基于CAN的数据采集系统设计
基于CAN总线改进的机车数据采集系统
第3 6卷
第 5期
航 空 计 算 技 术
A r n u ia o ui g T c n q e e o a t lC mp t e h i u c n
Vo . 6 No 5 I3 . S p20 e .0 6
20 0 6年 9月
采用 X 54 。X 54 … 是美 国 Xcr 司生产 的 E — 205 20 5 i 公 o E
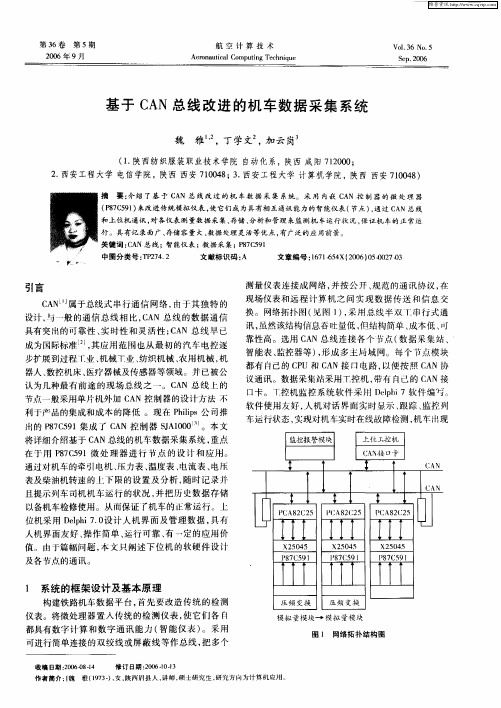
度设定为 15 b s通讯介质采用双绞线或同轴 电缆。 2Kp, 节点数设为 6 4个 , 它们是一个数据采集工控机 、 一个 监控报警器 、 个智能表和 8 5 4 个开关量卡。
1 系统的框架设计及基本原 理
构建铁路机车数据平 台, 首先要改造传统 的检测 仪表。将微处理器置入传统 的检测仪表, 使它们各 自 都具有数字计算和数字通讯能力 ( 智能仪表 ) 。采用 可进行简单连接的双绞线或屏蔽线等作总线 , 多个 把
收稿 日期 :060 .4 20 -81 修 订 日期 :0 6 1・3 2 0 ・ i 0
摘 要 : 绍 了 基 于 C N 总 线 改 过 的 机 车 数 据 采 集 系统 。 采 用 内嵌 C N 控 制 器 的 微 处 理 器 介 A A
(8C9 ) P7 5 1 来改进传统模拟仪表 , 它们成 为具有相 互通讯能力 的智能仪表( 使 节点 ) 通过 C N总线 , A 和 上位机通讯 , 对各仪表 测量数 据采集 、 存储 、 分析和 管理 来监 测机车运行状 况 , 保证机 车的正常运 行 。具有记 录面广、 存储 容量 大 、 数据处理灵活等优点 , 有广泛的应用前景。
故障时, 还可 以及时 向司机报警 , 在机车库检时, 系统 还提供检修指导。
最 多节点 数可 达 10个 。本 机 车数 据平 台通 讯 速 1
基于单片机的CAN总线数据采集设计与实现

基于单片机的CAN总线数据采集设计与实现一、背景介绍CAN(Controller Area Network)总线是一种现代化的通信协议,在汽车、工业控制和航空航天等领域得到了广泛的应用。
CAN总线具有高速传输、可靠性强、抗干扰能力强等特点,因此成为了现代化设备控制系统中不可或缺的部分。
基于单片机的CAN总线数据采集设计与实现,则是将单片机与CAN总线相结合,实现对CAN总线上的数据进行采集与处理,为现代化设备控制系统提供了稳定可靠的数据采集手段。
本文将介绍基于单片机的CAN总线数据采集的设计与实现过程。
二、设计原理1. CAN总线基本原理CAN总线是由BOSCH公司在1986年提出的一种串行通信协议,用于解决现代汽车中分布式电子系统的通信问题。
CAN总线采用了差分信号传输、抗干扰能力强、支持多主机通信等特点,因此在汽车电子领域得到了广泛的应用。
CAN总线的基本原理是采用数据帧的方式进行通信,数据帧包括了ID域、数据域、CRC校验等部分,通过CAN总线共享数据,实现了各个节点之间的通信。
在采集数据的过程中,需要对CAN总线上的数据进行解析,以获取需要的数据信息。
2. 单片机与CAN总线的通信单片机与CAN总线的通信可以通过CAN控制器实现,通常采用CAN芯片作为接口。
CAN 芯片负责与CAN总线进行通信,并将数据传输给单片机,单片机利用自身的处理能力对数据进行解析、处理,实现对CAN总线上数据的采集与控制。
在单片机与CAN总线的通信中,需要定义好通信协议,包括数据帧格式、ID定义、数据解析方式等,以确保单片机能够准确地获取需要的数据信息。
三、设计流程基于单片机的CAN总线数据采集设计与实现的流程包括了硬件设计、软件设计与测试验证三个基本环节。
1. 硬件设计硬件设计主要包括了单片机选型、CAN芯片选型、电路连接设计等内容。
在选型时需要考虑单片机的处理能力、通信速率要求、接口协议支持等因素,根据系统的应用场景选择合适的单片机和CAN芯片。
基于CAN的多通道高速数据采集系统设计

基于CAN总线的数据采集与控制系统设计

基于CAN总线的数据采集与控制系统设计郝寿朋;刘瑞玲【摘要】In order to ensure real-time and reliable data transmission, solve the problem that the data is prone to be interfered in the process of data transmission, and ensure the capability of the data acquisition and control system, CAN (controller area network) bus is taken as the fieldbus in the system to realize data transmission. CAN is a kind of serial communication network that supports the distributed control and the real time control, and has the characteristics of high performance and high reliability. The repeated tests for the hardware and software of the system demonstrates the capability of the system, and embodies the obvious advantage of CAN bus in the aspects of the communication capability, reliability, real time, and so on.%为了保证数据传输的实时性、可靠性,解决数据传输过程中易受干扰的问题,并保证数据采集和控制系统的性能.采用CAN总线作为现场总线来实现数据传输.经过对系统软硬件在不同环境下的多次测试,验证了该系统的性能,同时也体现了CAN总线在通信能力、可靠性和实时性等方面的明显优势.【期刊名称】《现代电子技术》【年(卷),期】2011(034)008【总页数】4页(P36-38,42)【关键词】CAN总线;数据采集;控制系统;串行通信【作者】郝寿朋;刘瑞玲【作者单位】中国海洋大学,信息科学与工程学院,山东,青岛,266100;临沂市高级技工学校,山东,临沂,276021【正文语种】中文【中图分类】TN911-340 引言随着计算机网络上的高速发展,使得信息的交流与共享变得空前广泛和自如,而这项技术也渗入到自动化领域的变革当中,现场总线(Fieldbus)由此应运而生,开创了工业控制的新篇章。
基于CAN总线的数据采集记录装置设计
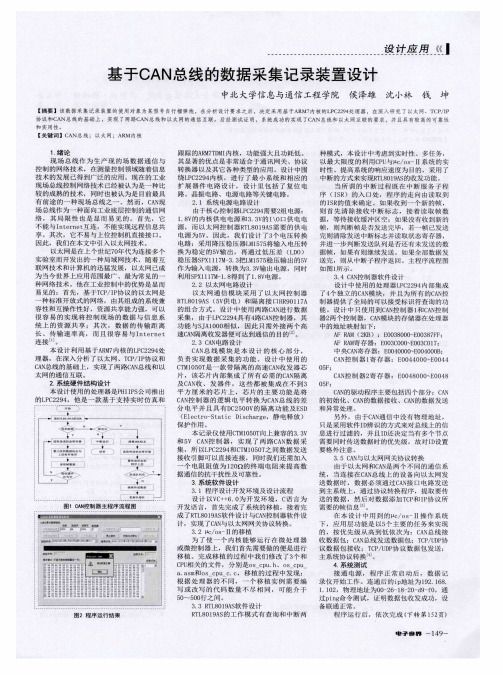
跟 踪的A R M 7 T D M I 内核 . 功 能 强 大 且 功 耗 低 。 其 显 著 的优 点 是 非 常 适 合 于 通 讯 网 关 、协 议 转 换 器 以及 其 它 各 种 类 型 的 应 用 。 设 计 中 围 绕L P C 2 2 9 4 内 核 , 进 行 了最 小 系 统 和 相 应 的 扩 展 器 件 电 路 设 计 , 设 计 里 包 括 了 复 位 电 路 、 晶 振 电路 、 电 源 电路 等 关 键 电 路 。 2 . 1系 统 电源 电 路 设 计 由于 核 心 控 制 器 L P C 2 2 9 4 需要2 组 电源 : 1 . 8 V 的 内核 供 电 电 源 和 3 . 3 V 的I \ O口供 电 电 源 ,而 以太 网控制 器R T L 8 0 1 9 A S 需 要 的 供 电 电源为 5 V 。 因 此 , 我 们 设 计 了3 个 电压 转 换 电路 : 采 用 降 压 稳 压 器 L M 1 5 7 5 将 输 入 电压 转 换 为稳 定的5 V 输 出 ,再 通 过 低 压 差 ( L D O ) 稳压 器S P X 1 1 1 7 M 3 . 3 把L M 1 5 7 5 稳压输 出的5 v 作 为输 入 电源 , 转 换 为 3 . 3 V 输 出 电源 , 同时 利用S P X 1 1 1 7 M 一 1 . 8 得 到了1 . 8 V 电源 。 2 . 2 以 太 网 电路 设 计 以 太 网 通 信 模 块 采 用 了 以 太 网 控 制 器 R T L 8 0 1 9 A S( 5 V 供 电 ) 和 隔 离 接 口H R 9 0 1 1 7 A 的 组合方 式 。设计 中使用 两路 C A N 进 行 数 据 采 集, 由于L P C 2 2 9 4 具有 4 路C A N 控 制 器 , 其 功 能与S J A1 0 0 0 相 似 , 因 此 只 需 外 接 两 个 高 速C A N 隔 离 收 发 器 便 可 达 到通 信 的 目 的 J 。 2 . 3 C A N 电 路 设 计 本设 计利 用基于A R M 7 内核 的L P C 2 2 9 4 处 C A N 总 线 模块 是本 设计 的核 心 部 分 , 理 器 ,在深 入分析 了以太网 、T C P / I P 协议和 负 责实 现 数据 采 集 的功 能 。 设计 中使 用 的 C A N 总 线 的基 础 上 , 实现 了两 路 C A N 总 线 和 以 C T M 1 0 5 0 T 是一 款带 隔离 的高速 C A N q  ̄发 器 芯 太 网的通信互联 。 片 , 该 芯 片 内 部 集 成 了所 有 必 需 的 C A N 隔 离 2 . 系统硬件结构 设计 及C A N q  ̄、 发 器 件 , 这 些 都 被 集 成 在 不 N 3 本 设 计 使 用 的 处 理 器 是P H I I P S 公 司 推 出 平 方 厘 米 的 芯 片 上 , 芯 片 的 主 要 功 能 是 将 的L P C 2 2 9 4 , 他 是 一 款 基 于 支 持 实 时 仿 真 和 C A N 控 制 器的 逻 辑 电平转 换 为C A N 总 线 的 差 分 电平 并且 具有 D C 2 5 0 0 V 的隔 离功 能 及E S D ( E l e c t r o — S t a t i c D i s c h a r g e , 静 电释 放 ) 保护作用 。 本 记 录 仪 使用 C T M 1 0 5 0 T 向上兼容 的3 . 3 V 和5 V C A N 控 制 器 , 实现 了两 路C A N 数 据采 集 ,所 以L P c 2 2 9 4 和c T M 1 0 5 0 T 之 间 数据发送 接收 引脚 可 以直接连 接, 同时我 们还 需加入 个 电 阻阻值 为 1 2 O Q的终端 电阻来提 高数 据 通 信 的抗 干 扰 性 及 可 靠 性 。 3 . 系统软 件设计 3 . I程 序 设 计 开 发 环 境 及 设 计 流 程 设 计 以V C + + 6 . 0 为 开 发环 境 ,C 语 言 为 图1 C A N 控 制 器 主 程 序 流 程 图 开 发 语 言 , 首 先 完 成 了 系 统 的移 植 , 接 着 完 成 了R T L 8 0 1 9 A S 软件设 计与C A N 控 制 器 软 件 设 坤 t ■ 触 计 , 实 现 了C A N 与 以 太 网 网 关 协 议转 换 。 ! : j _ l 』 厂 _ _ 一 二 1 3 . 2 g c / o s — I I 的移 植 三 — —二 — - 塑 _ - 黼 耕 ∞ : 2 0 l 1 月{ … l ’ ( ¨ *抑 Ⅲ 为 了使 一 个 内 核 能 够 运 行 在 微 处 理 器 或 微 控 制 器 上 ,我 们 首 先 需 要 做 的 便 是 进 行 移植 。完成 移植 的过 程 中我们修 改 了3 个和 C P U 相关 的文件 ,分别是O S c p u . h 、O S c p u a . a s m 和O S c p uC . C ,移植 的过 程 中发现 : 根据 处 理器 的不 同 ,一 个移 植 实例 需 要编 写或 改 写 的代 码 数量 不 尽相 同, 可能 介 于
基于单片机的CAN总线数据采集设计与实现

基于单片机的CAN总线数据采集设计与实现一、引言现代汽车的电子控制系统日益复杂,CAN(Controller Area Network)总线作为汽车电子系统中的一种通信协议,广泛应用于汽车内部各种控制单元之间的数据传输。
在汽车电子控制系统中,CAN总线的应用越来越广泛,它不仅能够实现各个控制单元之间的数据交换,还可以实现各种外部传感器和执行器与控制单元之间的快速通信。
对CAN总线的数据采集和处理变得越来越重要。
本文将介绍一种基于单片机的CAN总线数据采集设计与实现方法,通过使用单片机控制CAN总线进行数据的采集和处理,实现对汽车电子系统中的各种传感器的数据采集和处理,为汽车电子控制系统提供更加灵活和高效的数据交换方式。
二、CAN总线数据采集设计原理1. CAN总线基本原理CAN(Controller Area Network)总线是一种串行通信协议,它是一种快速、高效的数据传输方式。
传统的串行通信方式采用的是点对点通信方式,而CAN总线可以实现多节点之间的并行通信,因此具有更高的传输效率和更好的稳定性。
CAN总线的基本组成包括控制器、主控节点、被控节点等。
CAN总线数据采集的基本原理是通过单片机控制CAN总线进行通信,实现对CAN总线上的数据进行采集和处理。
单片机可以通过CAN控制器与CAN总线进行通信,实现数据的接收和发送。
通过编程实现CAN数据帧的接收和解析,可以实现对CAN总线上的数据进行采集和处理。
1. 硬件设计基于单片机的CAN总线数据采集设计的硬件主要包括单片机、CAN总线收发器、外部时钟电路等。
单片机是整个系统的核心部件,它通过CAN总线收发器与CAN总线进行通信,并通过外部时钟电路提供时钟信号。
CAN总线收发器用于将单片机的数字信号转换成CAN总线上的模拟信号,并将CAN总线上的模拟信号转换成单片机的数字信号,实现单片机与CAN总线的通信。
3. 实现步骤第一步,硬件连接。
将单片机、CAN总线收发器、外部时钟电路等硬件按照设计要求进行连接,并进行电气连接的检查和测试。
基于单片机的CAN总线数据采集设计与实现
基于单片机的CAN总线数据采集设计与实现随着物联网和智能化技术的发展,嵌入式系统在日常生活中的应用越来越广泛,其中基于CAN总线的数据采集系统受到了广泛关注。
CAN总线是一种分布式实时控制网络,具有可靠性高、传输速率快等特点,适合用于工业控制、车辆通讯、航空航天等领域。
本文将介绍一种基于单片机的CAN总线数据采集系统的设计与实现方法。
一、系统设计本系统的硬件组成包括STM32F103单片机、CAN总线模块以及传感器模块。
其中,STM32F103是一款高性能低功耗的32位微控制器,具有强大的计算和通讯能力;CAN总线模块可以实现CAN总线的发送和接收功能;传感器模块用于采集环境数据,例如温度、湿度、压力等。
系统设计流程如下:1. 确定系统功能和需求。
2. 选取合适的硬件和软件平台。
3. 设计硬件电路并连接。
4. 选择适合的编程语言和开发工具。
5. 编写程序实现系统功能。
二、系统实现1. 硬件连接本系统的硬件连接如下图所示:(图片来源于网络)(1)Keil uVision5Keil uVision5是一款集成开发环境(IDE),支持多种处理器架构,包括ARM、Cortex-M、8051等。
它集编译器、调试器、仿真器、IDE于一身,支持多种编程语言和工具链。
(2)STM32CubeMXSTM32CubeMX是一款自动生成STM32微控制器初始化代码的软件工具,可以快速构建STM32的应用程序。
(3)CAN analyzerCAN analyzer是用于监控和分析CAN总线的软件工具,可以捕获CAN总线数据,并以图表的形式展示出来。
3. 系统程序设计(1)初始化CAN总线模块在程序中首先需要初始化CAN总线模块,确定传输速率、过滤规则等配置。
(2)读取传感器数据然后需要读取传感器数据,可以使用外部中断或者定时器中断的方式进行采样,获取环境数据并存储到变量中。
(3)将数据发送到CAN总线最后需要将采集到的数据发送到CAN总线,使用CAN总线模块的发送函数将数据打包成CAN数据帧发送出去。
基于CAN总线的分布式数据采集系统
d t c u st n, l b e c mmu iai n a d d t tr g . h y tm a o d u ie slt n e lb l y,tc n b s d i aa a q ii o r i l o i ea n c t n aa so a e As t e s s o e h s g o n v rai a d s a a i t i a e u e n y i
ma y feds n l . i K e wo s: y rd CAN us;d t c iiin;me r a d;i tu n ain b aa a qusto mo y c r nsr me t t o
基于CAN总线的发动机虚拟仪表数据采集系统的设计
虚拟仪 表 可以使 多种仪 表共 享计算 机资 源和数 据采
集设 备 , 而大大 增强 了仪表 的功 能和 降低 了成本 。 从
应用 现场 总线 与虚拟 仪表 技术相 融合 的测控 系统将
一
母周
会充 分发 挥这 两种技 术 的优势 ,形成 互补 。可 以预
见 .现场 总线与 虚拟 仪表 技术 的融合将 是工业 自动
l 9
率低 , 般 在 1 以 内 , 一 K 而且 往 往 附加 了很 多 干 扰 ,
值 的变 化 量 。 因此 对 它 们 的 调 理 电路 原 理 基 本 相
同 , 是 参 数 有 所 不 同 。 如 图 4所 示 。 只
前 置 调 理 电路 的仪 表 采 集 系 统 的 结 构 设 计
本 文 的数据 采集 系统 主要完 成传感 信号 的处理
以及 对 发 动 机 的工 况 数 据 采 集并 将 数据 通 过 C N A
要想 得到精 确 的测 量数 据 ,传感 器的选 择是非
常重要 的 , 因此 , 本文频 率信 号的测量 选用具 有 良好
1 8
内 燃 机 与 配 件
2 1 年第 5 01 期
基 于 CAN总线 的发 动机虚 拟 仪表 数 据 采集 系统 的设计
De i n o t q iii n S se o g neVit a n tu e sg fDa a Ac u sto y tm f r En i r u lI sr m nt Ba e n CAN sdo BUS
低 速性能 和抗 干扰性能 的霍尔式 传感 器 。车速 传感
器输 出的不 是标 准的方 波信号 ,输入 的脉 冲信号频
总线送 上位 机 。具体是 以 飞思卡 尔公 司生产 的微控
基于CAN总线的柴油机数据采集系统设计
2 2 数 据 采 集 模 块 .
Байду номын сангаас
F AS 芯片 , L H 可工 作在 2 5 . 与 单 片机 间通 . ~2 7V, 过 S 1 口连 接 。为 实 现 数 据 与采 集 时 间的 同 时 P 0接 记录 , 使用 DS 3 2时钟 芯 片产生 实 时时钟 , S 3 2 10 D 10 通过 RE S复 位 、/ 数 据 、 C K 串 行 时 钟 3个 口 Io SL
21 0 2年 2月
杨
薇, : 于C 等 基 AN 总 线 的柴 油 机 数 据 采 集 系 统设 计
部 电路 。由于 使 用 C AN 总线 通 信 , 时钟 频 率 的 对
要 求 比较 严 格 , 晶振 电路 选 用 2 . 1 2 1 84 MHz的 晶
以 对 历 史 数 据 进 行 分 析 。 采 用 1 MB t 的 6 ye AT 5 B 6 4 D 1 1作 为存 储 芯 片 , 芯 片是 串 行 接 口的 该
体 振荡 器 。系统 输入 电源为 2 为满 足 不 同信 号 4V, 调 理 电路 、 感 器 、 片机 供 电 以及 AD转 换外 部 电 传 单 压 基准 , 由专 门的 电源 管 理 模 块将 系统 输 入 电压 转 换 为稳 定 的 1 5V, . 和 2 5V, 外加 入热 5V, 3 3V . 另
柴 油 机工 作过 程 复 杂 , 其 运 转 过 程 中输 出 各 在 类参 数 , 些参 数在 不 同程 度 上 反 映 设 备 的 整 体 性 这 能 和工 作 状 态 。 目前 , 油 机 电控 系 统 E U 具 有 柴 C 采集 与 分析 柴油 机 主 要 运 行 参 数 的 功 能 , 在 柴 油 但 机 性能 测试 、 障诊 断及 工作 过 程 实 时 监 测 等 应 用 故 中, 还需 要 对辅 助 参 数 及 其他 信 号 进 行 采 集 , 因此 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
吉林化工学院
毕业设计任务书
题目:基于CAN总线的数据采集系统设计
课题类别: ■毕业设计□毕业论文
教学院:信息与控制工程学院
系别:自动化
专业班级:自动0801
学生姓名:林洪亮
学生学号:08510131
指导教师:付秀伟
职称:助教
下发2012 年 2 月27 日完成2012 年 6 月15 日
本科生毕业设计环节须知
1.勤奋学习,刻苦钻研,勇于探索,尊敬师长。
在指导教师的指导下,保质保量地完成任务书规定的任务。
2.遵守纪律,保证出勤。
因事、因病不能出勤,应事先向导师或有关领导请假,否则作为缺席处理。
凡随机抽查三次不到者,评分降低10分,累计缺席时间达到或超过全过程的1/4者,取消答辩资格,成绩按不及格处理。
3.独立、按时完成规定的设计任务,不弄虚作假,更不允许抄袭和拷贝他人的工作内容,否则毕业设计成绩按不及格处理。
4.毕业设计必须符合规范化的要求,采用信控学院规定的模版,否则不能取得参加答辩的资格。
5.毕业设计成果、资料答辩后交指导教师收存,学生不得擅自带离学校。
成果内容征得指导教师的同意方可作为论文公开发表。
6.毕业设计期间使用实验室,要严格遵守操作规程及实验室有关规章制度。
7.学生对毕业设计场所的环境卫生及安全负有直接责任,必须每天进行卫生清扫,离开后注意切断电源、锁好房门,防火防盗。
8.学生离校外出需按有关规定履行请假手续,未经指导教师和学生办公室同意擅自离校者,将给予严肃处理。
9.学生要按任务书的要求定期接受指导教师检查,要妥善保存《吉林化工学院毕业设计任务书》,毕业设计完成后,将任务书同毕业设计其它材料一同交给指导教师。
题目:基于CAN的数据采集系统设计
一、题目来源(结合工程实践、结合科研、结合实验室建设、自拟课题等):
工程实践
二、设计主要条件及技术参数:
课题内容及要求(请详细填写,如空间不够可添加附页):
设计一种基于CAN的数据采集系统设计系统,能够基于CAN总线系统的数据采集系统设计,具体要求如下:
1.AD转换模块设计
2.CAN通讯节点设计
3.PC机的接入CAN总线设计
4.上位机界面设计
三、个人重点(同一大题目下有个人侧重部分时填写):
四、设计内容及工作量:
1.研究CAN的数据采集系统设计的国内外发展现状、功能特点;
2.数据采集系统总体设计方案
3.数据采集系统硬件设计
4.CAN总线协议的研究
5.CAN通讯节点的软件设计
6.PC机与CAN总线的通讯软件设计
7.PC机的界面设计
8.毕业设计规范要求的各种文字资料的撰写
五、参考资料及参考文献目录:
[1] 张俊杰,章凤麟,叶家骏.高速数据采集系统设计[J].计算机工程,2009,(01):15-18.
[2] 王毅峰.温希东.基于CAN总线的数据采集模块设计[J] 微计算机信息,2005,(32):13-17.
[3] 朱飞.李光辉.陈志英.基于CAN总线的分布式控制网络智能节点设计[J].微计算机信息(测
控仪表自动化),2003(1):12-19.
[4] CAN Specification Version 2.0,1991.1-70./detail/zzkapok/
/834933.
[5] 蒋建文,林勇,等.CAN总线通信协议的分析和实现[J].计算机工程,2002(02):11-16.
[6] 邬宽明.CAN总线原理和应用系统设计[M].北京:北京航天航空大学出版社,1996.30-60.
[7] 饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版
社,2004.90-120.
[8] 阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,2001.111-125.
[9] William Prodanov,Maurizio Valle,Roman Buzas.A Controller Area Network Bus
Transceiver Behavioral Model for Network Design and Simulation.NSTL期刊,2009,56(9):23-29.
[10] 孟庆洪,侯宝稳.ARM嵌入式系统开发与编程[M].北京:清华大学出版社,2011.230-260.
[11] 陈启军,等著.嵌入式系统及其应用:基于Cortex-M3内核和STM32F103系列微控制器的系
统设计与开发[M].上海:同济大学出版社,2011.05.30-80.
[12] ST Microelectronics Corporation STM32F103XX Datasheet,2007.70-80.http://ishare.
/f/16705919.html?from=like&retcode=0.
[13] 王桂荣,钱剑敏.CAN总线和基于CAN总线的高层协议[J].计算机测量与控制,2003
(05):11-17.
[14] 刘建昌,钱晓龙,冯立,陈智锋,左云.CAN总线及Device Net现场总线[J].基础自动化,2001
(03):12-18.
[15] Specification for CANopen,CIA Draft Standard Propsal,2000.2-30.http://
/p-67949134973.html.
六、实习地点:
校内
指导教师(签字):学生所在专业系主任(签字):教学院主管院长(签字):
毕业设计过程检查情况记录
第1 周至第 3 周毕业设计前期应完成任务(开题报告、外文翻译等):文献检索、总体放案论证、外文翻译及开题报告
完成情况及意见:
指导教师签字:
年月日
第 4 周至第10 周毕业设计中期应完成任务:
硬件电路原理设计及实验、软件流程设计
完成情况及意见:
指导教师签字:
年月日
第11 周至第16 周毕业设计后期应完成任务:
代码调试、撰写和修改设计说明,准备答辩
完成情况及意见:
指导教师签字:
年月日
注意:(1)前期检查一般在第3-4周,中期检查一般在9-10周,后期检查一般在14-15周(答辩前)。
(2)指导教师填写本页时,应对学生前一阶段应完成工作任务、完成情况进行详细的说明,并提出下一步整改意见和要求。