5.2差错控制基本方法
数字通信原理章 (5)
第5章 信道编码技术
5.1.2 差错控制编码的基本思想 差错控制编码的基本实现方法是在发送端给被传输的
信息附上一些监督码元,这些多余的码元与信息码元之间 以某种确定的规则相互关联。在接收端按照既定的规则校 验信息码元与监督码元之间的关系,一旦传输发生错误, 则信息码元与监督码元的关系就受到破坏,从而使接收端 可以发现错误,进而纠正错误。因此,各种编码和译码方 法是差错控制编码所要研究的问题。 5.1.3 差错控制方式
距应满足
dmin≥t+e+1 (e>t)
(5-3)
第5章 信道编码技术 图 5-2 纠错码纠错能力图示一
第5章 信道编码技术 图 5-3 纠错码纠错能力图示二
第5章 信道编码技术
5.2.3 奇偶监督码 奇偶监督码(又称为奇偶校验码)是一种最简单的检错
码,它的基本思想是在n-1位信息码元后面附加一位监督 码元,构成(n,n-1)的分组码,监督码元的作用是使码长 为n的码组中“1” 的个数保持为奇数或偶数。码组中“1” 的个数保持为奇数的编码称为奇数监督码,保持为偶数的 编码称为偶数监督码。
的一种改进形式,它不仅对每一行进行奇偶校验,同时对每 一列也进行奇偶校验。如表5-2所示的例子采用的是偶校验。
发送时,该码是按11001100、00100111、00011110、 11000000、01111011、00100111、01101001的顺序发送,而 在接收端将所接收的信号以列的形式排列,可得表5-2所示 的阵列。
(5-5)
奇偶监督码最小码距为2,无论是奇校验还是偶校验,
都只能检测出单个或奇数个错误,而不能检测出偶数个错
误,因此检错能力低,但编码效率随着n的增加而提高。
通信原理—差错控制编码基本理论
差错控制概述1。
差错的概念所谓差错,就是在通信接收端收到的数据与发送端实际发出的数据出现不一致的现象.2。
差错类型通信信道的噪声分为热噪声和冲击噪声两种。
由这两种噪声分别产生两种类型的差错,随机差错和突发差错.热噪声是由传输介质导体的电子热运动产生的,它的特点是:时刻存在,幅度较小且强度与频率无关,但频谱很宽,是一类随机噪声。
由热噪声引起的差错称随机差错。
此类差错的特点是:差错是孤立的,在计算机网络应用中是极个别的。
与热噪声相比,冲击噪声幅度较大,是引起传输差错的主要原因。
冲击噪声的持续时间要比数据传输中的每比特发送时间要长,因而冲击噪声会引起相邻多个数据位出错。
冲击噪声引起的传输差错称为突发差错。
常见的突发错是由冲击噪声(如电源开关的跳火、外界强电磁场的变换等)引起,它的特点是:差错呈突发状,影响一批连续的bit(突发长度)。
计算机网络中的差错主要是突发差错。
通信过程中产生的传输差错,是由随机差错和突发差错共同构成的.3。
误码率数据传输过程中可用误码率Pe来衡量信道数据传输的质量,误码率是指二进制码元在数据传输系统中出现差错的概率,可用下式表达:4。
差错控制差错控制是指在数据通信过程中能发现或纠正差错,将差错限制在尽可能小的允许范围内。
差错检测是通过差错控制编码来实现的;而差错纠正是通过差错控制方法来实现的。
差错控制编码差错控制编码的原理是:发送方对准备传输的数据进行抗干扰编码,即按某种算法附加上一定的冗余位,构成一个码字后再发送。
接收方收到数据后进行校验,即检查信息位和附加的冗余位之间的关系,以检查传输过程中是否有差错发生。
差错控制编码分检错码和纠错码两种,检错码是能自动发现差错的编码,纠错码是不仅能发现差错而且能自动纠正差错的编码。
衡量编码性能好坏的一个重要参数是编码效率R:其中,n表示码字的位长,k表示数据信息的位长,r表示冗余位的位长.计算机网络中常用的差错控制编码是奇偶校验码和循环冗余码。
差错控制
数据后,只等待判断信号。反馈重传纠错方式的缺点 是实时性较差。 2,前向纠错技术 工作原理:在前向纠错方式中,发送端对数据进行 校验和纠错编码,接收端收到这些编码后,根据约定 的规则进行译码。译码过程不但可以发现错误,而且 能够自动地进行纠错。在前向纠错的工作中,发送端 不需要等待接收端反馈信号,因此也就不需要专门的 反馈信道。 前向纠错方法的最大好处是不用重传出错的数据帧, 而是利用校验码在检测出错的同时还能确定出错比特 的位置,将出错比特取反即可纠正传输错误的冗余码 元比较多,效率相对而言也比较低,从而使传输通信 数据的效率大为下降,复杂运算的数据处理工作
要求;对较长的数据帧则使用循环冗余校验方法,附 加位数不会太多,而且检错能力强,其数字逻辑电路 也易于实现,是现在网络通信中进行数据帧校验的主 要方法。循环冗余校验是一种利用多项式除法进行冗 余码生成、接收方检验传输是否出错的有效方法。 练习:
1,(信源)是产生和发送信息的一端,(信宿)是接收信息的 一端。通信是在(信源)和(信宿)之间建立数据传输的 (信道)。 2,(误码率)是衡量数据传输可靠性的一个参数,它是指二进 制码元在传输系统中被传错的概率。 3,一个通信系统至少应包含3个部分:(发送设备)、(传输介 ,一个通信系统至少应包含3 质)和(接收设备) 4,数字信号调制成模拟信号常有(移幅)、(移频)、和(移 相)三种方法 5,按照信息同时传输的方向分为(单工)、(半双工分为垂直奇偶校 验、水平奇偶校验和水平垂直奇偶校验3 验、水平奇偶校验和水平垂直奇偶校验3种。 ①水平奇偶校验:是将若干字符组成一个信息块,对 该信息块的字符中对应的位分别进行奇偶校验。 ②垂直奇偶校验是以字符为单位的校验方法。例如, 传输数据为“1010001” 传输数据为“1010001”;采用偶校验时,附加位为 “1”,则发送信息变为“10100011”;采用奇校验时, ,则发送信息变为“10100011” 附加位为“ 发送信息变为“10100010” 附加位为“0”发送信息变为“10100010”。 ③水平垂直奇偶校验是把水平垂直两个方向的奇偶校 验结合起来构成的,即纵向每个字符校验一次,水平 方向每个信息块发送完后其对应位也校验一次(发送 一个校验码)。
MATLAB差错控制
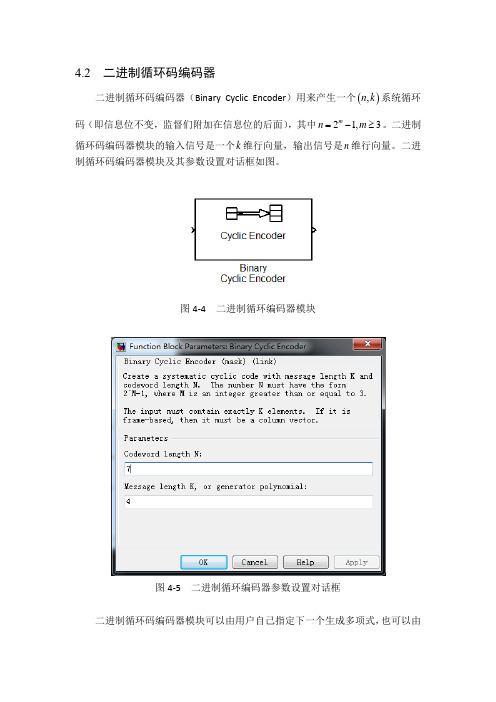
4.2 二进制循环码编码器二进制循环码编码器(Binary Cyclic Encoder )用来产生一个(),n k 系统循环码(即信息位不变,监督们附加在信息位的后面),其中21,3m n m =-≥。
二进制循环码编码器模块的输入信号是一个k 维行向量,输出信号是n 维行向量。
二进制循环码编码器模块及其参数设置对话框如图。
图4-4 二进制循环编码器模块图4-5 二进制循环编码器参数设置对话框二进制循环码编码器模块可以由用户自己指定下一个生成多项式,也可以由MATLAB 自动产生下一个生成多项式,这是通过调用MATLAB 函数cyclpoly(n,k,’min’)实现的。
二进制循环码编码器模块有两个参数。
Codeword length N (码字长度)循环编码的码字长度,它等于二进制循环码编码器产生的输出信号的长度。
Message length K,or generator polynomial (信息位长度/生成多项式)。
当本参数被设置为一个标量时,它表示信息位的长,即二进制循环码编码器输入信号的长度,这时候由MATLAB 自动产生一个生成多项式;当本参数设置为一个二进制向量时,它表示二进制循环码的生成多项式。
4.4 二进制循环码解码器二进制循环码解码器(Binary cyclic Decoder )用于对二进制系统循环码进行解码,它的输入信号是一个长度为n 的向量,其中21,3m n m =-≥根据生成多项式还原得到长度为k 的二进制序列。
二进制循环码解码器模块及其参数设置对话框如图所示。
图4-9 二进制循环码解码器参数设置对话框图4-10 二进制循环码解码器模块与二进制循环码编码器模块一样,二进制循环码解码器模块中的生成多项式既可以由用户自己指定,也可以由MATLAB自动产生。
值得注意的是,解码器中的生成多项式应该与编码器中的生成多项式保持一致。
二进制循环码解码器模块有两个参数。
Codeword length N(码字长度)循环编码的码字长度,它等于二进制循环码解码器输入信号的长度。
差错控制

3.1.4 差错控制编码原理
2.码重和码距的概念
(1)码重 在信道编码中,定义码组中非零码元的数目为码组的重量, 简称码重。 (2)码距与汉明距离 把两个码组中对应码位上具有不同二进制码元的个数定义为 两码组的距离,简称码距。 而在一种编码中,任意两个许用码组间的距离的最小值,称 为这一编码的汉明(Hamming)距离,用dmin来表示。
3.1 差错控制的基本概念
3.1.3 差错控制方式
2.前向纠错(FEC) 前向纠错(Forward Error Correcting,FEC)方式。前向纠 错系统中,发送端的信道编码器将输入数据序列按某种规 则变换成能够纠正错误的码,接收端的译码器根据编码规 律不仅可以检测出错码,而且能够确定错码的位置并自动 纠正。 这种方式的优点是不需要反馈信道,也不存在由于反复重 发而延误时间,实时性好。其缺点是要求附加的监督码较 多,传输效率低,纠错设备比检错设备复杂。
c2 = c6 ⊕ c5 ⊕ c4 c1 = c6 ⊕ c5 ⊕ c3 c = c ⊕ c ⊕ c 6 4 3 0
3.2 常用的差错控制编码
3.2.2 线性分组码及汉明码
(2)线性分组码的监督矩阵和生成矩阵
表3-5 (7,4)线性分组码的编码表
信息位 c6 c5 c4 c3 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 监督位 c2 c1 c0 0 0 0 0 1 1 1 0 1 1 1 0 1 1 0 1 0 1 0 1 1 0 0 0 信息位 c6 c5 c4 c3 1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 监督位 c2 c1 c0 1 1 1 1 0 0 0 1 0 0 0 1 0 0 1 0 1 0 1 0 0 1 1 1
第五讲 RFID系统的数据完整性

射频识别技术第五讲RFID系统数据完整性5.0 前言RFID系统是一个开放的无线系统,外界的各种干扰容易使数据传输产生错误,同时数据也容易被外界窃取,因此需要有相应的措施,使数据保持完整性和安全性。
本章内容5.1 差错控制5.2 数据传输中的防碰撞问题5.3 RFID中数据完整性的实施策略5.4 小结数据传输的完整性存在哪些问题?RFID系统中,数据传输的完整性存在两个方面问题:1、外界的各种干扰可能使数据传输产生错误;2、多个应答器同时占用信道使发送数据产生碰撞。
运用数据检验(差错检测)和防碰撞算法可分别解决这两个问题。
本章内容5.1 差错控制5.2 数据传输中的防碰撞问题5.3 RFID中数据完整性的实施策略5.4 小结差错控制是一种保证接收数据完整、准确的方法。
在数字通信中,差错控制利用编码方法对传输中产生的差错进行控制,以提高数字消息传输的准确性。
1.差错分类(1)随机错误(2)突发错误2.差错的衡量指标误码率(Bit Error Ratio,BER)是衡量在规定时间内数据传输精确性的指标。
3.差错控制的基本方式差错控制编码可以分为检错码和纠错码。
检错码能自动发现差错的编码;纠错码不仅能发现差错,而且能自动纠正差错的编码。
(1)反馈纠错(ARQ)(2)前向纠错(FEC)(3)混合纠错检错重发中,在发送端加入少量的监督码元,在接收端根据编码规则对收到的信号进行检查,当发现有错码是,即向发送端发出询问信号,要求重发。
发送端收到询问信号后,立即重发,直到信息正确接收为止。
混合纠错是ARQ和FEC的结合,设计思想是对出现的错误尽量纠正,纠正不了则通过重发来消除差错。
4.误码控制的基本原理(块码原理)为了使信源代码具有检错和纠错的能力,应当按照一定的规则在信源编码的基础上增加一些冗余码元(又称为监督码元),使这些冗余码元与被传送信息码元之间建立一定的关系。
在收信端,根据信息码元与监督码元的特定关系,可以实现检错或纠错。
差错控制的概念

差错控制的概念
差错控制呀,这可真是个超级重要的概念呢!就好像我们在生活中走路,有时候会不小心绊一下,但我们会赶紧调整步伐,不至于摔倒,这其实就是一种差错控制呀。
在通信领域,差错控制就像是一位细心的守护者。
它要确保信息在传输过程中不会出现错误,不然那可就乱套啦!想想看,如果我们发送的信息都变得乱七八糟,那还怎么交流呢?
差错控制的方法有很多呢。
比如说,它可以像一个严格的检查官,对传输的数据进行逐一核对,一旦发现有错误,马上采取措施纠正。
这就好比我们写作业,写完后要认真检查一遍,把错误都找出来改正。
还有纠错码,这可真是个神奇的东西。
它就像是给信息穿上了一层保护衣,让信息在传输过程中即使遇到一些干扰也能保持完整。
这就像我们给珍贵的物品包上一层保护膜,让它不容易受到损坏。
差错控制不是可有可无的哦,它是至关重要的呀!没有它,我们的通信世界将会变得混乱不堪。
难道不是吗?我们现在能够顺畅地打电话、上网、发送信息,都要归功于差错控制呀!
它就像一座坚固的桥梁,连接着信息的发送方和接收方,让信息能够准确无误地传递。
要是没有差错控制,那这座桥可能就会摇摇晃晃,随时都可能坍塌。
在这个信息爆炸的时代,差错控制更是不可或缺的。
我们每天都要处理大量的信息,如果这些信息都是错误的,那我们岂不是要被误导啦?所以呀,差错控制真的是太重要啦,它让我们的信息世界变得有序、可靠。
总之,差错控制是通信领域中非常关键的一部分,它确保了信息的准确性和可靠性,让我们能够安心地享受信息带来的便利。
我们真的应该好好感谢差错控制这个默默守护我们的“小天使”呀!。
第六章差错控制
第六章差错控制第六章差错控制1 差错控制的基本概念1.1 差错的特点由于通信线路上总有噪声存在,噪声和有⽤信息中的结果,就会出现差错。
噪声可分为两类,⼀类是热噪声,另⼀类是冲击噪声,热噪声引起的差错是⼀种随机差错,亦即某个码元的出错具有独⽴性,与前后码元⽆关。
冲击噪声是由短暂原因造成的,例如电机的启动、停⽌,电器设备的放弧等,冲击噪声引起的差错是成群的,其差错持续时间称为突发错的长度。
衡量信道传输性能的指标之⼀是误码率po。
po=错误接收的码元数/接收的总码元数⽬前普通电话线路中,当传输速率在600~2400bit/s时,po在之间,对于⼤多数通信系统,po在之间,⽽计算机之间的数据传输则要求误码率低于。
1.2 差错控制的基本⽅式差错控制⽅式基本上分为两类,⼀类称为“反馈纠错”,另⼀类称为“前向纠错”。
在这两类基础上⼜派⽣出⼀种称为“混合纠错”。
(1)反馈纠错这种⽅式在是发信端采⽤某种能发现⼀定程度传输差错的简单编码⽅法对所传信息进⾏编码,加⼊少量监督码元,在接收端则根据编码规则收到的编码信号进⾏检查,⼀量检测出(发现)有错码时,即向发信端发出询问的信号,要求重发。
发信端收到询问信号时,⽴即重发已发⽣传输差错的那部分发信息,直到正确收到为⽌。
所谓发现差错是指在若⼲接收码元中知道有⼀个或⼀些是错的,但不⼀定知道错误的准确位置。
图6-1给出了“差错控制”的⽰意⽅框图。
オ(2)前向纠错这种⽅式是发信端采⽤某种在解码时能纠正⼀定程度传输差错的较复杂的编码⽅法,使接收端在收到信码中不仅能发现错码,还能够纠正错码。
在图6-1中,除去虚线所框部分就是前向纠错的⽅框⽰意图。
采⽤前向纠错⽅式时,不需要反馈信道,也⽆需反复重发⽽延误传输时间,对实时传输有利,但是纠错设备⽐较复杂。
(3)混合纠错混合纠错的⽅式是:少量纠错在接收端⾃动纠正,差错较严重,超出⾃⾏纠正能⼒时,就向发信端发出询问信号,要求重发。
因此,“混合纠错”是“前向纠错”及“反馈纠错”两种⽅式的混合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.2 差错控制基本方法
差错控制方法
1、概念
香农“通信的数学理论”
利用差错控制编码来控制传
输系统的传输差错的方法。
2、分类
☐自动请求重发(ARQ:Automatic Repeat Request)方式;☐前向纠错(FEC:Forword Error Correction)方式;
☐混合纠错(HEC:Hybrid Error Correction)方式;
☐信息反馈(IRQ:Information Repeat Request)方式;
☐
纠错码
纠错码不仅能发现错误, 而且能
自动纠正错误。
如果使用纠错码进行差错控制,就可以使用前向纠错(FEC)方式和混合纠错(HEC)方式;
☐
检错码
检错码只能发现错误, 而不能纠
正错误,自动请求重发ARQ 使用的正是检错码;
☐
自动请求重发(ARQ)方式
工作过程:利用检错编码,接收端判断是否传错,并反馈给发送端,数据错误则请求重发出错的码组。
☐
前向纠错(FEC)方式
工作过程:利用纠错编码, 接收端译码器能发现错误并能准确地判断差错的位置,从而自动纠正它们。
☐
混合纠错(HEC)方式
工作过程:接收端译码器收到码组后, 首先检验传输差错的情况,如果差错在纠错能力以内,则自动
进行纠错。
如果错误超过了纠错能力,则给发送端反馈信息,请求重发出错的码组。
☐
混合纠错( HEC)方式的特点:
(1)可以降低FEC 的复杂性;
(2)
改善ARQ 的信息连贯性差,通信效率低的缺点;
(3)
HEC 方式可以使误码率达到很低,
在卫星通信中得到较多的应用。
☐
前向纠错(FEC)方式的特点:
(1)自动纠错实时性好,但译码设备复杂;
(2)
无需反馈通道, 特别适用于单点向多点同时传送的方式;
(3)纠错码需要较大的冗余度, 传输效率低;
(4)
纠错码应与信道特性相配合, 对信道的适应性差。
1、工作原理
利用检错编码,接收端能发现错误但是不能进行纠正,从而要求发送端重新发送一遍信息。
发送端接收端
无错码
有错码
2、发送端判断
接收端根据校验序列的编码规则判断是否传错,并把判断结果通过反馈通道传送给发送端。
判断结果有3种情况:
☐肯定确认——ACK;
☐否定确认——NAK;
☐超时重发:如果在规定时间内没有收到确认信号,则认为信息丢失或确认信息丢失必须重新发送;
工作原理
110101010011101001
000000
缓冲区
数据帧
信道传输
000000接收端…
…
101010101011
误码
正确
…
☐一个数据帧进入缓冲区;
☐
数据发送后,发送端等待接收端确认指令;
☐如果收到NAK 指令则重新发送缓冲区数据;
☐
直到收到ACK 指令后,清空缓冲区数据帧,进行下一数据的传输;
101010
工作原理
缓冲区
信道传输
000000
接收端
…
☐定时器
☐
发送端每发送一帧都会启动定时器,在规定时间内还没有收到应答信号。
则执行超时重发,解决信息帧丢失的问题;
…
101010101010
工作原理
缓冲区
信道传输
接收端
…
☐确认帧丢失
☐
如果发送信息无差错,而确认帧丢失,超时后发送端重发,接收端则会出现重复帧;
☐
解决办法:给数据帧添加头部序号,当收到重复帧,把该帧丢弃,并
发送一个ACK 确认,进行下一数据的传输。
…
01(帧序号)101010
01(帧序号)101010
01(帧序号)101010
连续式ARQ
四
概念及分类
☐概念:发送端维持着一个一定大小的发送窗口,位于发送窗口内的所有数据帧连续发送出去,中途不需要等待接收端的确认。
☐根据数据帧出现误码后重发机制的不同进行分类:
退回N帧ARQ
选择重发ARQ
工作原理01234567891011121314150123456789101112131415
发端
收端00W T =5
W R =1123451
2346789
工作原理
正确传输时(数据与确认帧均无差错):
☐发送端连续发送,直到收到第一帧的返回帧为止;
☐发送端存有重发表中数据的备份;
☐发送端重发表中数据先进先出;
☐接收端对每一个正确收到的数据帧返回一个ACK 帧;
☐每一个数据帧包含一个惟一序号,该序号在相应的ACK 帧中返回; ☐接收端保存一个接收序列表,它包含最后正确收到的数据帧的序号; ☐当收到相应数据帧的ACK, 发送端从重发表中删除该数据帧。
工作原理
数据帧出现差错时:
☐接收端立即返回一个相应的未正确接收的否定确认(NAK);
☐接收端同时清除出错后的所有帧,直到收到下一个正确帧才能继续正常工作;
☐发送端收到否定确认,立即执行回退重发, 从重发表中尚未确认的第一帧开始重新发送;
☐对每一个出错的数据帧,接收端都产生相应的NAK, 否则若正好NAK( N)丢失或出错,将产生死锁, 即发送端不停地发送新的帧,同时等待对第N帧的确认, 而接收端不停地清除后继的帧;
工作原理
数据帧正确, 确认帧出现差错:
ACK(N) ACK(N+1) ACK(N+2)NAK(N) NAK(N+1) ACK(N+2)
累计确认ACK(N)
N+1
NAK(N+2)
ACK(N)
NAK(N+2)
可能出现重复帧
ACK(N+1)
NAK(N+1)
or
特点
☐优点:比停等ARQ传输效率要高;
☐缺点:收端的存储器只能存放一帧信息,若正确就把它上交,若错误就将其丢弃,重新接收该帧及以后各帧,而在重发的N帧中,大部分在第一次发送时就是正确的,再次发送浪费了信道。
当N较大时,效率会下降。
概念及原理
在退回N 帧ARQ 基础上,当一个帧有错时,只发有错的这一帧,其余(N−1)个正确帧先接收存储起来,待有错帧经重发正确后,一起再发确认帧,收端将收到的帧重新排序,送给用户。
退回N 帧ARQ 收端只能存放一帧信息,如果接收端能够存放N 帧信息,传输效率可以提高,这就是选择重发ARQ 。
特点
☐优点:在自动请求重发模式中传输效率最高;
☐缺点:成本也最贵,接收端必须有足够的存储空间,以便等待有错帧经重发后获得更正,然后接收端必须把接收到的帧重新排序后送给用户。
☐由此可见,选择重传ARQ 方式的可以接收乱序帧。
谢谢。