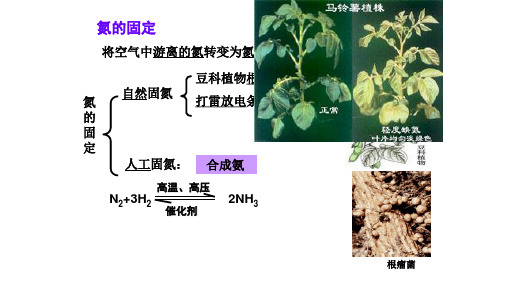
第四章 实用计算方法1
人教版高中化学必修一第四章第四节氨硝酸硫酸
(3)若V L烧瓶充满标况下的氨气,喷泉实验后溶液充满
整个烧瓶,所得溶液的物质的量浓度是
1 22.4
。mol/L
2、氨气的化学性质 (1)氨与水反应
NH3+H2O
NH3 H2O
NH4++OH-
关于氨水——氨的水溶液
① 氨水中含有的主要微粒有:
分子:H2O、NH3、NH3•H2O 离子:NH4+、OH注意:计算氨水的质量分数时,以NH3为溶质。 ② 氨水密度小于水(氨水浓度越大,密度越小)
③ NH3•H2O不稳定
△
NH3•H2O == NH3+ H2O
氨水是一种不稳定、易挥发的一元弱碱
讨论1:在1L 1mol/L的氨水中( D ) A、含有1mol NH3 B、含NH3和NH4+的物质的量之和为1mol C、含1mol NH3• H2O D、含NH3、 NH3• H2O和NH4+的物质的量之和为1mol
注意:NH4Cl受热分解,产生的气体冷却又生成NH4Cl,
NH4HCO3 NH3↑+H2O+CO2↑
都产生NH3,
△
非氧化还原反应
(NH4)2CO3 = 2NH3 ↑ + H2O + CO2 ↑
2NH4NO3△= 4H2O + 2N2 ↑ +O2 ↑ 无NH3产生,是氧化还原反应 注意:不是所有的铵盐受热分解都生成氨气。
保存:硝酸盛放于棕色瓶中,置于冷暗处
2、强氧化性
浓氨水 CaO
讨论2:通常情况下能大量共存,并且都能用浓硫酸和碱石灰
干燥的是( B )
A、NH3、NO、HCl C、H2S、SO2、O2
B、N2、H2、O2 D、NO、NO2、O2
第四章第1、2、3、4、5节N
第四章 拉深
特点: 1.反拉深时变形集中在rd区,与rd区包角为1800,摩擦阻力比正 拉深时大,不易起皱,常可不用压边。 2.折弯要减少一半。材料硬化程度要比正拉深时低些。 3.反拉深允许变形程度可大些。 4.拉深系数不能太大。影响凹模壁厚。
结束
第四章 拉深
三、凹模圆角区摩擦对 的影响 将板料流经、区视为皮带绕带轮旋转,便可用欧拉张力公式 进行估算。
第四章 拉深
四、材料硬化对 的影响 当考虑材料硬化对筒壁处拉应力的影响时, 应为瞬时的屈服流动应力。 便不是常数,
缩颈点处断面收缩率 材料,硬化也越强烈,
,越大的
应力的最大值一般出现在板料包满凸模和凹模 圆角时,而这时材料已高度硬化,屈服流动应 力已远远超过其初始值。
第四章 拉深
第三节 影响径向拉应力的因素
一、压边对 的影晌 凸缘区板料在流入凹模过程中将受到压边圈与凹模端面的双重 摩擦阻力作用,使筒壁处拉应力增大
为筒壁截面积的近似值。
第四章 拉深
二、凹模圆角区弯矩对 的影响 处在位置1是平直的,进入rd区被弯曲,中心面曲率半径为R。位 置3,又被反弯拉直。凸缘区板料中被反复两次弯曲。
第四章 拉深
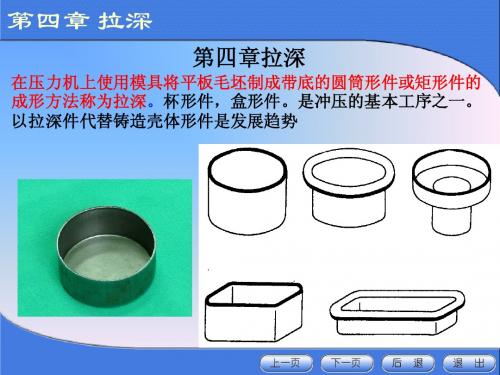
第四章拉深
在压力机上使用模具将平板毛坯制成带底的圆筒形件或矩形件的 成形方法称为拉深。杯形件,盒形件。是冲压的基本工序之一。 以拉深件代替铸造壳体形件是发展趋势
第四章 拉深
第四章 拉深
第一节圆筒形件拉深变形分析
一、拉深变形过程及变形特点 无压边的拉深过程,有压边的拉深。
第四章 拉深工艺与拉深模设计
第四章 拉深
变形特点:变形区主要 集中在凸缘区,即D与d 之间的环形部分。变形 区任一点在径向受到了 拉伸,而切向受到了压 缩。同一圆周上的各点 的切向压缩变形是相等 的。径向变形不具有均 匀性,越靠近凸缘边缘, 径向拉伸变形与切 拉深
第四章 地下建筑结构的计算方法
Q系统分级与分级系数的关系
RQD J r J w Q= ⋅ ⋅ J n J a SRF
岩体质量分级
岩体 质量 特别 好
极好
良好
好
中等
不良
坏
极坏
特别坏
Q值
1000 ~400
400~ 100
100~ 40
40~ 10
10~ 4
4~1
1~ 0.1
0.1~ 0.01
0.01~ 0.001
Q系统分级的应用
3
§2工程类比法
隧道各级围岩自稳能力判断
自稳能力 围岩级别 Ⅰ Ⅱ 跨度20m,可长期稳定,偶有掉块,无塌方 跨度10m ~20m,,可基本稳定,局部可发生掉块或小塌方; 跨度10m,可长期稳定,偶有掉块; 跨度10 ~20m,可稳定数日至1个月,可发生小~中塌方; 跨度5 ~10m,可稳定数月,可发生局部块体位移及小~中塌方 跨度5m,可基本稳定
18
§5 收敛限制法 5
收敛线概念: 收敛线概念: 据地层及洞室情况可有弹性、塑性、 据地层及洞室情况可有弹性、塑性、松动等三 段。 限制线概念: 限制线概念:
支护时间和结构刚度的 合理选择: 合理选择:(图 )
19
§5 收敛限制法 5
收敛线的确定: 收敛线的确定: 解析法, 解析法,难,不同部位的收敛线不一样; 不同部位的收敛线不一样; 有限元方法; 有限元方法; 现场实测法 限制线的确定:与上类似 限制线的确定:
Ⅲ
Ⅳ
跨度5m,一般无自稳能力,数日至数月内可发生松动变形、小塌方,进而发展 为中~大塌方。 埋深小时,以拱部松动破坏为主,埋深大时,有明显塑性流动变形和挤压破坏 跨度小于5m,可稳定数日至1个月 无自稳能力,跨度5m或更小时,可稳定数日 无自稳能力
七年级数学第四章 直线与角 第1~3节上科版知识精讲
七年级数学第四章 直线与角 第1~3节上科版【本讲教育信息】一. 教学内容:第四章:直线与角 4. 1 多彩的几何图形 4. 2 线段、射线、直线 4. 3 线段的长短比较二. 教学目标1. 通过实例,识别常见的几何体:长方体、正方体、四面体、圆柱、圆锥、球等.2. 了解几何图形是由点、线、面、体组成的,并能了解什么样的图形是平面图形,什么样的图形是立体图形。
3. 掌握立体图形与平面图形的关系,能根据展开图说出立体图形的名称.4. 掌握由立体图形画出该图形的各方向的平面观察图,反过来,由平面观察图说出立体图形的名称或描述立体图形.5. 学会如何标记线段、射线、直线,体会三者之间的关系.6. 通过实例认真体会两点确定一条直线的事实。
7. 学会比较两条线段的长短,理解线段中点的定义,并学会将文字语言转化为符号语言(由点C 是AB 的中点,得到AC =CB =21AB 或AB =2AC =2CB ). 8. 依据具体的实例,体会并掌握线段的性质:两点之间的所有连线中,线段最短;掌握两点间距离的定义。
三. 重点及难点 重点:1. 点、线、面、体的概念。
2. 会画并能识别立体图形及一些简单组合体的“三视”图3. 线段、射线、直线的概念及直线的两条性质。
4. 线段长短的比较方法和线段的基本性质。
难点:1. 点、线、面、体之间的关系2. 直线的两条性质的理解与应用。
3. 线段的基本性质“两点之间的所有连线中,线段最短”的理解与应用。
四. 课堂教学知识要点1. 几何图形:几何图形就是指物体的形状大小和位置,长方体、四面体、圆柱、圆锥、球等都是几何体,简称体。
包围着体的是面,面可以为平面,曲面两种。
几何体中,面与面相交形成线,线与线相交得到点。
↓↖↗↘↙线线线线↙↙面面面面↖↖几何图形是由点、线、面、体组成。
点是最基本的图形点,线,面,体之间的关系是:点动成线,线动成面,面动成体。
平面没有边界,几何图形中,像直线,角,三角形,圆等,它们上面的各点都在同一个平面内,这样的图形叫做平面图形;像长方体,圆柱体,球等,它们上面的各点不都在同一个平面内,这样的图形叫做立体图形。
机械系统动力学 第四章 固有频率的实用计算方法
第4章 固有频率的实用计算方法
二、邓克利法(Dunkenley法)
对于多自由度振动系统,若用柔度法建立的运动微分 方程可表示为:
X MX
同样地令 X {u}sinnt
4-2-8
(I 2 M)u 0
I 2 M 0
特征方程
对于二个自由度系统:
1-211m1 -212m2 0 -221m1 1-222m2
若取 u1
{1
{u1}T {u1}T
K{u1} M {u1}
=
{1
1} k m
1} 0
k
1
0 1 2m 1
1 2 代入式4-2-7进行试算
k 0.定 于对振型的假设。计算 一阶固有频率精度较高
2k k 1
但数值偏大
若取
{1
2 n1
{u1}T {u1}T
K{u1} M {u1}
第4章 固有频率的实用计算方法
4-1 单自由度系统 一. 列方程法
单自由度无阻尼自由振动系统运动
mx kx 0
只要列出单自由度无阻尼自由振动系统的运动微分 方程,就可以得到振动系统的固有频率
n
k m
第4章 固有频率的实用计算方法
4-1 单自由度系统 一. 列方程法
例4-1-1:建立图4-1-1(a)所示的均质杆绕O点作微幅转 动振动系统的运动微分方程。
振动系统固有频率:
n
ka2 Jo
ka2 1 ml3 3
3ka2 ml 3
第4章 固有频率的实用计算方法
4-1 单自由度系统
二.能量法
原理:
对于单自由度无阻尼自由振动系统,其响应为简谐振
动位,置系,统势能T 为U0,c动ons能t 达或到最ddt大(T,U即) :0U
化工设备机械基础4

钢板的2--2和3--3面为危险面 3P 3 ×110 σ2 = = ×107 = 155.7MPa ≤ [σ ] 4t(b − 2d ) 4 × (8.5 − 2 ×1.6) P 110 σ3 = = ×107 = 1594MPa≤ [σ ] 综上,接头安全。 . t(b − d ) 1× (8.5 −1.6) 1 2 3
28
§4-5 纯剪切
剪应力互等定理: 剪应力互等定理:
剪切虎克定律
a dy
γ τ´
dx
τ´
b
∑ mz = 0
τ
c z
τ
d t
τ ⋅ t ⋅ dxdy = τ ′ ⋅ t ⋅ dxdy
故
τ =τ′
上式称为剪应力互等定理 为剪应力互等定理。 为剪应力互等定理 该定理表明:在单元体相互垂直的两个平面上,剪应 在单元体相互垂直的两个平面上, 在单元体相互垂直的两个平面上 力必然成对出现,且数值相等, 力必然成对出现,且数值相等,两者都垂直于两平面的交 其方向则共同指向或共同背离该交线。 线,其方向则共同指向或共同背离该交线。 单元体的四个侧面上只有剪应力而无正应力作用, 单元体的四个侧面上只有剪应力而无正应力作用,这 29 种应力状态称为纯剪切应力状态。 种应力状态称为纯剪切应力状态。
4
P (合力)
§4-1 剪切构件的受力与变形特点
(合力) P n ③剪切面: 剪切面: 构件将发生相互的错动面, 构件将发生相互的错动面,如 n P (合力) n– n 。 ④剪切面上的内力: 剪切面上的内力: 内力 — 剪力Q ,其作用线与 剪力 Q n P
5
剪切面 剪切面平行。 剪切面平行。 n
Q n
6 钢板在受铆钉孔削弱的截面处,应力增大,易在连接处拉断。 钢板在受铆钉孔削弱的截面处,应力增大,易在连接处拉断。
机械系统动力学第四章 固有频率的实用计算方法

1 2 U k ( a ) 系统的势能 2
2
1 22 2 T = J J ( c o st ) = J c o sn t 0 0 0 n 0 0 n 2 2 2
2 n
1 21 21 2 2 2 U =( k a ) k ( a s i n) t = k a s i n t 0 n n 0 2 2 2
解:单自由度系统,取均质杆为研究对象,画其受 力图如图(b)。根据动量矩定理 J MF () o 0
J k a c l o
2 2
第4章 固有频率的实用计算方法
4-1 单自由度系统 一. 列方程法
解:单自由度系统,取均质杆为研究对象,画其受 力图如图(b)。根据动量矩定理 J MF () o 0
2 2 J k a c l o
k a c l 0 即 J o
2 2
振动系统固有频率:
k a2 k a2 3 k a2 n 3 1 Jo m l 3 m l 3
第4章 固有频率的实用计算方法
4-1 单自由度系统
二.能量法 原理: 对于单自由度无阻尼自由振动系统,其响应为简谐振 d (T U ) 0 。在静平衡 动,系统 T Uc o n s t或 dt U 0 ,T T 位置,势能为0,动能达到最大,即: m a x。 在最大位移处,动能为0,势能达到最大, U U ,T 0 即: 。所以有: m a x
1 2 2 最大动能 Tmax = J00 n 2
得:最大势能:1 来自max = ka202 2由
Tmax =Umax
1 2 2 1 2 2 J0 = k a 0 2 0 n 2
第四章(第一次课) 两相流动压降

其中两相摩擦乘子是一些专门定义的系数。
两相摩擦因子
若令流道内流动的总质量流量为W,气相质量流量为Wv,液 相质量流量为Wl,且 W = Wl + Wv 。
⎛ dp f 总质量流量为W的两相混合物的摩擦压降梯度记做 ⎜ ⎜ dz ⎝
⎞ ⎟ ⎟ ⎠TP
其中下标“TP”表示两相
⎝
⎠v
③ 计算无因次参数X,用X查图4-1的曲线或用 φl2 、φ v2 (与 Chisholm的拟合关系式(4-36)计算 α); 2 φl 或 φ v2 计算两相摩擦压降梯度⎛ dp f ⎞ 。 ⎜ ⎜ dz ⎟ ⎟ ④用 ⎝ ⎠
TP
其他方法还有: (2) Martinelli-Nelson关系 (3) Thom方法 (4) Armand-Treshchev关系式
第一课 两相流动压降
上海交通大学 核工系
一、概述
前面我们曾经提到,两相流动的总压降等于 加速、重位与摩擦压降三者之和。在一般情 况下,加速压降与摩擦压降、重位压降相比 很小,往往可以忽略不计。只有在高热负荷 的情况下,加速压降才增大到可与摩擦压降 相比拟的程度。
加速压降
按照分相流模型,从两相流动的动量方程可 知,稳定流动时加速压降为
本次课结束!
⎡ (1 − x )2 x2 1⎤ 2 ∆pa = G ⎢ + − ⎥ ⎣ ρ l (1 − α ) ρ vα ρ l ⎦
若按均相流模型处理,此时,则上式可写为
⎡ ⎛ 1 1 ⎞⎤ ∆p a = G ⎢ x ⎜ − ⎟ ⎥ ⎜ρ ρ l ⎟⎦ ⎠ ⎣ ⎝ v
2
重位压降
动量方程中的重位压力梯度为
dp g dz = ρg sin θ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Tmax Vmax
1 2
ky02
1 2
my02 2
2 k
m
▪ 这个表达式和以前所述的一样,但现在它是从最大变形 能应等于最大动能的Rayleigh法概念而得。
▪ 例子:简支梁,认为是无限自由度
y(x,t) (x)sint
x
m(x), EI (x), l
y x y(x,t)
0
能量守恒: Tmax Vmax
L
L
2 g Z
m( x) ( x)dx
L
0
m( x) ( x)2
dx
g
0
0 m(x)vd (x)dx
L 0
m(
x)
vd
(
x)2
dx
例
W
m EI
▪ 假定变形曲线
L/2
L/2
PL3 3 x 2 L x 3
v(x) 3EI
2 L3
Z0 ( x)
3x2L x3 Z0 2L3
2
120EI m L4
2
4 EI
m L4
97.41EI m L4
▪ 原则上,只要满足梁的几何边界条件,形状函数可任意 选取,亦即形状函数仅需和具体的支承条件一致。
▪ 但是,对不是真实振型的任意形状函数,为了保持平衡 就必须有附加的外部约束作用,这些附加约束将会使体 系变得刚硬,从而使计算频率增大。
m(x) h0 x
I (x) 1 ( h0 x )3 12 l
h(x) x
h0
l
l
设形状函数为
X1(x)
a(1
x )2 l
X1(l) 0, X1(l) 0
满足位移边界条件。
12
l 0
EI[ X1(x)]2 dx
l 0
mX
2 1
(
x)dx
5Eh02
2l4
1
1.581h0 l2
E
精确解为
33 140
mL 2
Z02 2
25 256
W 2g
2
Z
2 0
33 140
25 256
W mLg
mL 2
2
Z02
Vmax
1 2
pZ0
3EI L3
Z02
▪ 计算频率:
2
3
33 25
W
EI m L4
140 256 m Lg
例:试用瑞利法求图示楔形悬臂梁的基本频率。宽度b=1。
解: h(x) h0 x / l
1
1.534h0 l2
E
例:试求图示对称刚架的基本频率。
解:
y1 ( x)
P 156EI
x2 (21l
13x)
2Pl3 39EI
y2 (x)
P 104EI
x(x2
3xl
2l 2 )
P
1.5m 4EI m EI
2l
y2 x x
U max
1 P 2
P 2l 3 39EI
3 Pl 13
柱的最大动能
0
▪ 由Rayleigh法:
L
2
EI (x) "(x) dx
2 0 L
2
0 m(x)(x) dx
→ k* → m*
k* m*
此即为瑞利商
振动形状的选取
例子:简支梁,认为是无限自由度
x
m(x), EI (x), l
y x y(x,t)
假定振型为抛物线:
(x)
x L
1
x L
Vmax
1 2
L EI (x)[ "(x)]2 dx
ml EI
y1
3 Pl 13
T1max
2 12
2
l 0
m
y12
(
x)dx
7 Pl 26
7 Pl 26
m2
l 0
P2 (156EI )2
x4 (21l 13x)2 dx
0.0008772
m P 2l 7 ( EI )2
2Pl3
39EI
y2 (x)
x
P Z0
▪ 最大位能 ▪ 最大动能
Vmax
1 2
pZ0
3EI L3
Z
2 0
TmBax
1 2
L
2
m( x)v( x) dx
0
m 2
Z02 2
L[ ( x)]2 dx
0
33 140
mL 2
Z 02
2
Finish?
TW max
W 2[v(L / 2)]2
2g
25 256
W 2g
2
Z
2 0
Tmax
▪ Rayleigh法计算的频率中,最低的一个,总是最好的近 似值!
Question: 如何确定合理的挠曲形状?
Solution:
▪ 自由振动的位移是由惯性力作用引起的; ▪ 惯性力正比于质量×加速度(质量分布及位移幅值) ▪ 因此:正确的振动形式为正比于m(x)的荷载所引起的挠
曲线。
▪ 再近似: 假定惯性荷载为梁的重量,即 p( x) m( x)g
L
2
120EI m L4
"( x)
2
L2
sin
x
L
1
Vmax 2
L 0
EI
(
x)[
"(
x)]2
dx
1 2
4EI
2L3
Tmax
1 2
Z
2 2
00
L 0
m( x)[
( x)]2 dx
1 2
Z
2 2
00
mL 2
能量守恒:
Vmax Tmax
2
4 EI
m L4
97.41EI m L4
假定振型为抛物线: 假定振型为正弦曲线:
▪ 频率计算将根据静止重量荷载所引起的挠曲线vd(t)进行。 ▪ 此时,体系的变形能必然等于重量荷载所做的功。
注意: (x) vd (x) / Z0
最大变形能:
Vmax
1 2
L 0
p(x)vd
(x)dx
1 2
gZ0
L
m( x) ( x)dx
0
最大动能:
Tmax
1 2
Z02 2
L
2
m(x)(x) dx
▪ 体系变形能:
V 1
L
EI (x)
2 y / x2
2
dx
20
▪ 最大值:
Vmax
1 2
L
EI (x)
0
2(x) / x2
2
dx
x
m(x), EI (x), l
y x y(x,t)
▪ 体系动能:
T 1
L
m(x)
2 y / t2
2
dx
20
▪ 最大值:
Tmax
12
2
L
2
m(x)(x) dx
V
1 2
ky2
1 2
ky02
sin2
t
质量块动能:
T
1 2
my&2
1 2
my02 2
cos2
t
y (t ) m
Vmax
1 2
ky02
Tmax
1 2
my02 2
Vmax
1 2
ky02
Tmax
1 2
my02 2
▪ Rayleigh法的理论基础为能量守恒定律。即认为如果没 有阻尼力消耗能量的话,在自由振动体系中,能量应该 保持常量。
0
Tmax
1 2
02
L m(x)[(x)]2 dx
0
"(
x)
2 L2
1 4EI 2 L3
1 2
02
mL 30
Vmax
1 2
L EI (x)[ "(x)]2 dx 1 4EI
0
2 L3
Tmax
1 2
02
L 0
m(
x)[
(
x)]2
dx
1 2
02
mL ax
假定振型为正弦曲线: (x) sin x
第四章 实用计算方法
1
第四章实用计算方法
§4.1能量法求自振频率 §4.2矩阵特征值问题及解法 §4.3结构动力响应的数值解法
2
§ 4.1 能量法求自振频率
一、瑞利能量法
c
自振频率:
k* m*
k
自由振动位移: 自由振动速度: 弹簧变形能:
y(t) y0 sin t y&(t) y0 cost