便携式机车车辆动态称重仪的信号处理
车辆动态称重系统的研究与设计(数据处理)--开题报告+任务书
论文(设计)题目:车辆动态称重系统的研究与设计(数据处理)院-系:工学院—自动化系专业:电气工程及其自动化毕业论文(设计)开题报告姓名杨海波性别男学号200703050407院-系工学院—自动化系专业电气工程及其自动化年级2007级论文题目车辆动态称重系统的研究与设计(数据处理)□教师推荐题目□自拟题目题目来源教师推荐题目题目类别应用研究指导教师牛林选题的目的、意义(理论意义、现实意义):随着国家工程建设市场的逐步规范,工程施工现场管理水平必须相应地提高,工程施工迫切需要解决工程车辆的运次和计量的自动化,研制能自动识别车辆、自动重量计量、自动记录,并配置有关管理软件进行管理的工程车辆自动识别和计量系统,对于降低施工企业生产成本,实现工程车辆现场管理的自动化、信息化和规范化,对提高我国工程施工现场管理水平,具有十分重要的社会与经济意义。
选题的研究现状(理论渊源及演化、国外相关研究综述、国内相关研究综述):随着称重技术由机械秤向着电子化方向的发展以及微处理器和计算机在称重技术中的应用,车载秤技术也得到了长足的发展。
主要标志是机械秤向电子化方向过渡。
其技术进步突出表现在开发出许多种外形美观、功能齐全、技术先进的称重显示控制器;专用的称重计算机;具有网络和编程功能的称重仪表:以MC模块(条码阅读模块)为核心的多秤显示控制仪表和动态称重仪表等。
而各种电子衡器的秤体结构都无明显的改进和提高,绝大多数仍沿着底座、秤体、秤台等组装结构方向发展,其秤体结构庞大,不易挪动,显然不能适应现代交通系统大流量、高效率的特点,势必要寻求另外一种发展方向,即向着减小尺寸,减少零部件,节省空间,便于生产,降低成本的方向发展。
因此行驶称重技术便成为提高智能交通系统自动化、智能化水平的关键技术之一,便携式行驶称重系统便应运而生。
便携式电子轮重仪就是受各国路政部门对公路监测与管理不断提出新要求而发展起来的。
本课题设计的便携式称重系统就是一种将秤台、支承、称重传感器合三为一的集成化称重系统。
以电子汽车衡为平台的便携式动态轴重仪校准方法

以电子汽车衡为平台的便携式动态轴重仪校准方法摘要:在便携式动态轴重仪进行校准的工作中,要按照相关的校准规范进行,符合标准操作,才能实现有效的校准,正确的校准。
本文结合在其校准应用过程中,以电子汽车衡为平台的便携式动态轴重仪具体的校准方法为对象,进行详细的研究与分析,希望在实际的应用中,有所借鉴。
关键词:电子汽车衡;便携式动态轴重仪;校准方法前言:便携式动态轴重仪具有简便、轻小的特点,在进行轴重测量和公路超限超载检查测量的过程中具有积极的使用价值,但是在普通公路上进行安装使用的过程中,测量的准确度还有待提升。
而以电子汽车衡为平台的便携式动态轴重仪的使用,有效的提升了校准的准确性。
1.便携式动态轴重仪的结构组成和原理便携式动态轴重仪还被称为便携式汽车称重仪,便携式电子磅等,在进行使用的时候,需要通过一定的施工,提前嵌入到需要进行测量的公路中,对来往的车辆载重情况进行快速的检测,对动态的公路承重情况进行检测。
在进行使用的过程中,需要在特定的公路路段中,开展具体的测重工作。
在进行汽车载重情况的测量过程中,通过公路下方设置的轴重仪器,对行驶中的机动车辆左右或者前后的轴承中荷载情况进行具体的测量,然后通过在两个互不相连的载重台上,台板和控制器的作用,对车轮的荷载情况进行实际的检测,之后通过提前设置的传感器等电子信号传输设备对测量得到的数据进行传输,并通过控制系统的转化更直观的显现在仪表盘上,方便观看。
1.便携式轴重仪的校准条件便携式轴重仪在进行校准工作开展的过程中,要按照相关的校准规范对安装的路面环境进行保障,比如在JJF1212-2008《便携式动态轴重仪校准规范》中对路面的安装环境进行了明确的规定“要保证校准过程中承载器与路面的全面接触”,这要求在承载器安装的过程中,地面要具备基本的结实、紧固特点,要能够在进行校准过程中保证承载器与路面的接触面积,并且两者之间要紧密的结合,并不能存在任何干扰作用的杂乱碎石或者物体等。
关于车载动态称重算法研究

ABS T RACT : Ai mi n g a t t h e p r o b l e m o f l o w a c c u r a c y o f v e h i c l e d y n a mi c we i g h i n g d a t a,a we i g h i n g d a t a a l g o r i t h m
信号传输至驾驶室内的称重终端 , 终端 通过 G P S / G P R S D T U 无线收发模块 将这些信 息会 同车辆 地理位 置 、 车型 、 车牌 等
集成化便携式车辆行驶称重系统的设计
() 1
图 5称 重 板 贴 片 区示 意 图
4
转换的输入 电压 和触发门槛 电压。 采用的供桥电源电压为 9 A V, / D转换 的满量程为 5 所以中间环节放大器 的放大倍数要求为 : v,
X x0 22 通常要求AD转换的输入模拟信号电 l 3。 / 压在AD /
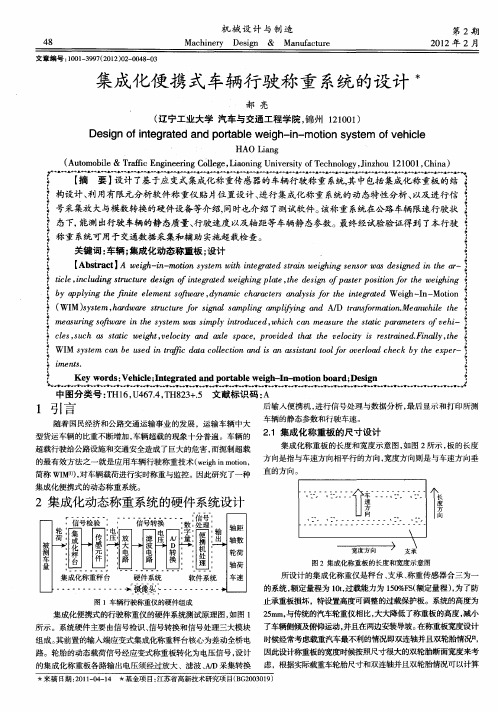
22 集成 化称重 板传 感部件 的设计 .
为便于在野外测量及稽查 ,同时要求对放大器和称重仪进
行 供 电 ,所 以要 将 某 一 电压 通 过 D — C转换 到 6 1V电 压 给 CD V、2
放大器供 电。 将此 1 V电压经稳压电路稳压到 9 2 V电压作为称重 仪的供桥 电压 , 电桥 由于载荷作用输出电压为 。 试验证明 , 在
大大降低了称重板 的高度, 减小 集成化便携式的行驶称重仪的硬件系统测试原理图 , 如图 1 2m , 5 m 与传统的汽车轮重仪相 比,
并且在两边安装导坡 。 在称重板宽度设计 所示。系统硬件主要 由信号检识 、 信号转换和信号处理三大模块 了车辆侧倾及俯仰运动 , , 组成 。 其前置的输入端应变式集成化称重秤台核心为差动全桥电 时候经常考虑载重汽车最不利的情况即双连轴并且双轮胎情况留 韵蓬 板 的宽度时候按照尺寸很大的双轮胎断面宽度来考 路 。轮胎的动态载荷信号经应变式称重板转化为 电压信号 , 设计 因此谢 寸 的集成化称重板各路输 出电压须经过放 大 、滤波 、/ AD采集转换 虑 ,根据实际载重车轮胎尺寸和双连轴并且双轮胎情况可 以计算
★来稿 1期 :0 10 — 4 - 3 2 1- 4 1 k 基金项 目: 江苏省高新技术研究项 目( G 0 3 1 ) B 2 0 0 9
第 2期
郝 亮: 集成化便 携 式车辆行驶 称 重 系统的设 计
检重机称重信号的数据处理研究

检重机称重信号的数据处理研究[摘要]动态称重是指通过称重设备获得商品的重量。
静态称重是固定在称重设备除了商品本身没有其他干扰,所以更容易得到准确的称重值,而动态称重设备更适合快节奏的称重需求。
本文首先简要介绍了动态称重的原理,对称重设备的信号采集与数据处理进行了分析研究。
[关键词]称重机;信号;数据处理;研究中图分类号:TH715.1 文献标识码:A 文章编号:1009-914X(2017)13-0152-02使用重型机器设备有:预输送机,称重输送机,剔除下输送机的三部分。
称重输送机称重,称重输送机由支撑称重输送机的传感器输送和称重。
称重系统收到传感器的称重信号后,得到商品的重量值,然后根据袋装商品的允许误差,对位于剔除输送机上的商品进行剔除或者不剔除处理。
1 动态称重系统工作原理商品放置在称重平台上时,称重传感器由于压力而变形,传感器内部的电桥平衡被破坏,输出的mv信号和承载的压力与接收到的信号结束时成正比,称重传感器收到收尾信号时说明商品称重完毕,称重设备将信号传输给电子称重仪器并放大传感器信号,通过A/D芯片将转换为数字模拟量,称量仪器后数字滤波器得到商品的实际值,然后通过串口到IPC 机主机程序。
1.1 动态系统硬件组成动态称重系统的组成包括:称重传感器(中航ZEMIC称重传感器)、称重仪表、光电开关、PLC控制仪、数据对比设备等。
其部分彼此之间的融合,分别负责将自己的信息传送给PLC控制器,然后由仪器和工业计算机连接确定相关信息。
原理图如图1所示。
1.2 PLC控制仪电子称重仪器是动态称重系统的核心部件,相当于动态称重系统的“大脑”。
主要负责接收传感器数据和其他部件的信息以及控制。
基本工作流程为:电子称重仪器接收称重传感器信号、称重传感器信号放大、A / D转换为中央处理器进行刻度转换等;传输给PLC控制器;若合格气缸停止;若不合格传动链停止气缸动作。
2 动态称重设备信号采集有效信号处理的前提是信号采集准确,信号采集的重要性非常显着,与计算机和传感器?蛄?接。
称重信号的抽样和处理(一)

图1
与模拟系统的抽样不同,在数字系统中,抽样信号需经过 A/D 转换为数字信号。用一
些幅度不连续的数值来逼近模拟信号的精确值。它与精确值之间的误差就是由不连续的量化
过程产生的。通过经 A/D 转换后,模拟信号转变为有限字长的二进制数。
由于量化是将连续量转化为非连续量,由此必然产生误差。对于量化的处理又有截尾和
率为 2.5 到 20m,整个称重长度为 M=16.6m,称重长度是由一些中距为 Δx 的称重段组成,
结果如图 6 所示。所以试图用较短的承载器测定快速行驶的机车或汽车欲得到高的测量精度 是不太可能的。特别是为行车安全,测定机车的偏载,要是称量段不够长,很难发现 1 或 2HZ 干扰带来的影响,此时虽然产生的干扰力可能不算大,但是由此引起的干扰振幅要比 高频率在相同干扰力下的振幅要大很多,对机车的安全可能产生危害。
三、抽样定理 抽样定理是 1948 年香农(Shannon)给出的,它是数字信号处理中的一个重要定理。 定理叙述如下:
设 x(t)的付利叶变换为 Χ(jΩ),且 Χ(jΩ)是带限的,其最高频率为 Ωh ,即 Ω ≥ Ωh 时,
Χ(jΩ)=0,如果 Ωh ≤ π T = Ωs 2 。这里 T 为抽样周期,Ω s 为抽样角度频率,Ω s = 2π (1 T ) 。
为 fh ,则抽样的频率信号为以
fs
=
1 T
为中心,频谱宽度为 ٛfs
±
fh ,频率间隔为
fs
=
1 T
的
频域信号。因此,当 fs < 2 fh 时,相邻抽样频率间的将发生重叠,这些重叠部分的幅值将与
—3—
原始情况不同,这样的频域信号不再可能通过逆付利叶变换恢复成原来的信号(图 2)。通 常也将乃奎斯特频率称为“折叠频率”(Folding freqnency)。
汽车衡自动称重系统称重信号处理的理论研究

第2卷 第3 6 期
20 年 0 月 08 5
佳 木 斯 大 学 学 报 (自 然 科 学 版 ) Junlf i ui n esy( a rl c neEio ) or a sU i rt N ta i c di a o Jm v i u Se tn
× 叫 m+ 叫 m】 ( 【 一 ) ( (+ ) 2 )
两式 中系数 的选 择 应 满 足 以下 约束 条 件 0
—
I
∑ =1 、
用 0
1 汽车衡称重信号处理系统的数学模型
在工程实 际中 , 号处理系统 可分为硬 系统 信 ( 模拟滤波系统) 和软系统( 数字滤波系统) 两种[ . 2 】 随着计算机 、 测控技术的发展信号处理逐步有软系 统取代 了硬系统 , 软系统具 有好 的开发性能 , 而且
K- I
— —
() 1
,l
(J >:一1 c | )= ( )
① 收稿日期1 0 一 3 1 作者简介 2  ̄ 0 — 3 0
现有的动态电子轨道衡 ( 如北京铁道学院开发 的动态轨道衡 ) 大多数采用平均算法进行数据处 理. 但是用于汽车衡 自动称重系统的称重传感器的 输出信号中 , 噪声的干扰相当大且无规律 , 以动 所 态电子汽车衡的数据处理不宜采用平均算法 . 虽然 离散傅里叶变换 可进行谱 分析 , 由于计算量太 但
关键词: 汽车衡 ; 动称重 系统 ; 自 信号处理 中图分 类号 : T 75 1 H 1. 2 文献标 识码 : A
汽车衡称重传感器输入信号处理系统的实际 信号中的主要噪声是称重系统和汽车的振 动引起 的由正弦曲线和余弦曲线叠加而成的噪声 , 它也是 信号处理系统所要滤除噪声中的主要部分【 . l 】
动态公路车辆自动衡器常见故障分析处理及维护

卡死 ; 车辆 轴数 是 否正 确 ; 空 秤 零 点 是 否过 大 ; 传感 器 是 否受 力均 匀 ; 传 感 器是否 坏 掉 ; 称 体下 面是 否被 泥土 杂物
的 电阻档可 以具 体 判 断 引线 功 能 : ① 一② 激 励 电压 输 入
器组 成 , 相 向分置 车 道 两 旁 。用来 进 行 车辆 分 离 及 提供
开始、 结束等信号。
( 3 ) 地感 线 圈 : 用 来 进 行 车 辆 的辅 助 分 离 。 通 过 电
磁感应判断是否有车辆通过线 圈。主要用来完成测速 、 倒车 的检 测 , 并 与红 外 线 光栅 分 离 器 一 起对 非 车 辆 以外
( 1 ) 有 车辆信 息 , 信息 不对
① 故 障现象 : 车辆 重 量 不 对 。重 量偏 重 或偏 轻 首 先 检查 车辆 是否匀 速 过称 ; 称 体 和框 架 是 否 有 硬 物或 限位
( 1 ) 称 台: 通 过 秤 台下 面 的 称 重 传感 器 所 受 到 的压 力变 化 , 引起 称重传 感 器 内应 变计 受 到 载 荷 时 的 电 阻变
1 称重 系统 的构成
( 5 ) 控制 柜 : 控 制柜 内嵌 入 式 系 统处 理 控 制 光 幕 、 地
感线圈、 称重 传感 器 、 轮胎识 别器 等 , 送来 的信 息 , 通 过 分
析 和处 理得 出车 辆载 荷 信 息 , 这 是 动 态汽 车衡 的关 键 控 制 部位 。 2 动态 汽 车衡 常见 故障分 析及 处理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
48
内燃机车
2009 年
态称重仪时所 采集的信号 , 故对采 集信号进 行截 取, 得到有效的处理信号 , 如图 5 所示。
采用 EMD 方 法对 被 处理 信 号进 行 分解 , 由 MATLAB 中编写 M 函数来实现, M 函数程序流程如 图 6 所示。 以车速为 4 95 km/ h 左通道的第一个信号为 例进行 EMD 分解。待过程平 稳提取剩 余分量 r n ( t ) , 如图 7 所示。取 r n ( t ) 的平均值作为单 个轮 重, 4 个轮重相加为一侧轴重。同理求得另一侧轴 重, 两者相加即为整车重量。
收修回稿日期 : 2008 10 27 资助项目: 辽宁省教育厅计划资助项目 ( 2004D119) 作者简介 : 付研 宇 ( 1982 ) , 男 , 满族 , 黑 龙江 绥化 人 , 硕士研究生。
第 3 期 ( 总第 421 期 )
付研宇 : 便携式机车车辆动态称重仪的信号处理
47
信号的趋势或均值。 IMF 要满足两个条件 : ! 整个 数据集的极大值、 极小值的数目和穿越零点的次数 要相等或最多相差 1; ∀ 极大值点确定的上包络线 和极小值确定的下包络线的均值要始终为零。 EMD 中的每一阶 IMF 由如下方法筛选得到。 ( 1) 对于要进行分解的信号 y ( t ) , 找出 y ( t ) 上所有的极值点 , 用 3 次样条曲线连接所有的极大 值点 , 形成 y ( t ) 的上包络线; 连接所有极小值点形
1
前言
在铁路轨道上对各种铁路车辆及其装载货物
只介绍其信号处理部分的内容。
重量计量称量的器具称为轨道衡。轨道衡广泛应 用于铁路、 城轨、 地铁、 煤炭、 矿山、 冶金、 石化、 港口 等行业。随着国民经济的高速发展, 各行业对铁路 车辆计量工作提出了快速、 准确的更高要求。但由 于动态称重是车辆以一定速度通过称重仪, 不仅对 称重仪的作用时间很短( 在几百毫秒以内 ) , 而且作 用在称重仪上的力除真实轴重外, 还有许多因素产 生的干扰力, 如车速、 车辆自身谐振、 路面激励、 轮 盘驱动力等。可以说真实轴重被淹没在各种干扰 力中, 给动态称重实现高精度测量造成很大困难。 因此 , 在外界随机不确定度干扰力作用下如何准确 测量真实轴重, 就成了动态轴重测试系统的技术难 点和关键。本文中研制的动态称重仪是一种实用 新型产品, 仪 器结构紧 凑、 重 量轻、 携带和操 作方 便、 安装简单、 无需对轨道进行任何施工、 成本低, 并且不同量程下可换性好、 可靠性高、 维护方便, 该 仪器具有目前轨道衡难以比拟的优点 , 可广泛用于
2
便携式轨道衡信号处理
本设计的基本流程如图 1 所示。
2. 1
数据采集
设计的称重仪采用的是应变式力传感器 , 称重 仪安装在铁轨 之间, 传感 器弹性体 塞入铁轨 钢槽 内, 称重时轮对通过钢轨产生应变, 通过测量称重 梁的弹性变形则可得到车辆的重量。称重仪的信 号处理实现过程为, 列车经过钢轨产生压应变 , 通 过数据采集卡 采集信号, 并将采集 后的信号 输入 LabVIEW 中, 滤出有效信号后调用 EMD 的程序脚 本 mat lab script 进行数据处理 , 处理后输出有效值。 称重仪安装图如图 2 所示。 根据设计的称重仪的工作原理, 采取双通道的 数据采集 , 把应变通过传感器转化为电压信号进行 采集 , 根据机车的运行速度不同, 可以自行调节采 样频率。并在 LabVIEW 的基础上编制程序。数据 采集卡采用 5 V 稳压电源, 采样频率为 1 024 Hz, 采 集信号如图 3 所示。
# imf i ( t ) + Nhomakorabean
rn( t )
由于各阶 IMF 分量的上下包线的均值相等, 关 于零轴对称 , 因此可以认为各阶 IMF 只与信号所含 的固有振动特性有关, 与信号的偏移量无关, 而将 分解得到的残余量 r n ( t ) 看作信号的偏移量。 根据这个思路, 将 EMD 用于轴重信号的处理, 滤除信号中的动态部分, 而求出与真实轴重相对应 的稳态部分 r n ( t ) 。 2. 2. 2 信号处理 根据 EMD 方法原理, 首先要确定 采样信号中 轴重信号的范围 , 原始采样信号范围波形如图 4 所 示。信号从零上升到第一个极大值点反映了转向 架从接触称重仪到完全进入称重仪这一过程 , 从最 后一个极大值点到零反映了转向架脱离称重仪过 程。由于称重过程的有效信号为机车平稳经过动
图4
采样信号波形图
图 5 被处理信号波形图
图 7 剩余分 量 r n ( t)
3
结论
5 组实测数据( 车速为 4 95 km/ h, 1 12 km/ h,
2 2 km/ h, 4 5 km/ h, 0 94 km/ h) , 每组 32 万采样 点数, 均以上述信号为例 , 分析结果如表 1 所列, 表 中显示车速在 5~ 8 km/ h 范围内 , 误差为 3% , 小于 允许使用误差 5% 。
i= 1
图3
系统界面图
界面有参数设置、 转换、 左通道、 右通道、 脉冲 值以及左右轮重、 轴重等功能模块。转换按键可以 确定输入信号的长度。参数设置可以根据所测得 实际波形来调节波形的参考值 , 以便对所采集的信 号进行处理。两个图形显示界面可以实时采集车 辆经过称重仪时左右两侧轮对所输出的波形。调 节脉冲数可以得到不同的脉冲值( 即所经过车轮的 轮重 ) 。 2. 2 数据处理方法 在过去几十年的动态称重技术研究中, 在如何 保持检测精度的前提下提高车辆通过速度一直是 各研究机构所致力解决的问题 , 不懈的努力使动态 称重技术已经得到了很大的发展。综合国内、 外资 料, 目前动态称重数据处理方法主要有: 位移积分 法, 补偿法, 专家系统 , 参数估计法, 神经网络以及 本文采用的 EMD 法。 2. 2. 1 EMD 原理 EMD 是美国国家航空航天局 ( NASA) 的 Huang 等在 1998 年首先提出的一种新的信号处理方 法。 该方法认为, 任何信号都可分解成若干不同的本征 模态 函数 IMF ( intrinsic mode function) 和一 个残 余 量, 各 IMF 反映了信号的局部特性, 残余量反映了
第 3 期 ( 总第 421 期)
内燃机车
2009 年 3 月
装 置 仪表
便携式机车车辆动态称重仪的信号处理
付研宇, 丁彦闯
( 大连交通大学 机械工程学院 , 辽宁 大连 116028) 摘要 : 根据振动的瞬时非线性特点 , 提出采用振动信号的本征模函数 ( IMF) 对实测信号进行 特征频带识别。 将采集的振动信号经经验模态分解 , 并去掉主要干扰因素所对应的 IMF 分量, 以 得到真实的有效信号 。实际测试结果表明, 对提取后的信号进行计算后能得到准确的轴重值 。 关键词 : 动态称重 ; 轨道车辆; 信号处理 ; LabVIEW; MATLAB; EMD 中图分类号 : TH715 文献标识码: A 文章编号: 1003 1820( 2009) 03 0046 03 多种环境。由于此课题是一个综合科研项目 , 本文
图 2 称重仪安装图
成下包络线, 确保所有的点在上下包络线之间。定 义上下包络线的均值为 m 1( t ) , y ( t ) 与 m 1( t ) 的差 定义为 : h 11( t ) = y ( t ) - m 1( t ) 。如果 h 1l( t ) 满足 以下 2 个条件 , 则为第一阶 IMF: ! 在整个时程内, 极值点的个数与穿越零点的次数相等或最多差 1; ∀ 在任意点处上 下包络线的均 值为零。如果 h 1l ( t ) 不满足上述条件 , 则对 h 1l( t ) 当作上述过程中 的 y ( t ) 进行筛选。 ( 2) 假定经过 k 次筛选后 ( 通常 k < 10) , 得到 的 h k l( t ) 满足 IMF 的定义 , 则信号 y ( t ) 的第一阶 IMF 分量 为 imf 1 ( t ) = h k l ( t ) 。然后 , 将 y ( t ) 与 imf 1( t ) 的差 r 1( t ) = y ( t ) - imf 1( t ) 作为新的分析 信号重复步骤 ( 1) 的筛选过程, 得到第二阶 IMF 分 量 imf 2( t ) 。 ( 3) 按此方法继续分解, 直到第 n 阶 IMF 分量 imf n ( t ) 或其余量 r n ( t ) 小于预先设定的值 , 或者余 量 r n ( t ) 已经成为单调函数的时候 , 整个筛选过程 停止。于是 , y ( t ) 可以表示成 n 个 IMF 分量和一 个余量的和, 即 : y( t) =
表 1 实验结果分析
车速 / km h- 1 实测值 - 真值 /% 真值 4. 95 2. 8 1. 12 2. 0 2. 2 0. 25 4. 5 1. 2 0. 94 2. 6
参考文献:
[ 1] [ 2] [ 3] 杨乐平 , 李海涛 , 杨磊 . LabVIEW 程序设计与应用 [ M] . 北京 : 电子工业出版社 , 2004. 于 哲峰 , 杨智 春 . EMD 技 术在动 态称重 数据处 理中的 应用 [ J] . 机械科学与技术 , 2004, 23( 4) : 244 246. Huang N E, Shen Z, Long S R, et al. The empirical mode decompo sit ion and the Hilbert spectrum for nonlinear and non stat ionary t ime series analysis [ A ] . Proceedings of Royal Society. London, 1998, ( 44) : 903 995.