自动控制原理MATLAB课程设计--滞后-超前校正
基于MATLAB进行控制系统的滞后-超前校正设计要点
计算机控制技术------滞后-超前校正控制器设计系别:电气工程与自动化专业:自动化班级:B110411学号:B11041104姓名:程万里目录一、 滞后-超前校正设计目的和原理 (1)1.1 滞后-超前校正设计目的......................................................... 1 1.2 滞后-超前校正设计原理......................................................... 1 二、滞后-超前校正的设计过程 (3)2.1 校正前系统的参数 (3)2.1.1 用MATLAB 绘制校正前系统的伯德图................................. 3 2.1.2 用MATLAB 求校正前系统的幅值裕量和相位裕量.................. 4 2.1.3 用MATLAB 绘制校正前系统的根轨迹................................. 5 2.1.4 对校正前系统进行仿真分析.............................................5 2.2 滞后-超前校正设计参数计算 (6)2.2.1 选择校正后的截止频率c ω............................................. 6 2.2.2 确定校正参数β、2T 和1T (6)2.3 滞后-超前校正后的验证 (7)2.3.1 用MATLAB 求校正后系统的幅值裕量和相位裕量..................7 2.3.2 用MATLAB 绘制校正后系统的伯德图.................................8 2.3.3 用MATLAB 绘制校正后系统的根轨迹.................................9 2.3.4 用MATLAB 对校正前后的系统进行仿真分析 (10)三、前馈控制3.1 前馈控制原理..................................................................... 12 3.2控制对象的介绍及仿真......................................................... 12 四、 心得体会.............................................................................. 16 参考文献.......................................................................................17 附录 (18)一、滞后-超前校正设计目的和原理1.1 滞后-超前校正设计目的所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
自控原理超前滞后校正
定常系统的频率法超前校正1问题描述用频率法对系统进行校正,是利用超前校正网络的相位超前特性来增大系统的相位裕量,从而提高系统的稳定性,致使闭环系统的频带扩展,以达到改善系统暂态响应的目的。
但系统频带的加宽也会带来一定的噪声干扰,为了系统具有满意的动态性能,高频段要求幅值迅速衰减,以减少噪声影响。
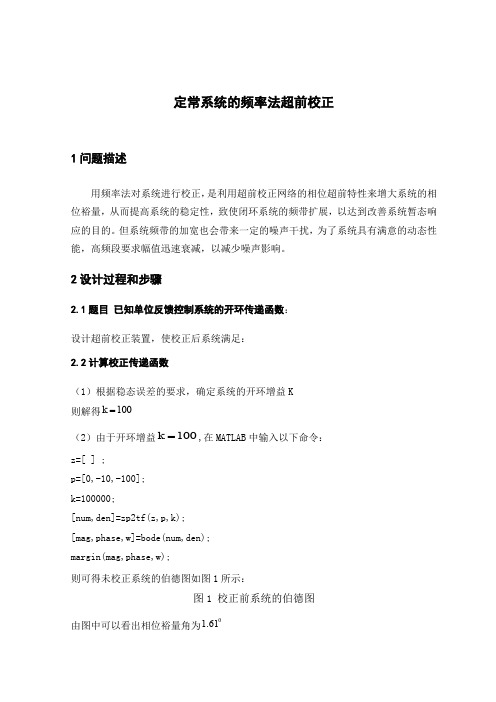
2设计过程和步骤2.1题目 已知单位反馈控制系统的开环传递函数:设计超前校正装置,使校正后系统满足:2.2计算校正传递函数(1)根据稳态误差的要求,确定系统的开环增益K则解得100k =(2)由于开环增益100k =,在MATLAB 中输入以下命令:z=[ ] ;p=[0,-10,-100];k=100000;[num,den]=zp2tf(z,p,k);[mag,phase,w]=bode(num,den);margin(mag,phase,w);则可得未校正系统的伯德图如图1所示:图1 校正前系统的伯德图由图中可以看出相位裕量角为061.1(3)谐振峰值为%0.161 1.250.4r M σ-=+=, 给定系统的相位裕量值1arcsin()53.1301r M γ==,由于未校正系统的开环对数幅频特性在剪切频率处的斜率为40/db dec -,一般取005~10ε=,在这里取为10,超前校正装置应提供的相位超前量φ,即:5201.611061.11301.531=+-=+-==εγγφφmε是用于补偿因超前装置的引入,使系统的剪切频率增大而增加的相角迟后量。
(4)根据所确定的最大相位超前角m φ,按下式计算相应的α(5)计算校正装置在m w 处的幅值110log α。
由于校正系统的对数幅频特性图,求得其幅值为110log α-处的频率,该频率m φ就是校正后系统的开环剪切频率c w ,即76.80==m c ωω(6)确定校正网络的转折频率和1ω、2ω4946.200644.076.8011=⨯===αωωm T ,(7)画出校正后系统的伯德图,并验算相应的相位裕量是否满足要求?如果不满足,则改变ε值,从步骤(3)开始重新进行计算。
用MATLAB进行控制系统的滞后-超前校正设计
课程设计任务书学生姓名: 专业班级:指导教师: 程 平 工作单位: 自动化学院 题 目: 用MATLAB 进行控制系统的滞后-超前校正设计 初始条件:已知一单位反馈系统的开环传递函数是)102.0)(11.0()(++=s s s Ks G要求系统的静态速度误差系数150-≥S v K , 40≥γ,s rad w c /10≥。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、MATLAB 作出满足初始条件的最小K 值的系统伯德图,计算系统的幅值裕量和相位裕量。
2、前向通路中插入一相位滞后-超前校正,确定校正网络的传递函数。
3、用MATLAB 画出未校正和已校正系统的根轨迹。
4、用Matlab 对校正前后的系统进行仿真分析,画出阶跃响应曲线5、课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日串联滞后-超前校正兼有滞后校正和超前校正的优点,即已校正系统的响应速度较快,超调量较小,抑制高频噪声的性能也较好。
当校正系统不稳定,且要求校正后系统的响应速度,相角裕度和稳态精度较高时,以采用串联滞后-超前校正为宜。
其基本原理是利用滞后-超前网络的超前部分来增大系统的相角裕度,同时利用滞后部分来改善系统的稳态性能。
此次课程设计就是利用MATLAB对一单位反馈系统进行滞后-超前校正。
通过运用MATLAB的相关功能,绘制系统校正前后的伯德图、根轨迹和阶跃响应曲线,并计算校正后系统的时域性能指标。
关键字:超前-滞后校正 MATLAB 伯德图时域性能指标1 滞后-超前校正设计目的和原理 (1)1.1 滞后-超前校正设计目的 (1)1.2 滞后-超前校正设计原理 (1)2 滞后-超前校正的设计过程 (3)2.1 校正前系统的参数 (3)2.1.1 用MATLAB绘制校正前系统的伯德图 (4)2.1.2 用MATLAB求校正前系统的幅值裕量和相位裕量 (4)2.1.3 用MATLAB绘制校正前系统的根轨迹 (5)2.1.4 对校正前系统进行仿真分析 (6)2.2 滞后-超前校正设计参数计算 (7) (8)2.2.1 选择校正后的截止频率c2.2.2 确定校正参数 (8)2.3 滞后-超前校正后的验证 (9)2.3.1 用MATLAB求校正后系统的幅值裕量和相位裕量 (9)2.3.2 用MATLAB绘制校正后系统的伯德图 (10)2.3.3 用MATLAB绘制校正后系统的根轨迹 (11)2.3.4 用MATLAB对校正前后的系统进行仿真分析 (12)3 心得体会 (14)参考文献 (16)用MATLAB进行控制系统的滞后-超前校正设计1 滞后-超前校正设计目的和原理1.1 滞后-超前校正设计目的所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
自动控制原理课程设计 超前校正

自动控制原理课程设计一. 设计题目1.掌握控制系统的设计与校正方法、步骤。
2.掌握对控制系统的相角裕度、稳态误差、截止频率和动态性能分析。
3.掌握利用matlab 对控制理论内容进行分析。
4.提高大家分析问题解决问题的能力。
二. 题目任务及要求题目1:已知单位负反馈系统被控制对象的开环传递函数()()10+=s s K s G 用串联校正的频率域方法对系统进行串联校正设计。
任务:用串联校正的频率域方法对系统进行串联校正设计,使系统满足如下动态及静态性能指标:(1)在单位斜坡信号作用下,系统的稳态误差rad e ss 151<; (2)系统校正后,相位裕量 45≥γ。
(3)截止频率s rad c /5.7≥ω。
设单位负反馈系统的开环传递函数为)1()(+=s s K s G用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:(1) 相角裕度045≥γ;(2) 在单位斜坡输入下的稳态误差为1.0=sse ; (3) 系统的剪切频率wc <4.4rad/s 。
(4)模值余度h ≥10dBk=10;num1=[1];den1=conv([1 0],[1 1]); sys1=tf(k*num1,den1); figure(1);Margin(sys1);hold onfigure(2);sys=feedback(sys1,1) step(sys)Transfer function:10-------s^2 + s未校正前的Bode图未校正前的的阶跃响应曲线由图可以看出未经校正的Bode图及其性能指标,还有如图(-2)所示的未校正的系统的阶跃响应曲线。
由图(-1)可以看出系统的:模值稳定余度; h=∞dB; -pi穿越频率:Wg=∞dB;相角稳定余度为γ=180剪切频率:Wc=3.08rad/s;由图(-1)可以知道,系统校正前,相角稳定余度=18<45。
为满足要求,开环系剪切频率wc=3.08rad/s<4.4rad/s。
自动控制原理--滞后超前校正与PID校正
G s 1 T1s 1 aT2s
1 T1s 1 T2s
°
其中:
E1
1,a 1且.a 1 °
C1
R1
°
R2
E2
C2
°
Phase (deg); Magnitude (dB)
To: Y(1)
Bode Diagrams
From: U(1) 0
-5
-10
-15
-20 50
0
-50
ቤተ መጻሕፍቲ ባይዱ
10-4
10-3
10-2
应 50o 处的g 0.082 rad s,相应幅频特性为Lg 45.5db
据此,由20log KP Lg 45db 求得:KP 0.0053 。
为减少对相角裕量校正效果影响,PI控制器转折 频率 1 KI KP 选择远离g 处,取1 g 10 0.0082 rad s 求得:KI 0.000044 。于是,PI控制器传递函数
• PID调节器是一种有源校正网络,它获得了 广泛的应用,其整定方法要有所了解。
系统校正的设计方法
分析法
综合法
分析法:
选择一种校正装置
设计装置的参数
校验
综合法: 设计希望特性曲线 校验
确定校正装置的参数
期望特性综合设计方法:
1、先满足精度要求,并画出原系统Bode图; 2、根据Bode定理,系统有较大的相位裕量,幅频特性在剪切频
G( j)
1
j2T( jT 1)
63.5
0.707
二阶最佳指标:
L() -20dB/dB
1/2T
()
p % 4.3%
180°
ts (6 ~ 8)T
1/T
基于matlab的自动化控制系统课程设计论文
摘要串联滞后-超前校正兼有滞后校正和超前校正的优点,即已校正系统的响应速度较快,超调量较小,抑制高频噪声的性能也较好。
当校正系统不稳定,且要求校正后系统的响应速度,相角裕度和稳态精度较高时,以采用串联滞后-超前校正为宜。
其基本原理是利用滞后-超前网络的超前部分来增大系统的相角裕度,同时利用滞后部分来改善系统的稳态性能。
此次课程设计就是利用MATLAB对一单位反馈系统进行滞后-超前校正。
通过运用MATLAB的相关功能,绘制系统校正前后的伯德图、根轨迹和阶跃响应曲线,并计算校正后系统的时域性能指标。
关键字:超前-滞后校正 MATLAB 伯德图时域性能指标目录摘要 21 设计要求及方法 5 1.1 设计要求 51.2 设计方法 52 滞后-超前校正设计目的和原理 5 2.1 滞后-超前设计目的 52.2 滞后=超前设计原理63 滞后-超前校正的设计过程7 3.1 校正前参数73.1.1 用MATLAB绘制校正前系统的伯德图73.1.2 用MATLAB求校正前系统的幅值裕量和相位裕量83.1.3 用MATLAB绘制校正前系统的根轨迹93.1.4 对校正前系统进行仿真分析10 3.2 滞后-超前校正设计参数计算113.2.1利用MATLAB计算出滞后校正器的传递函数113.2.2 利用MATLAB计算出超前校正器的传递函数11 3.3 滞后-超前校正的验证133.3.1 用MATLAB求校正后系统的幅值裕量和相位裕量133.3.2 用MATLAB求校正后系统的伯德图143.3.3 用MATLAB求校正后系统的根轨迹153.3.4 用MATLB对校正后的系统进行仿真分析164 传递函数特征根的计算17 4.1 校正前系统的传递函数的特征根174.2 校后前系统的传递函数的特征根185 系统动态分析18 5.1 校正前系统的动态性能分析185.2 校正后系统的动态性能分析236 系统的根轨迹分析26 6.1 校正前系统的根轨迹分析266.2 校正后系统的根轨迹分析287 系统的幅相特性30 7.1 校正前系统的幅相特性307.2 校正后系统的幅相特性318 系统的对数幅频特性及对数相频特性32 8.1 校正前系统的对数幅频特性及对数相频特性328.2 校正后系统的对数幅频特性及对数相频特性339 心得体会35 参考文献351设计要求及方法1.1设计要求 已知单位负反馈系统的开环传递函数0()(1)(0.251)K G S S S S =++,试用频率法设计串联校正装置,要求校正后系统的静态速度误差系数1v K 5s -≥,系统的相角裕度045γ≥,校正后的剪切频率2C rad s ω≥。
自动控制原理课程设计串联超前滞后校正装置
自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
(2)掌握对控制系统相角裕度、稳态误差、剪切频率、相角穿越频率以及增益裕度的求取方法。
(3)掌握利用Matlab对控制系统分析的技能。
熟悉MATLAB这一解决具体工程问题的标准软件,能熟练地应用MATLAB软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。
(4)提高控制系统设计和分析能力。
(5)所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
校正方案主要有串联校正、并联校正、反馈校正和前馈校正。
确定校正装置的结构和参数的方法主要有两类,分析法和综合法。
分析法是针对被校正系统的性能和给定的性能指标,首先选择合适的校正环节的结构,然后用校正方法确定校正环节的参数。
在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正和滞后-超前校正这三种类型。
超前校正通常可以改善控制系统的快速性和超调量,但增加了带宽,而滞后校正可以改善超调量及相对稳定度,但往往会因带宽减小而使快速性下降。
滞后-超前校正兼用两者优点,并在结构设计时设法限制它们的缺点。
二、设计要求(姬松)1.前期基础知识,主要包括MATLAB系统要素,MATLAB语言的变量与语句,MATLAB的矩阵和矩阵元素,数值输入与输出格式,MATLAB系统工作空间信息,以及MATLAB的在线帮助功能等。
2.控制系统模型,主要包括模型建立、模型变换、模型简化,Laplace变换等等。
3.控制系统的时域分析,主要包括系统的各种响应、性能指标的获取、零极点对系统性能的影响、高阶系统的近似研究,控制系统的稳定性分析,控制系统的稳态误差的求取。
4.控制系统的根轨迹分析,主要包括多回路系统的根轨迹、零度根轨迹、纯迟延系统根轨迹和控制系统的根轨迹分析。
5.控制系统的频域分析,主要包括系统Bode 图、Nyquist 图、稳定性判据和系统的频域响应。
用MATLAB进行控制系统的滞后-超前校正设计
课程设计任务书学生姓名: 李 超 专业班级: 电气 1001班 指导教师: 刘志立 工作单位: 自动化学院 题 目: 用MATLAB 进行控制系统的滞后-超前校正设计 初始条件:已知一单位反馈系统的开环传递函数是)2)(1()(++=s s s K s G 要求系统的静态速度误差系数110-≥S K v ,ο45≥γ。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 MATLAB 作出满足初始条件的最小K 值的系统伯德图,计算系统的幅值裕量和相位裕量。
2、前向通路中插入一相位滞后-超前校正,确定校正网络的传递函数。
3、用MATLAB 画出未校正和已校正系统的根轨迹。
4、用Matlab 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
5、课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日MATLAB是一个包含大量计算算法的集合。
其拥有600多个工程中要用到的数学运算函数,可以方便的实现用户所需的各种计算功能。
函数中所使用的算法都是科研和工程计算中的最新研究成果,而前经过了各种优化和容错处理。
在通常情况下,可以用它来代替底层编程语言,如C和C++。
在计算要求相同的情况下,使用MATLAB的编程工作量会大大减少。
MATLAB的这些函数集包括从最简单最基本的函数到诸如矩阵,特征向量、快速傅立叶变换的复杂函数。
函数所能解决的问题其大致包括矩阵运算和线性方程组的求解、微分方程及偏微分方程的组的求解、符号运算、傅立叶变换和数据的统计分析、工程中的优化问题、稀疏矩阵运算、复数的各种运算、三角函数和其他初等数学运算、多维数组操作以及建模动态仿真等。
此次课程设计就是利用MATLAB对一单位反馈系统进行滞后-超前校正。
基于matlab的自控课设 精品
摘要串联滞后-超前校正兼有滞后校正和超前校正的优点,即已校正系统的响应速度较快,超调量较小,抑制高频噪声的性能也较好。
当校正系统不稳定,且要求校正后系统的响应速度,相角裕度和稳态精度较高时,以采用串联滞后-超前校正为宜。
其基本原理是利用滞后-超前网络的超前部分来增大系统的相角裕度,同时利用滞后部分来改善系统的稳态性能。
此次课程设计就是利用MATLAB对一单位反馈系统进行滞后-超前校正。
通过运用MATLAB的相关功能,绘制系统校正前后的伯德图、根轨迹和阶跃响应曲线,并计算校正后系统的时域性能指标。
关键字:超前-滞后校正 MATLAB 伯德图时域性能指标目录摘要 21 设计要求及方法 5 1.1 设计要求 51.2 设计方法 52 滞后-超前校正设计目的和原理 5 2.1 滞后-超前设计目的 52.2 滞后=超前设计原理63 滞后-超前校正的设计过程7 3.1 校正前参数73.1.1 用MATLAB绘制校正前系统的伯德图73.1.2 用MATLAB求校正前系统的幅值裕量和相位裕量83.1.3 用MATLAB绘制校正前系统的根轨迹93.1.4 对校正前系统进行仿真分析10 3.2 滞后-超前校正设计参数计算113.2.1利用MATLAB计算出滞后校正器的传递函数113.2.2 利用MATLAB计算出超前校正器的传递函数11 3.3 滞后-超前校正的验证133.3.1 用MATLAB求校正后系统的幅值裕量和相位裕量133.3.2 用MATLAB求校正后系统的伯德图143.3.3 用MATLAB求校正后系统的根轨迹153.3.4 用MATLB对校正后的系统进行仿真分析164 传递函数特征根的计算17 4.1 校正前系统的传递函数的特征根174.2 校后前系统的传递函数的特征根185 系统动态分析18 5.1 校正前系统的动态性能分析185.2 校正后系统的动态性能分析236 系统的根轨迹分析26 6.1 校正前系统的根轨迹分析266.2 校正后系统的根轨迹分析287 系统的幅相特性30 7.1 校正前系统的幅相特性307.2 校正后系统的幅相特性318 系统的对数幅频特性及对数相频特性32 8.1 校正前系统的对数幅频特性及对数相频特性328.2 校正后系统的对数幅频特性及对数相频特性339 心得体会35 参考文献351设计要求及方法1.1设计要求 已知单位负反馈系统的开环传递函数0()(1)(0.251)K G S S S S =++,试用频率法设计串联校正装置,要求校正后系统的静态速度误差系数1v K 5s -≥,系统的相角裕度045γ≥,校正后的剪切频率2C rad s ω≥。
自控课设MATLAB超前滞后校正
自控课设MATLAB超前滞后校正武汉理工大学《自动控制原理》课程设计说明书课程设计任务书学生姓名:张弛专业班级:电气1002班指导教师:刘志立工作单位:自动化学院题目: 用MATLAB进行控制系统的滞后-超前校正设计初始条件:已知一单位反馈系统的开环传递函数是G(s)?Ks(s?1)(s?2)要求系统的静态速度误差系数Kv?10S?1,??45?。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 MATLAB作出满足初始条件的最小K值的系统伯德图,计算系统的幅值裕量和相位裕量。
2、前向通路中插入一相位滞后-超前校正,确定校正网络的传递函数。
3、用MATLAB画出未校正和已校正系统的根轨迹。
4、用Matlab对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
5、课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。
说明书的格式按照教务处标准书写。
时间安排:任务审题、查阅相关资料分析、计算编写程序撰写报告论文答辩时间(天) 1 3 1 2 0.5指导教师签名: 年月日系主任(或责任教师)签名: 年月日武汉理工大学《自动控制原理》课程设计说明书目录摘要 (3)1基于频率响应法校正设计概述 (4)2串联滞后-超前校正原理及步骤 (5)2.1滞后超前校正原理 (5)2.2滞后-超前校正的适用范围 (6)2.3串联滞后-超前校正的设计步骤 ........................................... 6 3串联滞后-超前校正的设计 (7)3.1待校正系统相关参数计算及稳定性判别 (7)3.1.1判断待校正系统稳定性 (7)3.1.2绘制待校正系统的伯德图 (8)3.1.3绘制待校正系统的根轨迹图 (9)3.1.4绘制待校正系统的单位阶跃响应曲线 (10)3.1.5利用SIMULINK进行控制系统建模仿真 (11)3.2滞后超前-网络相关参数的计算 (12)3.3对已校正系统的验证及稳定性分析 (15)3.3.1绘制已校正系统的伯德图 (15)3.3.2判断已校正系统的稳定性 (16)3.3.3绘制已校正系统的根轨迹图 (17)3.3.4绘制已校正系统的单位阶跃响应曲线 (18)3.3.5利用SIMULINK进行控制系统建模仿真 (19)3.3.6串联滞后-超前校正设计小结 ...............................................20 4心得体会 .................................................................21 参考文献 ...................................................................21 附录 (22)武汉理工大学《自动控制原理》课程设计说明书摘要随着科学技术的不断向前发展,人类社会的不断进步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
滞后-超前校正——课程设计一、设计目的:1. 了解控制系统设计的一般方法、步骤。
2. 掌握对系统进行稳定性的分析、稳态误差分析以及动态特性分析的方法。
3. 掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
4. 提高分析问题解决问题的能力。
二、设计内容与要求:设计内容:1. 阅读有关资料。
2. 对系统进行稳定性分析、稳态误差分析以及动态特性分析。
3. 绘制根轨迹图、Bode 图、Nyquist 图。
4. 设计校正系统,满足工作要求。
设计条件:1、被控制对象的传递函数是m m 1m 2012mn sn 1n 2012nb s b s b s b ()a s a a s a G S ----+++⋯+=+++⋯+(n≥m)2、参数a0,a1,a2,...an和b0,b1,b2,...bm因小组而异。
设计要求:1. 能用MATLAB 解复杂的自动控制理论题目。
2. 能用MATLAB 设计控制系统以满足具体的性能指标。
3. 能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能。
三、设计步骤:1、自学MATLAB软件的基本知识,包括MATLAB的基本操作命令。
控制系统工具箱的用法等,并上机实验。
2、基于MALAB用频率法对系统进行串联校正设计,使其满足给定的领域性能指标。
要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T,α等的值。
已知开环传递函数为G(S)= 0(2)(40)k s s s ++,使用频率法设计串联滞后—超前校正装置,使系统的相角裕度大于等于40°,静态速度误差系数等于20。
校正前根据上式可化简G(S)= 00.0125(0.51)(0.0251)k s s s ++,所以公式G(S)=20(0.51)(0.0251)s s s ++,所以=1,则c w = 6.1310,相角裕度γ为9.3528。
校正后串联校正滞后—超前校正装置2121(1)(1)()(1)(1)C bT S aT S G S T S T S ++=++, 由111(~)510C W bT =,取2211*60.8335bT bT =⇒=,又由20lg 2020lg520lg 4a a -=⇒=,121aT =,10.125T =;10.25ab b =⇒=;1 1.22 3.332T bT =⇒= 所以校正后的函数为 (10.833)(10.5)20()(10.125)(1 3.33)(0.51)(0.0251)C S S G S S S s s s ++=++++3、利用MATLAB函数求出校正前与校正后系统的特征根,并判断其系统是否稳定,为什么? 校正前>> % MATLAB PROGRAM j005.m >> %>> num=[20];den= conv([1 0],conv([0.5 1],[0.025 1])); g=tf(num,den);sys=feedback(g,1); pzmap(g);den= conv([1 0],conv([0.5 1],[0.025 1])); t=tf(num,den); pzmap(t);[p,z]=pzmap(g); den=sys.den{1}; r=roots(den);disp(r)-41.0006-0.4997 + 6.2269i-0.4997 - 6.2269i系统没有零极点在右边,所以系统开环稳定。
校正后>> % MATLAB PROGRAM j005.m%num=conv([0.833 1],[6.6 20]);d3=conv([0.5 1],conv([0.025 1],[1 0]));d2=conv([0.125 1],[3.33 1]);den=conv([0 d3],[0 d2]);g=tf(num,den);sys=feedback(g,1);pzmap(g);conv([0.5 1],conv([0.025 1],[1 0]));d2=conv([0.125 1],[4 1]);den=conv([0 d3],[0 d2]);t=tf(num,den);pzmap(t);[p,z]=pzmap(g);den=sys.den{1}; r=roots(den); disp(r)-40.7534 -4.8304 -1.6921 + 3.4339i -1.6921 - 3.4339i -1.3324极点和特征根都在左半平面,故系统稳定4、利用MATLAB作出系统校正前与校正后的单位脉冲响应曲线,单位阶跃响应曲线,单位斜坡响应曲线,分析这三种曲线的关系?求出系统校正前与校正后的动态性能指标Ϭ%,tr,tp,ts,e ss ,并分析其有何变化?脉冲响应校正前>> % MATLAB PROGRAM j005.m >> %>> k=20;n1=1;d1=conv([1 0],conv([0.5 1],[0.025 1])); >> s1=tf(k*n1,d1);sys=feedback(s1,1);impulse(sys)校正后>> % MATLAB PROGRAM j005.m>> %>> k=conv([0.833 1],[0.4 1]);n1=20;d3=conv([0.5 1],conv([0.025 1],[1 0]));d2=conv([3.33 1],[0.125 1]);d1=conv([0 d3],[0 d2]);s1=tf(k*n1,d1);sys=feedback(s1,1);impulse(sys)阶跃响应校正前>> % MATLAB PROGRAM j005.m>> %>> k=20;n1=1;d1=conv([1 0],conv([0.5 1],[0.025 1])); >> s1=tf(k*n1,d1);figure(2);sys=feedback(s1,1);step(sys)由图可知:Ϭ%=76%,tr=0.272-0.093=0.179,tp=0.506,ts=6.09,e ss=1-1=0校正后>> % MATLAB PROGRAM j005.m%k=conv([0.833 1],[0.4 1]);n1=20;d3=conv([0.025 1],conv([0.125 1],[1 0]));d2=conv([0.5 1],[3.33 1]);d1=conv([0 d3],[0 d2]);s1=tf(k*n1,d1);>> figure(2);sys=feedback(s1,1);step(sys)由图可知:Ϭ%=36%,tr=0.384-0.109=0.275,tp=0.697,ts=1.27,e ss=1-1.01=-0.01斜坡响应校正前>> % MATLAB PROGRAM j005.m>> %>> k=20;n1=1;d1=conv([1 0 0],conv([0.5 1],[0.025 1]));>> s1=tf(k*n1,d1);figure(2);sys=feedback(s1,1);step(sys)校正后>> % MATLAB PROGRAM j005.m>> %>> k=conv([0.833 1],[0.4 1]);n1=20;d3=conv([0.5 1],conv([0.025 1],[1 0]));d2=conv([3.33 1],[0.125 1]);d4=conv([0 d3],[0 d2]);d1=conv([0 d4],[1 0]);>> s1=tf(k*n1,d1);figure(2);sys=feedback(s1,1);step(sys)三条曲线关系:斜坡响应曲线的导数是阶跃,阶跃响应曲线的导数是脉冲响应曲线。
5、绘制系统校正前与校正后的根轨迹图,并求其分离点,汇合点及虚轴交点的坐标和相应点的增益K*值,得出系统稳定时增益K*的变化范围。
绘制系统校正前与校正后的Nyquist图,判断系统的稳定性,并说明理由。
校正前>> % MATLAB PROGRAM j005.m>> %>> num=20;>> den=conv([1 0],conv([0.5 1],[0.025 1]));>> g0=tf(num,den);rlocus(g0)分离点 -0.987,无汇合点,虚轴交点的坐标 0.129 9.37j和相应点的增益K* =0.0244校正后>> % MATLAB PROGRAM j005.m%d3=conv([0.5 1],conv([0.025 1],[1 0]));d2=conv([0.125 1],[3.33 1]);den=conv([0 d3],[0 d2]);num=20;g0=tf(num,den);rlocus(g0)分离点 -6.23,汇合点 0 虚轴交点的坐标没有,相应点的增益K*=0校正前>> % MATLAB PROGRAM j005.m>> %>> k=20;n1=1;d1=conv([1 0],conv([0.5 1],[0.025 1]));>> s1=tf(k*n1,d1);nyquist(s1)判断稳定性:已知,开环不稳定极点个数P=0, 又Nyquist曲线包围(-1,j0)点两圈,所以系统不稳定校正后>> % MATLAB PROGRAM j005.m>> %>> k=conv([0.4 1],[0.833 1]);n1=20;d3=conv([0.5 1],conv([0.025 1],[1 0]));d2=conv([0.125 1],[3.33 1]);d1=conv([0 d3],[0 d2]);s1=tf(k*n1,d1);nyquist(s1)判断稳定性:已知,开环不稳定极点个数P=0,又Nyquist曲线不包围(-1,j0)点,所以系统稳定6、绘制系统校正前与校正后的Bode图,计算系统的幅值裕量,相位裕量,幅值穿越频率和相位穿越频率。
判断系统的稳定性,并说明理由?Bode图校正前>> % MATLAB PROGRAM j005.m>> %>> k=20;n1=1;d1=conv([1 0],conv([0.5 1],[0.025 1]));>> s1=tf(k*n1,d1);[GM,PM,WCP,WCG]=margin(s1)GM =2.1000PM =9.3528WCP =8.9443WCG =6.1310幅值裕量:2.1 相位裕量:9.3528幅值穿越频率:8.9443 相位穿越频率:6.1310>> % MATLAB PROGRAM j005.m>> %>> k=20;n1=1;d1=conv([1 0],conv([0.5 1],[0.025 1]));>> s1=tf(k*n1,d1);figure(1);margin(s1);hold on开环极点P=0,在L(ω)>0dB的频率范围内,对应的ϕ(ω)对-π线的正穿越都一次,所以系统不稳定。