用stm32库函数编写的modbus源代码
基于STM32处理器的ModbusTCP/RTU网关设计

2系统硬件设计
本设 计 的处 理 器采 用S T M3 2 F1 0 3 V E, 它是 意 法 半 导 体 推 出 的 基 F A R M C o r t e x— M 3 内 核 的高性 能 微 处理 器 。 C o r t e x - M3 处理 器 是 行业 领 先 的3 2 位 处 理 器 ,适 用于具 有高 确定性 的 实时应 用 ,已专 门开 发 为 允 许 合 作 伙伴 为范 围广 泛 的 设 备 ( 包括微 控制 器 ,汽车车 体 系统 ,工 业控 制 系统 以及无 线网络 和传 感器 )开发 高性 能低 成 本的平 台 。整体 的硬件 结构 如 图2 所示 。 如 图3 所 示 , 网 关 和 客 户 机 之 间 采 用 Mo d b u s TCP 协 议 通讯 ,相 对 于 客 户 机 言 , 网关 工 作 在 服 务 器 模式 , 它通 过 以 太 网接 收 来 自客 户 机 的数 据 包 ,并 解 析 该 数 据 包 ,从 而 根 据 不 同 的 数据 指 令 执 行 相 应 的处 理 。 网关f l J Mo d b u s 串 口设备 之 间 采用 Mo d b u s RT U协议 通讯 ,相 对 于 从 设 备 而 言它 又具 有Mo d b u s 主 站功 能 。 网关 将接 收 到的 Mo d b u s TC P 协议 包 进 行协 议转 换 之后 将Mo d b u s R TU协议 帧通过 串 口发 送到 从设 备 ,并 接受 来 自从 设备 的响 应。
关键 词
S T M 3 2 F 1 0 3:M o d b u s T C P;M o d b u s E T U ; 协 议 转
换 ;u 『 P
中 图分类 号 :T P 2 4 文献标 识 码 :B
FreemodbusRTU在stm32上的移植分析

FreemodbusRTU在stm32上的移植分析在物联网时代,工业自动化领域的发展日益迅猛。
作为一种常见的通信协议,Modbus被广泛应用于工业控制系统中。
而在嵌入式系统中,STM32是一种常见的微控制器,其强大的性能和丰富的外设使其成为了工业自动化领域的首选。
本文将探讨如何将FreemodbusRTU协议移植到STM32上,并分析移植过程中的关键问题。
一、FreemodbusRTU简介FreemodbusRTU是一种基于Modbus协议的开源库,它提供了一套完整的Modbus通信接口函数,方便用户在嵌入式系统中实现Modbus通信功能。
与其他商业化的Modbus库相比,FreemodbusRTU具有开源免费的优势,同时其轻量级的特点使得它适合于资源有限的嵌入式系统。
二、STM32的特点与优势STM32是意法半导体(STMicroelectronics)推出的一款32位微控制器系列,它基于ARM Cortex-M内核,拥有丰富的外设资源和强大的性能。
STM32系列微控制器广泛应用于工业自动化、智能家居、电力电子等领域。
其中,STM32F4系列是性能最强大的一款,具有高性能的浮点运算单元和大容量的闪存,适合于对性能要求较高的应用场景。
三、移植FreemodbusRTU到STM32的步骤1. 硬件连接在移植前,需要将STM32的串口与Modbus从站设备进行连接。
通过串口,STM32可以与其他设备进行数据交换。
在连接时,需要注意串口的波特率、数据位、校验位和住手位等参数的设置,确保与Modbus从站设备保持一致。
2. 引入FreemodbusRTU库将FreemodbusRTU库的源码添加到STM32的工程中。
可以通过将源码文件直接添加到工程目录下,或者使用版本控制工具进行管理。
在引入库的同时,需要根据具体的硬件平台和编译器进行相应的配置。
3. 配置Modbus参数在移植过程中,需要根据具体的应用场景配置Modbus参数。
freemodbus在stm32上的移植
portother.c
//负责一个串口的配置 为了省事我只支持了波特率的修改
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity ) vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )负责控制串口【收/发】中断的禁止与使能 pxMBFrameCBByteReceived( ); //在串口接收中断内调用 用于通讯侦测 pxMBFrameCBTransmitterEmpty( ); //在串口发送中断内调用 用于告知完成了发送 发送缓冲为空 xMBPortSerialGetByte( CHAR * pucByte ) xMBPortSerialPutByte( CHAR ucByte ) 两个为 串口字节的收发
//
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
//Βιβλιοθήκη iRegIndex++;
usNRegs--;
}
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
受到 freeModbus 作者使用“assert()”的影响在这个里我用了__REV16()这个函数
Modbus 中文协议.PDF
STM32移植 FreeModbus 的步骤:
首先去 下载文件 一定要是官方可靠的才行,我起先为了图方便网上随便下载了一个,结果白白 浪费了一下午的时间
不知道是哪里被改动了。目前最新的版本是1.5。
stm32modbusrtu代码
stm32modbusrtu代码STM32 Modbus RTU代码概述Modbus是一种串行通信协议,用于在工业自动化系统中传输数据。
Modbus RTU是一种基于串行通信的Modbus协议版本,它使用二进制编码来传输数据。
STM32是一款微控制器,它可以通过编程来实现Modbus RTU通信。
本文将介绍如何使用STM32编写Modbus RTU代码。
硬件要求- STM32微控制器- 串口模块- Modbus RTU从机设备软件要求- Keil MDK集成开发环境- STM32CubeMX代码生成工具- Modbus库文件步骤1.创建新项目首先,在Keil MDK中创建一个新的STM32项目。
2.配置MCU参数使用STM32CubeMX配置MCU参数,包括时钟频率、GPIO引脚等。
3.添加库文件和头文件将Modbus库文件和头文件添加到项目中。
4.初始化串口模块使用STM32CubeMX初始化串口模块,并设置波特率、数据位、停止位等参数。
5.初始化Modbus从机设备使用Modbus库文件初始化从机设备,并设置地址、函数码等参数。
6.编写读取数据函数编写函数以读取从机设备的数据。
该函数应该发送一个读取请求并接收响应数据。
7.编写写入数据函数编写函数以写入数据到从机设备。
该函数应该发送一个写入请求并接收响应数据。
8.编写主函数在主函数中调用读取数据和写入数据函数。
9.编译和烧录程序使用Keil MDK编译程序,并将其烧录到STM32微控制器中。
总结本文介绍了如何使用STM32编写Modbus RTU代码。
通过按照上述步骤,您可以创建一个可靠的Modbus RTU通信系统,用于在工业自动化系统中传输数据。
发个STM32的MODBUS主节点程序

发个STM32的MODBUS主节点程序由于课题的原因被强迫用了STM32(本来打算2440的),因此认识阿莫电子,看到了版上一众高手,并学了不少知识。
在课题中很多芯片资料的细节都是来源于阿莫电子,快毕业了,潜水了太久,就分享一点STM32的程序,反正很多都是从坛子里学的,我只是整理下拿来用了,献丑了。
处理器STM32F103ZET6是买论坛上一摄像头大师的(感谢免费帮我修了次3232),软件用的KEIL3.5。
我的MODBUS是驱动变频器的,做主节点用,主要实现03功能号和06功能号。
#define RS485Read (GPIO_WriteBit(GPIOG, GPIO_Pin_13,Bit_RESET))#define RS485Write (GPIO_WriteBit(GPIOG, GPIO_Pin_13,Bit_SET))//MODBUS的06功能号,读多个寄存器void ReadInverter(UINT16 Addr,UINT8 N,UINT16 *Values){UINT8 i,l;UINT16 tmp;UINT16 *p;//在发送缓冲里面填数据Inverter.SendBuf[0]=InverterAddr;Inverter.SendBuf[1]=ReadID;Inverter.SendBuf[2]=Addr>>8;Inverter.SendBuf[3]=Addr&0XFF;Inverter.SendBuf[4]=0;Inverter.SendBuf[5]=N;//计算CRC16,填入发送缓冲尾CalCRC(Inverter.SendBuf,6,Inverter.SendBuf+6);//置RS485发送状态RS485Write();//发送数据缓冲Uart_Send(InverterUart,Inverter.SendBuf,8);//清发送缓冲PurgeRecvBuf();m=LISTENING;//关定时器TIM5TIM_Cmd(TIM5, DISABLE);USART_ITConfig(InverterUart,USART_IT_RXNE,ENABLE);RS485Read();Delay(200,m);//既定延时400ms,若m的值变化则退出ResetInverterComm();m=TIME_OUT;//接收缓冲中数据长度为0,则表示超时无应答if(Inverter.Length==0){Inverter.Error=TIME_OUT; //("变频器应答超时");return ;}m=FINISHED;//长度校验if(Inverter.RecvBuf[2]!=Inverter.Length-5){Inverter.Error=FrameErr;return ;//("变频器数据长度错误");}CalCRC(Inverter.RecvBuf,Inverter.Length-2,CRC16);//CRC校验if(*(UINT16 *)(CRC16)!=*(UINT16 *)(Inverter.RecvBuf+Inverter.Length-2)) {Inverter.Error=CheckErr;return ;//("变频器校验错误");}else if(Inverter.RecvBuf[1]==ReadID+0X80){//("变频器读错误,错误号在第三个字节");switch(Inverter.RecvBuf[2]){case Invalid_Func:i =Invalid_Func; break;case Invalid_Addr:i =Invalid_Addr; break;case Invalid_Data:i =Invalid_Data; break;case InverterErr :i =InverterErr ; break;case InverterBusy:i =InverterBusy; break;case CheckErr :i =CheckErr ; break;default :i =UnknowErr ; break;}Inverter.Error=i;return ;}//校验一切正常,变频器操作成功else if(Inverter.RecvBuf[1]==ReadID){l=Inverter.RecvBuf[2]+3;p=(UINT16 *)Values;//接收数据for(i=3;i<l;i+=2){tmp=Inverter.RecvBuf[i];tmp=tmp<<8;tmp=tmp+Inverter.RecvBuf[i+1];*p=tmp;p++;}Inverter.Error=MODBUS_OK;//("读入参数成功:");return ;}//校验一切正常,变频器操作失败else if(Inverter.RecvBuf[1]!=ReadID&&Inverter.RecvBuf[1]!=ReadID+0X80) {Inverter.Error=UnknowErr;//("变频器应答错误");return ;}return ;}void TIM5_IRQHandler(void){if(TIM_GetITStatus(TIM5,TIM_IT_Update)!=RESET){TIM_ClearITPendingBit(TIM5, TIM_IT_Update);TIM_ClearFlag(TIM5, TIM_IT_Update);m=FINISHED;TIM_Cmd(TIM5, DISABLE);USART_ITConfig(InverterUart,USART_IT_RXNE,DISABLE);}}void USART3_IRQHandler(void){if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET){USART_ClearITPendingBit(USART3, USART_IT_RXNE);if(Inverter.Length<=17){Inverter.RecvBuf[Inverter.Length]=USART_ReceiveData(USART3);Inverter.Length++;}TIM_Cmd(TIM5, ENABLE);TIM_SetCounter(TIM5,0x0000);}}。
stm32modbusrtu代码

STM32 Modbus RTU 代码简介Modbus是一种通信协议,常用于工业自动化领域中的设备间通信。
STM32是一系列由意法半导体(STMicroelectronics)开发的32位微控制器。
在本文中,我们将探讨如何使用STM32微控制器编写Modbus RTU代码。
Modbus RTU 协议Modbus RTU是Modbus协议的一种变体,它使用二进制编码来进行数据传输。
RTU代表”Remote Terminal Unit”,是指远程终端单元,也就是Modbus网络中的从设备。
Modbus RTU协议使用串口通信,并且以字节为单位进行数据传输。
每个字节都包含8位数据位和1位奇偶校验位。
STM32 微控制器STM32微控制器是一款高性能、低功耗的32位ARM Cortex-M内核微控制器。
它具有丰富的外设和强大的处理能力,非常适合用于工业自动化等领域。
STM32微控制器支持多个串口接口,并且具有强大的时钟和计时功能,非常适合用于实现Modbus RTU通信。
编写 STM32 Modbus RTU 代码要编写STM32 Modbus RTU代码,我们需要以下步骤:1. 硬件连接首先,我们需要将STM32微控制器与Modbus RTU从设备进行硬件连接。
通常,我们会使用串口接口来进行通信。
确保正确连接了串口的TX和RX引脚。
2. 配置串口在STM32的代码中,我们需要配置串口接口的参数,如波特率、数据位、校验位等。
根据Modbus RTU协议的要求,通常使用9600波特率、8个数据位和无校验位。
以下是一个配置串口的示例代码:// 配置串口void UART_Config(void){// 初始化结构体USART_InitTypeDef USART_InitStruct;// 使能串口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);// 配置波特率、数据位和停止位USART_ART_BaudRate = 9600;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;// 配置校验位为无校验USART_ART_Parity = USART_Parity_No;// 配置硬件流控制为无流控制USART_ART_HardwareFlowControl = USART_HardwareFlowControl_Non e;// 使能接收和发送功能USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 初始化串口USART_Init(USART1, &USART_InitStruct);// 使能串口USART_Cmd(USART1, ENABLE);}3. 实现 Modbus RTU 功能接下来,我们需要实现Modbus RTU的功能代码。
modbus协议在stm32f103处理器上的实现
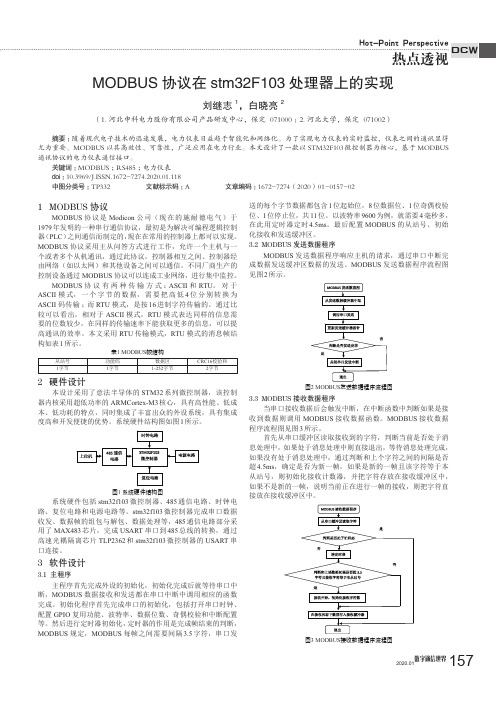
Hot-Point Perspective热点透视DCW157数字通信世界2020.011 M ODBUS 协议MODBUS 协议是Modicon 公司(现在的施耐德电气)于1979年发明的一种串行通信协议,最初是为解决可编程逻辑控制器(PLC )之间通信而制定的,现在在常用的控制器上都可以实现。
MODBUS 协议采用主从问答方式进行工作,允许一个主机与一个或者多个从机通讯,通过此协议,控制器相互之间、控制器经由网络(如以太网)和其他设备之间可以通信。
不同厂商生产的控制设备通过MODBUS 协议可以连成工业网络,进行集中监控。
MODBUS 协议有两种传输方式:ASCII 和RTU 。
对于ASCII 模式,一个字节的数据,需要把高低4位分别转换为ASCII 码传输;而RTU 模式,是按16进制字符传输的。
通过比较可以看出,相对于ASCII 模式,RTU 模式表达同样的信息需要的位数较少,在同样的传输速率下能获取更多的信息,可以提高通讯的效率。
本文采用RTU 传输模式,RTU 模式的消息帧结构如表1所示。
表1 MODBUS 帧结构从站号功能码数据区CRC16校验和1字节1字节1-252字节2字节2 硬件设计本设计采用了意法半导体的STM32系列微控制器,该控制器内核采用超低功率的ARMCortex-M3核心,具有高性能、低成本、低功耗的特点,同时集成了丰富出众的外设系统,具有集成度高和开发便捷的优势。
系统硬件结构图如图1所示。
图1 系统硬件结构图系统硬件包括stm32f103微控制器、485通信电路、时钟电路、复位电路和电源电路等。
stm32f103微控制器完成串口数据收发、数据帧的组包与解包、数据处理等,485通信电路部分采用了MAX483芯片,完成USART 串口到485总线的转换,通过高速光耦隔离芯片TLP2362和stm32f103微控制器的USART 串口连接。
3 软件设计3.1 主程序主程序首先完成外设的初始化,初始化完成后就等待串口中断,MODBUS 数据接收和发送都在串口中断中调用相应的函数完成。
基于STM32的FreeModbus从站协议移植

基于STM32的FreeModbus从站协议移植作者:胡双喜来源:《科学与财富》2018年第31期摘要:FreeModbus是一种Modbus协议的实现方式,能够方便的移植到嵌入式系统中。
本文阐述了FreeModbus的移植方式,并将其与STM32F446RE控制器相结合。
经验证表明,其能够完成基于Modbus RTU传输方式的通讯任务,具有稳定可靠的特点,可以应用于工业场合。
关键词:Modbus;STM32;实时通信一、引言随着工业IT技术的飞速发展以及工业控制系统复杂程度的提高,工业通讯网络的应用日益受到重视,通讯协议的标准化对工业控制系统的稳定性产生了极大的影响。
Modbus是一种广泛应用的工业控制网络,其具有稳定性高、易于部署和维护等优点,适合中小规模的数据传输。
FreeModbus是一种针对嵌入式系统的Modbus协议栈,支持RTU、ASCII以及TCP传输模式,并遵守BSD许可,允许用户将其应用于商业环境。
STM32是目前广泛应用的32位嵌入式微处理器之一,具有体积小、功耗低、性能高等特点,非常适合于系统的实时控制。
其中STM32F4系列是意法半导体推出的以Cortex-M4为内核的高性能控制器,能够进行复杂的计算与控制。
本文以STM32F446RE为平台,研究了FreeModbus协议的移植方法,使STM32F446RE 能够作为从站实现Modbus的通信,并支持Modbus RTU及ASCII传输模式,为未来工业控制的网络化和信息化奠定了基础。
二、FreeModbus简介Modbus是一种广泛应用于工业控制中的串行通讯协议,其实现了一个单主站的主从网络结构。
Modbus支持的数据类型包括浮点数、32为整型等多种数据类型。
目前,西门子S7 200系列等多个系列的PLC、威纶通等不同厂家、型号的触摸屏以及组态王等软件都支持Modbus 协议。
FreeModbus是专门针对嵌入式系统设计的开源协议栈,其实现了Modbus 1.1a版的应用层协议,支持RTU与ASCII两种传输模式,在FreeModbus 0.7版后,又添加了Modbus TCP传输模式的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用stm32库函数编写的modbus源代码说在前面的话:1.请勿盲目抄袭。
这个协议使用了一个定时器,所以在别处请不要再使用,如果定时器不够用,可以做虚拟定时器。
也就是采用一个物理的定时器产生时基。
在这个定时器的中断函数中可以给相应的多个定时器自加1.每个虚拟定时器可以用两个变量分别控制打开关闭,和计时。
这个已经试验通过了可行的。
其实就跟我们使用物理的定时器一样,只不过物理的定时器是用晶振产生时基。
2.这段代码已经调试通过了,也硬件试验过,没有问题,如果你出现问题了,看看你在主函数的的各种基本配置有没有完成。
如果要使用06和10号功能,你还需要在主函数中建立一个100个元素的数组,每个元素是16位。
3.写这个文档的时候,这个协议已经是半年前完成的了。
所以有些东西记得不是很清楚了,如果说错了,请以实际为准。
只是不想让这份代码死在电脑中了,所以才想起来要拿出来分享,支持开源精神。
4.如果实在实在是没有弄出来,请联系我,可以共同交流,我的邮箱:***********************#include"stm32f10x.h"/* 此Modbus协议暂时只支持RTU模式,只支持作为Modbus从设备。
暂时支持的功能码(16进制)如下表所示:01.读线圈状态(读多个输出位的状态,有效地位为0-31)02.读输入位状态(读多个输入位的状态,有效地位为0-31)03.读保持寄存器(读多个保持寄存器的数值,有效地位为0-99)04.读输入寄存器(读多个输入寄存器的数值,有效地址为0-1)05.强制单个线圈(强制单个输出位的状态,有效地位为0-31)06.预制单个寄存器(设定一个寄存器的数值,有效地址为0-99)0F.强制多个线圈(强制多个输出位的状态,有效地址为0-31)10.预制多个寄存器(设定多个寄存器的数值,有效地址为0-99)暂时支持的错误代码为:01 不合法功能代码从机接收的是一种不能执行功能代码。
发出查询命令后,该代码指示无程序功能。
(不支持的功能代码)02 不合法数据地址接收的数据地址,是从机不允许的地址。
(起始地址不在有效范围内)03 不合法数据查询数据区的值是从机不允许的值。
(在起始地址的基础上,这个数量是不合法的)供用户调用的函数有:1.void ModInit(u8 Id);//用于Modbus初始化,在函数调用前,必须初始化函数,用于Main函数中2.void ModRcv(void);//用于modbus信息接收,放在串口接收中断3.void ModSend(void);//用于modbus信息接收,放在串口发送中断例如:void USART1_IRQHandler(void) //USART1中断{if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET){void ModRcv(void);………………}if(USART_GetITStatus(USART1,USART_IT_TC)!=RESET){void ModSend(void);//用于modbus信息接收………………}}*///modbus用通讯参数u8 Tim_Out;//大于3.5个字符时间,保守取3ms (波特率9600的时候大约2点几毫秒)u8 Rcv_Complete;//一帧是否已经接受完成u8 Send_Complete;//一帧是否已经发送完成u8 Com_busy;//通讯繁忙,表示上一帧还未处理结束u8 Rcv_Buffer[210];//用来存放接收到的完整的一帧数据(第一个字节用来存放接收到的有效字节数,也就是数组中的有效字节数)u8 Send_Buffer[210];//用来存放待发送的完整的一帧数据(第一个字节用来存放待发送的有效字节数,也就是数组中的有效字节数)u8 Rcv_Data;//用来存放接收的一个字节u8 Send_Data;//用来存放要发送的一字节u8 Mod_Id;//用来标志作为从站的站号u8 Rcv_Num;//用来表示接收的一帧的有效字节数(从功能码到CRC校验)u8 Send_Num;//用来表示待发送的一帧的字节数u8 *PointToRcvBuf;//用来指向接收的数据缓存u8 *PointToSendBuf;//用来指向带发送的数据缓存u8 Comu_Busy;//用来表示能否接收下一帧数据u8 HaveMes;extern u16 HoldReg[100];//CRC校验查表用参数/* CRC 高位字节值表*/static u8 auchCRCHi[] = {0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40, 0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0, 0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41, 0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41, 0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40, 0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1, 0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40} ;/* CRC低位字节值表*/static u8 auchCRCLo[] = {0x00,0xC0,0xC1,0x01,0xC3,0x03,0x02,0xC2,0xC6,0x06, 0x07,0xC7,0x05,0xC5,0xC4,0x04,0xCC,0x0C,0x0D,0xCD, 0x0F,0xCF,0xCE,0x0E,0x0A,0xCA,0xCB,0x0B,0xC9,0x09, 0x08,0xC8,0xD8,0x18,0x19,0xD9,0x1B,0xDB,0xDA,0x1A, 0x1E,0xDE,0xDF,0x1F,0xDD,0x1D,0x1C,0xDC,0x14,0xD4, 0xD5,0x15,0xD7,0x17,0x16,0xD6,0xD2,0x12,0x13,0xD3, 0x11,0xD1,0xD0,0x10,0xF0,0x30,0x31,0xF1,0x33,0xF3, 0xF2,0x32,0x36,0xF6,0xF7,0x37,0xF5,0x35,0x34,0xF4, 0x3C,0xFC,0xFD,0x3D,0xFF,0x3F,0x3E,0xFE,0xFA,0x3A, 0x3B,0xFB,0x39,0xF9,0xF8,0x38,0x28,0xE8,0xE9,0x29, 0xEB,0x2B,0x2A,0xEA,0xEE,0x2E,0x2F,0xEF,0x2D,0xED,0xEC,0x2C,0xE4,0x24,0x25,0xE5,0x27,0xE7,0xE6,0x26,0x22,0xE2,0xE3,0x23,0xE1,0x21,0x20,0xE0,0xA0,0x60,0x61,0xA1,0x63,0xA3,0xA2,0x62,0x66,0xA6,0xA7,0x67,0xA5,0x65,0x64,0xA4,0x6C,0xAC,0xAD,0x6D,0xAF,0x6F,0x6E,0xAE,0xAA,0x6A,0x6B,0xAB,0x69,0xA9,0xA8,0x68,0x78,0xB8,0xB9,0x79,0xBB,0x7B,0x7A,0xBA,0xBE,0x7E,0x7F,0xBF,0x7D,0xBD,0xBC,0x7C,0xB4,0x74,0x75,0xB5,0x77,0xB7,0xB6,0x76,0x72,0xB2,0xB3,0x73,0xB1,0x71,0x70,0xB0,0x50,0x90,0x91,0x51,0x93,0x53,0x52,0x92,0x96,0x56,0x57,0x97,0x55,0x95,0x94,0x54,0x9C,0x5C,0x5D,0x9D,0x5F,0x9F,0x9E,0x5E,0x5A,0x9A,0x9B,0x5B,0x99,0x59,0x58,0x98,0x88,0x48,0x49,0x89,0x4B,0x8B,0x8A,0x4A,0x4E,0x8E,0x8F,0x4F,0x8D,0x4D,0x4C,0x8C,0x44,0x84,0x85,0x45,0x87,0x47,0x46,0x86,0x82,0x42,0x43,0x83,0x41,0x81,0x80,0x40} ;//声明modbus的函数void ModInit(u8 Id);//用于Modbus初始化,参数Id为站号(1-255)void ModRcv(void);//用于modbus信息接收void ModSend(void);//用于modbus信息接收void MessageHandle(u8 *pointer_in,u8 *pointer_out);//处理收到的信息帧void ReadOutputBit(u8 *pointer_1,u8 *pointer_2);//读线圈void ReadInputBit(u8 *pointer_1,u8 *pointer_2);//读输入位void ReadHoldingReg(u8 *pointer_1,u8 *pointer_2);//读保持寄存器void ReadInputReg(u8 *pointer_1,u8 *pointer_2);//读输入寄存器void ForceSingleCoil(u8 *pointer_1,u8 *pointer_2);//强制单个线圈void PresetSingleReg(u8 *pointer_1,u8 *pointer_2);//预制单个寄存器void ForceMulCoil(u8 *pointer_1,u8 *pointer_2);//强制多个线圈。