总结曲面建模,通过这个实例,熟悉了曲面绘图的命令,学会了约束、镜像、合并的操作,以及特征修改和出错后的处理,但掌握还不牢固,所以,后面还得加强练习。
凸轮的运动仿真,以前自学过装配,所以装配比较简单,仿真测数据不是很了解,通过此次实验也有所了解了,在测试顶杆的数据时,我采用的是测试顶杆上的某一点的速度和加速度来测量的。
理论计算部分,原理是弄懂了的,但就是利用Maple软件计算证明还没学会使用。
第2章点和直线的透视投影的Proe验证2.1实验目的掌握空间任一点的透视投影矩阵的建立方法,掌握空间一条直线的灭点的求解方法,理解透视投影矩阵对空间某点运算的理论依据和计算过程,通过倾斜透视投影中空间点的平移与旋转变换的计算方法理解不同坐标系下的透视投影转换的方法,并结合Pro/E软件和Matlab进行理论计算和实际测量的验证。
2.2实验步骤2.2.1点的透视投影利用Pro/E画一个长宽高均为115mm的立方体,立方体放在top基准面上。
作与立方体某一侧面平行,且垂直于top基准面的透视投影平面,该透视投影平面与立方体侧面的距离为56mm。
作视点E,距离透视投影平面为2mm。
将立方体旋转30度,将视点和立方体的上角点连线,求出该连线与透视投影平面的交点在透视坐标系的坐标为(1.72,1.99),如下图2-1所示:图2-1 点的透视坐标图通过透视投影矩阵理论计算交点的坐标,在matlab中进行理论计算,如下图2-2所示:图2-2 计算过程图验证可得,数据相符,即以上透影操作正确。
2.2.2直线的透视投影作前面的立方体的对角线,通过视点E作对角线的平行线,该平行线与透视投影平面的交点,测量此交点在透视坐标系的坐标为(0.54,1.46),如下图2-3所示,图2-3 灭点透视投影图通过透视投影矩阵理论计算交点的坐标,Matlab计算过程如下图2-4所示:图2-4 计算过程截图结果表明,Matlab理论计算结果与proe的透视投影坐标完全一致。
2.3实验总结通过此次实验,又重新复习了线性代数中矩阵计算的部分,其实只要明白原理再加上一点基础的Matlab知识就可以进行实验数据的验证。
点和直线的透影其实可以类比的,所以只要弄懂了点的透影就自然懂了直线或灭点的透影。
正常的投影和倾斜的投影其实也差不多,就是倾斜的投影还要乘以角度的余弦值。
第3章主控设计3.1实验要求将倒钩特征进行修改,使其能体现实物的正常工作。
3.2实验步骤对倒钩的尺寸大小进行修改,如下图3-1所示,图3-1 尺寸修改图然而,修改后倒钩仍不能正确的配合,删掉原有的出版几何尺寸以及复制几何尺寸,如下图3-2所示,图3-2 复制尺寸图新建出版几何尺寸并对另一面复制几何,如下图3-3所示,图3-3 另一面复制几何图实体化去除,观察配合情况,如下图3-4所示,图3-4 实体配合图实体完全配合,证明倒钩修改成功,壳体能够正常工作。
第4章 点在平面内投影矩阵的Pro/E 验证4.1实验目的掌握空间任一平面的投影矩阵的建立方法,理解投影矩阵对空间某点运算的理论依据和计算过程,并结合Pro/E 软件进行理论计算和实际测量的验证。
4.2实验步骤做点)90,80,100(),60,80,100(),0,0,0(210---p p p ,作空间点3p 其坐标(115,115,115),如下图4-1所示:图4-1 坐标确定图通过3p 做平面A 的垂足点CZ ,测量CZ 的三个坐标值X=126.220mm ,Y=115mm ,Z=100.976mm 。
如下图所示:图4-2在平面A上找到两个点B1和B2测量它们的坐标:XB1=( 50.9250)毫米,YB1=( 187.44)毫米,ZB1=( 40.74)毫米XB2=( 8.6125)毫米,YB2=( 162.05)毫米,ZB2=( 6.89)毫米通过B1和B2点构建投影矩阵,在matlab中进行计算在Matlab中进行投影矩阵的详细计算过程和结果填写如下:a1=[50.9250;187.44;40.74]a1 =50.9250187.4440.74>> a2=[8.6125;162.05;6.89a2 =8.6125162.056.89>> A=[a1 a2]A =50.9250 8.6125187.44 162.0540.74 6.89>> Proj=A*inv(A'*A)*A'Proj =0.5136 0.2869 0.00000.5869 0.1864 00 0 1.0000>> PN3=[115;115;115]PN3 =115115115>> Proj*PN3ans =126.6814115.1276101.00004.3实验总结有了前面实验二,这次实验也就简单多了,其实就是一个点的投影,计算很简单,原理也很容易明白。
学生实验心得学生(签名):年月日指导教师评语成绩评定:指导教师(签名):年月日课程心得报告机械CAD/CAM计算机辅助设计与制造(CAD/CAM)技术已经用于研究、开发、制造等方面。
由于这一技术将计算机高速而精确的计算能力、大容量存储和处理数据的能力与人的逻辑判断、综合分析能力以及创造性思维结合起来,从而产生了巨大的威力,应用范围及广,经济效益显著。
目前,在发达国家已经形成了关于计算机辅助设计与制造的研究、开发、制造、销售以及咨询服务的新产业。
本课程的任务是使学生掌握计算机辅助设计与制造(CAD/CAM)技术的基本理论、基本知识和基本技能,学会各种常用的计算机辅助设计与制造(CAD/CAM)技术的基本方法,并具有计算机辅助设计与制造(CAD/CAM)的初步能力。
一开始,老师主要讲的是Pro/E软件,其主要应用于零件建模与运动仿真等等,因为从大二下学期就开始接触这个软件,并且暑假的时候也自学了很多,所以开始的时候学起来很轻松。
但后来讲解的矩阵投影相关的东西,就听起来有点困难,只有在老师讲解之后,下来自己慢慢消化,不懂的就多问问,从最基础的做起。
当然,由于这学期一直在准备大学生工程能力竞赛的事情,学习上的也耽搁了不少,所以后面听老师的课也更加困难了。
但不得不承认,学习毕竟是自己的事。
自己不主动、不学,老师讲得再好,也吸收不进去。
再加上龚老师的教学风格,也更加警惕我们学习得靠自觉。
通过龚老师细心的讲解,实例加视频的演示学习使我们从理论学习转到了实际应用,同时我们对一些简单的机械零件的加工也有了一些感性的认识。
并对一些较为复杂的曲面和平面更为熟悉,掌握了pro/E曲面建模过程中的特征修改和出错处理,也能都进行机构的运动仿真和理论计算等。