分布式半实物仿真平台设计
一种基于虚拟现实技术的分布式半实物仿真平台研究和实现

第13卷第3期系统仿真学报 Volume 13 Number 3 2001年5月JOURNAL OF SYSTEM SIMULATION May 2001 文章编号南京邮电学院计算机科学与技术系 摘 要采用了虚拟现实技术首先确定了该平台的功能和目标提出了面向对象的仿真系统软件开发模式最后对涉及到的关键技术进行了阐述在这个平台上关键词TP391.9 文献标识码NUPTAfter discussion of some shortages of the simulation languages and software, this paper provides o ne distributed semsim(semi-physical simulation) platform based on virtual reality. According to the target of this platform, some research work is introduced, including the architecture of this platform, the object-oriented development model, the steps of simulation and some key technologies. Making full use of the software tools that the well-known software corps provide, we can develop a distributed semsim system fast and flexibly. Our test system also proved so.Keywordsϵͳ·ÂÕæÒòΪ¿ÉÒÔ½â¾ö¶Ô¸´ÔÓϵͳµÄÔ¤²â·ÖÎöºÍÐÔÄÜÆÀ¼ÛµÈÎÊÌâÈçÉú²ú¹ÜÀí¹úÃñ¾-¼Ã“仿真是一个基于模型的活动”ϵͳ·ÂÕæ¼¼ÊõÑо¿Ö÷Òª¼¯ÖÐÔÚϵͳģÐÍÃèÊöϵͳģÐÍÃèÊöÖ÷Òª²àÖØÓÚ¶Ô¸÷ÖÖÄ£ÐÍÃèÊö·½·¨µÄÑо¿ÎÒÃÇ¿ÉÒÔÓÃÒ»¸öͨÓü¯ºÏ½á¹¹Ä£ÐÍ来描述一个系统[1]X为输入集为输入段集Y为输出集为输出函数如面向对象技术数据库技术虚拟现实技术等界面美观的仿真收稿日期王绍棣(1942-)教授1991年获江苏省高等学校优秀共产党员称号, 目前研究方向为计算机在通信中的应用并行处理技术和多媒体技术等仿真分析主要将各种先进的理论和方法人工智能等1.2 虚拟现实虚拟现实是一种可以创建和体验虚拟世界的计算机系统通过视觉触觉等作用于用户从根本意义上说但由于当前计算机技术的限制目前虚拟现实技术主要侧重于解决几个方面问题[2](2)三维虚拟声音也制造了一些虚拟现实系统坐舱式虚拟现实系统和沉浸式虚拟现实系统等那就是“虚拟性”¶ø·ÇÏÖʵÊÀ½çÕæʵµÄËõ΢ĿǰÐéÄâÏÖʵ»¹Ö»ÊÇÒ»¸öÆ𲽽׶ζø²àÖØÓÚ¶ÔÏÖʵÊÀ½ç³¡¾°µÄÈýάÐéÄâÖع¹·ÂÕæÈí¼þºÍ·ÂÕæÓïÑÔÊÇÀûÓüÆËã»ú¶Ôϵͳ½øÐзÂ系 统 仿 真 学 报 2001年5月• 382 •真的基础GPSSQ-GERTSIMSCRIPTMatrixx 和MATLAB 等也即传统仿真语言和软件本质上侧重于对公式1的计算机数值求解Application Programming Interface公式1中的Y 输出但这些功能相对较弱一些特殊的仿真领域航空航天等领域要求在仿真过程中分布式控制针对这些传统仿真语言和软件的不足结合近年来发展比较迅速的计算机网络技术3 基于虚拟现实技术的分布式半实物仿真平台3.1 功能和目标“基于虚拟现实技术的分布式半实物仿真平台”¾ÍÊÇÌṩһ¸ö·Ö²¼Ê½¼¯³É·ÂÕæƽ̨һ¸ö²úÆ·»òÕßÒ»¸öʼþËùν°ëʵÎï·ÂÕæ²¢ÔÚ¼ÆËã»úÉϼÓÒÔʵÏÖÓÉÓÚÕⲿ·ÖµÄÊýѧģÐͽ¨Á¢±È½ÏÀ§ÄÑ·ÂÕæµÄʱºò½«ÕâÁ½¸ö²¿·ÖÁ¬½ÓÆðÀ´Íê³É¶ÔÕû¸öϵͳµÄ·ÂÕæÒªÇó¶ÔʵÎïϵͳ½øÐÐ׼ȷµÄÄ£ÐÍÃèÊö实时性ÒªÇó¶Ô·ÂÕæ½á¹ûÓÐÈýά³¡¾°ÏÔʾ分布式ÒªÇó¶ÔÒÑÓвúÆ·ºÍÈí¼þµÄÓлú¼¯³ÉÎÒÃÇͨ¹ý¾ÖÓòÍø°Ñ·ÂÕæϵͳµÄ¸÷¸ö²¿·ÖÁ¬½Ó³ÉÒ»¸ö¼¯³ÉµÄ·ÂÕæ»·¾³ÆäÖпØÖÆÆ÷ÓÉʵÎï¼ÝÊ»²ÕµÈÓë¿ØÖÆÊý¾Ý²É¼¯·þÎñÆ÷Á¬½Ó²¢Í¨¹ý¾ÖÓòÍø·¢ÍùÄ¿±ê·ÂÕæ»ú·ÂÕæ¿ØÖÆÖ÷»úÊÇÕû¸ö·ÂÕæƽ̨µÄ¿ØÖÆÖÐÐÄÐ-µ÷Õû¸ö·ÂÕæ¹ý³Ì²úÉúÕû¸öϵͳµÄ·ÂÕæʱÖÓ²¢°Ñ·ÂÕæÊä³ö½á¹û·¢Íù³¡¾°¿ØÖÆ·þÎñÆ÷Çý¶¯³¡¾°Êý¾Ý½øÐжàͨµÀÈýά³¡¾°ÏÔʾ从图1我们可以发现与传统的仿真平台相比使得仿真系统的结果能够以更加直观便于对仿真结果进行分析我们从面向对象的软件开发方法学出发对象针对图1中半实物仿真平台拓扑结构图如图2这些组件封装了本组件的主要的功能这些接口具有跨过局域网进行网络通信的能力因此这些接口可以在不同的平台上平滑的移植由于采用了组件化技术这大大增强了在此平台上开发不同仿真系统的软件可重用性在对现实世界进行仿真之前首先必须对实物系统进行分析获得实物系统的先验知识和必要的测试数据目标仿真机(AC-104等控制器局域网立体声声效图1 分布式半实物仿真平台的拓扑结构图第13卷第3期 王绍棣等这是形式化建模的主要任务就可以按组件化软件开发模式对实物系统进行仿真建模在仿真建模过程中除了大量使用仿真平台提供的标准功能模块之外在对仿真模型校验无误之后数字仿真是对实物系统中能够用数学关系描述的部分进行数学仿真使得我们能够对数字仿真结果进行直观的观察和分析在数字仿真完全成功之后在对目标仿真机和网络配置后就可以进行半实物仿真因此在仿真过程中需要反复调试在半实物仿真成功后文档工作也是十分必要的使得我们在半实物仿真过程中可以感受到多通道的三维场景显示和立体声等多媒体效果3.4 关键技术的实现3.4.1 软件集成技术考虑到仿真系统开发的复杂性和周期性在系统建模方面我们主要采用了windriver 公司的Matrixx 仿真软件来完成系统的仿真并且能够方便的进行数字仿真在三维场景建模声音仿真中使用Vega 软件可以快速的创建各种实时交互的三维环境SocketÊÇ¿ÉÒÔ±»ÃüÃûºÍÑ°Ö·µÄͨÐŶ˿ÚÎÒÃÇÔÚ¸÷¸ö²¿¼þͨÐŽӿڵÄʵÏÖÉϲÉÓÃÁËÃæÏòÁ¬½ÓµÄSocket·ÂÕæϵͳ¸÷¸ö×é¼þÖ®¼ä½»»»µÄÊý¾Ý¶¼´øÓÐʱ¼ä´Á3.4.3 通用串行总线接口我们采用通用串行总线Universal Serial BusUSB 是一种总线标准扩展方便支持热插拔等特点控制数据采集服务器通过USB 接口完成对控制器数据的实时采集与格式转换3.2节在仿真平台拓扑结构图中我们采用专门的目标仿真机来产生整个系统的仿真时钟但在一些实时性精度要求不是太高的场合我们采用的Matrixx 系统仿真软件提供了基于PC 机的数字仿真环境基于PC 平台来达到一个低精度的实时仿真保证每一个显示通道都能随机并发接入并且在加入后能够在下一显示帧上和其他显示通道保持同步4 实验系统的实现使用这个半实物仿真平台见图4特别的UCB见图4中Matrixx System Build 建模部分图5是控制器采集数据服务器用户界面为了分析这个系统的实时性可信否图3 系统仿真的一般步骤系 统 仿 真 学 报 2001年5月• 384 •的迟延因此我们重点测试本实验仿真系统对网络带宽的要求(可以参照表1)立体声声效SGI VisualWorkstationSGI VisualWorkstation图4 飞机模拟驾驶的仿真系统结构图图5 控制器采集数据服务器用户界面图6 数字仿真结果三维场景显示从表1可以我们发现实时仿真需要总的带宽大致为200Kbyte/sÎÒÃÇʵÑéϵͳµÄ·ÂÕæ½á¹ûÒ²ÏÔʾ表1 实验仿真系统实时仿真对网络带宽的要求 通信双方 交换信息内容交换数据 结构大小 抽样 频率 需要带宽(增加40ÒÔ40个对象为例40 Byte 30 Hz 47.1 场景控制服务器-声效和三维场景显示工作站场景中对象控制信息3个通道40提出了一种基于虚拟现实技术的分布式半实物仿真平台因此在武器对抗参考文献: [1]肖田元, 张燕云, 陈加栋. 系统仿真导论 [M]. 北京2000.[2]陈丹伟, 顾翔, 张灯银, 王汝传. 虚拟现实与VRML [J]. 南京邮电学院学报王涌天电子工业出版社科学出版社2000,(12)5: 429-434. [7] MultiGen-Paradigm, Inc. Vega Programmer’s Guide Version 3.3 for Windows NT [EB/OL]. , 1999 [8]Integrated Systems, Inc. SystemBuild User’s Guide. http://www.isi. com , 1999, 9.参考文献。
工业控制系统信息安全半实物仿真实验平台设计与实现

华中科技大学硕士学位论文摘要近年来,现代工业控制系统逐步发展,引入大量IT技术,如TCP/IP通信协议,通用软硬件等,同时IT技术的安全漏洞也被引入到工业控制系统中。
工业控制系统的漏洞和脆弱性不断增加,安全形势日趋严重。
由于工业控制系统是持续运行生产系统,运行中不允许间断,所以信息安全防护研究工作一般无法直接在运行的系统上展开,故需要融合工业控制系统结构和功能的特点搭建一个适用的仿真实验平台,提供有效的实验验证环境。
在分析研究工业控制系统信息安全以及其仿真实验平台的搭建技术后,本文提出结合真实硬件设备与物理仿真模型的设计方案搭建工业控制系统信息安全半实物仿真实验平台。
半实物仿真实验平台的网络控制部分采用真实设备构成,物理过程仿真模型采用MATLAB软件实现。
在实验室环境下,利用计算机、BeagleBone开发板和基于TMS320F2812的DSP板实现了Modbus TCP/IP监控网络和CAN总线控制网络的搭建,并设计了HMI攻击、控制器/传感器攻击两种攻击实验方法。
最后本文结合田纳西仿真模型,在工业控制系统信息安全半实物仿真实验平台上展开HMI 攻击实验和传感器攻击实验。
关键词:工业控制系统,信息安全,半实物仿真平台,Modbus TCP/IP,CAN总线华中科技大学硕士学位论文AbstractIn recent years, the industrial control systems have a big development, it has being integrated with a large number of IT technologies, such as TCP/IP protocol, Windows operate system etc. However, IT technologies not only bring benefits to industrial control systems but also cyber-threats. Industrial control systems are growing vulnerable and fragile. The security situation is worsening. Since the industrial control systems are continuous operation systems, research works and testing can’t be performed directly in the running systems. So building a simulation platform of industrial control system is an important means to study the security of industrial control systems.Based on the analysis of the security of industrial control systems and the technology used to build a simulation platform for the security of industrial control systems, this thesis proposes a design of a hardware-in-the-loop simulation platform integrated with real hardware devices and a physical plant simulation model. The network control system uses real devices and the physical layer uses a simulation plant. In laboratory, computers, BeagleBone boards and DSP boards based on TMS320F2812 are used to build Modbus TCP/IP network and CAN bus network. Two attack sceneries are designed in this thesis, they are HMI attack and controller/sensor attack. In the last part of the thesis, the Tennessee-Eastman simulation model is used to test the HLP simulation platform with HMI attack experiment and pressure sensor attack experiment.Keywords: Industrial Control System; Cyber Security; Hardware-in-the-Loop; Modbus TCP/IP; CAN bus华中科技大学硕士学位论文目录摘要 (I)Abstract (II)1 绪论1.1 选题背景及意义 (1)1.2 国内外研究现状 (2)1.3 论文结构及研究内容 (5)2 工业控制系统信息安全仿真实验平台需求分析与总体设计2.1 工业控制系统信息安全分析 (6)2.2 工业控制系统信息安全仿真实验平台需求 (8)2.3 工业控制系统信息安全仿真实验平台总体设计 (9)2.4 本章小结 (12)3半实物仿真实验平台控制网络的详细设计与实现3.1 半实物仿真实验平台控制网络结构设计 (13)3.2 过程监控层网络实现 (14)3.3 现场控制网络实现 (20)3.4 现场控制层信息安全防护框架详细设计 (26)3.5 本章小结 (28)4 基于MATLAB的仿真模型框架构建及系统攻击实验设计华中科技大学硕士学位论文4.1 基于MATLAB的仿真模型框架构建 (29)4.2 半实物仿真平台攻击模拟实验设计 (31)4.3 本章小结 (34)5工业控制系统信息安全半实物仿真实验平台的应用与测试5.1 田纳西仿真模型 (35)5.2 攻击模拟实验 (38)5.3 本章小结 (44)6总结和展望6.1 工作总结 (45)6.2 研究展望 (45)致谢 (47)参考文献 (48)附录1 (攻读学位期间发表的论文) (52)华中科技大学硕士学位论文1 绪论1.1 选题背景及意义现代工业控制系统引入大量IT技术形成集控制、调度、管理和经营为一体的新自动化控制系统,然而IT领域的信息安全风险同时也被引入到工业领域中。
面向案例化教学的半实物仿真系统设计
面向案例化教学的半实物仿真系统设计随着教育的不断发展,在案例化教学模式下,为学生提供真实的学习环境和情境显得越来越重要。
为此,设计一款半实物仿真系统,旨在为案例化教学提供更加真实、直观的学习体验。
本系统将结合不同领域的案例,模拟实际情境,为学生创造一个互动、动态的学习环境,激发学生的学习兴趣和动力。
系统整体设计思路如下:1. 系统硬件设备系统硬件设备包括触屏显示器、操控器和模拟实物。
触屏显示器支持多点触控,可以实现更加直观的界面交互;操控器用于模拟实物操作,例如控制机器人的运动;模拟实物则是为了提供更加真实的学习体验,例如模拟汽车驾驶座椅,让学生在仿真环境中学习驾驶技巧。
系统软件设计包括两个主要模块:场景模拟和学习管理。
(1) 场景模拟场景模拟是本系统的核心部分。
通过模拟实际情境,为学生提供真实的学习环境。
场景模拟包括各种储备案例,例如汽车驾驶、机器人控制、医疗护理等。
在仿真环境中,学生可以亲自操作模拟实物,与计算机程序进行交互,并观察实验结果。
(2) 学习管理学习管理是本系统的另一个模块,用于管理学生的学习过程和成果。
学习管理包括选课系统、学习记录、学习评估等。
选课系统为学生提供多种案例选择,学生可以根据自己的兴趣和需要选择相应的案例。
学习记录用于记录学生的学习过程和成果,便于教师进行后续的教学指导。
学习评估用于测评学生的学习成果,评估结果将被用于学生的分数评定和教师的教学效果评估。
3. 系统优势本系统的优势主要体现在以下几个方面:(1) 仿真实物交互更加直观,学生可以亲身体验和掌握相关技能。
(2) 案例分享功能,学生可以通过网络平台分享自己的学习经验和成果,促进学生之间的相互学习和竞争。
(3) 学习过程记录,便于教师为学生提供个性化的教学指导和评价。
(4) 学习评估系统,可以客观评估学生的学习效果,并为个性化教学提供依据。
综上所述,本系统的设计旨在为案例化教学模式提供更加真实、直观和个性化的学习体验。
分布式虚拟现实平台设计与构建

分布式虚拟现实平台设计与构建虚拟现实技术的快速发展已经改变了人们对于交互体验的认知。
分布式虚拟现实平台的设计与构建为用户提供了更加真实和沉浸式的交互体验,使得用户能够在虚拟世界中感受到与现实世界相似的互动和感知。
本文将对分布式虚拟现实平台的设计与构建进行详细介绍。
首先,分布式虚拟现实平台的设计需要考虑多个方面的需求和挑战。
首先是网络和通信技术的支持。
分布式虚拟现实平台需要能够支持多用户同时的交互和沟通,而这需要高速的网络连接和低延迟的数据传输。
因此,选择合适的网络架构和通信协议非常重要,如客户端-服务器模型或者对等网络模型。
其次,平台的硬件设备也需要考虑。
虚拟现实头显设备、追踪器、手柄等硬件设备是实现分布式虚拟现实的关键。
这些设备需要能够准确地追踪用户的动作和位置,以便用户可以在虚拟世界中进行自由移动和交互。
因此,选择高质量的硬件设备,并将其与平台的软件进行兼容性测试,确保系统的稳定性和流畅性。
第三,平台的软件方面也需要进行设计和构建。
虚拟现实的应用程序需要能够充分利用硬件设备的功能,实现高度真实和沉浸式的交互体验。
此外,平台的软件还需要支持多用户的并发访问和协同工作,以便用户之间可以进行实时的交流和合作。
因此,开发虚拟现实应用程序的开发者需要掌握相关的编程技术,如Unity引擎、Unreal引擎等。
第四,分布式虚拟现实平台的安全性也需要重视。
虚拟现实应用程序可能需要访问用户的个人信息和敏感数据,因此平台的设计需要确保数据传输的安全性和隐私保护。
通过使用加密技术、访问控制和身份验证等手段来确保用户数据的安全,防止恶意攻击和数据泄露。
最后,分布式虚拟现实平台的用户体验至关重要。
为了提供良好的用户体验,平台应该注重界面友好性和操作便捷性。
设计者需要考虑用户在虚拟环境中的操作手势、使用习惯和认知需求,提供更加直观和自然的交互方式。
平台还可以通过添加音频和触觉反馈等技术,增强用户的沉浸感和参与感。
在设计和构建分布式虚拟现实平台时,需要严格按照相关标准和规范进行操作。
分布式半实物仿真平台的网络设计

分布式半实物仿真平台的网络设计
尹丽萍;毛征;尹志新;魏福领;王亚丽
【期刊名称】《系统仿真学报》
【年(卷),期】2008(20)24
【摘要】针对自行高炮光电火控系统的特点,提出了一种分布式半实物仿真平台的网络设计方法。
该方法增强了系统的通用性和可扩展性,使仿真平台可以灵活地增减和修改相应的软硬件模块。
同时,通过改进UDP数据传输协议,采用多线程同步技术以及引入多媒体定时器,来确保系统仿真的可靠性和实时性。
【总页数】5页(P6862-6865)
【作者】尹丽萍;毛征;尹志新;魏福领;王亚丽
【作者单位】北京工业大学电子信息与控制工程学院
【正文语种】中文
【中图分类】TP391
【相关文献】
1.网络化试飞测试系统半实物仿真平台开发设计
2.列车网络控制系统半实物仿真平台设计及应用
3.半实物网络控制系统仿真平台设计
4.分布式半实物仿真平台设计
5.基于MVB列车网络控制系统的半实物仿真平台设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
基于分布式系统的虚拟仿真平台设计与实现
基于分布式系统的虚拟仿真平台设计与实现面临着市场需求不断增长、模拟规模与精度不断提高等挑战,分布式系统已成为虚拟仿真平台的一种重要实现方式。
本文将介绍基于分布式系统的虚拟仿真平台设计与实现。
一、背景虚拟仿真已成为工业制造、军事训练、城市规划等领域的重要技术手段。
虚拟仿真技术通过模拟真实场景、真实环境下的物理、化学、生物等过程,可以帮助人们更好地理解和把握真实世界中的现象、规律和问题。
虚拟仿真技术的应用可以降低安全事故风险、提高工作效率、节省资源开支、减少对环境的影响等。
为了更好地满足市场的需求,对虚拟仿真技术的规模和精度提出了更高的要求,同时,也对虚拟仿真平台的性能和可靠性提出了更高的要求。
二、分布式系统分布式系统是指由多个自治计算机组成的系统。
计算机之间通过网络进行通信和协作,共同完成一项或多项任务。
由于分布式系统中包含了多个计算机,因此可以共享资源、均摊负载、提高系统可靠性、提高系统的可扩展性等。
同时,分布式系统也面临着通信开销、数据同步、系统调试等问题。
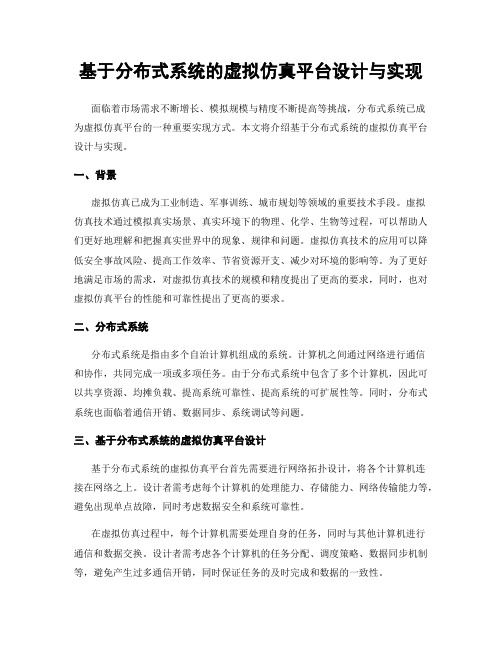
三、基于分布式系统的虚拟仿真平台设计基于分布式系统的虚拟仿真平台首先需要进行网络拓扑设计,将各个计算机连接在网络之上。
设计者需考虑每个计算机的处理能力、存储能力、网络传输能力等,避免出现单点故障,同时考虑数据安全和系统可靠性。
在虚拟仿真过程中,每个计算机需要处理自身的任务,同时与其他计算机进行通信和数据交换。
设计者需考虑各个计算机的任务分配、调度策略、数据同步机制等,避免产生过多通信开销,同时保证任务的及时完成和数据的一致性。
在虚拟仿真平台的功能设计中,设计者需要考虑各种仿真模型的建立和应用、数据可视化和交互性、用户管理和权限控制、平台监控等问题。
所有的这些功能模块都需要考虑分布式系统中的特点,保证系统的性能和可靠性。
四、实际应用基于分布式系统的虚拟仿真平台已经在生产制造、军事训练、城市规划等领域得到了广泛应用。
例如,在制造领域,基于分布式系统的虚拟仿真平台可以帮助企业优化产品设计、提高工艺流程、降低生产成本和增加生产效率;在军事演习中,可以实现不同区域的协同作战、虚拟作战场景恢复、虚拟兵棋推演等;在城市规划中,可以进行不同方案的比较、模拟城市交通流量、优化城市规划等。
面向分布式仿真的云计算平台设计

面向分布式仿真的云计算平台设计随着计算机技术的不断发展,仿真技术在科学研究、工程设计、产品开发等领域中得到越来越广泛的应用。
而云计算技术的出现,则为仿真技术的应用带来了新的可能性。
面向分布式仿真的云计算平台,将成为未来仿真技术的发展趋势。
一、云计算技术对仿真应用的影响云计算技术是一种计算机资源共享的方式,通过将资源汇集在一起,为用户提供强大的计算能力和存储空间。
对于仿真技术而言,云计算平台可以提供分布式计算的支持,使仿真任务可以更高效地完成。
此外,云计算平台的灵活性、可扩展性和安全性等方面,也能够帮助仿真应用更好地实现。
二、分布式仿真的概念和优势分布式仿真是一种仿真技术,它将仿真任务分布在多个计算资源之间,并在这些资源之间共享数据和输出结果。
与传统的集中式仿真相比,分布式仿真具有以下几点优势:1. 分布式仿真可以更高效地利用计算资源。
2. 分布式仿真可以降低仿真任务的计算负载,提升仿真效率。
3. 分布式仿真可以处理更大的仿真规模,使仿真结果更加准确。
4. 分布式仿真可以提高仿真应用的可靠性和安全性。
三、面向分布式仿真的云计算平台设计方案面向分布式仿真的云计算平台设计方案应当包括以下几个方面:1. 计算资源管理在云计算平台中,对于计算资源的管理至关重要。
在面向分布式仿真的云计算平台中,计算资源应当根据其性能、可用性、位置等因素进行分配和管理,以确保仿真任务的高效完成。
2. 数据管理数据在仿真过程中扮演着至关重要的角色,因此对于仿真数据的管理也就显得尤为重要。
在面向分布式仿真的云计算平台中,数据应当采用分布式存储和管理的方式,以便不同计算节点之间能够自由地共享数据。
3. 任务调度任务调度是仿真过程中的核心问题之一,它决定了计算资源的使用效率和仿真任务的完成时间。
在面向分布式仿真的云计算平台中,任务调度应当根据计算资源的空闲情况、仿真任务的优先级、数据共享情况等因素进行调度。
4. 安全管理仿真应用往往涉及到敏感信息和重要数据,因此在面向分布式仿真的云计算平台中,安全管理也就显得十分重要。
面向案例化教学的半实物仿真系统设计

面向案例化教学的半实物仿真系统设计随着教育技术的不断发展,半实物仿真教学系统逐渐成为一种重要的教学手段。
此类系统通过使用虚拟和实物相结合的方法,使学生能够在真实的场景中进行操作和实践,提高教育效果。
本文将对面向案例化教学的半实物仿真系统进行设计,探讨其中的关键要素和实施方法。
面向案例化教学的半实物仿真系统的设计需要明确教学目标和案例需求。
教学目标可以是通过解决不同场景的实际问题来培养学生的综合应用能力和创新思维。
案例需求可以是真实生活中常见的问题,例如物流配送、产品设计等。
系统设计需要包括虚拟环境和实物操作两个方面。
虚拟环境可以通过计算机软件模拟出真实场景,例如使用3D建模技术构建一个生产线模型。
实物操作可以通过安装传感器和执行器等硬件设备,使学生能够进行真实的操作和实验。
在案例化教学中,学生需要面对不同的情景和问题。
系统设计中需要包括多个案例和相应的教学资源。
每个案例可以包括背景知识、问题描述、解决方案等内容。
教学资源可以是文本材料、实验视频、教学课程等,旨在帮助学生理解问题和解决方案。
设计中还需要考虑学生的学习评估和反馈机制。
学习评估可以通过自动化测试、作业习题等方式进行,以评估学生对案例的理解和应用能力。
反馈机制可以通过教师批改作业、学生自主反思等方式实施,以帮助学生提高学习效果。
在实施时,需要提供系统的培训和支持。
教师和学生需要熟悉系统的操作方法和使用技巧。
教师需要指导学生如何有效地利用系统进行学习和实践。
面向案例化教学的半实物仿真系统设计需要考虑教学目标和案例需求、包括虚拟环境和实物操作、提供多个案例和教学资源、设立学习评估和反馈机制,并提供培训和支持。
通过合理的设计和实施,该系统将能够提高学生的学习效果和能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分布式半实物仿真平台设计
刘玉军1 , 陈 坤1 , 那 娜1 , 蔡 猛1 , 刘雪玲2
( ) 1. 装甲兵工程学院 信息工程系 , 北京 1 0 0 0 7 2;2. 飞控中心 , 北京 1 0 0 7 2 0
摘 要 : 针对分散在不同地点部队进行联合训练的问题 , 分析了指控通信 系 统 分 布 式 仿 真 训 练 的 需 求 , 提 出 了 仿 真 平 台 的 设计目标 , 设计了分布式仿真引擎 , 实现了指控通信系统分布式仿真 训 练 平 台 , 红 蓝 双 方 在 仿 真 平 台 上 进 行 对 抗 训 练 , 在 同一交战空间中体验复杂电磁环境下 的 指 控 通 信 效 果 。 为 了 验 证 仿 真 平 台 的 可 信 度 , 以 平 台 综 合 业 务 承 载 能 力 为 评 价 对 象 , 建立评估指标体系 , 以模糊评判法对平台进行了定性评估 。 关键词 : 指控系统 ; 分布式仿真 ; 仿真引擎 ; 半实物模拟器 ; 效能评估 )1 中图法分类号 : T P 3 9 1 . 9 文献标识号 :A 文章编号 : 1 0 0 0 7 0 2 4( 2 0 1 2 2 4 6 8 6 0 5 - - -
2 0 1 2年1 2月 第3 3卷 第1 2期
计算机工程与设计
C OMP UT E R E NG I N E E R I NG AN D D E S I GN
D e c . 2 0 1 2 V o l . 3 ; 1.D e a r t m e n t o f I n f o r m a t i o n E n i n e e r i n c a d e m o f A r m o r e d F o r c e E n i n e e r i n B e i i n 1 0 0 0 7 2, C h i n a p g g y g g j g , ) 2.A e r o s a c e C o n t r o l C e n t e r B e i i n 1 0 0 7 2 0, C h i n a p j g
s i m u l a t i o n D e s i n o f d i s t r i b u t e d a n d s e m i h s i c a l l a t f o r m -p g y p
1 1 1 1 2 , ,NA , L I U Y u u n CHE N K u n N a C A I M e n L I U X u e l i n - - j g, g