最新理论力学第七章点的合成运动(哈工大第七版版)
哈工大理论力学教研室《理论力学Ⅰ》(第7版)课后习题-点的合成运动(圣才出品)
图 7-4 解:以 M 为动点,水轮为动系,牵连运动轨迹为定轴转动,速度分析如图 7-5 所示。
图 7-5 由 va = ve + vr 在 x、y 两个方向上的分量得
va sin 60o = ve + vr sin va cos 60o = vr cos
7 / 42
圣才电子书
图 7-1
图 7-2
7-2 图 7-2 中的速度平行四边形有无错误?错在哪里?
1 / 42
圣才电子书 十万种考研考证电子书、题库视频学习平台
答:都有错误,改正见图 7-3。
图 7-3 7-3 如下计算对不对?错在哪里?
图 7-4 (a)图 7-4(a)中取动点为滑块 A,动参考系为杆 OC,则 ve=ω·OA,va=cosφ (b)图 7-4(b)中 vBC=ve=vacos60°va=ωr 因为 ω=常量,所以,VBC=常量, (c)图 7-4(c)中为了求 aa 的大小,取加速度在 η 轴上的投影式:aacosφ-ac=0 所以 答:(a)不对,va 的速度平行四边形画法不正确,正确图见图 7-5。 (b)加速度的计算不正确。vBC 和 ω 为此瞬时的大小,不是任意时刻的速度和角速度 故不能对时间求导。
其中 ρ 和 φ 是用极坐标表示的点的运动方程,aρ 和 aψ 是点的加速度沿极径和其垂直 方向的投影。
答:如图 7-7 建立直角坐标系.xOy 与极坐标系 ρOφ。 取动点 Q,动系 OA
4 / 42
圣才电子书
加速度合成(图 7-8)
十万种考研考证电子书、题库视频学习平台
aa=aen+aet+ar+ac
大小:?
方向:Hale Waihona Puke √ √ √ √图 7-7
07-理论力学-第二部分运动学第七章点的合成运动
运动学/点的合成运动
动 点: AB杆上的A点 动 系: 凸轮 定 系: 地面 绝对运动: 直线 相对运动:曲线(圆弧) 牵连运动: 直线平移
1616
运动学/点的合成运动
动 点:A(在AB杆上) 动 系:偏心轮C 定 系: 地面 绝对运动:直线 相对运动:圆周(C) 牵连运动: 定轴转动
22
运动学/点的合成运动
另一方面,在实际问题中,不仅要在固联在地面上 的参考系上还要在相对于地面运动着的参考系上观察和 研究物体的运动。下面先看几个例子。
33
运动学/点的合成运动
44
55
本章将用点的合成运动的方法来研究这类问题。 66
第七章 点的合成运动
§7-1 §7-2 §7-3
§7-4
r 2
r 2
r2
l2
r2
l 2(
) 3030
运动学/点的合成运动
例4 圆盘凸轮机构
已知:OC=e ,R 3e ,(匀角速度),图示瞬时, OCCA,且O,A,B三点共线。求:从动杆AB的速度。
解:选取动点:AB 上的A点
动系:圆盘
绝对运动:直线 相对运动:圆周
由
定系:基座 va
牵连运动:定轴 ve vr
▼动点相对动系、定系必须 有运动,不能和动系在同一 物体上。
▼以上可归结为一点、两系 、三运动。
2020
运动学/点的合成运动
四、 运动方程及坐标变换 可以利用坐标变换来建立绝对、
相对和牵连运动之间的关系。
以二维问题为例。设定系 ,
动系
。动点M,如图所示。
(1)绝对运动方程: x x(t), y y(t)
大小 ? OA
最新理论力学第七章点的合成运动(哈工大第七版版)
车刀刀尖的运动
相对某一参考体的运动可由相对于其他参考体的几个运 动的组合而成-合成运动。
§7-1 相对运动·牵连运动·绝对运动 定坐标系(定系)
两个坐标系 动坐标系(动系) 绝对运动:动点相对于定系的运动。
三种运动 相对运动:动点相对于动系的运动。 牵连运动:动系相对于定系的运动。
v r v a 2 v e 2 2 v a v e c6 o 0 3 . s 6 m s
arcvsesiin 6n (0 )46 12
vr
例7-6 已知:圆盘半径为R,以角速度ω1绕水平轴CD转动, 支承CD的框架又以角速度ω2绕铅直的AB轴转动,如图所示。 圆盘垂直于CD,圆心在CD与AB的交点O处。
OA=r,两轴间距离OO1=l。求:曲柄在水平位置时摇杆的
角速度w1。
解: 1.动点:滑块 A 动系:摇杆 O1B
OA l2r2
2.运动分析:
绝对运动-绕 O 点的圆周运动;
相对运动-沿O1B的直线运动;
牵连运动-绕 O1 轴定轴转动。
3.
vavevr
大小 rw ? ?
方向 √ √ √
vevasijnrw
2.绝对运动:直线运动(AB)
相对运动:圆周运动(半径R)
牵连运动:定轴运动(轴O)
3.
va ve vr
大小 ? wOA ?
方向 √ √
√
vaveco twOO A e A we
例7-5 已知:矿砂从传送带A落入到另一传送带B上,如图所示。
站在地面上观察矿砂下落的速度为 v1=4m/s ,方向与铅直线成30º 角。传送带B水平传动速度 v2=3m/s 。 求:矿砂相对于传送带B 的速度。
哈尔滨工业大学 第七版 理论力学 第7章 课后习题答案
ω 2 d = ω1r
ω2 =
=
(2)轮 B 作定轴转动,当 d = r 时轮缘上 1 点的加速度可如下求得:
5 000π rad/s 2 2 d
图 7-6
r ω1 = ω 1 = 20π rad/s d 5 × 10 3π 5 × 10 3π α2 = = = 2π rad/s 2 2 2 d r
7-12 图 7-11a 所示 1 飞轮绕固定轴 O 转动,其轮缘上任 1 点的全加速度在某段运动过程中与轮 半径的交角恒为 60°,当运动开始时,其转角 ϕ 0 等于零,角速度为 ω 0 。求飞轮的转动方程以及角 速度与转角的关系。
M
at
θ
an
(a) 图 7-11 (b)
a
83
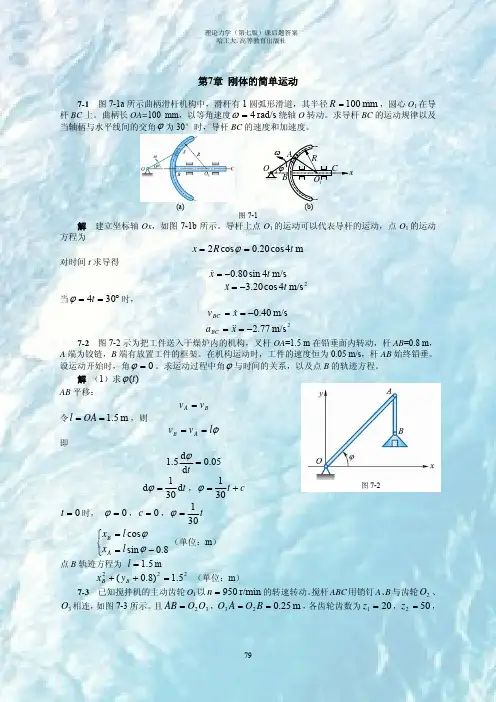
理论力学(第七版)课后题答案 哈工大.高等教育出版社
v A = vB & v B = v A = lϕ
dϕ = 0.05 dt 1 1 图 7-2 dϕ = dt , ϕ = t + c 30 30 1 t = 0 时, ϕ = 0 , c = 0 , ϕ = t 30 ⎧ x B = l cos ϕ (单位:m) ⎨ ⎩ x A = l sin ϕ − 0.8 点 B 轨迹方程为 l = 1.5 m 2 xB + ( y B + 0.8) 2 = 1.5 2 (单位:m) 7-3 已知搅拌机的主动齿轮 O1 以 n = 950 r/min 的转速转动。 搅杆 ABC 用销钉 A、 B 与齿轮 O2 、 O3 相连, 如图 7-3 所示。 且 AB = O2 O3 ,O3 A = O2 B = 0.25 m , 各齿轮齿数为 z1 = 20 ,z 2 = 50 , 1.5
纸盘的角速度
− 2π dr a
理论力学第七章
例题
点的复合运动
例 题 7-1
3. 速度分析。
绝对速度va:va=OA · =r ω ,方 ω 向垂直于OA,沿铅垂
方向向上。
牵连速度ve:ve为所要求的未知量, 方向垂直于O1B 。 相对速度vr:大小未知,方向沿摇杆 O1B 。 应用速度合成定理
va ve vr
13
例题
点的复合运动
2. 运动分析。 绝对运动-以O为圆心的圆周运动。 相对运动-沿杆BC直线运动。 牵连运动-平动。
24
ω0
O
30
C
例题
点的复合运动
例 题 8-10
3. 速度分析。
α
ω
60
绝对速度va:va = ω0 r,垂直于OA向下。
D A E 牵连速度ve: ve= vB,垂直于BD向右下。
B
vr vB v a
a
a
n ae sin 30 cos 30
2 3o l r 3l
所以杆BD的角加速度
t ae l
2 3 o r (l r )
3l 2
27
例题
点的复合运动
习题课
28
第七章
一、基本概念
点的合成运动习题课
1.一个动点,两个坐标系,三种 运动 2.速度合成定理
v2 B
v1
30
vr 与 va 的夹角 ve
60
M
β
ve sin 60 46 12 arcsin vr
va
vr
18
§7-3点的加速度合成定理
先分析 k’ 对时间的导数。
' drA rA rO k vA e rA dt ' ' drO dk e (rO k ) dt dt 因为 v drO r O e O dt
理论力学第7章(点的合成运动)
点的速度合成定理是瞬时矢量式,共包括大小‚方向
六个元素,已知任意四个元素,就能求出其他两个。 二、应用举例
[例] 桥式吊车 已知:小
车水平运行,速度为v平, 物块A相对小车垂直上升 的速度为v。求物块A的 运行速度。
解:选取动点: 物块A 动系: 小车 静系: 地面 相对运动: 直线; 相对速度vr =v 方向 牵连运动: 平动; 牵连速度ve=v平 方向 绝对运动: 曲线; 绝对速度va 的大小, 方向待求。
由速度合成定理 va= vr+ ve , 作出速度平行四边形 如图示。
v a v e tg 30 0 2 3 e 3 v AB 2 3 e ( ) 3
动点:AB杆上的A点 动系:偏心轮
绝对运动:直线 相对运动:圆周(曲线) 牵连运动:定轴转动
铰接四边形O1A=O2B=100mm, O1O2=AB,杆 O1A以等角速度 ω =2rad/s绕轴O1转动。 AB杆上有一套筒C,此套筒与杆CD相铰接 ,机构的各部件都在同一铅垂平面内。
)
[例3] 圆盘凸轮机构 已知:OC=e , R 3e , (匀角速度) 图示瞬时, OCCA 且 O、A、B三点共线。 求:从动杆AB的速度。
解:动点取直杆上A点,动系固结于圆盘, 静系固结于基座。 绝对速度 va = ? 待求,方向//AB 相对速度 vr = ? 未知,方向CA 牵连速度 ve =OA=2e , 方向 OA
y
O C
x
x
合成运动:相对某一参考体的运动可由相对于其它参考 体的几个运动组合而成,称这种运动为合成运动
动点:要研究的点
两个参考系: 一般把固定在地球上的坐标系称为静参考系; 用 Oxyz表示; 固定在相对地球运动的参考体上的坐标系称为动参考系; 用 Oxyz 表示。
理论力学第七版第07章(1-2节)--点的合成运动 (2)
绝对运动:圆周运动 相对运动:直线运动(沿O1B) 牵连运动:定轴转动(绕O1轴) 2.速度
va ve vr r
√
大小
? ?
√
rl v r v a cos 2 l r2
方向 √
r 2 v e v a sin 2 l r2
ve ve r 2 1 2 2 2 O1 A l r2 l r
(7-15)
aa ar α r ω ω r 2ω vr
(7-18)
§7-4 牵连运动是定轴转动时点的加速度合成定理
设动系作定轴转动,转轴通过点O´,其角速度矢量为
aa ar α r ω ω r 2ω vr
v a rO xi yj z k xi yj zk
va ve v r
aa ae ar
例7-7
已知:如图所示平面机构中,铰接在曲柄端 A 的滑块,可 在丁字形杆的铅直槽DE内滑动。设曲柄以角速度ω作匀速 转动, OA r 。
回顾: 2.矢积表示绕定轴转动刚体上点的速度和加速度
dv d 加速度 a r dt dt
→
d dr r dt dt
r v
(6-21)
→
→ → →
科里奥利,法国物理学家。
1792年5月21日生于巴黎;1843年9月19日卒于巴黎。 科里奥利是巴黎工艺学院的教师,长期健康状况不佳,这 限制了他创造能力的发挥。即便如此,他的名字在物理学 中仍是不可磨灭的。 1835年,他着手从数学上和实验上研 究自旋表面上的运动问题。地球每 24 小时自转一周。赤道 面上的一点,在此时间内必须运行25,000英里,因此每小 时大约向东运行 1,000英里。在纽约纬度地面上的一点, 一天只需行进19,000英里,向东运行的速度仅约为每小时 800英里。由赤道向北流动的空气,保持其较快的速度,因 此相对于它下面运动较慢的地面而言会向东行。水流的情 况也是一样。因此,空气和水在背向赤道流动时好像被推 向东运动,反之会向西运动,这样会形成一个圆! 推动它们运动的力就称为科里奥利力。 这种力不是真实存在的 ! 只是 “ 惯性 ” 这种性质的表现而已。 正是这种"力"造成了飓风和龙卷风的旋转运动。研究大炮射 击、卫星发射等技术问题时,必须考虑到这种力。
理论力学《点的合成运动》答案
4
动系:固连于CBDE上的坐标系。 动系平动, v A = v CBDE = v BC 静系:固连于地面的坐标系。 绝对速度:A相对于地面的速度。 相对速度:A相对于DE的速度。 牵连速度:CBDE相对于地面的速度。
→ → →
vr
900 − ϕ A
120 0
va
ϕ
ve = vBC
ϕ O
5
相对速度:C相对于OC杆的速度。 牵连速度:OC杆相对于地面的速度。
ve = OC ⋅ ω =
→ → →
0.4 × 0.5 = 0.231( m / s ) cos 30 0
va = ve + vr va = ve 0.2 = = 0.267( m / s ) 0 cos 30 cos 2 30 0
BC作平动,故
v BC = v a = 1.155lω 0
[习题7-9] 一外形为半圆弧的凸轮A,半径r=300mm,沿水平方向向右作匀加速运动, 其加速度aA=800mm/s 。凸轮推动直杆BC沿铅直导槽上下运动。设在图所示瞬时, vA=600mm/s,求杆BC的速度及加速度。 解: 动点:B。 动系:固连于凸轮A上的坐标系。 静系:固连于地面的坐标系。 绝对速度:B相对于地面的速度。 相对速度:B相对于凸轮的速度。 牵连速度:B相对于凸轮的速度。
θ = 40.930
→ →
即 v 与 v1 之间的夹角为 θ = 40.93 。 种子走过的水平距离为:
0
s = v x t = v cos θ ⋅ t h = vyt +
1 2 gt 2 1 2 gt 2
h = v sin θt +
0.25 = 2.65 sin 40.930 t + 0.5 × 9.8t 2
理论力学答案(第七章后)
第七章 点的合成运动一、是非题7.1.1动点的相对运动为直线运动,牵连运动为直线平动时,动点的绝对运动必为直线运动。
( × )7.1.2无论牵连运动为何种运动,点的速度合成定理r e a v v v +=都成立。
( ∨ )7.1.3某瞬时动点的绝对速度为零,则动点的相对速度和牵连速度也一定为零。
( × )7.1.4当牵连运动为平动时,牵连加速度等于牵连速度关于时间的一阶导数。
( ∨ )7.1.5动坐标系上任一点的速度和加速度就是动点的牵连速度和牵连加速度。
( × )7.1.6不论牵连运动为何种运动,关系式a a +a a r e =都成立。
( × )7.1.7只要动点的相对运动轨迹是曲线,就一定存在相对切向加速度。
( × )7.1.8在点的合成运动中,判断下述说法是否正确:(1)若r v 为常量,则必有r a =0。
( × )(2)若e ω为常量,则必有e a =0. ( × )(3)若e r ωv //则必有0=C a 。
( ∨ )7.1.9在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相7.1.10当牵连运动为定轴转动时一定有科氏加速度。
( × )二、 填空题7.2.1 牵连点是某瞬时 动系上与7.2.2 v e 与v r 共线 情况下,动点绝对速度的大小为r e a v v v +=,在 情况下,动点绝对速度的大小为a v =v e 、v r ,应按___ ____ __ 计算v a三、选择题:7.3.1 动点的牵连速度是指某瞬时牵连点的速度,它相对的坐标系是( A )。
A 、 定参考系B 、 动参考系C 、 任意参考系7.3.2 在图示机构中,已知t b a s ωsin +=, 且t ωϕ=(其中a 、b 、ω均为常数),杆长为L ,若取小球A 为动点,动系固结于物块B ,定系固结于地面,则小球的牵连速度v e 的大小为( B )。
第7章_点的合成运动
§7-3 点的加速度合成定理
i'
x'
O' y
x
7.3.2 点的加速度合成公式的推导
y ) 2[ x i (ωe i ) y (ωe j) z k (ωe k )] 2( x j z i + y j z k ) 2ωe ( x 2ωe v vrr
§7-3 点的加速度合成定理
7.3.3 关于科氏加速度
定义 :
aC 2ωe vr aC 2ωe vr sin
ωe vr ωe // vr
—相对速度矢的 矢积的两倍。1832年科利奥里(法)研究水轮机发现。 大小:
方向: 其中为e与vr两矢量间的最小夹角。 矢aC垂直于e和vr,指向按右手法则确定。
e
aC 2ωe vr vr aC 0 工程中常见的平面机构中 e和vr是垂 。 直的,此时aC = 2evr;且vr按e转向转90
就是aC的方向。
§7-3 点的加速度合成定理
aC
习题课
1、习题分类 ① 机构传动问题中,求某点的速度、加速度或者 求某刚体的转动角速度、角加速度。 ② 单一动点运动的分解或合成问题。
必有。
3、某瞬时,牵连点与动系有无相对运动?
答 : 无。
§7-1 相对运动 ·牵连运动 ·绝对运动
7.1.1 三种运动的概念
练习一
动点:滑块A
A
动系:滑槽
ve
va
vr
A
aa
ar
A
ae n ar
§7-1 相对运动 ·牵连运动 ·绝对运动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
rw
l2r2
w1
ve r2w
O1A l2 r2
sinj r
l2 r2
例7-4 已知:如图所示半径为R、偏心距为e的凸轮,以角速 度ω绕O轴转动,杆AB能在滑槽中上下平移,杆的端点A始 终与凸轮接触,且OAB成一直线。求:在图示位置时,杆 AB的速度。
解: 1. 动点:AB杆上A 动系:凸轮
求:当连线OM在水平位置时,圆盘边缘上的点M的绝对速度。
解: 1.动点:M点 动系:框架 BACD 2.绝对运动:未知 相对运动:圆周运动(圆心O点)
3. 牵连运动:定 轴转动( AB轴) v a v e v r
大小 ? Rw2 Rw1
方向 ? √
√
ww v av e 2 vr2R1 222
arctvvaer)na( rctw wa1 2)n(
例7-2 已知:用车刀切削工件的直径端面,车刀刀尖M 沿水 平轴 x 作往复运动,如图所示。设Oxy为定坐标系,刀尖的运
动方程为x = b sin(wt)。工件以等角速度w 逆时针转向转动。
求:车刀在工件圆端面上切出的痕迹。
解: 动点:M 动系:工件 O x y
相对运动方程
x' O M c o sw t b sin w tc o sw t b sin 2 w t
M
lt i0m r t lt i0m r t lt i0m r t1
vavrve
M’
r r'
r1 M1
例7-4 已知:刨床的急回机构如图所示。曲柄OA的一端A与滑 块用铰链连接。当曲柄OA以匀角速度ω绕固定轴O转动时,滑 块在摇杆O1B上滑动,并带动杆O1B绕定轴O1摆动。设曲柄长为
absolute
relative
embroil
实例:回转仪的运动分析
动点:M点
动系:框架
相对运动:圆周运动 牵连运动:定轴转动 绝对运动:空间曲线运动
动画
vr
ve
相对轨迹
相对速度 vr 相对加速度 ar
牵连运动
牵连速度 ve 牵连加速度 ae
绝对轨迹
绝对速度 va 绝对加速度 aa
在动参考系上与动点相重合的那一点(牵连点)的速 度和加速度称为动点的牵连速度和牵连加速度。
7-5,7,8
§7-3牵连运动是平移时点的加速度合成定理
B
CA
D
O1 w O2 j
D
w
A
Oj
B
C
E
设动系作平移,由于 x'、y'、z' 各轴方向不变,故有
didjdk0 dt dt dt
ar
~ dvr
dt
dvr
dt
dve dt
dd v tO a O a e
从而有 a a d d v ta d d v te d d v tr a e a r
2
y OsM w itn b s2 iw tn b (1 c2 o w t)s 2
相对运动轨迹
x2 yb2 b2 2 4
§7-2 点的速度合成定理 例:小球在金属丝上的运动
z
O x
z y
x M2
绝对运动
M'
相对运动
M y
M1
牵连点的运动
速度之间的关系
r r ' r 1
z y
x M2
OA=r,两轴间距离OO1=l。求:曲柄在水平位置时摇杆的
角速度w1。
解: 1.动点:滑块 A 动系:摇杆 O1B
OA l2r2
2.运动分析:
绝对运动-绕 O 点的圆周运动;
相对运动-沿O1B的直线运动;
牵连运动-绕 O1 轴定轴转动。
3.
vavevr
大小 rw ? ?
方向 √ √ √
vevasijnrw
2.绝对运动:直线运动(AB)
相对运动:圆周运动(半径R)
牵连运动:定轴运动(轴O)
3.
va ve vr
大小 ? wOA ?
ቤተ መጻሕፍቲ ባይዱ
方向 √ √
√
vaveco twOO A e A we
例7-5 已知:矿砂从传送带A落入到另一传送带B上,如图所示。
站在地面上观察矿砂下落的速度为 v1=4m/s ,方向与铅直线成30º 角。传送带B水平传动速度 v2=3m/s 。 求:矿砂相对于传送带B 的速度。
相对运动方程
xOO1O1Mcos
yO1Msin
代入 vt r
绝对运动方程
y’ y v
CM
x’
r
w
Y
Aj
O1
x
OB
x r1cosvt
r
y r sin vt r
xxcojsysij nr1covrstcowtsrsin vrst iw nt
yxsij nycojsr1covrstsiw ntrsin vrct owts
练习:已知 w,a,小球的相对速度 u,OM=l。
求:牵连速度和牵连加速度
y x'
y'
M
Oj
x
绝对、相对和牵连运动之间的关系
动点:M 动系:O ' x ' y '
绝对运动运动方程 相对运动运动方程
x x t
y
y
t
x x t
y
yt
由坐标变换关系有 xyxyO Oxxcsoinsjjyyscionsjj
例7-1 已知:点M 相对于动系Ox'y'沿半径为r 的圆周以速度v 作 匀速圆周运动(圆心为O1 ) ,动系Ox'y' 相对于定系Oxy以匀角速
度w 绕点O 作定轴转动,如图所示。初始时 Oxy 与O'x'y' 重合,
点M与O 重合。求:点M 的绝对运动方程。
解:
动点: M点 动系: Ox'y'
解: 1.动点:矿砂 M
动系:传送带 B
2.绝对运动:直线运动( )v 1
牵连运动:平移( v )2
相对运动:未知
3.
va ve vr
大小 v1 v2 ?
方向 √ √ ?
y x
v ac6 o 0 s v e v rsi n 3) (0
v ac3 o s 0 v rco s 3( )0
v r v a 2 v e 2 2 v a v e c6 o 0 3 . s 6 m s
arcvsesiin 6n (0 )46 12
vr
例7-6 已知:圆盘半径为R,以角速度ω1绕水平轴CD转动, 支承CD的框架又以角速度ω2绕铅直的AB轴转动,如图所示。 圆盘垂直于CD,圆心在CD与AB的交点O处。
理论力学第七章点的合成 运动(哈工大第七版版)
车刀刀尖的运动
相对某一参考体的运动可由相对于其他参考体的几个运 动的组合而成-合成运动。
§7-1 相对运动·牵连运动·绝对运动 定坐标系(定系)
两个坐标系 动坐标系(动系) 绝对运动:动点相对于定系的运动。
三种运动 相对运动:动点相对于动系的运动。 牵连运动:动系相对于定系的运动。