自动控制理论基础左为恒周林主编机械工业出版社习题解
自动控制理论_习题集(附含答案解析)
三、作图题
51.已知单位负反馈系统开环传递函数 ,
(1)绘制闭环根轨迹;
(2)确定使闭环系统阶跃响应无超调的K值范围。
(1)由开环传递函数绘根轨迹如下图。
分离点的坐标d可由方程:
解得d1=-0.586,d2=-3.414
(2)将s=d1、s=d2分别代入根轨迹方程G(s)= –1求K值:
则:
对C(s)/R(s),前向通路有两条:
;没有与之不接触的回路:
;没有与之不接触的回路:
带入梅逊公式公式得:
对E(s)/R(s),前向通路有两条:
;有一不接触的回路:
;没有与之不接触的回路:
带入梅逊公式公式得:
27.一个回路:
,
无互不接触的回路,则:
对C(s)/R(s),前向通路有两条:
;没有与之不接触的回路:
A.图(a)B.图(b)
C.图(c)D.图(d)
22.当ω从−∞→+∞变化时惯性环节的极坐标图为一个(B)。
A.位于第一象限的半圆B.位于第四象限的半圆
C.整圆D.不规则曲线
23.下列串联校正环节中属于滞后校正的是(A)。
A. B.
C. D.
24.下列环节中属于PI校正的是(C)。
A. B.
C. D.K(1+Ts)
由 ,得K=11.656;
由 ,得K=0.34
闭环根位于实轴上时阶跃响应无超调,综合得K取值范围:
K>11.656,K<0.34
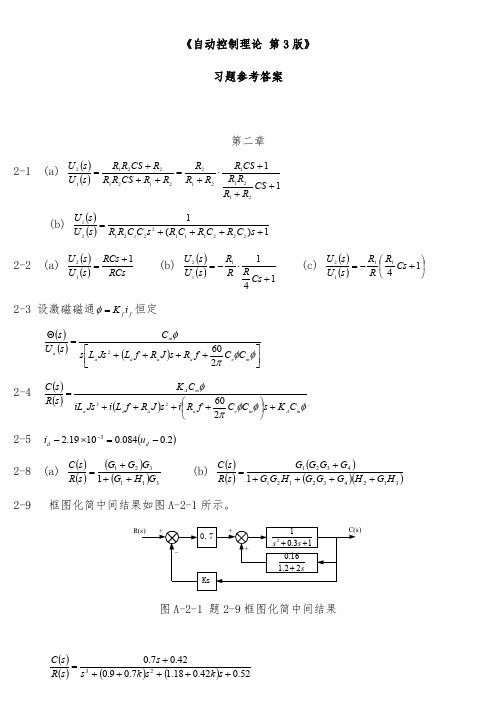
52.已知G(s)H(s)= ,绘制K从0到∞的闭环根轨迹,确定分离点坐标、渐近线方程,判断闭环系统稳定性。
53.某单位负反馈系统的开环传递函数为 ,试
自动控制理论基础(1)
比例环节: 成比例地反映控制系统的偏差信号 e(t)。偏差一旦产生,控制器立即产生 控制作用,以减少偏差。
不能消除稳态误差。 比例系数加大会引起系统的不稳定。
4.3 比例-积分-微分控制
积分环节: 用于消除静差,强弱取决于积分时
间常数。 越大积分作用越弱。积分作用太强会 使系统超调加大,甚至出现振荡。
4.2 开环与闭环控制
(4) 例—步进电机
方向 计 算 机 指令 脉冲 脉 冲 分 配 功 率 驱 动 步进 电机 工作台
4.2 开环与闭环控制
步进电机为执行元件。没有位置反馈。 每当向步进电机发出一个进给脉冲时,
步进电机的转子就在此脉冲所产生的同 步转矩下旋转一个固定的角度。
步进电机通过传动机构带动工作台移动。
4.3 比例-积分-微分控制
位置式PID控制算法是非递推形式的, 计算u(k)不仅需要本次及上次采样偏差 值e(k)和e(k-1),还需要e(0)到e(k)的所有 值。当k很大时,要占用很多内存,计 算机运算量大。
4.3 比例-积分-微分控制
增量式PID控制算法
u(k ) K P e(k ) K I e( j ) K D e(k ) e(k 1) u0
u(k ) K P e(k ) K I e( j ) K D e(k ) e(k 1) u0
j 0
k
KP—比例系数;KI—积分系数, KI = KP * T / TI ; KD—微分系数, KD = KP * TD / T ;T—采样周期。 k — 采样序号,k=0,1,2,… u(k) —第k次采样时刻的计算机输出值; e(k)—第k次采样时刻输入的偏差值。
《自动控制理论》作业集参考答案(专本科函授)第一部分.
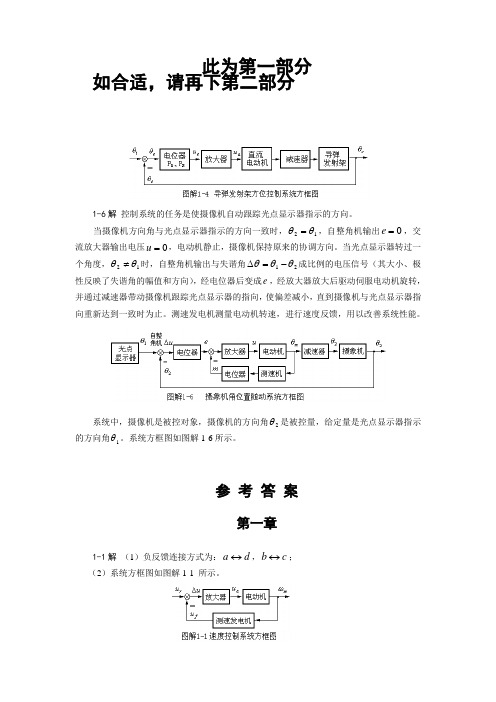
此为第一部分如合适,请再下第二部分1-6解 控制系统的任务是使摄像机自动跟踪光点显示器指示的方向。
当摄像机方向角与光点显示器指示的方向一致时,12θθ=,自整角机输出0=e ,交流放大器输出电压0=u ,电动机静止,摄像机保持原来的协调方向。
当光点显示器转过一个角度,12θθ≠时,自整角机输出与失谐角21θθθ-=∆成比例的电压信号(其大小、极性反映了失谐角的幅值和方向),经电位器后变成e ,经放大器放大后驱动伺服电动机旋转,并通过减速器带动摄像机跟踪光点显示器的指向,使偏差减小,直到摄像机与光点显示器指向重新达到一致时为止。
测速发电机测量电动机转速,进行速度反馈,用以改善系统性能。
系统中,摄像机是被控对象,摄像机的方向角2θ是被控量,给定量是光点显示器指示的方向角1θ。
系统方框图如图解1-6所示。
参 考 答 案第一章1-1解 (1)负反馈连接方式为:d a ↔,c b ↔; (2)系统方框图如图解1-1 所示。
1-3解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
自动控制理论 机械工业出版社 课后习题答案 夏德岑_第三版 PDF可打印
, t 0
比较上述两种情况, 可见有 z 1 零点时, 单位脉冲响应的振幅较无零点时小, 而且产生相移, 相移角为 arctg
1 2 n 。 1 n
2.单位阶跃响应 (a) 无零点时
ct 1
2 n t 1 2 t arctg 1 e sin n 1 2
G( s) 2a ss (2 a) s (2 2a)
2
根据条件(1) ,可得
Kv 1 2a 0.5 esr 2 2a
解得 a 1 ,于是由系统的开环传递函数为
G( s) 2 ss 3s 4
2
3-10
1M 2M
3t
s
p p
46.6%, t s 7.99s2%, ( n 2.12rad / s, 0.24) 16.3%, t s 8s2%, ( n 1rad / s, 0.5)
C m s 60 U a s s La Js 2 La f Ra J s Ra f C eC m 2
2-4
C s Rs
K A C m 60 iL a Js 3 iL a f Ra J s 2 i Ra f C eC m s K A C m 2
C 2 lim
s 0
d2 2(0.1s 2 s 10) 20(0.2s 1) 2 s lim 0 e s 0 ds 2 (0.1s 2 s 10) 3
(1)
s (t ) r (t ) R0 ,此时有 rs (t ) R0 , r r (t ) 0 ,于是稳态误差级数为 s esr t C0 rs (t ) 0 , t 0
自动控制理论基础(4)

K 1 (s + 5) G (s) = s ( s + 2 )( s + 3 )
两条渐近线, 1 n-m=2,两条渐近线,其参数为 两条渐近线 π a = ± σa = 0 2 A ' ( s ) B ( s ) B ' ( s ) A( s ) = 0
2
jω
s + 10s + 25s + 15 = 0
第4章 习题解 章
4-1 开环零、极点如图 开环零、极点如图E4-1所示 试绘制出相应 所示,试绘制出相应 所示 的概略根轨迹图。 的概略根轨迹图。
j j j
0
0
0
(a) )
(b) )
(c) )
1
j
j
j
0
0
0
(d) )
(e) ) 图E4-1
(f) )
2
4-2 单位反馈控制系统开环传递函数如下 试画 单位反馈控制系统开环传递函数如下,试画 出相应的闭环根轨迹图。 出相应的闭环根轨迹图。
3 2
-5
-3
-2
0
σ
用试探法求出会合点约为-0.9 用试探法求出会合点约为 时稳定。 3闭环特征方程如下,当K1>0时稳定。 闭环特征方程如下, 时稳定
s 3 + 5 s 2 + (6 + K 1 ) s + 5 K 1 = 0
4
K1 ( s + 20) ( 2) G ( s ) = s ( s + 10 + 10 j )( s + 10 10 j )
d1
5 2.17 ∵ β = sin = 38.3 5
1
∴ ζ = cos 38.3 = 0.824
自动控制理论课后习题详细解答答案(夏德钤翁贻方版)第五章

第五章5-1 已知单位反馈系统的开环传递函数,试绘制其开环频率特性的极坐标图(1)解:幅频特性:相频特性:列表取点并计算。
0.5 1.0 1.5 2.0 5.010.01.790.7070.370.2240.0390.0095-116.6-135-146.3-153.4-168.7-174.2系统的极坐标图如下:(2)解:幅频特性:相频特性:列表取点并计算。
00.20.50.8 1.0 2.0 5.010.910.630.4140.3170.1720.01950-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如下:(3)解:幅频特性:相频特性:列表取点并计算。
0.20.30.51254.55 2.74 1.270.3170.0540.0039-105.6-137.6-161-198.4-229.4-253系统的极坐标图如下:(4)解:幅频特性:相频特性:列表取点并计算。
0.20.250.30.50.60.8122.7513.87.86 2.520.530.650.317-195.6-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如下:5-2 试绘制上题中各系统的开环对数频率特性(伯德图)。
(1)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,在处与=20=0相交。
环节的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示:(2)解:伯德图起始为0dB线,的交接频率,斜率下降20dB/dec,变为-20dB/de c。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示。
(3)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,其延长线在=1处与=20=0相交。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
的交接频率,斜率下降20dB/dec,变为-60dB/de c。
自控原理习题解答
②R(s)和N(s)同时作用时系统的输出
∴ C(s) = CR (s) + CN (s)
=
G1G2 + G1G3 + G1G2G3H1
R(s) +
1+ G1G3 + G2H1 + G1G2 + G1G2G3H1
+ 1+ G2H1 + G1G2G4 + G1G3G4 + G1G2G3G4H1 N (s) 1+ G1G3 + G2H1 + G1G2 + G1G2G3H1
s(s + 1)
Kts
1.试分析速度反馈系数Kt对系统稳定性的影响。 2.试求KP、Kv、Ka并说明内反馈对稳态误差的影响。 解: 1.如果没有内反馈,系统的开环和闭环传递函数为
解:将系统开环传递函数与二阶系统典型开环传递函
数比较: 所以:
G(s) =
ωn2
s(s + 2ζωn )
ωn = 10K
2ζωn = 10 ζωn = 5
ζ= 5
10K
−πζ
σ = e 1−ζ 2 ×100%
tp
=π ωd
=
ωn
π 1−ζ 2
tS
(5%)
≈
3
ζωn
分别将K=10 ,K=20代入计算,结果如下:
10K1 = 10 1 + 10 K 2
解之得:K2=0.9 K1=10
Ø 3-4 单位反馈系统的开环传递函数为
G(s) = K = 10K s(0.1s + 1) s(s +10)
试分别求出K=10s–1和K=20s–1时,系统的阻尼比ζ 和
自动控制理论第一章引论86页PPT
控 制
A级,厌学型:不快乐、厌烦、心理上的强烈反感和抵触;
理 论
B级,被动型:消极、被动、麻木,在父母、老师的督促和
舆论的压力下取得进步;
C级,机械型:全身心投入、刻苦用功、头悬梁锥刺骨、按 部就班地朝着一流的方向努力;
D级,进取型:自信、主动、积极,把必须要做的事情做到 最好,持续性地保持一流的成绩;
俄国A.M.Lyapunov(李雅普诺夫,1892年)在《论运动稳 定性的一般问题》中建立了动力学系统的一般稳定性理论。 提出了李雅普诺夫第一法与第二法
H.Nyquist(乃魁斯特,1932年)提出乃氏判据,Bode(波特, 1927年)提出了对数频率特性的方法。
W.R.Evans(伊万斯,1948年)提出根轨迹法,此方法和规 则指的是当系统参数变化时特征方程式根变化的几何轨迹。 目前仍然是系统设计和稳定性分析的一种重要方法。
发表《论调节器》,研究调节器的微分方程,
线性化处理,系统稳定性取决于微分方程的
特征根是否都具有一对负的实部,针对二阶
和三阶系统讨论了使特征根具有负实部时,
特征多项式系数应满足的条件。
20
第一章 引 论
自
动(3) 系统稳定判据
控
制 理 由E.J.Routh(劳斯,1884年) 和 Hurwitz(霍尔维茨, 论 1895年)提出的劳斯-霍尔维茨稳定判据
29
第一章 引 论
自
动 控
第三节 自动控制和自动控制系统
制
理
论
一、自动控制的概念
1、手动控制 水箱水位的手动控制:
图1-1 水箱水位的人工 控制系统示意图
30
第一章 引 论
自
动 控
自动控制理论邹伯敏第3版课后答案总.doc
《自动控制理论 第2版》习题参考答案第二章2-1 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-2 (a)()()RCs RCs s U s U 112+= (b) ()()141112+⋅-=Cs R R R s U s U (c) ()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U 2-3 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602 2-4()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=260232-5 ()2.0084.01019.23-=⨯--d d u i2-8 (a)()()()()3113211G H G G G G s R s C +++= (b) ()()()()()31243212143211H G H G G G H G G G G G G s R s C +++++=2-9 框图化简中间结果如图A-2-1所示。
图A-2-1 题2-9框图化简中间结果()()()()52.042.018.17.09.042.07.023++++++=s k s k s s s R s C 2-10()()4232121123211G H G G H G G H G G G G s R s C ++-+=2-11 系统信号流程图如图A-2-2所示。
图A-2-2 题2-11系统信号流程图()()()()2154214212654212215421421321111H H G G G G G G G H G G G G G s R s C H H G G G G G G G G G G s R s C -++=-++=2-12 (a)()()()adgi abcdi agdef abcdef cdhs R s C +++-=11(b) ()()()1221211222112++++=s C R C R C R s C R C R R s R s C2-13 由选加原理,可得()()()()()()[]s D H G G s D G s D G s R G G G H G H s C 3121221221221111--+++=第三章3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时设系统为单位反馈系统,有()()()()()2222nn n r s s s s R s c s R s E ωζωζω+++=-= 系统对单位斜坡输入的稳态误差为 ()nn n n s sr s s s s s s im e ωζωζωζω22212220=+++⋅⋅=→ 3-2 (1) 0,0,50===a v p K K K (2) 0,,==∞=a v p K K K K(3) 10,,K K K K a v p =∞=∞= (4) 0,200,==∞=a v p K KK K 3-3 首先求系统的给定误差传递函数()101.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()()()0)101.0()12.0(20)101.0(2lim lim 1.0)101.0()12.0(10lim lim 0101.0)11.0(lim lim 322202202220012000=+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s e s s e s(1) 0)(R t r =,此时有0)()(,)(0===t r t r R t r s s s ,于是稳态误差级数为()0)(0==t r C t e s sr ,0≥t(2) t R R t r 10)(+=,此时有0)(,)(,)(110==+=t r R t r t R R t r s s s ,于是稳态误差级数为()1101.0)()(R t rC t r C t e s s sr =+= ,0≥t (3) 221021)(t R t R R t r ++=,此时有t R R t rt R t R R t r s s 212210)(,21)(+=++= ,2)(R t r s = ,于是稳态误差级数为 ())(1.0)(!2)()(21210t R R t r C t rC t r C t e s s s sr +=++= ,0≥t 3-4 首先求系统的给定误差传递函数()5001.0)11.0()(11)()(2+++=+==Φs s s s s G s R s E s e 误差系数可求得如下()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω()()()232220220222001200050098)5001.0()12.0(1000)5001.0(100lim lim 5001)5001.0()12.0(500lim lim 05001.0)11.0(lim lim =+++-++=Φ==+++=Φ==+++=Φ=→→→→→→s s s s s s ds d C s s s s ds d C s s s s s C s e s s es s e stt r t t rt t r s s s 5sin 25)(5cos 5)(5sin )(-===稳态误差级数为()[][][]tt tC t C C t e sr 5cos 1015sin 109.45cos 55sin 25224120 -⨯++⨯=-⨯+⎥⎦⎤⎢⎣⎡+⨯-=- 3-5 按技术条件(1)~(4)确定的二阶系统极点在s 平面上的区域如图A-3-1 (a) ~ (d)的阴影区域。
自动控制理论_(刘丁_著)_机械工业出版社_课后答案
习题31. 答案:t K >=0.32. 此温度计的时间常数T= t/4=15秒3. 答案: ()10.11s s φ=+4. 答案:b 变大系统阶跃响应的延迟时间、上升时间和调节时间都加长。
5.)1)(2(22++-=s s s X Y 6. 略7. 答案: (1)2600()70600G s s s =++,(2)24.5n w =,ζ=1.438. 答案: 1.24p t =,%9.5%σ= 1.58(5%)s t =∆=或 2.11(2%)s t =∆=9. 1)开环零点-2.5 开环极点-0.52)闭环零点-2.5 闭环极点-0.4500 ± 0.8930i 3)1=n ω ζ=0.45 4)38.1=r t 96.7=s t %6.22%=ο10. 答案:H K =0.9,0K =10 11. 答案:47,0.1K τ≈≈ 12. 答案:3 13. 答案:(1)不稳定,右半S 平面有2个根; (2)不稳定,右半S 平面有2个根; (3)不稳定,右半S 平面有1个根;14. 略15. 答案:系统的参数(),K ξ的稳定域为0020K ξξ><<,。
16. 答案:51499K << 17. 答案:(1)由()D s 表达式可见,当0β=时系统结构不稳定;当0β>时系统总是稳定的。
(2)由ξ=可见2%3.57s n t K ξσβξωβ⎧↑→↓⎪↑⇒⎨==↓⎪⎩(3) 1ss ss a a e e K K ββ==∴↑→↑。
18. 答案:a T 、M T 与K 均大于0且10zK T <<时闭环系统是稳定的。
19. 答案:121ssn K e K =-+20. 证明:是I 型系统;21.B K K v =KBe ss = 与K 成反比,与B 成正比 22.G=tf(80,[1 2 0]); GB=feedback(G,1); t=0:0.01:1; [y,t]=step(GB); e=1-y;m=length(t);subplot(2,1,1),plot(t,y,'k',t,ones(m,1),'k-.') %draw unit step response curve title('unit step response','FontSize',8)xlabel('Time(sec.)','Position',[5.5 -0.21],'FontSize',8) ylabel('Amplitude','FontSize',8) axis([0 6 0 2])subplot(2,1,2), plot(t,e,'k',t,zeros(m,1),'k-.') %draw error response curve title('error response','FontSize',8)xlabel('Time(sec.)','Position',[5.5 -1.21],'FontSize',8) ylabel('Amplitude','FontSize',8)012unit step responseTime(sec.)A m p l i t u d e-11error responseTime(sec.)A m p l i t u d e()()1()k B k G s s G s φ=+()()1()B k B s G s s φφ=-2()()Ks bG s s a k s+=+-0lim ()V s bK sG s a K →==-1ss v a k e K b-==23 clearnum=1;den=conv([0.5 1 0],[4 1]); rangek=[0.2,0.8,1.2]; t=linspace(1,60,300)'; for j=1:3s1=tf(num*rangek(j),den); sys=feedback(s1,1); y(:,j)=step(sys,t); endplot(t,y(:,1),'k',t,y(:,2),'r',t,y(:,3),'b')title('unit step response under different k','FontSize',8) xlabel('Time(sec.)','Position',[50 -1.8],'FontSize',8) ylabel('Amplitude','FontSize',8) axis([0 60 -1.5 3.5])gtext('k=0.2'),gtext('k=0.8'),gtext('k=1.2')Time(sec.)A m p l i t u d e求当k =0.8时系统的性能指标 clear num=1;den=conv([0.5 1 0],[4 1]); k=0.8;num=num*k; s1=tf(num,den); sys=feedback(s1,1); t=0:0.005:50; y=step(sys,t); r=1;while y(r)<1.0001 r=r+1; endrise_time=(r-1)*0.005 [ymax,tp]=max(y);peak_time=(tp-1)*0.005 max_overshoot=ymax-1 s=length(t);while y(s)>0.98 & y(s)<1.02s=s-1;endsettling_time=(s+1)*0.005运行结果:rise_time =4.5350peak_time =7.7950max_overshoot =0.5710settling_time =46.855024 num=[6.3223 18 12.811]den=[1 6 11.3223 18 12.811]step(num,den)25 num=1for kesi=0:0.2:1sys=tf(num,[1 2*kesi 1]);step(sys)hold onend习题41.(a) (b) (c)(d) (e) (f) 2.(1)(2)证明:s j σω=+代入1+G(s)H(s)=0*()()0s s b k s a +++=*()(())(())0jw jw b k jw a σσσ++++++=*2()()0k a b σσσω+++-=*20k b a ++=消去*k 得:222()a a ab σω++=-所以根轨迹是以(-a,0) 3.答案:(1)(2)(3)(4)4.答案:(1)分离点: 3.854d =-渐近线 25,a a πσϕ=-=±,* 1.37K =,闭环系统稳定的*K 值的范围是*04K <<。