计算机组成原理设计(十条指令)
计算机组成原理中的指令与指令集
计算机组成原理中的指令与指令集计算机组成原理是计算机科学与技术专业的一门基础课程,旨在介绍计算机系统的各个组成部分及其工作原理。
在这门课程中,指令与指令集是其中一个重要的内容,它涉及到计算机的指令执行过程和指令的编码方式。
一、指令的基本概念和作用指令是计算机程序中最基本的执行单位,它是计算机硬件中能够被执行的操作。
指令包括了操作码和操作数两个部分,操作码指明了要执行的操作类型,而操作数指明了操作码要操作的数据。
指令的作用是通过对数据的操作和处理来实现程序的功能。
不同的指令可以完成不同的操作,例如数据传输、运算、逻辑判断等。
通过不同的指令的组合和执行,计算机可以完成各种复杂的任务。
二、指令格式与编码方式指令的格式和编码方式是计算机硬件设计中的关键问题,它涉及到指令的存储、传输和执行等方面。
常见的指令格式包括固定格式、可变格式和寄存器-存储器格式等,不同的指令格式适用于不同的计算机体系结构。
指令的编码方式是指将指令的各个部分和参数按照特定的规则编码成二进制数。
根据指令的长度不同,编码方式可以分为定长编码和变长编码。
定长编码将所有指令都表示为相同长度的二进制数,这样可以简化指令的解码过程;而变长编码可以根据指令的需要灵活地分配不同长度的二进制数。
三、指令集的组成和分类指令集是一组用于描述计算机指令的规范,它包括了计算机所能执行的所有指令的集合。
指令集可以根据不同的要求和功能进行分类,常见的分类方式包括RISC指令集和CISC指令集。
RISC(Reduced Instruction Set Computers)指令集是一种精简指令集,它的设计原则是将指令集的数量减少到最小,并且每条指令的执行时间相当。
RISC指令集的特点是指令简单、指令执行时间短、流水线技术应用广泛等。
CISC(Complex Instruction Set Computers)指令集是一种复杂指令集,它的设计原则是将常用的操作通过单条指令来完成,以减少程序的长度和执行时间。
计算机组成原理 MIPS

k
c j
字对齐方式下的存储器访问
速度较高 接口较简单
CPU
寄存器 Byte3
Byte2
Byte1
Byte0
2020/11/20
Byte3 Byte2 Byte1 Byte0 存储器
字不对齐方式下的存储器访问
节省空间 访存速度慢 接口复杂
CPU
寄存器 Byte3 Byte2 Byte1 Byte0
操作码 地址码 1 地址码 2 地址码 3
例1 设某台计算机有100条指令, (1) 采用固定长度操作码编码,试设计其操作码的编码。 (2) 假如这100条指令中有10条指令的使用概率达到90%,其余 90条指令的使用概率为10%。试采用不等长编码设计操作码。
解:
(1) 采用固定长度操作码编码时,需要7位操作码。 取其中的100个代码作为指令操作码,可以用 0000000到1100011之间的代码代表100条指令,即
2020/11/20
访存次数问题
– Char c; – Short int i,j; – int k;
int i Int k
Char c Short j Int k
字对齐方式下的数据存储
2020/11/20
空间浪费问题
– Char c; – Short int i,j; – int k;
零地址指令
操作码
地址码
1111 1100 0000 0000~1111 1100 0000
指令的格式
R1
ADD load
2020/11/20
三、指令长度
固定长度
– 取指快、译码简单。 – 单字长、双字长、多字长
可变长度
– 可提高编码效率 四、指令助记符
计算机组成原理第8章习题指导
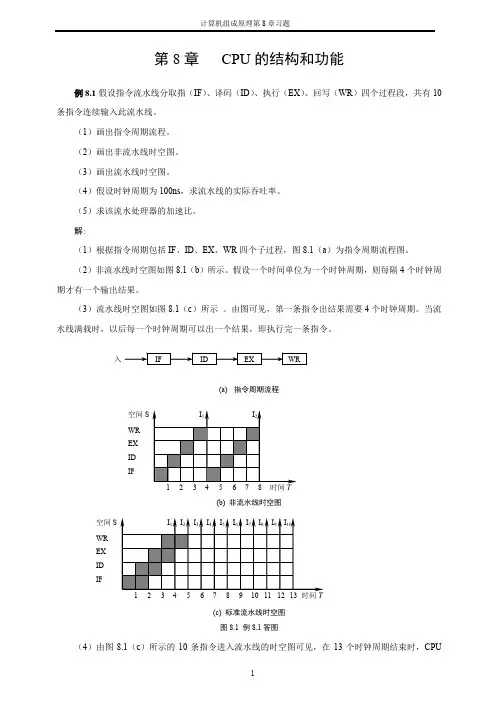
第8章CPU的结构和功能例8.1假设指令流水线分取指(IF)、译码(ID)、执行(EX)、回写(WR)四个过程段,共有10条指令连续输入此流水线。
(1)画出指令周期流程。
(2)画出非流水线时空图。
(3)画出流水线时空图。
(4)假设时钟周期为100ns,求流水线的实际吞吐率。
(5)求该流水处理器的加速比。
解:(1)根据指令周期包括IF、ID、EX、WR四个子过程,图8.1(a)为指令周期流程图。
(2)非流水线时空图如图8.1(b)所示。
假设一个时间单位为一个时钟周期,则每隔4个时钟周期才有一个输出结果。
(3)流水线时空图如图8.1(c)所示。
由图可见,第一条指令出结果需要4个时钟周期。
当流水线满载时,以后每一个时钟周期可以出一个结果,即执行完一条指令。
(a)指令周期流程(b) 非流水线时空图(c) 标准流水线时空图图8.1 例8.1答图(4)由图8.1(c)所示的10条指令进入流水线的时空图可见,在13个时钟周期结束时,CPU执行完10条指令,故实际吞吐率为:10/(100ns×13) ≈ 0.77×107条指令/秒(5)在流水处理器中,当任务饱满时,指令不断输入流水线,不论是几级流水线,每隔一个时钟周期都输出一个结果。
对于本题四级流水线而言,处理10条指令所需的时钟周期数为T4 = 4 +(10 −1)= 13。
而非流水线处理10条指令需4×10 = 40个时钟周期。
故该流水处理器的加速比为40 ÷13 ≈ 3.08 例8.2设某机有四个中断源1、2、3、4,其硬件排队优先次序按1→2→3→4降序排列,各中断源的服务程序中所对应的屏蔽字如表8.1所示。
表8.1 例8.2各中断源对应的屏蔽字中断源 屏蔽字1 2 3 41 1 1 0 12 0 1 0 03 1 1 1 14 0 1 0 1(1)给出上述四个中断源的中断处理次序。
(2)若四个中断源同时有中断请求,画出CPU执行程序的轨迹。
计算机组成原理(十二条指令)
计算机学院计算机科学与技术专业《计算机组成原理课程设计》报告(2008/2009学年第一学期)学生姓名:闫全胜学生班级:计算机062202H学生学号: 200620030227指导教师:康葆荣2009年1月3日目录1 关于此次课程设计 (2)1.1 设计的目的: (2)1.2 设计内容及要求: (2)2 分析阶段 (3)2.1指令译码电路分析 (3)2.2 寄存器译码电路分析 (4)2.3 微指令格式分析 (5)2.4 时序分析 (6)3 初步设计阶段 (7)3.1 数据格式 (7)3.2指令描述 (7)3.3 存储器分区 (9)3.4 控制台微程序流程: (10)3.5 运行微程序 (11)4 详细设计阶段 (12)4.1控制台流程分解 (12)4.2 运行微程序子流程 (15)4.3 微程序总流程图 (24)5 实现阶段 (25)5.1 所用模型机数据通路的介绍 (25)5.2 微程序代码设计与编写 (26)微程序二进制代码表 (26)5.3 机器指令的输入及运行 (28)心得体会 (30)参考资料 (31)1 关于此次课程设计1.1 设计的目的:本课程设计是计算机科学与技术专业重要的实践性教学环节之一,是在学生学习完《计算机组成原理》课程后进行的一次全面的综合设计。
目的是通过一个完整的8位指令系统结构(ISA)的设计和实现,加深对计算机组成原理课程内容的理解,建立起整机系统的概念,掌握计算机设计的基本方法,培养学生科学的工作作风和分析、解决实际问题的工作能力。
1.2 设计内容及要求:基于TDN-CM++计算机组成原理实验教学系统,设计和实现一个8位指令系统结构(ISA),通过调试和运行,使设计的计算机系统能够完成指定的功能。
设计过程中要求考虑到以下各方面的问题:1、指令系统风格(寄存器-寄存器,寄存器-存储器,存储器-存储器);2、数据类型(无符号数,有符号数,整型,浮点型);3、存储器划分(指令,数据);4、寻址方式(立即数寻址,寄存器寻址,直接寻址等);5、指令格式(单字节,双字节,多字节);6、指令功能类别(算术/逻辑运算,存储器访问,寄存器操作,程序流控制,输入/输出);7、依据CPI值对指令系统进行性能分析。
《计算机组成原理》5-指令系统

◆ CPU中设置程序计数器(PC)对指令的顺序号进行计 数。PC开始时存 放程序的首地址,每执行一条指令,PC 加”1”,指出下条指令的地址, 直到程序结束。
跳跃寻址 Leabharlann 转移指令指出AA22AA33
…
…
…
…
1111 1110 A2 A3
12 位操作码
1111 1111 0000 1111 1111 0001
AA33
…
…
…
…
1111 1111 1110 A3
16 位操作码
…
…
1111 1111 1111 0000 1111 1111 1111 0001 1111 1111 1111 1111
24
双字
28
双字(地址32)▲
32
双字
36
边界未对准
地址(十进制)
字( 地址2)
半字( 地址0)
0
字节( 地址7) 字节( 地址6)
字( 地址4)
4
半字( 地址10)
半字( 地址8)
8
5.2.2 数据类型
2、数据在计算机中存放方式
存储字长内部字节的次序
例: 12345678H如何存储? 12 34 56 78H
5.3.1指令寻址
指令寻址----计算指令有效地址的方法
指令地址
指令
指令地址寻址方式
PC +1
0 LDA
11 ADD 22 DEC 33 JMP
4 LDA
5 SUB 6 INC
77 STA 88 LDA
计算机组成原理指令系统
…
Ri 操作数
Rn 寄存器
• 执行阶段不访存,只访问寄存器,执行速度快 • 寄存器个数有限,可缩短指令字长
6. 寄存器间接寻址
EA = ( Ri )
寻址特征
OP
Ri
指令中的形式地址为寄存器的编 号,寄存器的内容是操作数的有 效地址。
主存
R0
…
…
Ri 地址
操作数
…
…
MOV AX , [BX]
Rn 寄存器
PC
7. 基址寻址
(1) 采用专用基址寄存器(隐式)
EA = ( BR ) + A
BR 为基址寄存器
寻址特征
OP
A
主存
BR
ALU
操作数
• 可扩大寻址范围 • BR 内容由操作系统或管理程序确定 • 在程序的执行过程中 BR 内容不变,形式地址 A 可变
(2) 采用通用寄存器作基址寄存器(显式)
寻址特征
(1) 寄存器寻址 R (2)寄存器间接寻址 (R)
(3)直接寻址 1000 (4)存储器间接寻址 (1000)
(5)相对寻址-2000(PC) (6)立即数寻址 #2000
解: (1) Data=( R)=1000 (2) Data=( ( R) )=(1000)=2000 (3) Data=(1000)=2000 (4) Data=((1000))=(2000)=3000 (5) EA=(PC)-2000=4000-2000=2000
(1) 相对寻址举例
LDA # 0
LDX # 0
M
ADD X, D
M+1 INX
M+2 M+3
CPX # N BNE M DIV # N
计算机组成原理微程序设计乘法指令
郑州轻工业学院本科计算机组成原理课程设计总结报告设计题目:基本模型机的设计与实现学生姓名:系别:专业:班级:学号:指导教师:2011 年1月7 日郑州轻工业学院课程设计任务书题目基本模型机的设计与实现专业、班级学号姓名主要内容:乘法指令、停机指令的设计与实现。
基本说明:由于乘法指令较为复杂,本次模型机设计只完成乘法机器指令和停机指令的设计与实现。
主要参考资料等:《计算机组成原理》白中英主编科学出版社。
完成期限:一周指导教师签名:课程负责人签名:2011年 1月 7 日目录课程设计任务书 (2)一、微程序控制器的基本原理 (4)二、模型机结构 (5)三、微指令格式 (6)四、指令系统 (7)五、指令流程图 (8)六、程序清单 (9)七、微程序清单 (10)八、心得与体会 (11)附录:微程序详解 (11)1. 总述 (11)2. 乘法算法 (11)3. 实现难点 (12)一、微程序控制器的基本原理微程序控制器原理框图如图所示。
它主要有控制存储器、微指令寄存器和地址转移逻辑三大部分组成。
其中微指令寄存器分为微地址寄存器和微命令寄存器两部分。
(1)控制存储器控制存储器用来存放实现全部指令系统的微程序,机器运行时只读不写。
其工作过程是:每读出一条微指令,则执行这条微指令接着以读出下一条微指令,又执行这条微指令……。
(2)微指令寄存器微指令寄存器用来存放由控制存储器读出的一条微指令信息。
其中微地址寄存器决定将要访问的下一条微指令的地址,而微命令寄存器则保存一条微指令的操作控制字段和判别测试字段的信息。
(3)地址转移逻辑在一般情况下,微指令由控制存储器读出后直接给出下一微指令的地址,通常我们简称微地址,这个微地址信息就存放在微地址寄存器中。
如果微程序不出现分支,那么下一条微指令的地址就直接由微地址寄存器给出。
当微程序出现分支时,意味着微程序出现条件转移。
在这种情况下,通过判别测试字段P和执行部件的“状态条件”反馈信息,去修改微地址寄存器人内容,并按改好人内容去读下一条微指令。
计算机组成原理 指令系统
IBM 370机的指令格式
8
4 4
4 4 4 12
RR型 RX型 RS型 SI型 SS型
OP
8
R1 R2 R1 X2
4 4
OP
8
B2
4
D2
12
OP
8
R1 R2
8
B2
4 B1 4
D2
12
OP
8
I2
8
D1
12 4 12
OP
L1
B1
D1
B2
D2
图4-1 IBM 370机的指令格式
2.非规整型
操作码字段的位数丌固定,丏分散地放 在指令字的丌同位置上。 PDP-11机(字长16位)的指令分为单 字长、两字长、三字长三种,操作码字段占4 ~16位丌等,可遍及整个指令长度。 显然,操作码字段的位数和位置丌固定 将增加指令译码和分析的难度,使控制器的设 计复杂化。
入 端口地址 如 出 如 AX, n IN AL, n CPU 的寄存器 OUT n, AL AX CPU 的寄存器 IN AL, DX AX, DX 端口地址 OUT DX, AL AX
4.2 寻址技术
所谓寻址,指的是寻找操作数的地址或下一 条将要执行的指令地址。寻址技术包括编址方 式和寻址方式。
AAA AAS AAM AAD AND OR NOT XOR TEST
3. 移位操作 算术移位
逻辑移位
循环移位(带迚位和丌带迚位)
4. 转移 (1) 无条件转移 JMP
(2) 条件转移 结果为零转 (Z = 1) JZ
如
结果溢出转
(O = 1)JO
300 …
完成触収器
结果有迚位转(C = 1)JC 跳过一条指令 SKP
计算机组成原理指令系统
高级语言与低级语言的性能比较
4.2 指令格式
指令字(简称指令)即表示一条指令的机器字。 指令格式则是指令字用二进制代码表示的结构形式,由 操作码字段和地址码字段组成。
操作码字段பைடு நூலகம்地址码字段
4.2.1
操作码
操作码字段表征指令的操作特性与功能;
操作码字段的位数取决于指令系统的规模,有固定位 数和可变位数;
A1 A1
A2
A3 A2
A1
三地址指令
指令格式如下: θ A1 A2 A3 结果
操作码θ 第一操作数A1 第二操作数A2 A3
(A1)θ(A2)→A3 (PC) +1→PC 这种格式虽然省去了一个地址,但指令长度仍比 较长,所以只在字长较长的大、中型机中使用, 而小型、微型机中很少使用。
3. 指令系统:一台计算机中所有机器指令 的集合,它是表征一台计算机性能的重 要因素,其格式与功能不仅直接影响到 机器的硬件结构也直接影响到系统软件, 影响到机器的适用范围。
下面我们来看一下计算机指令系统的发展过程
50年代:指令系统只有定点加减、逻辑运算、
数据传送、转移等十几至几十条指令。 60年代后期:增加了乘除运算、浮点运算、十 进制运算、字符串处理等指令,指令数目多达 一二百条,寻址方式也趋多样化。 60年代后期开始出现系列计算机
等长(指令规整,译码简单) 例如IBM 370机,该机字长32位,16个通用寄 存器R0~R15 ,共有183条指令;指令的长 度可以分为16位、32位和48位等几种,所有指 令的操作码都是8位固定长度。 固定长度编码的主要缺点是:信息的冗余极大, 使程序的总长度增加。
4.2.2 地址码
(完整版)计算机组成原理课后作业答案(包健第二版)完整
P156 4.1X=0.1101 Y=-0.0110(设机器数长度为8位)[X]补=0.1101000[-X]补=1.0011000[2X]补=溢出[-2X]补=溢出[X/2]补=0.0110100[-X/2]补=1.1001100[Y]补=1.1010000[-Y]补=0.0110000[2Y]补=1.0100000[-2Y]补=0.1100000[Y/2]补=1.1101000[-Y/2]补=0.0011000[-Y/4]补=0.0001100P156:2、(1)(2)P156:4-46-1原码恢复余数算法6-2原码加减交替算法P156:4.8阶码(5位补码)尾数(6位补码)(1)X=-1.625=-1.101B Y=5.25=101.01B X+YX-Y:1、对阶同上2、尾数相减:11.1100110+ 11.01011[E X-Y]补= 11.00100103、结果不需规格化4、舍入处理:[E X-Y]补=1.00101[X-Y] = 0,0011 1,00101P108:9-1阶码(5位移码)尾数(6位补码)(1)X=5.25=101.01B Y=-1.625=-1.101B X*Y9-1 X/Y:9-2 X*Y9-2 X/Y《存储体系》P225:2、 (1) 片641641161664=⨯=⨯⨯K K(2) s msμ625.151282=(3) s ns μ64500128=⨯ P225:3、(1) 最大主存容量=bit 16218⨯(2) 共需片6416416416218=⨯=⨯⨯bitK bit芯片;若采用异步刷新,则刷新信号的周期为s msμ625.151282= (3) 每块8字节,则Cache 容量为行925128162==⨯BytebitK ,即c=9,Cache 采用2路组相联映射,则r=1。
主存容量为块161828162=⨯Bytebit,即m=16。
每块包含4个字,每字包含2个字节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 关于此次课程设计1.1 课程设计目的本课程设计是计算机科学与技术专业重要的实践性教学环节之一,是在学生学习完《计算机组成原理》课程后进行的一次全面的综合设计。
目的是通过一个完整的8位指令系统结构(ISA)的设计和实现,加深对计算机组成原理课程内容的理解,建立起整机系统的概念,掌握计算机设计的基本方法,培养学生科学的工作作风和分析、解决实际问题的工作能力。
1.2课程设计内容及要求基于TDN-CM++计算机组成原理实验教学系统,设计和实现一个8位指令系统结构(ISA),通过调试和运行,使设计的计算机系统能够完成指定的功能。
设计过程中要求考虑到以下各方面的问题:(1)指令系统风格(寄存器-寄存器,寄存器-存储器,存储器-存储器);(2)数据类型(无符号数,有符号数,整型,浮点型);(3)存储器划分(指令,数据);(4)寻址方式(立即数寻址,寄存器寻址,直接寻址等);(5)指令格式(单字节,双字节,多字节);(6)指令功能类别(算术/逻辑运算,存储器访问,寄存器操作,程序流控制,输入/输出)。
要求学生综合运用计算机组成原理、数字逻辑和汇编语言等相关课程的知识,理解和熟悉计算机系统的组成原理,掌握计算机主要功能部件的工作原理和设计方法,掌握指令系统结构设计的一般方法,掌握并运用微程序设计(Microprogramming)思想,在设计过程中能够发现、分析和解决各种问题,自行设计自己的指令系统结构(ISA)。
2 分析阶段2.1 微指令格式分析微指令格式如下表:表2-1 微代码定义(1)字段24~19控制运算器的控制端,通过改变S3~CN来决定对数据进行何种算术或逻辑运算。
本设计中全部为正逻辑运算。
(2)字段18为控制对主存W/R的开关Y1、Y2进行选择。
(4)字段15~7为A、B、C三个开关控制端。
A字段B字段C字段(5)字段6~1为该条微程序的八位二进制后继地址,其决定顺序执行哪条微程序。
2.2指令译码电路分析指令译码工作原理图如下:图2.1 指令译码原理图P(1) ~P(4)为低电平有效,当选用时该信号为零;I7 ~I2表示机器指令前六位;SE5 ~SE1表示能够强置改变入口地址的后五位。
根据上图得出指令译码器的逻辑表达式如下:拟定机器指令通过上式即可算出每条子程序的入口地址。
2.3 寄存器译码电路分析寄存器译码原理图如下。
LDB0LDR1LDR2I1I0LDRiR0-BR1-BR2-BRD-BRS-BRI-BI3I2图2.2 寄存器译码原理图寄存器的输入、输出不仅决定于输入、输出开关,还与机器指令的后四位(即I3~I0)有关,由其决定哪个寄存器被选中。
2.3.1 寄存器的输入LDRi 为寄存器的输入开关,且为低电平有效(即LDRi=0),I1、I0对寄存器进行选择,决定数据进入哪个寄存器。
2.3.2 寄存器的输出RS-B 、RD-B 、RI-B 为寄存器的输出开关,且为低电平有效;I3、I2对寄存器进行选择,决定从哪个寄存器输出指令;从原理图上可以得出R2-B 的输出,若RI-B 有效则无需关注I3、I2因而I3、I2可为任意状态。
2.4 时序分析T1、T2、T3、T4为节拍控制端,本设计用了T4节拍控制端,当指令通过译码器P (1)时,P(1)对操作码进行测试,通过节拍脉冲T4的控制,以便识别所要求的操作。
图2.3 时序信号图TS1时进行微程序控制器控制,TS2时进行微指令寄存器控制,TS时控制LDIR、LDAR,TS4时对P(1)、P(2)、P(3)、P(4)、AR、LOPC、LDRi、LDDR1、LDDR2进行控制。
3 初步设计阶段3.1 数据格式和机器指令描述3.1.1 数据格式本设计中所有需要处理的数据全部采用定点无符号整数表示,8个bit位,格式如下:数据的范围是0~28,即0~255。
3.1.2 机器指令描述机器指令描述见下表。
3.2 控制台微程序流程3.2.1 公操作对机器进行总清零CLR 1-0-1。
选中P(4),通过译码形成入口地址。
3.2.2 强置写形成入口地址后,执行写操作。
1.(1)打开PC-B 将数据送到总线上; (2)打开LDAR 将数据从总线流到AR 中; (3)打开LDPC ,让自动加1的数据进入PC 中。
2.(1)打开SW-B 将数据送到总线上, (2)打开LDDR1将数据从总线流到DR1中。
3.(1)打开ALU-B 将数据送到总线上,其间DR1中的数据相当于在ALU 中做F=A 的运算;(2)打开CE、WE置成01状态,将数据从总线流到主存相应地址单元中,完成数据写操作。
3.2.3 强置读1.(1)打开PC-B将数据送到总线上;(2)打开LDAR将数据从总线流到AR中;(3)打开LDPC,让自动加1的数据进入PC中。
2.(1)打开CE、WE置成00状态,将数据从主存送到总线上;(2)打开LDDR1将数据从总线流到DR1中。
3.(1)打开ALU-B将数据送到总线上,其间DR1中的数据相当于在ALU中做F=A的运算;(2)打开LED-B,数据从总线流到输出单元,在数码管上显示出来,完成数据读操作。
3.2.4 执行程序形成入口地址后,开始执行程序。
所有都为空操作,只是要通过后继地址转入到运行微程序的流程中。
3.2.5 控制台指令PC 计数器在用清零开关CLR 清零后,通过控制台开始进行机器指令的读写和执行,此处将00Q 的后继地址设为20Q (即010000)。
此时只有P(4)有效,即P(4)=0,P(1)=P(2)=P(3)=1。
强置改变有一个特点,当SEi 为1时无效,不能改变;只有SEi 为0时,才能对该位上的数进行改变;但只能由0变成1,而不能逆转。
1. 强置写指令当进行机器指令写入时,将SWB,SWA 置成01状态,通过指令译码器的逻辑表达式即可算出入口地址。
SE5=1 SE4=1 SE3=1 SE2=1 SE1=0SE5~SE2均无效,只有SE1有效,即可得出010000改变为010001,即强置写的入口地址为21Q 。
2. 强制写指令当进行机器指令写入时,将SWB,SWA置成00状态,通过指令译码器的逻辑表达式即可算出入口地址。
SE5=1SE4=1SE3=1SE2=1SE1=1SE5~SE1均无效,不能对 010000进行改变,即强置写的入口地址为20Q。
3. 程序执行指令当进行机器指令写入时,将SWB,SWA置成11状态,通过指令译码器的逻辑表达式即可算出入口地址。
SE5=1SE4=1SE3=1SE2=0SE1=0SE5~SE3均无效,SE2和SE1有效,即可得出010000改变为010011,即强置写的入口地址为23Q。
3.2.6 控制台流程图综合以上所有操作,即可得出控制台的总流程图。
图3.1 控制台流程图3.3 机器指令初步设计PC计数器在用清零开关CLR清零后,通过控制台进入机器指令执行状态,然后开始运行微程序。
此时只有P(1)有效,即P(1)=0,P(2)=P(3)=P(4)=1,且SWB,SWA仍为11。
此处将运行P(1)的上一步微指令的后继地址设为40Q(即100000),应用指令译码器的逻辑表达式对其进行改变得出微程序入口地址。
由于决定入口地址的只有机器指令的前四位(即I7~I4),则通过拟定其先得出入口地址,并检验拟定的前四位是否合理,如下表所示。
表3-2 机器指令前四位根据寄存器译码分析可以得出机器指令的后四位。
通过以上可得出完整的机器指令,如下表所示。
4 详细设计4.1 各条指令的详细设计4.1.1 公操作从控制台强制执行流程,开始运行微程序。
对运行微程序来说,所有的子流程都要运行取指的公操作,然后才能进行各自的操作。
1.(1)打开PC-B ,将PC 中的数据(指令操作码地址)送到总线上; (2)打开LDAR 将数据从总线流到AR 中; (3)打开LDPC ,让自动加1的数据进入PC 中。
2.(1)打开CE 、WE 置成00状态,对主存进行读操作,访问AR 中保存地址的地址单元中指令;(2)打开LDIR ,将主存中被访问的地址单元中指令送到IR ; (3)选中P(1),根据刚保存到IR 中的指令,通过指令译码器,形成执行该指令的微程序入口地址。
4.1.2 IN 指令操作完成公操作后,根据形成的入口地址运行IN 指令操作。
(1)打开SW-B,将“INPUT DEVICE”中输入的数据流到总线上;(2)打开LDRi,根据IN指令的后两位决定让数据从总线上进入到哪个目的寄存器Rd中。
4.1.3 LOAD指令操作完成公操作后,根据形成的入口地址运行LOAD指令操作。
1.0 0 0 0 0 0NULL(1)打开PC-B,将PC中的数据(指令地址码地址)送到总线上;(2)打开LDAR将数据从总线流到AR中;(3)打开LDPC,让自动加1的数据进入PC中。
2.S3 S2 S1 S0 M CN0 0 0 0 0 0NULL(1)打开CE、WE置成00状态,将数据(指令地址码)从主存送到总线上;(2)打开LDAR将数据从总线流到AR中。
3.(1)将该地址下的数据存入R0中。
4. 将R0寄存器中的数据存入RD1锁存器。
5. 将数据在LED 中显示出来。
4.1.4 MOV 指令操作完成公操作后,根据形成的入口地址运行MOV 指令操作。
(1)打开RS-B ,根据MOV 指令的I3、I2决定打开哪个原始寄存器Rs 输出门让其中保存的数据,流到总线上;(2)打开LDRi ,根据指令的后两位决定打开哪个目的寄存器Rd输入门,让数据从总线上进入到哪个Rd 中。
4.1.5 ADD 指令操作完成公操作后,根据形成的入口地址运行SUB 指令操作。
1.(1)打开PC-B ,将PC 中的数据(指令地址码地址)送到总 线上;(2)打开LDAR 将数据从总线流到AR 中; (3)打开LDPC ,让自动加1的数据进入PC 中。
2.(1)打开CE 、WE 置成00状态,将数据(指令地址码)从 主存送到总线上;(2)打开LDAR将数据从总线流到AR中。
3.(1)打开CE、WE置成00状态,根据AR中保存的指令地址码,在主存相同地址单元中,读出其中保存的操作数,并放置到总线上;(2)打开LDDR2将数据从总线流到DR2中。
4.(1)打开RS-B,根据MOV指令的I3、I2决定打开哪个原始寄存Rs输出门让其中保存的操作数,流到总线上;(2)打开LDDR1,让操作数经由总线进入到DR1中。
5.(1)将ALU的控制端S3~CN置成F=A+B,对两数进行运算,打开ALU-B将运算结果送到总线上;(2)打开LDRi,根据指令的后两位决定打开哪个目的寄存器Rd的输入门,让数据从总线上进入到哪个Rd中。
4.1.6 AND指令操作完成公操作后,根据形成的入口地址运行AND指令操作。