嵌入式系统及应用-Expt7-ARM RTC
Arm7应用

• 存储器控制器
• • 总线仲裁 • – 处理来自ARM7和外设数据控制器的请 求 • – 3个1M 字节的片内存储区 • – 一个256M 字节的片内外设区 • • 对齐(alignment)检测 • • 重映射(Remap)命令
• – 低供耗RC 振荡器,3 到20MHz 的片上 振荡器和一个PLL • • 电源管理控制器(PMC) • – 可以通过软件进行电源优化 • – 三个可编程的外部时钟信号 • • 先进的中断控制器(AIC) • 调试单元(DBGU) • • 周期性间隔定时器(PIT) • • 时间窗看门狗(WDT) • • 实时定时器(RTT) • – 时钟来源于片内RC 振荡器
•
随着技术的发展和应用的需求,对嵌入式系统的应用要求 越来越高,传统的系统机应用和嵌入式应用的界限越来越模 糊,以51系列为主的单片机应用越来越不适应这种需求,而 以ARM为内核的32位高档单片机经过数年的发展,价格越来 越低,接近单片机的成本,而性能又高很多,有操作系统支 持,在很多领域已经取代了8位单片机的应用,这也是大势所趋。
ARM7TDMI 处理器综述
ARM7TDMI内核有两个指令集,既可以 执行高性能32位的ARM®指令集,也可 以执行16位的高代码密度Thumb®指令集, 从而可以使用户在高性能和高代码密度 之间进行平衡。基于ARMv4T 冯-诺依曼 结构的RISC 处理器,具有三级流水线, 即指令获取(F) 、解码(D)和执行(E)三个 阶段。运行速度可达55 MHz, 0.9 MIPS/MHz
常见嵌入式系统三件套:ARM 、DSP、FPGA/CPLD….Βιβλιοθήκη ARM 、DSP、FPGA对比
• ARM:是32位单片机,由于结构和计算速度的原因,主要做控制, 目前适合做事务处理或者中低端应用,从中高级工控到简单语音/ 图片(不含视频)处理 。 • DSP:它从16位~32位,内部采用哈佛结构,特别适合数据处理。 其中16位DSp适合中高级工控到简单语音/图片(不含视频)处理; 其中32位DSp适合复杂语音/图片/视频处理 ,综合速度比fpga慢 比arm快,做控制也可以大材小用,在控制方面编程难 不如arm通 用性好 • FPGA:新型FPGA可以用内部乘法器/寄存器/内存块构造软核, 例如构造ARM,则可以实现ARM的功能;若构造成DSP,则可以 实现DSP的功能。不过FPGA的功耗较大,一般情况下构造 ARM/DSP不如专用ARM/DSP方便,成本也高,但是在高速信号 处理时,可以采用并行结构,大大提高处理速度,超过目前最快 的DSP。
嵌入式计算系统

总裁
3
致力于列车运行控制和铁路信号应用 的 SIL4 认证商业现货 (COTS) 故障 安全容错系统
ControlSafe™ 安全平台
凭借在开发高度可靠和可用的嵌入式计算机系统方面逾 30 年的专业技术,雅特生科技在商业现货 (COTS) 故障安全容错计算机 系统方面,已成为铁路系统集成商和铁路应用提供商的首选供应商。
技术合作伙伴
雅特生科技与其他行业领头公司密切合作,赋予您丰富的技术和资 源选择,为您提供已经通过验证且具有强大技术支持的解决方案。 如需了解雅特生科技技术合作伙伴的更多信息,请访问: /computing/about-us/partners 6Wind 博通 Cavium Networks Clavister 戴尔 Elma Electronics ENEA GDCA 慧与 Intel® IP Infusion NXP Octasic Inc. 红帽 SANBlaze Seagate Vantrix VMware 风河
嵌入式计算平台依托于一个广泛且强大的生态系统,这个生态系统 包括标准机构、行业协会、硬件和软件供应商。雅特生科技凭借其 理事会会员的身份和重要委员会的地位,将宝贵的创新技术和多年 的丰富经验投入到公认的标准制定机构、规范组织以及行业协会。 Cavium Networks 促进客户 终端服务合作商 (PACE) 戴尔 OEM 解决方案 ETSI Intel® 物联网解决方案联盟 Intel® 网络构建者 Microsoft® 合作伙伴网络 网络智能联盟 Nokia Cloudband NXP® 合作伙伴 OpenSAF OPNFV Open Daylight PICMG® 红帽 Linux 开源云平台 RSSI 服务可用性论坛 VITA 风河 Titanium Cloud
嵌入式系统概述(2)

ARM1ቤተ መጻሕፍቲ ባይዱE系列微处理器
ARM10E系列微处理器具有高性能、低功耗的特点,由于采用了新的体系结构,与同 等的ARM9器件相比较,在同样的时钟频率下,性能提高了近50%,同时,ARM10E系 列微处理器采用了两种先进的节能方式,使其功耗极低。 ARM10E系列微处理器的主要特点如下: 支持DSP指令集,适合于需要高速数字信号处理的场合。 6级整数流水线,指令执行效率更高。 支持32位ARM指令集和16位Thumb指令集。 支持64位的高速AMBA总线接口。 支持VFP10浮点处理协处理器。 全性能的MMU,支持Windows CE、Linux、Palm OS等多种主流嵌入式操作系统。 支持数据Cache和指令Cache,具有更高的指令和数据处理能力 主频最高可达400MIPS。 内嵌并行读/写操作部件。 ARM10E系列微处理器主要应用于下一代无线设备、数字消费品、成像设备、工业控 制、通信和信息系统等领域。 ARM10E系列微处理器包含ARM1020E、ARM1022E和ARM1026EJ-S三种类型,以适 用于不同的应用场合。
目前的ARM7和ARM9内核的芯片最大速度只能到 400MHz。目前最快的嵌入式处理器为Intel的 Xscale,最高主频为500MHz。
SecurCore系列微处理器
SecurCore系列微处理器专为安全需要而设计,提供了完善的32位 RISC技术的安全解决方案,因此,SecurCore系列微处理器除了具 有ARM体系结构的低功耗、高性能的特点外,还具有其独特的优势, 即提供了对安全解决方案的支持。 SecurCore系列微处理器除了具有ARM体系结构各种主要特点外, 还在系统安全方面具有如下的特点: 带有灵活的保护单元,以确保操作系统和应用数据的安全。 采用软内核技术,防止外部对其进行扫描探测。 可集成用户自己的安全特性和其他协处理器。
嵌入式开发ARM7试验手册下
主程序流程/*************************************************************************** * 文件名:LEDCON.C* 功能:LED闪烁控制。
对发光二极管LED4进行控制,采用软件延时方法。
* 使用I/O口直接控制LED,采用灌电流方式。
* 说明:将跳线器JP4_LED4短接。
**************************************************************************** #include "config.h"#define LEDCON 0x02000000 /* P0.25引脚控制LED4,低电平点亮 *//*************************************************************************** * 名称:DelayNS()* 功能:长软件延时* 入口参数:dly 延时参数,值越大,延时越久* 出口参数:无**************************************************************************** void DelayNS(uint32 dly){ uint32 i;for(; dly>0; dly--)for(i=0; i<50000; i++);}/*************************************************************************** * 名称:main()* 功能:控制LED闪烁**************************************************************************** int main(void){ PINSEL0 = 0x00000000; // 设置所有管脚连接GPIOPINSEL1 = 0x00000000;IO0DIR = LEDCON; // 设置P0.9连接的LED4控制口为输出while(1){ IO0SET = LEDCON;DelayNS(30);(1) 仿照上册“Keil for ARM实例2:A/D程序设计与电路彷真”的例子创建工程LedCon。
嵌入式linux在arm开发板上的移植-PPT课件

引导程序(bootloader)
Boot Loader 的 stage2 通常包括以下步骤(以执行的先后顺序):
初始化本阶段要使用到的硬件设备
检测系统内存映射(memory map)
将 kernel 映像和根文件系统映像从 flash 上读到 RAM 空间中
为内核设置启动参数
引导程序(bootloader)
嵌入式系统的引导文件的下载
2.通用的ICE
ARM的硬件开发工具主要包括两类仿真器,一是JTAG仿真器,二 是全功能在线仿真器。
JTAG仿真器是利用ARM处理器中的调试模块的功能,通过其JTAG 边界扫描口来与仿真器连接,如Multi ICE、JEENI仿真器等 全功能在线仿真器,由于其信真头完全取代目标板上的CPU,因而 功能非常强大
嵌入式系统的引导文件的下载
JTAG主要的信号线
TDO Input TDI Output TCK Output TMS Output
Test Data Out from target to ICE Test Data In from ICE to target Test Clock output from ICE to the target Test Mode Select
跳转去执行这 2K 的程序。
嵌入式系统的引导文件的下载
MX1 的bootstrap 模式
MX1提供了4条复位引脚,复位时引脚不同的电平组合可以从不同 的片选端启动系统。自举模式所能接受的是一种专门格式的文本文 件,包括数据和要写入/读出的地址。 通过usb接口下载
引导程序(bootloader)
嵌入式系统及应用实验内容
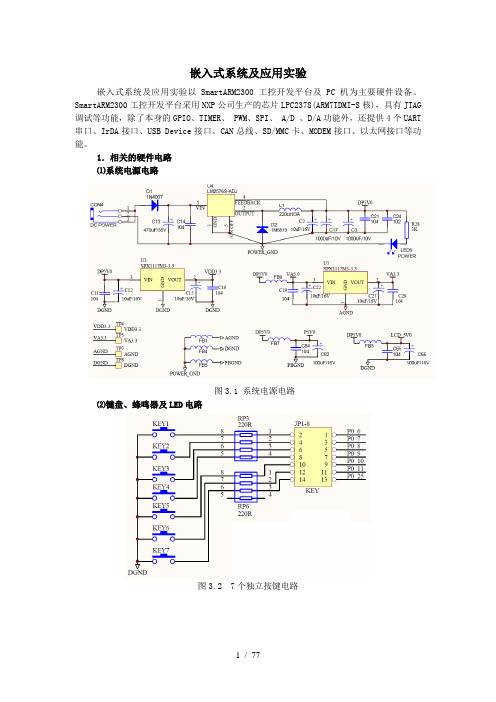
嵌入式系统及应用实验嵌入式系统及应用实验以SmartARM2300工控开发平台及PC机为主要硬件设备。
SmartARM2300工控开发平台采用NXP公司生产的芯片LPC2378(ARM7TDMI-S核),具有JTAG 调试等功能,除了本身的GPIO、TIMER、 PWM、SPI、 A/D 、D/A功能外,还提供4个UART 串口、IrDA接口、USB Device接口、CAN总线、SD/MMC卡、MODEM接口、以太网接口等功能。
1.相关的硬件电路⑴系统电源电路图3.1 系统电源电路⑵键盘、蜂鸣器及LED电路图3.2 7个独立按键电路图3.3 直流蜂鸣器电路图3.4 SPI驱动8个LED指示灯⑶串行口接口电路图3.5 UART0&UART2&UART3串行口接口电路⑷ IrDA(红外)通讯接口电路图3.6 IrDA(红外)通讯接口电路⑸ JTAG 调试接口、RST复位键及ISP选择电路图3.7 JTAG 调试接口电路图3.8 RST复位键及ISP选择电路2.跳线器说明SmartARM2300工控开发平台跳线器说明如表3.1所列。
JP1跳线布局如图3-9所示。
图3.9 JP1跳线布局表3.1 SmartARM2300跳线器一览表跳线器标号I/O 功能说明I/O复用情况JP1 JP1-1 RXD3 P4.29 UART3接口,至SP3232E输入端,短接时有效JP1-5的IR_R,做UART3实验时,必须将JP1-5的IR_R跳线断开TXD3 P4.28 JP1-5的IR_T,做UART3实验时,必须将JP1-5的IR_T跳线断开JP1-2 RXD0 P0.3 UART0接口,至SP3232E输入端,短接时有效TXD0 P0.2JP1-3 RXD2 P0.11 UART2接口,至SP3232E输入端,短接时有效TXD2 P0.10JP1-4 MDCD P2.3UART1接口,至SP3232E输入端,具有MODEM接口功能,短接时有效MDSR P2.4MRXD P2.1 JP24接口MCTS P2.2MRI P2.6MDTR P2.5MTXD P2.0 JP24接口MRTS P2.7JP1-5 IR_EN P3.26 模式选择,短接时有效IR_R P4.29IrDA收发器数据输出,短接时有效JP1-1的RXD3,做IrDA实验时,必须将JP1-1的RXD3跳线断开IR_T P4.28IrDA收发器数据输入,短接时有效JP1-1的TXD3,做IrDA实验时,必须将JP1-1的TXD3跳线断开JP1-6 4线,CAN控制器发送/接收线JP1-7 9线,SD/MMC卡控制及数据线JP1-8 KEY1 P0.6 独立按键1,短接时有效KEY2 P0.7 独立按键2,短接时有效KEY3 P0.8 独立按键3,短接时有效KEY4 P0.9 独立按键4,短接时有效KEY5 P0.10 独立按键5,短接时有效KEY6 P0.11 独立按键6,短接时有效KEY7 P0.25 独立按键7,短接时有效JP1-9 BEEP P1.27 蜂鸣器驱动输入,短接时有效JP1-10 MOSI P1.2474HC595与SPI接口连接的跳线,短接时有效/CS P1.21SCLK P1.20MISO P1.23JP4 V-TEST P1.31 LPC2378片内A/D的AD0.5通道电压输入,短接时有效JP5 ISP P2.10 ISP功能使能,短接时有效实验一 ADS集成开发环境使用与仿真调试一.实验目的熟悉ADS集成开发环境与仿真调试的使用方法。
嵌入式linux arm时间同步方法

嵌入式linux arm时间同步方法嵌入式Linux ARM时间同步方法在嵌入式系统中,时间同步是非常重要的一个功能。
它可以确保系统中各个设备的时间一致,以便于各个模块之间的协同工作。
本文将介绍一些在嵌入式Linux ARM平台上实现时间同步的方法。
一、使用NTP协议进行时间同步NTP(Network Time Protocol)是一种用于同步网络中各个设备时间的协议。
在嵌入式Linux ARM系统中,可以通过安装和配置NTP服务器来实现时间同步。
具体步骤如下:1. 安装NTP服务器软件。
可以通过在终端中执行相应的命令来安装NTP服务器软件,例如在Debian系列系统中可以使用apt-get命令来安装。
2. 配置NTP服务器。
可以通过编辑配置文件/etc/ntp.conf来配置NTP服务器。
在配置文件中,需要指定一些NTP服务器的参数,例如要同步的时间服务器的地址等。
3. 启动NTP服务器。
在配置完成后,可以使用命令启动NTP服务器,例如在Debian系列系统中可以使用service命令来启动。
4. 配置客户端设备。
在每个需要同步时间的客户端设备上,需要配置NTP客户端。
可以通过编辑配置文件/etc/ntp.conf来配置NTP 客户端,指定要同步的时间服务器的地址。
5. 同步时间。
在配置完成后,可以使用命令手动同步时间,或者设置自动同步时间的策略。
一般情况下,NTP客户端会定期向NTP 服务器发送请求,以获取最新的时间信息。
二、使用PPS信号进行时间同步PPS(Pulse Per Second)信号是一种精确的时间信号,可以用于实现高精度的时间同步。
在嵌入式Linux ARM系统中,可以通过配置PPS信号来实现时间同步。
具体步骤如下:1. 配置GPIO引脚。
首先需要选择一个GPIO引脚,将其配置为输入模式,并连接到一个精确的时间源上,例如GPS模块的PPS输出引脚。
2. 配置内核。
在Linux内核中,需要配置相应的驱动程序来接收和处理PPS信号。
嵌入式系统原理及应用arm

嵌入式系统原理及应用arm嵌入式系统原理及应用ARM嵌入式系统是一种专门的计算机系统,旨在执行特定任务。
它通常被设计为嵌入到其他设备或系统中,以实现特定的控制功能。
这些设备可以是家用电器、汽车、工业机器人、智能手机等。
嵌入式系统通常要求具有可靠性高、成本低、功耗低等特点,以满足实时要求。
ARM架构是一种最常用的嵌入式系统架构。
ARM起初是Acorn RISC Machine 的简称,后来改称为Advanced RISC Machine。
ARM架构的特点是精简指令集和低功耗设计。
它采用简单的指令集和流水线技术,可以在低功耗的同时提供高性能和高效率的计算能力。
ARM处理器广泛应用于各种嵌入式系统中。
它的应用领域包括智能手机、平板电脑、数字电视、游戏机、路由器、无线通信设备等。
ARM处理器的主要特点是功耗低、性能高、集成度高、可扩展性好。
在智能手机和平板电脑领域,ARM 处理器几乎占据了绝对的市场份额。
嵌入式系统的原理包括硬件和软件两个方面。
硬件方面,嵌入式系统通常由处理器、存储器、输入输出设备和外围接口组成。
其中,处理器是系统的核心,负责处理数据和执行指令。
存储器通常包括闪存、RAM和ROM,用于存储程序和数据。
输入输出设备用于和外部环境进行交互,如键盘、显示器、传感器等。
外围接口用于连接其他设备和系统。
软件方面,嵌入式系统的开发过程包括系统设计、程序开发、测试和调试等阶段。
开发嵌入式软件需要考虑资源有限、实时要求、可靠性等特点。
常用的嵌入式软件开发工具包括编译器、调试器、仿真器等。
编程语言上,C语言是最常用的嵌入式软件开发语言,它有较高的效率和可移植性。
嵌入式系统的应用非常广泛。
在家电领域,嵌入式系统被应用于空调、洗衣机、电视等产品中,实现智能控制和便捷操作。
在汽车工业中,嵌入式系统被用于发动机控制、车载导航、安全系统等领域。
在工业自动化中,嵌入式系统被应用于机器人、传感器、PLC控制器等设备中,实现自动化生产和监测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ARM RTC寄存器 寄存器:BCD 寄存器
ARM RTC寄存器 寄存器:BCD 寄存器
ARM RTC寄存器 寄存器:BCD 寄存器
ARM RTC寄存器 寄存器:BCD 寄存器
主模块:Main() 主模块
void Main(void) { MMU_Init(); ChangeClockDivider(1,1); // 1:2:4 ChangeMPllValue(0xa1,0x3,0x1); // FCLK=202.8MHz Port_Init(); Int_Init(); spi_LedInit(); //led初始化 初始化 Rtc_Init(9, 4, 10, 13, 59, 20); //实时时钟初始化 实时时钟初始化 //Rtc_EnTick(127, ISR_RtcTick); //启用 启用RTC tick中断 启用 中断 Rtc_EnSecAlarm(0x00, ISR_RtcAlarm); while(1) { if((g_uiEvent & BIT_TICK) != 0) { spi_LedDisplay(0, g_uiTickCount % 10, 0); g_uiEvent &= ~BIT_TICK; } }
RTC模块 模块:Rtc_EnSecAlarm () 模块
void Rtc_EnSecAlarm(BCD val, fnISR isr) { Int_InstallIsr(VC_OFFSET_RTC, isr); rRTCALM |= 0x41; rALMSEC = val; ENABLE_INT(BIT_RTC); }
RTC原理图 原理图
ARM RTC寄存器 寄存器:RTCCON 寄存器
ARM RTC寄存器 寄存器:TickCount 寄存器
ARM RTC寄存器 寄存器:Alarm 寄存器
ARM RTC寄存器 寄存器:Alarm 寄存器
ARM RTC寄存器 寄存器:Alarm 寄存器
ARM RTC寄存器 寄存器:Alarm 寄存器
RTC模块 模块:Rtc_GetDate() 模块
//获取日期 获取日期 void Rtc_GetDate(BCD *pYear, BCD *pMonth, BCD *pDate) { if(pDate != NULL) { *pDate = rBCDDATE; } if(pMonth != NULL) { *pMonth = rBCDMON; } if(pYear != NULL) { *pYear = rBCDYEAR; } }
RTC应用 应用
在一个嵌入式系统中,实时时钟单元可以提供可靠的 在一个嵌入式系统中, 时钟,包括时分秒和年月日; 时钟,包括时分秒和年月日;即使在系统处于关机状态 它也能正常工作(通常采用后备电池供电), ),它的 下,它也能正常工作(通常采用后备电池供电),它的 外围也不需要太多的辅助电路, 外围也不需要太多的辅助电路,典型的就是只需要一个 高精度的晶振。 高精度的晶振。
RTC模块 模块:Rtc_GetTime () 模块
void Rtc_GetTime(BCD *pHour, BCD *pMinute, BCD *pSecond) { if(pSecond != NULL) { *pSecond = rBCDSEC; } if(pMinute != NULL) { *pMinute = rBCDMIN; } if(pHour != NULL) { *pHour = rBCDHOUR; } }
嵌入式系统及应用 Expt7: ARM RTC :
实验任务
学习ARM中断处理机制 中断处理机制 学习 掌握ARM中断处理程序的编写 中断处理程序的编写 掌握 写程序实现: 写程序实现 LED0上显示秒计数器 在LED0上显示秒计数器 上显示时/分 秒 在LED2~LED0上显示时 分/秒;实时时钟
时钟数据采用BCD 编码; 编码; 时钟数据采用 能够对闰年的年月日进行自动处理; 能够对闰年的年月日进行自动处理; 具有告警功能,当系统处于关机状态时, 具有告警功能,当系统处于关机状态时,能产生告警 中断; 中断; 无2000 年问题; 年问题; 具有独立的电源输入; 具有独立的电源输入; 提供毫秒级时钟中断, 提供毫秒级时钟中断,该中断可用作嵌入式操作系统 的内核时钟。 的内核时钟。
RTC模块 模块:Rtc_Init() 模块
void Rtc_Init(UCHAR year, UCHAR mon, UCHAR day, UCHAR hour, UCHAR min, UCHAR sec) { UCHAR bcd; ENABLE_RTC_CON; //rRTCCON = rRTCCON & ~(0x0F) | 0x1 bcd = IntToBCD(year); rBCDYEAR = rBCDYEAR & ~(BITMSK_RTC_BCDYEAR) | bcd; bcd = IntToBCD(mon); rBCDMON = rBCDMON & ~(BITMSK_RTC_BCDMON) | bcd; bcd = IntToBCD(day); rBCDDATE = rBCDDATE & ~(BITMSK_RTC_BCDDATE) | bcd; bcd = IntToBCD(hour); rBCDHOUR = rBCDHOUR & ~(BITMSK_RTC_BCDHOUR) | bcd; bcd = IntToBCD(min); rBCDMIN = rBCDMIN & ~(BITMSK_RTC_BCDMIN) | bcd; bcd = IntToBCD(sec); rBCDSEC = rBCDSEC & ~(BITMSK_RTC_BCDSEC) | bcd; //rRTCCON = 0; //disable rtc }
主模块:ISR_RtcAlarm()/ISR_RtcTick() 主模块
volatile UINT g_uiEvent = 0; //事件位 事件位 volatile UINT g_uiTickCount = 0; //tick count
//trc alarm中断处理函数 中断处理函数 void __irq ISR_RtcAlarm(void) { CLEAR_PENDING(BIT_RTC); g_uiEvent |= BIT_RTC; } //rtc tick中断处理函数 中断处理函数 void __irq ISR_RtcTick(void) { CLEAR_PENDING(BIT_TICK); g_uiEvent |= BIT_TICK; g_uiTickCount ++; }
RTC模块 模块:Rtc_EnTick () 模块
//启用 启用rtc tick计时器 period = (tick+1)/128 sec; 计时器: 启用 计时器 void Rtc_EnTick(UCHAR tick, fnISR isr) { rTICNT = (0x80 | tick); Int_InstallIsr(VC_OFFSET_TICK, isr); ENABLE_INT(BIT_TICK); }