船舶横摇运动中力矩分析
船舶的摇摆控制

船舶的摇摆控制大型集装箱船首部与尾部的形状差别很大,所以当船舶在波浪区域航行,沿船长方向出现波峰和波谷时,很容易导致船舶扶正力臂的变化,故要特别关注船舶的摇摆参数-周期和幅度,一艘船的扶正力矩是扶正力臂与总重量的乘积。
船舶在顺水或逆水前进时,其横摇和纵倾是呈周期性的变化,其扶正力臂也呈周期性的变化。
正是因为这种现象,导致船舶的扶正力矩也随之发生变化,从而引发了船舶的摇摆。
而这种以时间为变量参数的摇摆,如果遇上合适的海浪情况,就有可能引发船舶共振现象,这时船舶的摇摆角度加大,导致货物和集装箱的灭失,极端的情况下,可能使船体结构遭受破坏。
最近几年来,集装箱船的事故,就反映出这种现象的危险性。
人们都知道一个现象,船舶在低速航行时,如果恰巧在某一时间操舵、遇到阵风或其它因素的影响时而引起船舶附近的波浪发生变化,当其频率较低时(仅为船舶自身摇摆周期的一半),有可能导致船舶摇摆的角度很大。
对大型集装箱船,在一定的海况下就有可能产生周期性的摇摆,如在北太平洋和北大西洋一年中分别有9%和12%时间里存在着导致这种现象发生的海况。
实事上,如果在船舶上安装一个减摇系统,适时地给船舶外加一个恰当的阻尼,来抵消船舶扶正力矩的变化,摇摆是可以加以预防的。
德国的Interring公司生产的IPRF装置就是这种想法在实船上的应用。
这套装置采用众所周知的自控式减摇水舱技术,其核心部分是减摇水舱系统。
两个水舱分别布置于船舶的左右舷,在船体上设置一个通道,将两个水舱相互连通,形成U 型水舱。
减摇水舱中充入一定量的水,注水量应根据水舱形状、船舶装载情况和航线情况来确定。
其原理是使水舱内的水的运动周期和船舶在波浪上的摇摆周期相近,保证在船舶摇摆时,两个液舱能形成一定的水位差,以便形成一个扶正力矩,以扶正力矩抵消波浪所产生的倾斜力矩,达到减小船舶的摇摆幅度。
一套典型的船舶IPRP系统应由几对液舱、一个气动的空气阀和一套控制单元组成,控制单元中包括船舶纵倾和横摇传感器。
船舶摇摆实验解析
具体实验内容:格式样板如下,字体均用宋体。
(填空,每空1分,共25分)船舶摇摆实验1、实验目的(10)(1)测量实船的固有横摇周期。
(2)通过实验了解船舶重心对横摇周期的影响。
2、实验原理(15)船舶的摇荡主要有下列六种形式:横摇、纵摇、首摇、垂荡、横荡、纵荡。
其中,横摇、纵摇和垂荡对船的航行影响最大,而横摇又最容易发生,横摇振幅也最大,严重影响船舶安全。
船舶的稳性:横摇固有周期Ts:横摇摇幅衰减静水中通过对船舶施加倾斜力矩,使船舶产生初始倾角θ后,去除该力距,船舶进入自由横摇状态。
静水中船舶自由横摇的衰减曲线是按指数规律随时间而衰减的,相邻的两个横摇峰值或谷值之间的时间间隔即为横摇的固有周期Ts。
在半个周期时间间隔内,横摇幅值绝对值的变化为由以上关系可得无因次衰减系数的表达式为:3、实验步骤(10)1、确认所有实验设备处于正确的初始状态,包括:船舶(模)的摇摆运动不会受到干扰,倾角测量装置已上电并运行正常;2、每次实验前测量其初始倾角;3、运行倾角测量软件;4、给船舶施加倾斜力矩使其倾斜;5、点击倾角测量软件界面上的“开始”按钮,此时开始测量倾角数据并显示在界面上;6、去除倾斜力矩使船舶进入自由横摇状态;7、等待一定时间后,点击倾角测量软件界面上的“暂停”按钮,停止测量倾角数据;8、将记录下来的倾角数据保存在指定的文件中;9、在船舶的某一高度上增加重量。
首先将双面胶的一面贴在亚铁上,然后将亚铁粘贴到船模上。
注意沿船长的方向,亚铁的中心线要与船模的中线一致,避免船舶左右不对称产生固定的横倾角。
将增加重量的船模放入水中,给船模施加倾斜力矩使其倾斜,去除该力矩使船舶进入自由横摇状态,对船模摇摆的倾角进行测量并保存实验数据。
按照这个方法,逐渐增加亚铁的数量,并对其进行摇摆试验,测量其摇摆横倾角并保存数据;10、点击倾角测量软件界面上的“退出”按钮,关闭该软件,结束实验。
4、实验数据及其处理(40)根据测得的倾角数据绘制倾角随时间的变化曲线、船舶横摇消灭曲线,求实验船舶的横摇周期、无因次阻尼系数,并写出算例。
船舶非线性参激横摇运动的分析

总第175期水运科技信息1999年第4期收稿日期:1999205215船舶非线性参激横摇运动的分析张 兢(武汉交通科技大学航运学院 武汉 430062)摘 要 应用非线性振动理论中的摄动法,求出了描述参激横摇运动的非线性方程的解,并分析解的稳定性。
结果表明,参激横摇运动具有明显的非线性特征。
关键词 参激横摇运动 摄动法 非线性振动理论1 引言由于纵摇或垂荡对横摇的耦合作用,或由于波浪的周期性干扰,会引起横摇回复力矩的周期性变化。
这种系统内部参数的变化对系统运动的影响,称为参数激励。
由参数激励所引起的横摇运动,称为参激横摇。
在一定的条件下,参激横摇会变得不稳定,导致增幅横摇运动。
这种现象就是横摇参数共振,参激横摇运动及参数共振现象,是当前国际上关于船舶稳性和耐波性研究的热门课题之一。
描述参激横摇运动的主要数学模型是M ath ieu 方程。
但是M ath ieu 方程描述的是一个单自由度的时变线性系统。
而参激横摇是一个大摇幅的非线性问题,用线性模型来研究大角度的非线性横摇问题,显然不尽合理。
因此,本文采用非线性参激横摇运动方程作为研究的基础,用非线性振动理论中的摄动法,分析参激横摇运动的基本特性,探索它的运动规律。
2 运动方程根据船舶的受力分析,可写出下列形式的横摇运动方程:Ηβ+D (Ηα,t )+R (Η,t )=E (t )+W (t )(1)式中:t ——时间;Η——;Ηα=d Η d t ——横摇角速度;Ηβ=d 2Η d t 2——横摇角加速度。
D (Ηα)代表横摇阻尼力矩,它是横摇角速度的函数,阻尼力矩的常用模式有三种:线性模式、线性加平方模式和线性加立方模式。
本文采用第三种模式,即D (Η)=n 1Ηα+n 3Ηα3(2)式中:n 1和n 3分别为线性阻尼系数和非线性阻尼系数,通过船舶横摇衰减试验来确定。
R (Η,t )代表横摇回复力矩,它是横摇角和时间的函数。
R (Η,t )由两部分组成:第一部分是船舶在静水中的回复力矩,与时间无关。
多自由度耦合的船舶参数横摇运动分析和数值计算

多自由度耦合的船舶参数横摇运动分析和数值计算船舶的横摇运动是指船舶在水平方向上由于外界环境力的作用而发生的左右摆动运动。
对于多自由度耦合的船舶系统而言,横摇运动的分析和数值计算是一个非常复杂的问题。
这种系统的船体在不同自由度上的运动相互耦合,因此需要考虑多种因素的影响,如船体结构、载荷分布、水动力与结构动力的耦合效应等。
在进行多自由度耦合的船舶参数横摇运动分析和数值计算时,一般采用数学模型来描述船体在横摇过程中的运动。
这个数学模型通常包括船舶的结构特性、水动力和结构动力之间的相互作用等因素。
通过建立这个数学模型,可以利用物理原理和数学方法来研究船舶横摇运动的特性,比如横摇的周期、振幅、频率等。
在进行横摇运动分析时,需要考虑到船舶的多自由度耦合效应。
这种耦合效应包括船体在横滚、纵摆和横向平移等不同自由度上的运动之间的相互作用。
这些自由度之间的相互作用会对船舶的横摇运动产生影响,使得其运动变得更加复杂和难以预测。
为了进行多自由度耦合的船舶参数横摇运动的数值计算,一般采用数值求解方法。
这些方法包括有限元法、边界元法、流体-结构相互作用方法等。
通过这些数值方法,可以对船舶在横摇过程中的动态响应进行精确的计算和分析,得出船舶在不同情况下的横摇运动特性。
在进行多自由度耦合的船舶参数横摇运动分析和数值计算时,需要考虑到各种复杂因素的影响,如船舶结构的非线性特性、海洋环境的不确定性、船舶载荷的变化等。
为了能够准确地评估船舶在横摇运动中的性能和安全性,必须进行详细的分析和计算,以及充分考虑到多自由度耦合效应的影响。
综上所述,多自由度耦合的船舶参数横摇运动分析和数值计算是一个复杂而重要的问题。
只有通过对船舶系统进行深入分析和精确计算,才能更好地理解船舶在横摇过程中的运动特性,从而为船舶设计和运行提供更好的指导和保障。
破损船舶瘫船时的横摇运动分析

破 损 船 舶 瘫 船 时 的横 摇 运 动 分 析
胡丽芬 ,鲁 江 , 张全 忠 , 田忠 民
( 1 . 鲁 东大学交通 学院,烟 台 2 5 0 0 6 4 ;2 中国船舶科 学研 究中心,无锡 2 1 4 0 8 2)
摘
要
为 了研 究破损船舶瘫船 时的横 摇运动 , 采用 Da v e n p o r t 风 谱计算定 常风和 阵风 的风倾力矩 , 采用 I T T C双 参数 波谱 计算不规则波波浪力矩 ,采用增加 重量法计算破损进水 ,建 立 了破损船舶 瘫船时的横摇运动方程。 最后 以一艘船舶 为例 ,计算 了船舶 非对称破损 、对称破损 以及 完整状 态下的横 摇运 动幅值 ,分析 了破损船舶
风浪 并存 时单 自由度横 摇运 动 方程 如下 :
+
(
㈩
为 横摇惯 性 矩 ,
式中, 为横 摇 角 , 为 线性 阻尼 系数 , 为非线 性 阻尼 系数 , 为 船舶 重量 ,
为 随 时间变 化 的横摇 附加惯 性 矩 ,G z 为对 应 不 同横 倾 角 时的 复原 力臂 , 为基 于 F r o u d . Kr y l o v假 设 的波 浪激励 力 矩 。 1 . 2 . 1 风倾 力矩 计 算 风 倾 力矩 的计 算可 用下 式表 示 :
nd
. n d ( 0 为风 倾 力矩 ,
。 (
( f ) = o . s x p . C m V C
+ C m
( f )
( 2 )
式 中 ,P a i r 是空气 密 度 ,c 为空气 阻力 系数 ,
中
国
造
船
学 术论 文
空间点、海浪和船体运动关系,即空间固定坐标系o  ̄ r t (、运动坐标系G 和随船平移的参考坐标
船舶横摇运动中力矩研究分析
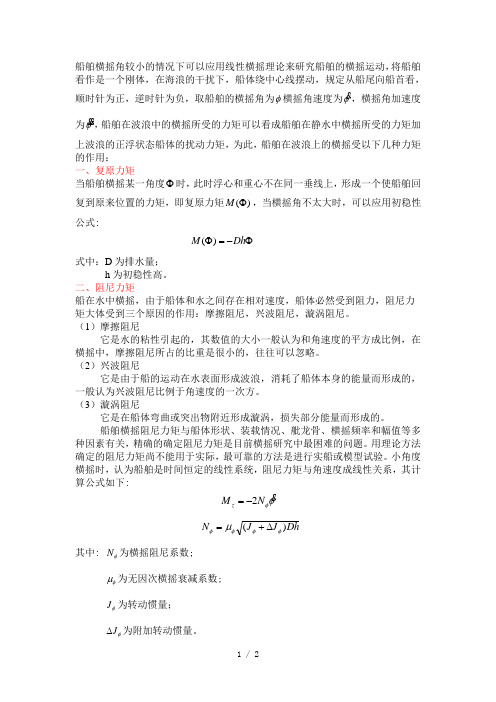
船舶横摇角较小的情况下可以应用线性横摇理论来研究船舶的横摇运动,将船舶看作是一个刚体,在海浪的干扰下,船体绕中心线摆动,规定从船尾向船首看,顺时针为正,逆时针为负,取船舶的横摇角为φ横摇角速度为φ,横摇角加速度为φ ,船舶在波浪中的横摇所受的力矩可以看成船舶在静水中横摇所受的力矩加上波浪的正浮状态船体的扰动力矩,为此,船舶在波浪上的横摇受以下几种力矩的作用:一、复原力矩当船舶横摇某一角度Φ时,此时浮心和重心不在同一垂线上,形成一个使船舶回复到原来位置的力矩,即复原力矩)(ΦM ,当横摇角不太大时,可以应用初稳性公式:Φ-=ΦDh M )( 式中:D 为排水量;h 为初稳性高。
二、阻尼力矩船在水中横摇,由于船体和水之间存在相对速度,船体必然受到阻力,阻尼力 矩大体受到三个原因的作用:摩擦阻尼,兴波阻尼,漩涡阻尼。
(1)摩擦阻尼它是水的粘性引起的,其数值的大小一般认为和角速度的平方成比例,在横摇中,摩擦阻尼所占的比重是很小的,往往可以忽略。
(2)兴波阻尼它是由于船的运动在水表面形成波浪,消耗了船体本身的能量而形成的,一般认为兴波阻尼比例于角速度的一次方。
(3)漩涡阻尼它是在船体弯曲或突出物附近形成漩涡,损失部分能量而形成的。
船舶横摇阻尼力矩与船体形状、装载情况、舭龙骨、横摇频率和幅值等多种因素有关,精确的确定阻尼力矩是目前横摇研究中最困难的问题。
用理论方法确定的阻尼力矩尚不能用于实际,最可靠的方法是进行实船或模型试验。
小角度横摇时,认为船舶是时间恒定的线性系统,阻尼力矩与角速度成线性关系,其计算公式如下:φφ N M z 2-= Dh J J N )(φφφφμ∆+= 其中: φN 为横摇阻尼系数;φμ为无因次横摇衰减系数;φJ 为转动惯量;φJ ∆为附加转动惯量。
三、惯性力矩船舶在横摇运动中存在角加速度,则必然会产生惯性力矩,惯性力矩两部分组成,即船舶自身的惯性力矩和附加惯性力矩,它与横摇角加速度的关系可写成:φφφφ )()(J J M ∆+-= 式中:φJ 为转动惯量;φJ ∆为附加转动惯量。
船舶在横浪中的横摇运动及其稳定性研究
船舶在横浪中的横摇运动及其稳定性研究船舶在海洋中航行时,常常会遭遇横浪的困扰。
这些横浪会对船舶产生一定的力量作用,使船体在横向上发生横摇运动。
横摇是船舶在横向运动中最为显著的一种运动形式。
本文将介绍船舶在横浪中的横摇运动及其稳定性研究。
横摇的产生和影响:在横浪中,船舶受到不同方向和振幅的力量作用,这些力量产生的翻滚矩和抵抗矩不平衡,导致船舶在横向上的横摇运动。
横摇运动会影响船舶的安全性能和航行舒适性,它会加大船舶的滚动角度,增加船舶在横向上的来回摇晃幅度,使船员和货物易于受到损坏。
因此,探究船舶横摇的稳定性问题具有重要意义。
稳定性分析:船舶的稳定性问题可以从数学和物理两个角度考虑。
从物理学的角度,船舶的稳定性与其所受到的力矩有关。
在横向运动中,船舶所受到的力矩主要有以下几种:Wind moment(风力矩)、Wave moment(浪力矩)、Inertial moment(惯性力矩)和Damping moment(阻尼力矩)。
在横摇稳定性分析中,应关注的是横摇固有周期和横摇角度。
当固有周期接近或等于横浪周期时,船舶的横摇角度会大幅度增加,造成不稳定状态。
从数学角度,稳定性问题可以通过船舶横摇运动方程进行分析。
船舶横摇方程是一个非线性、时变的差分方程,它描述了船舶在横向运动中受到的各种力量作用和响应。
由于船舶横摇方程的复杂性,其解析解通常难以得到,因此需要对其进行数值模拟。
通过数值模拟可以得到船舶横摇的幅度、周期、轨迹等信息,从而对其稳定性进行分析。
稳定性措施:为解决船舶在横浪中的横摇问题,人们采取了多种措施。
船体结构设计方面,增加船舶宽度、降低重心位置以及增加顶重物的阻力等,可以提高船舶的稳定性。
舵角控制方面,合理调节舵角,控制船舶的姿态变化,可以平衡船体的横向力量。
此外,将一些钢筋水泥等高密度材料放置在船舶的低处,也可以降低船舶的重心从而提高稳定性。
总之,船舶在横浪中的横摇运动及其稳定性研究对于海洋工程领域具有重要意义。
基于CFD分析的船舶横摇运动统计特征

基于CFD分析的船舶横摇运动统计特征船舶横摇运动是一种常见的船舶运动形式,对于船舶的安全运营和舒适度具有重要影响。
为了更好地理解船舶横摇运动特性,船舶工程领域逐渐引入了计算流体力学(CFD)技术进行数值模拟和分析。
本篇文章旨在介绍船舶横摇运动的统计特征及其CFD分析方法。
一、船舶横摇运动的统计特征1. 横摇周期:定义为船舶进行一次完整的横摇周期所需要的时间,通常为几秒至几十秒不等,与船舶主体结构和液体动力学特性有关。
2. 横摇振幅:指船舶在横摇运动中最大横向倾角的大小,通常用角度或者弧度来表示。
3. 横摇频率:指单位时间内,船舶进行的完整横摇周期数,通常以Hz表示。
4. 横摇稳定性:指船舶进行横摇运动时的稳定性程度,通常使用杆长比等指标来衡量。
二、CFD分析船舶横摇运动的方法CFD技术适用于船舶横摇运动的数值模拟和分析,其中有两种主要方法:1. RANSE模拟:利用雷诺平均Navier-Stokes方程(RANSE)求解船舶流体的速度、压力、 turbulence等流场参数,结合Wolfson波浪理论和Froude-Krylov力来描述流体的动力特性。
2. 光学计量测量法:该方法通过测量船舶表面光的变化,来得出船体在横摇运动中的角度和速度,即可进一步分析船舶的横摇特征。
三、CFD分析结果及其实验验证通过CFD技术进行船舶横摇运动的数值模拟,可以得到船舶运动的统计特性和各种流场参数。
例如,通过分析不同水深和船速条件下船舶横摇的稳定性,可以确定船舶横摇周期、横摇振幅和横摇频率等统计特征。
此外,CFD技术还可以进一步分析船舶横摇时的水动力响应和力矩分布等,从而为船舶的设计、运营和安全问题提供科学依据。
CFD技术的应用可以有效地提高船舶的设计和安全性能,提高运营效率和舒适度。
在CFD分析结果的实验验证方面,采用CCOM/JHC自由船舶水池进行大型模型实验,需重现CFD数值模拟中的各种边界条件和流场参数,如水深、速度、波浪等,以确保数值分析和实验结果的一致性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船舶横摇角较小的情况下可以应用线性横摇理论来研究船舶的横摇运动,将船舶看作是一个刚体,在海浪的干扰下,船体绕中心线摆动,规定从船尾向船首看,
顺时针为正,逆时针为负,取船舶的横摇角为φ横摇角速度为φ&,横摇角加速度
为φ&&,船舶在波浪中的横摇所受的力矩可以看成船舶在静水中横摇所受的力矩加上波浪的正浮状态船体的扰动力矩,为此,船舶在波浪上的横摇受以下几种力矩的作用:
一、复原力矩
当船舶横摇某一角度Φ时,此时浮心和重心不在同一垂线上,形成一个使船舶回复到原来位置的力矩,即复原力矩)(ΦM ,当横摇角不太大时,可以应用初稳性公式:
Φ-=ΦDh M )(
式中:D 为排水量;
h 为初稳性高。
二、阻尼力矩
船在水中横摇,由于船体和水之间存在相对速度,船体必然受到阻力,阻尼力 矩大体受到三个原因的作用:摩擦阻尼,兴波阻尼,漩涡阻尼。
(1)摩擦阻尼
它是水的粘性引起的,其数值的大小一般认为和角速度的平方成比例,在横摇中,摩擦阻尼所占的比重是很小的,往往可以忽略。
(2)兴波阻尼
它是由于船的运动在水表面形成波浪,消耗了船体本身的能量而形成的,一般认为兴波阻尼比例于角速度的一次方。
(3)漩涡阻尼
它是在船体弯曲或突出物附近形成漩涡,损失部分能量而形成的。
船舶横摇阻尼力矩与船体形状、装载情况、舭龙骨、横摇频率和幅值等多种因素有关,精确的确定阻尼力矩是目前横摇研究中最困难的问题。
用理论方法确定的阻尼力矩尚不能用于实际,最可靠的方法是进行实船或模型试验。
小角度横摇时,认为船舶是时间恒定的线性系统,阻尼力矩与角速度成线性关系,其计算公式如下:
φ
φ&N M z 2-= Dh J J N )(φφφφμ∆+=
其中: φN 为横摇阻尼系数;
φμ为无因次横摇衰减系数;
φJ 为转动惯量;
φJ ∆为附加转动惯量。
三、惯性力矩
船舶在横摇运动中存在角加速度,则必然会产生惯性力矩,惯性力矩两部分组成,即船舶自身的惯性力矩和附加惯性力矩,它与横摇角加速度的关系可写成:
φ
φφφ&&&&)()(J J M ∆+-=式中:φJ 为转动惯量; φJ ∆为附加转动惯量。
四、海浪扰动力矩
波浪改变了船体水下的体积的形状,从而产生复原扰动力矩,船体的存在阻止了波浪的运动,反之波浪也给船体一个作用力矩。
海浪扰动力矩是引起船舶横摇运动的主要原因,它由三部分组成:
(1)由于波浪改变船体水下部分体积的形状而产生的复原力矩公式为:
e BH Dh M α=
(2)海浪对船舶航行时的阻尼扰动力矩可表示为:
e BZ N M αφ&2=
(3)船体的附加惯性扰动方矩可表示为:
e BG J M αφ&&∆=
故波浪扰动力矩可表示为:
=),,(e e e M ααα&&&e Dh α+e N αφ&2+e J αφ&&∆
五、扶正力矩
由于减摇装置的存在,当波浪作用到船上时,减摇装置给船一个扶正力矩,以使船舶的横摇角减小,用于抵消波浪对船舶的作用力。
公式如下:
f Dh M α-=Φ)(。