六轴无人机结构
六轴关节机器人机械结构
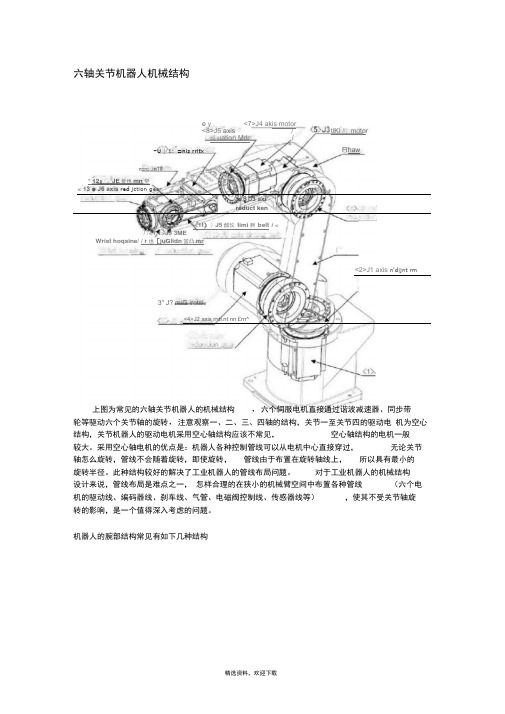
六轴关节机器人机械结构e y . <7>J4 akis motor<8>J5 axis / tiKi呂motor说uation Mdr /Flhaw-U 」£: □nis rritxr crc .inTi* 12;、JE处也mn空< 13 ■ J6 axis red jction gear■ S J3 axireduct ken/ \<1t)〉J5 酣仪timi啊belt i </ /<1 1>J5 3MEWrist hoqsine/ / r也[juGlidn 営凸mr<2>J1 axis n'dijnt rm3" J? miG irctci:<4>J2 axis rrdi.nt nn £rn^上图为常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。
采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。
此种结构较好的解决了工业机器人的管线布局问题。
对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。
机器人的腕部结构常见有如下几种结构•3RS在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等关节设计:对于国外的工业机器人主要制造国家来说,六轴关节机器人的研发设计及制造已经有好几十年的历史了,整个工业机器人的研发制造体系较为完善,他们的技术相对来说比较成熟,他们在相互竞争中可以相互模仿、改善、不断推陈出新,他们的技术对于国内来说,近乎完美•而国内目前这个行业还处在黎明前的黑暗阶段,虽然有不少公司有这个研发意图,或者正在研发途中,不管怎么说,浮出水面公布自己正在研发或者研发成功的公司应该说是极少数,即使宣布自己研发成功,也只是初步试验成功,真正产业化、商品化还有一段相当漫长的路要走•而更多的公司还停留在项目立项、技术评估、投入风险分析的阶段•由于国内做这个行业的很少,相关的结构也没有什么可参考的,技术储备不足,少数的单位或个人有机会能够拆拆别人的机器,拆个一知半解,更多的人只能在旁边看看了(比如说我,想拆都没机会A_A),还好了,网络资源丰富,今搜集到不少机械结构方面的图片,分享给大家参考,希望咱们做机械设计的(我应该也算是个机械工程师啊A_A毕竟我也是做机械的)少走点弯路,做出更好的机器•六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动•小型的六轴关节机器人的腕部关节主要采用谐波减速器•下面的图片较为详细的描述了常见的六轴关节机器人的腕部结构•上图所示的腕部关节用到了两个谐波减速器,两个同步齿型带传动输入,中间还用到了一对锥齿轮副传动Welcome !!! 欢迎您的下载, 资料仅供参考!。
6关节机器人介绍剖析

6关节机器人介绍剖析六关节机器人,也称为六轴机器人,是一种具有六个自由度的机器人系统。
每个关节都能够进行旋转,这使得机器人能够在三维空间中执行各种复杂的任务和动作。
下面我将对六关节机器人的结构、工作原理、应用领域以及优势进行介绍和剖析。
六关节机器人的结构主要由六个旋转关节组成,每个关节由电机驱动,通过齿轮传动或者其他传动方式将旋转运动传递到机械臂的末端。
这种结构使得机器人能够沿着不同的轴进行灵活的运动,实现各种复杂的动作。
同时,机器人的末端还可以配备各种工具或器械,从而可以在不同的领域中执行不同的任务。
六关节机器人的工作原理主要是通过控制每个关节的旋转角度,从而实现机械臂的整体运动。
通常采用的控制方式有PID控制、模糊控制、神经网络控制等。
通过计算机的精确控制,可以使机器人按照预先设定的路径或者姿态完成任务。
六关节机器人在各个领域都有广泛的应用。
在制造业中,它们可以完成各种组装、装卸、搬运、焊接等工作。
在医疗领域,它们可以辅助进行手术操作、康复训练等。
在军事领域,它们可以用于侦查、拆弹、装甲车维修等任务。
此外,它们还可以应用于航空航天、矿山、化工、食品加工等行业,为人们提供更安全、高效、精确的服务。
六关节机器人相比其他机器人系统具有一些独特的优势。
首先,六关节机器人具有较大的工作范围和灵活性,能够执行复杂的动作和路径规划。
其次,这种机器人的运动轨迹较为精准,可以实现高精度的定位和操作。
此外,六关节机器人在力矩和负载方面也具有较大的承载能力,可以应对不同的工作环境和工作负荷。
然而,六关节机器人也存在一些挑战和不足之处。
首先,它们通常需要较大的空间,并且布置和配置相对较为复杂。
其次,其运动控制需要较高的控制精度和计算能力,对控制系统提出了较高的要求。
此外,由于六关节机器人的结构较为复杂,对维护和保养也提出了较高的要求。
综上所述,六关节机器人是一种具有六个自由度的机器人系统,由六个旋转关节组成。
它们在制造业、医疗、军事等领域具有广泛的应用。
AC1100六轴无人机——技术参数
六轴无人机
AC1100参数
1.1六轴无人机的介绍
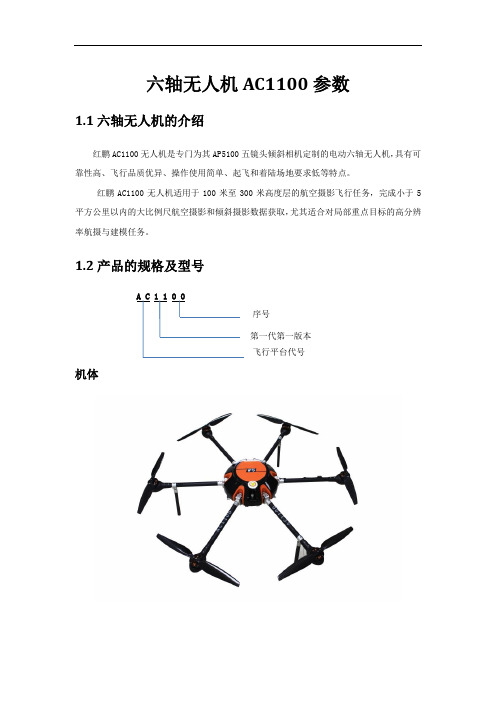
红鹏AC1100无人机是专门为其AP5100五镜头倾斜相机定制的电动六轴无人机,具有可靠性高、飞行品质优异、操作使用简单、起飞和着陆场地要求低等特点。
红鹏AC1100无人机适用于100米至300米高度层的航空摄影飞行任务,完成小于5平方公里以内的大比例尺航空摄影和倾斜摄影数据获取,尤其适合对局部重点目标的高分辨率航摄与建模任务。
1.2产品的规格及型号
A C 1 1 0 0
机体
飞行平台代号第一代第一版本序号
1.3产品技术指标
1)无人机物理指标
展开尺寸:1200毫米×1200毫米×500毫米
空机重量:小于5.5公斤(不含标配动力电池)
2)无人机性能指标
飞行升限:1000米
控制半径:1000米
作业高度:100米~300米
续航时间:载重2.3公斤续航时间约30分钟
最大升降速度:6米/秒
最大巡航速度:10米/秒
悬停精度:垂直方向±1米,水平方向±2米。
飞行方式:自主飞行&手控飞行
起降场地:小于40平方米
使用温度:-10℃~+40℃
环境湿度:95%
作业效率:不小于0.5平方公里/架次(0.1米分辨率)
模块化设计:具备完全互换性
3)无人机安全指标
抗风等级:地面5级
动力电池欠电压保护:当电池电压低时,手持地面站和遥控器给出预警信息。
4)地面站技术指标
专业级平板电脑
地面站预装授权Windows系统。
便携式无线数传电台,通信距离约1000米。
预装自动航摄规划软件。
1.4 包装清单。
浅谈传统六轴机器人的基本构成及特点

浅谈传统六轴机器人的基本构成及特点传统关节机器人基本构成传统关节机器人主要由本体结构件、减速器、伺服电机、控制器等构成。
本体结构件工业机器人本体由旋转机座,大臂,小臂等部位组成,是机器人外面最直接的机械结构。
机器人本体结构件包含铸铁、铸钢、铸铝、结构钢等多种材质。
减速器减速器用于承载机器人各个关节的载荷,电机输出的高转速低扭矩通过减速器后形成低转速高转矩,从而提升机器人各轴的输出力矩,使得机器人可以承受较大的负载。
机器人对减速器的要求很高,需要减速器体积小、质量小、减速比大、精度高、抗冲击等。
目前大量应用于多关节机器人的减速器主要有两种:一种是RV减速器,另一种是谐波减速器。
RV减速器因具有更高的刚度和回转精度,一般被放置在大臂、肩部等重负载位置;谐波减速器则被放置在小臂及手腕部。
驱动控制系统驱动控制系统主要用于控制机器人按照设定的运动参数进行运动。
其主要包含伺服驱动器、伺服电机和控制器。
(1)伺服电机主要用于驱动机器人的关节,要求具备最大功率质量比和扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围;(2)伺服驱动器是驱动伺服电机进行运动的装置,根据控制器的指令,伺服驱动器给予伺服电机相应的电流,从而保证伺服电机按照需求的运动速度、加速度、运转位置等条件进行运动,从保证机械臂的运动达到设定要求。
(2)控制器可对其内部参数进行人工设定而实现对机器人的位置控制、速度控制和转矩控制等多种功能。
六轴串联机器人“轴”作用传统六轴工业机器人一般有6个自由度,常见的包含旋转(S轴),下臂(L轴)、上臂(U轴)、手腕旋转(R轴)、手腕摆动(B轴)和手腕回转(T 轴)。
6个关节合成实现末端的6自由度动作。
一轴:第一个轴是连接底座的部分,承载着整个机器人的重量和和底座的左右转动;二轴:控制机器人大臂的前后摆动;三轴:控制机器人小臂的前后摆动;四轴:控制机器人小臂旋转;五轴:控制和上下微调机械手手腕的转动,通常是当产品抓取后可以进行产品翻转的动作;六轴:用于末端夹具部分的旋转功能,可更精确定位到产品。
详解六轴关节机器人运动原理和机械结构!附送3D实体模型!
详解六轴关节机器人运动原理和机械结构!附送3D实体模型!什么是关节机器人?关节机器人(Robot joints),也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一。
适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。
关节机器人的分类关节机器人的摆动方向有铅垂方向和水平方向两种,因此这类机器人又可分为垂直关节机器人和水平关节机器人。
垂直关节机器人如上图所示,模拟了人类的手臂功能,由垂直于地面的腰部旋转轴(相当于大臂旋转的肩部旋转轴)带动小臂旋转的肘部旋转轴以及小臂前端的手腕等构成。
手腕通常由2~3个自由度构成。
其动作空间近似一个球体,所以也称多关节球面机器人。
其优点是可以自由地实现三维空间的各种姿势,可以生成各种复杂形状的轨迹。
相对机器人的安装面积.其动作范围很宽。
缺点是结构刚度较低,动作的绝对位置精度磨较低。
它广泛应用于代替人完成装配作业、货物搬运、电弧焊接、喷涂、点焊接等作业场合。
水平关节机器人如上图在结构上具有串联配置的二个能够在水平面内旋转的手臂,其自由度可以根据用途选择2~4个,动作空间为一圆柱体。
水平关节机器人的优点是在垂直方向上的刚性好,能方便地实现二维平面上的动作,在装配作业中得到普遍应用。
此外,还可以按照关节机器人的工作性质分类,可分为很多种,比如:搬运机器人,点焊机器人,弧焊机器人,喷漆机器人,激光切割机器人等。
关节机器人的优缺点关节机器人的优点1)结构紧凑,工作范围大而安装占地面积小。
2)具有很高的可达性。
关节坐标式机器人可以使其手部进入像汽车车身这样一个封闭的空间内进行作业,而直角坐标式机器人不能进行此类作业。
3)因为没有移动关节,所以不需要导轨。
转动关节容易密封,由于轴承件是大量生产的标准件,则摩擦小,惯性小,可靠性好。
4)所需关节驱动力矩小,能量消耗较小。
5)代替很多不适合人力完成、有害身体健康的复杂工作。
关节机器人的缺点1)肘关节和肩关节轴线是平行的,当大、小臂舒展成一直线时,虽能抵达很远的工作点,但机器人的结构刚度比较低。
六轴工业机器人的结构

六轴工业机器人的结构六轴工业机器人是一种高度灵活、功能强大的自动化设备。
它由六个关节组成,每个关节都可以进行独立运动,使机器人能够在各种复杂任务中精确操作。
下面将为大家介绍六轴工业机器人的结构。
首先,我们来看机器人的基本组成部分。
六轴机器人由底座、臂部、手部和控制系统组成。
底座是机器人的稳定支撑,臂部是连接各个关节的部分,手部负责完成具体任务,而控制系统则是机器人的智能大脑。
接下来是机器人的六个关节。
每个关节都有一个电机和减速器,用于驱动机器人的运动。
这些关节相互连接,形成机器人的骨架。
它们可以让机器人在三维空间内自由移动,并实现各种复杂的姿态。
每个关节都有自己的旋转轴,使机器人能够在不同方向上进行运动。
集中控制各个关节的电机,并通过编码器来监测实际位置,从而实现精确的运动控制。
这样的设计使得机器人能够灵活适应各种任务需求。
此外,机器人的手部也是非常重要的一部分。
它可以根据需要安装各种工具或夹具,完成不同的操作。
手部通常由几个可伸缩的指节和一个末端执行器组成。
末端执行器类似于人的手指,可以进行抓取、放置、旋转等各种动作。
最后,我们来谈一谈控制系统。
控制系统是机器人的大脑,负责接收并处理来自外部和传感器的信号,然后生成相应的输出命令,控制机器人的运动和行为。
现代的控制系统通常集成了先进的感知和决策算法,使机器人能够实现自主智能操作。
总的来说,六轴工业机器人的结构非常复杂和精确。
它们能够在工业生产线上扮演重要角色,提高生产效率和质量。
希望通过本文的介绍,大家对六轴机器人的结构有了更深入的了解,并对其在工业自动化领域的应用有一定的指导意义。
六轴机器人的组成

六轴机器人的组成
六轴机器人是目前工业自动化领域中应用最广泛的机器人之一,其
由多个部分组成。
下面是六轴机器人的组成和功能说明:
1. 机械臂
机械臂是机器人的主体部分,由多个关节组成,可以完成复杂的动作。
它的长度、材质和精度等参数需要根据具体需求进行选择和设计。
2. 控制系统
控制系统包括硬件和软件两部分,主要用于控制机器人的动作和运动
轨迹。
它需要与机械臂、传感器等其他部件协同工作,实现准确的操作。
3. 传感器
传感器用于感知环境和物体的位置、形状、大小等信息,并将这些信
息反馈给机器人的控制系统,以调整机器人的动作和运动轨迹。
4. 末端执行器
末端执行器指的是机械臂末端的装置,通常包括夹爪、吸盘等工具。
它负责机器人的具体操作,例如夹取、装配、搬运等。
5. 电源系统
电源系统提供机器人的电力供应,它需要同时满足机器人的功率需求和安全要求。
6. 通信模块
通信模块用于与其他设备进行数据交互,例如与工厂信息系统、自动化控制系统等进行实时通讯。
在一些应用场景中,还需要涉及到无线通讯和网络连接。
以上就是六轴机器人的主要组成部分。
在应用过程中,可以根据具体需要进行定制和改进,以满足不同的生产需求。
六轴无人机结构

1.结构形式
a)六旋翼无人机通常采用六个旋翼作为飞行器的动力源。
六个旋翼处于同一平面。
相邻两旋翼,一个逆时针
旋转,一个顺时针旋转,以抵消反扭矩作用力。
六个电机对称的安装在飞行器的支架末端。
且对角线上相对的两旋翼旋向相反。
支架中间的工作台上方信号接送机,GPS定位模块等,中间层放飞行控制计算器、电流电调集成板。
下层安装飞行器电池,并且预留空间作为模块化元件的存放空间(如航拍所需的摄像机和云台、实时监测的传感器模块、采水装置等)。
六旋翼无人机最大的优点在于升级空间广阔,动力充足,飞行平稳以及抗逆性优秀。
机架形势图如1-1。
1-1
1.2工作原理
以下为六轴无人机基本运动的原理
1.3 机架与叶桨的选择
1.3.1桨叶的选择
对流角进行近似计算后导出一下公式
由此等式可知,螺旋桨的阻力扭转,其大小取决于桨叶的螺旋角和桨叶表面的粗糙程度,现拟定1255MOTOR 碳纤维桨作为无人机的工作桨。
1.3.2机架的选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.结构形式
a)六旋翼无人机通常采用六个旋翼作为飞行器的动力源。
六个旋翼处于同一平面。
相邻两旋翼,一个逆时针
旋转,一个顺时针旋转,以抵消反扭矩作用力。
六个电机对称的安装在飞行器的支架末端。
且对角线上相对的两旋翼旋向相反。
支架中间的工作台上方信号接送机,GPS定位模块等,中间层放飞行控制计算器、电流电调集成板。
下层安装飞行器电池,并且预留空间作为模块化元件的存放空间(如航拍所需的摄像机和云台、实时监测的传感器模块、采水装置等)。
六旋翼无人机最大的优点在于升级空间广阔,动力充足,飞行平稳以及抗逆性优秀。
机架形势图如1-1。
1-1
1.2工作原理
以下为六轴无人机基本运动的原理
1.3 机架与叶桨的选择
1.3.1桨叶的选择
对流角进行近似计算后导出一下公式
由此等式可知,螺旋桨的阻力扭转,其大小取决于桨叶的螺旋角和桨叶表面的粗糙程度,现拟定1255MOTOR 碳纤维桨作为无人机的工作桨。
1.3.2机架的选择。