时空坐标系统
飘逸时空坐标大全
“魔境”走法攻略
“魔境”走法攻略
“魔境”攻略
一层:僵尸、骷髅、半兽,教主:骷髅精灵、尸王。进入二层座标:10,9 二层:蜈蚣洞,教主:邪恶钳虫、触龙神。进入三层座标:193,124 三层:沃玛寺庙,教主:沃玛教主。进入四层座标:83,83 四层:猪洞,教主:白野猪。进入五层座标:364,229
恶魔平原入
口(81 24)恶魔祭祀地(160 28)恶魔峡谷(143 180)
==============================================================================================
特修(563 649)魔域之城 安全区(468 308)
传送过省
比齐——盟重(673 83)盟重——比齐(515 777)比齐——白日门(327 36)白日门——比
齐(48 479)
(326 36)比齐——魔兽(20 355)魔兽——比齐(366 342)比齐——水上(76 628)水上
——比齐
(18 238)
==============================================================================================
==============
比齐大城 安全区(334 270)
龙之入口(42 110)命运之门(20 99)沃玛入口(145 35)沃玛厅堂(25 25)3层口(50 363)比齐矿区
入口(663 215)比齐矿区——沙秘密通道(78 15)比齐矿区——盟重矿区2层(178 108)比齐新村(289
融合多源数据的时空地理信息系统设计与实现
融合多源数据的时空地理信息系统设计与实现一、引言近年来,随着各种智能设备和数字化技术的不断发展,不同领域产生的数据呈现多样化、多源性的特点。
如何将这些数据进行融合,以便更好地支持人们的决策和管理,成为了时空地理信息系统设计与实现中的一大难点。
本文将从融合多源数据的概念和意义、时空地理信息系统的设计与实现、融合多源数据的方法和技术、融合多源数据的应用等方面进行论述和探讨。
二、融合多源数据的概念和意义融合多源数据是指将来自不同领域、不同来源的数据进行整合、处理和分析,以期获得更全面、准确、可靠的决策和管理信息。
多源数据包括空间数据、时间数据、个人数据、社交数据、传感数据等多种类型的数据。
在未融合多源数据的情况下,决策者可能面临数据不充分、误差过大、信息重复等问题。
融合多源数据的意义在于:一方面,它可以提供更为全面的信息支持,使决策者能够更好地把握问题的本质和发展趋势。
另一方面,融合多源数据可以使信息更加准确、可靠,从而降低决策错误的风险。
三、时空地理信息系统的设计与实现时空地理信息系统是为解决空间和时间问题而设计的信息系统,主要由数据采集、数据处理、数据管理和数据可视化等模块组成。
(一)数据采集数据采集是系统的首要任务,它涉及到对不同种类的数据进行收集、处理、分类和标准化的流程。
常用的数据采集方式主要包括遥感技术、全球定位系统(GPS)、无线传感器网络、行业数据库等。
(二)数据处理数据处理是对采集到的数据进行处理和分析的过程,包括清洗、预处理、标准化、转换、融合等。
数据处理是提高数据质量和实现数据融合的必要前置条件。
(三)数据管理数据管理是对系统数据进行存储、管理和维护的过程,主要包括数据的存储结构、数据的访问和管理方式等,同时也需要考虑保障数据的安全性和隐私性问题。
(四)数据可视化数据可视化是系统的最终输出形式,通常使用各种图表、地图等形式展示数据,以便实现对数据的理解和决策支持。
四、融合多源数据的方法和技术融合多源数据的方法和技术有很多,常用的方法包括数据互换、数据融合、数据分析和数据挖掘等。
时间和坐标系统

18
1. 时间系统 2. 坐标系统
授课内容
19
2.1 坐标系的定义
20
2.2 航天任务常用坐标系—地心惯性坐标系(ECI)
主要用途:轨道分析,天文学,惯性运动 原点:地心(航天器) 基准平面:赤道 ,z轴为基准平面的法线 主轴x:指向春分点 第三轴y:由右手定则确定
问题:速度矢量如何转换?
v ECF
=
R v ECF J 2000 J
2000
R r ECF J 2000 J 2000
J2000 = 2451545
14
1.4 航天中的时间
课堂练习:计算东经50°在1996年10月26日下午2:20 (UT1)的恒星时。
GMST 67310.54841s (876600h 86400184.812866s )TUT1
+0.093104TU2T1
6.2 106
T3 UT 1
章动:月球围绕地球公转 导致地球自转轴绕平天极 左右摇摆的现象,周期约 为18.6年,振幅为9.21秒。 考虑岁差和章动的地球自 转轴称为真天极,对应的 赤道为真赤道。
岁差和章动描述了地球自 转轴在惯性空间的不稳定。
9
1.4 航天中的时间
极移:地球瞬时自转轴在 地球本体内的运动。 1765年,欧拉在假定地球 是刚体的前提下,最先从 力学上预言极移的存在。 1888年德国的屈斯特纳才 从纬度变化的观测中发现 极移。
25
2.3 坐标系统的相互转换 1、J2000(ECI)到地球固定坐标系(ECF)
历史时空坐标

• 人民共和国诞生,美国建立北约,德国分裂。
第十四单元新中国成立到文革结束
• 1949—1956年是中华人民共和国成立和社会 主义过渡时期。建国头七年党的路线,指导 方针和基本政策是正确的,因而成功实现从 新民主主义革命向社会主义革命的转变。
• 五十年代中期开始美苏争霸开始。1955年
• 奴隶制生产关系的本质特征在于奴隶主不 仅占有生产资料与生活资料,而且占有奴隶, 奴隶制国家是人类进入文明社会的标志,是 生产力发展的必然结果。
• 夏商周是中国的青铜时代,这一时期中国 确立了分封制、宗法制、井田制等奴隶社会 的基本典章制度,春秋战国时期诸侯争霸、 礼乐文明维系的等级秩序瓦解。
• 铁器与牛耕加上水利兴修使中国封 建制逐渐取代奴隶制,四分五裂走向 统一与中央集权,华夏族作为中华民 族主体与核心的地位日益确立。急剧 而深刻的社会变革、日新月异的社会 生产力促使中国思想文化群星璀璨, 百家争鸣形成一道文化景观。
历史时空坐标
第一单元中华文明的源头与奠基-----先秦 时期
公元前2070年中国历史上第一个国家政权夏
建立,从此在黄河、长江两条巨龙的故 乡,中华民族的祖先告别了刀耕火种、 茹毛饮血的原始蛮荒时代,进入到以 国家产生为主要标志的文明社会。同 时期的古埃及、古巴比伦、古代印度 的文明成果早已淹没在历史长河之中。 唯有绵亘五千年的中华文明生生不息、 一脉传承。
第三单元封建文明云遮雾罩----三国两晋南北 朝公元三世纪早期-----六世纪末220--581
• 国家分裂,多个政权并存,王朝更 迭频繁;北方经济在破坏与恢复的循环 往复中曲折发展,江南得到开发,南 北经济差距缩小,民族大融合,动荡 的政局使思想领域异常活跃,各文化 领域带有鲜明的分裂割据烙印与浓郁 民族融合气息。
第三节相对论时空观

N N 0e
止的 子的平均寿命为 0 2.21 106 s 。 在 1963 年的一次实验中,在海拔 1910m 高处,测得由宇宙线产生的速度在 0.9950~0.9954c 之间铅直向下运动的 子数为平均每小时 56310 个, 而在离海 平面 3m 处, 测得同样速度的 子数为平均每小时 4089 个(其它 子已经发生了 衰变)。试求: (1) 运动 子的平均寿命; (2) 验证明间膨胀公式
0
1 v2 1 2 c
0
1 1 (0.75) 2
2.6 108 3.93 108 s
《大学物理》
教师:
胡炳全
所以,在 S 系中测量时, 介子从产生地到衰变地要平均飞行的距离为:
l v 0.75 3 108 3.93 108 s 8.84m
•根据同时性的相对性,在一个参照系中校准的时钟在另 一个参照系看来是没有校准的。
《大学物理》
教师:
胡炳全
二、时间延缓效应
1、本征时间(固有时间): 一个惯性系中同一地点先后发生的两个事件的时 间间隔,在狭义相对论中叫做本征时间或固有时间。
2L t ' c
就是发光后接收到光这两个事 件的本征时间或固有时间。
《大学物理》
教师:
胡炳全
由光速不变原理,S系中的光速仍为c,故Δt应满足:
s 2 2 t L (vt / 2) 2 c c
解之可得:
2L t c
1 v 1 2 c
2
t ' v2 1 2 c
为了书写简洁,我们常用如下符号简写:
1 v2 1 2 c v c 1 1
洛伦兹变换的详细推导

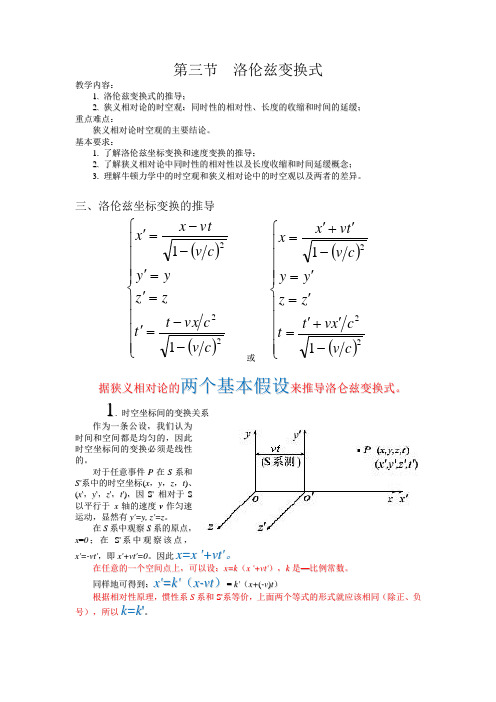
第三节洛伦兹变换式教学内容:1.洛伦兹变换式的推导;2.狭义相对论的时空观:同时性的相对性、长度的收缩和时间的延缓;重点难点:狭义相对论时空观的主要结论。
基本要求:1.了解洛伦兹坐标变换和速度变换的推导;2.了解狭义相对论中同时性的相对性以及长度收缩和时间延缓概念;3.理解牛顿力学中的时空观和狭义相对论中的时空观以及两者的差异。
三、洛伦兹坐标变换的推导1.时空坐标间的变换关系x=0;在S'系中观察该点,x'=-v t',即x'+v t'=0。
因此x=x'+v t'。
在任意的一个空间点上,可以设:x=k(x'+v t'),k是—比例常数。
同样地可得到:x'=k'(x-v t)=k'(x+(-v)t)根据相对性原理,惯性系S系和S'系等价,上面两个等式的形式就应该相同(除正、负号),所以k=k'。
2.由光速不变原理可求出常数k设光信号在S系和S'系的原点重合的瞬时从重合点沿x轴前进,那么在任一瞬时t(或t'),光信号到达点在S系和S'系中的坐标分别是:x=c t,x'=c t',则:由此得到()22211c v vc c k -=-=。
这样,就得到()21c v vt x x --=',()21c v t v x x -'+'=。
由上面二式,消去x '因此得相对论的速度变换公式: 21c vu v u u x x x --='、()2211c vu c v u u x y y --='、()2211c vu c v u u x z z --='其逆变换为:21c u v v u u x x x '++'=、()2211c u v c v u u x y y '+-'=、()2211c u v c v u u x z z '+-'=。
时空定位钟第一章概扩

时空定位钟第一章概扩时空定位钟是一种可以测量和定位时空坐标的装置。
它结合了时钟和定位技术,能够同时提供时间和空间的信息。
在未来世界中,时空定位钟已经成为人们生活中不可或缺的工具。
第一章主要介绍了时空定位钟的原理和功能。
时空定位钟是基于相对论和量子力学的基础上设计的,利用高精度的时钟和先进的定位系统来测量物体的时空坐标。
它可以精确地测量时间的流逝和物体在三维空间中的位置。
时空定位钟的工作原理是通过测量光的传播时间和信号的强度来确定物体的位置。
它使用先进的激光技术和精密的时钟装置来测量光的传播时间,然后利用三角定位原理计算出物体的位置。
同时,时空定位钟还可以通过测量物体发出的电磁信号的强度来确定其距离。
时空定位钟具有广泛的应用领域。
在导航领域,时空定位钟可以精确地定位和导航飞行器、船舶和车辆等移动物体。
在天文学领域,时空定位钟可以追踪行星和恒星的运动轨迹,提供准确的天体观测数据。
在科学研究领域,时空定位钟可以用于测量物体运动的速度和加速度,研究时空的相关理论。
尽管时空定位钟具有众多优势和应用,但它也面临一些挑战。
首先,时空定位钟的制造和维护成本较高,需要大量的精密设备和高级技术。
其次,时空定位钟对环境和天气条件有一定的限制,如大气湿度和电磁干扰等因素会降低测量精度。
此外,时空定位钟还需要与其他定位系统进行数据交互和融合,以提高定位的准确性和可靠性。
总之,时空定位钟是一种具有重要意义和广泛应用前景的技术。
它可以精确测量和定位物体的时空坐标,为人们提供准确的时间和位置信息。
随着技术的发展和改进,时空定位钟将在各个领域展示出更大的潜力和价值。
(完整版)洛伦兹变换的详细推导
第三节 洛伦兹变换式教学内容:1. 洛伦兹变换式的推导;2. 狭义相对论的时空观:同时性的相对性、长度的收缩和时间的延缓; 重点难点:狭义相对论时空观的主要结论。
基本要求:1. 了解洛伦兹坐标变换和速度变换的推导;2. 了解狭义相对论中同时性的相对性以及长度收缩和时间延缓概念;3. 理解牛顿力学中的时空观和狭义相对论中的时空观以及两者的差异。
三、洛伦兹坐标变换的推导()()⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧--='='='--='22211c v c vx t t z z y y c v vt x x 或 ()()⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧-'+'='='=-'+'=22211c v c x v t t z z y y c v t v x x据狭义相对论的两个基本假设来推导洛仑兹变换式。
1. 时空坐标间的变换关系作为一条公设,我们认为时间和空间都是均匀的,因此时空坐标间的变换必须是线性的。
对于任意事件P 在S 系和S '系中的时空坐标(x ,y ,z ,t )、(x ',y ',z ',t '),因S ' 相对于S 以平行于 x 轴的速度v 作匀速运动,显然有y '=y , z '=z 。
在S 系中观察S 系的原点,x =0;在S '系中观察该点,x '=-v t ',即x '+v t '=0。
因此x =x '+v t '。
在任意的一个空间点上,可以设:x =k (x '+v t '),k 是—比例常数。
同样地可得到:x '=k '(x -v t )= k '(x +(-v )t )根据相对性原理,惯性系S 系和S '系等价,上面两个等式的形式就应该相同(除正、负号),所以k =k '。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS导航原理与应用
地球坐标参照系 > 基准转换 > 布尔沙模型 - 七参数法
布尔沙模型 - 七参数法
• 转换过程
GPS导航原理与应用
地球坐标参照系 > 基准转换 > 布尔沙模型 - 七参数法
布尔沙模型 - 七参数法
• 转换模型
X B TX XA Y T (1 m) R( ) R( ) R( ) Y Z Y X A B Y Z B TZ ZA TX XA TY (1 m) R( ) YA TZ ZA
地球坐标参照系 > 基准转换 > 基本转换的数学表达
基本转换的数学表达
• 缩放变换
XB XA Y 1 m Y A B ZB ZA 其中, m SB S A SA
S A , S B 分别为A,B两个坐标系 下的单位长度
GPS导航原理与应用
参考椭球面
• 地球内部的物质分布不均匀,因而地球重力 场的变化也不规则,大地水准面在各点上应 与铅垂线方向正交,无法用一个简单的数学 方程来描述。 • 在实际应用中,人们采用一个旋转椭球面按 照一定的期望指标(椭球面和大地水准面之 间的高度差的平方和最小)来近似大地水准 面,这样的椭球面称之为参考椭球面。
GPS导航原理与应用
地球坐标参照系 > 基准转换 > 布尔沙模型 - 七参数法
2.4.2布尔沙模型 - 七参数法
• 概述
–布尔沙-沃尔夫(Bursa-Wolf)模型 – 在该模型中共采用了7个参数,分别是 3个平移参数、3个旋转参数(也被称 为3个欧拉角)和1个尺度参数。 – 又被称为七参数转换(7-Parameter Transformation)或七参数赫尔墨特 变换(7-parameter Helmert transformation)
GPS导航原理与应用
地球坐标参照系 > 基准转换
§2.4. 坐标系转换
• • • • • • 2.4.1基本转换的数学表达 2.4.2布尔沙模型 2.4.3莫洛金斯基模型 2.4.4天球直角坐标系与球面坐标系的相互转换 2.4.5 地球大地坐标系转换成地球直角坐标系 2.4.6 协议地球坐标系(CTS,T)与协议天球坐标系(I) 的转换 • 2.4.7站心直角坐标与站心极坐标间的相互转换
GPS导航原理与应用
地球坐标参照系 > 基准转换 > 基本转换的数学表达
2.4.1基本转换的数学表达
• 平移变换
X B X A TX Y Y T B A X Z B Z A TX
GPS导航原理与应用
GPS导航原理与应用
• 参考椭球面的大小和形状可以用两个几何参数来描述,即 长半轴a和扁率f,其具体数值由大地测量确定。 • 目前应用中两个比较重要的参考椭球系是克拉索夫斯基椭 球和WGS-84椭球
GPS导航原理与应用
大地水准面、地面与椭球面之间的关系
• 椭球高度h:椭球面E上方的点P的高度,对应EP; • 大地水准高度N:椭球面E上方的点G的高度,对应EG; • 海拔高H:大地水准面G上方的点P的高度,对应GP。
– 原点O与地球质心重合 – Z轴指向地球北板,X轴指向地球赤道面与格威治子午 圈的交点E – Y轴在赤道玉米面里与XOZ构成右手系统。
GPS导航原理与应用
地球坐标系定义:
• 原点与地球质心重 合, • 短轴与地球自转轴 重合, • 纬度φ:过P点的 椭球与椭球赤道面 的夹角 • 经度λ:过P点所在 的椭球子午面与格 林威治子午面的夹 角 • 高度h:P点椭球 法线到椭球面的距 离
GPS导航原理空间中相对于一个 参照系来确定点的位置的一组数。
• 空间坐标系
– 定义:由原点位置,3个坐标轴的指向和尺度所 定义。 – 类型:天球坐标系、地球坐标系
• 坐标系转换
– 通过坐标平移,旋转和尺度转换
GPS导航原理与应用
• 天球坐标系 不随地球自转的地心坐标系,是空间固 定坐标系,用于对卫星位置描述。 • 地球坐标系 与地球固联的地心坐标系,用于描述用 户空间位置。
h N H
P 地形 H G 大地水准面
N E 椭球面
GPS导航原理与应用
地形面、参考椭球面和大地水准面
GPS导航原理与应用
2.3.2 地球坐标系
• • • • GPS接收机的位置是相对于地球坐标系; 固联于地球上随同地球转动的坐标系; 地球直角坐标系和地球在地坐标系; 地球直角坐标系定义:
• 天球球面坐标系
– 地球质心为系统原点, – 春分点轴与天轴所在平 面为测量基准----基准子 午面, – 天球子午面:过天轴的 所有平面 – 赤经α:天球子午面与基 准子午面夹角,以春分 点划分东西(0~180) – 赤纬δ:天体S与原点M 的连线相对于天球赤道 平面的夹角,天球赤道 向北向南分(0~90) – 长度r:原点M到天体S 的径向长度称为天体S的 距离。
GPS导航原理与应用
岁差、章动
• 在外力的作用下,地球自转轴在空间并不保 持固定的方向,而是不断发生变化。 • 地轴的长期运动称为岁差,而其周期运动则 称为章动。 • 岁差和章动引起天极和春分点在天球上的运 动。
GPS导航原理与应用
日月岁差和章动
GPS导航原理与应用
岁差
• 公元前二世纪古希腊天文学家喜帕恰斯是岁差现 象的最早发现者。公元四世纪,中国晋代天文学 家虞喜根据对冬至日恒星的中天观测,独立地发 现岁差并定出冬至点每50年后退一度。 • 牛顿是第一个指出产生岁差的原因是太阳和月球 对地球赤道隆起部分的吸引。在太阳和月球的引 力作用下,地球自转轴绕着黄道面的垂直轴旋转, 在空间绘出一个圆锥面,绕行一周约需26,000年。
GPS导航原理与应用
§ 2.2 天球坐标系 • 基本概念
– – – – – 天球天轴与天极 赤道面与天球赤道 天球子午面与子午圈 黄道与黄极 春分点与秋分点
GPS导航原理与应用
• 天球坐标系定义
– – – – 原点为地球质心 天球极轴 春分点轴 垂直以上两轴并位于天球赤道面,按右手定则 确定的轴
GPS导航原理与应用
极移(北地极)
• 地球复杂的内部运动,地球非刚体; • 北地极在地球表上随着时间的变化是不断变 化的,称为地极移动。 • 瞬时地极对应的坐标为瞬时地球坐标系; • 坐标轴随时间而变化,对描述地球上某一点 的位置不方便。
GPS导航原理与应用
协议地球坐标系
• • • • • 地极基准点,国际协议原点CIO,Z轴指向CIO点; X轴指向协议赤道面与格林尼治子午线的交点; Y轴与XOZ构成右手系统; 简称CTS,与地球固联的坐标系,理想的地固系; 工程中,由国际时间局(BIH),BIH地球参考系 BTS。
电子科技大学空天科学技术研究院
GPS导航原理与应用 (二)
GPS导航原理与应用
第二章 GPS的时空参考系统
§2.1. 坐标系统基本概念 §2.2. 天球坐标系 §2.3. 地球坐标系 §2.4. 坐标系转换 §2.5. 常用坐标系 §2.6. 时间参考系统
GPS导航原理与应用
2.1 坐标系统简介 • 坐标系统和时间系统是GPS的基本参考系统 • 描述卫星运动、处理观测数据、表达用户位置 的物理与数学基础。
章动
• 英国天文学家不拉德雷在1748年分析了1727- 1747年的恒星位置的观测资料后,发现了章动。 • 月球轨道面(白道面)位置的变化是引起章动 的主要原因。白道的升交点沿黄道向西运动, 约18.6年绕行一周,因而月球对地球的引力作 用也有同一周期的变化。 • 在天球上表现为天极(真天极)在绕黄极运动 的同时,还围绕其平均位置(平天极)作周期 18.6年的运动。
GPS导航原理与应用
GPS导航原理与应用
2.3.3 站心坐标系
• 站心坐标系
– Topocentric Coordinate System – 定义:以测站为原点的坐标系。 – 类型:站心直角坐标系和站心极坐标系。
GPS导航原理与应用
地球坐标参照系 > 常用坐标系 > 站心坐标系
站心坐标系
• 站心直角坐标系
GPS导航原理与应用
地球坐标参照系 > 基准转换 > 基本转换的数学表达
基本转换的数学表达
• 旋转变换
XB XA Y R ( )R ( )R ( ) Y 3 Z 2 Y 1 X A B ZB ZA 其中, 0 0 1 R1 ( X ) 0 cos x sin x 0 sin cos x x cos Y 0 sin Y R 2 (Y ) 0 1 0 sin 0 cos Y Y cos Z sin Z 0 R 3 (Z ) sin Z cos Z 0 0 0 1
GPS导航原理与应用
§2.3地球坐标系
• 2.3.1 地球几何形状 • 2.3.2地球坐标系 • 2.3.3站心坐标系
GPS导航原理与应用
2.3.1 地球几何形状
• 人们对地球形状和大小的认识经历了一个相 当长的历史过程。
– 地球是在不断自旋的,按照自旋的物理特性, 地球应该是一个旋转椭球 – 地球表面起伏不平,有高山、陆地、大海等很 不规则,并不是理想旋转椭球体。 – 地球的形状通常可由物理表面和数学表面来表 示。
GPS导航原理与应用
• 在天球上天极绕黄极描绘出一个半径约为 23.5°(黄赤交角)的小圆,在这个圆上, 北天极每年约西移50.371”,周期大约为 25800年。 • 这种由太阳和月球引起的地轴的长期运动称 为日月岁差。 • 其他行星引力造成的影响叫做行星岁差,合 者称为总岁差。