理论力学第五章
合集下载
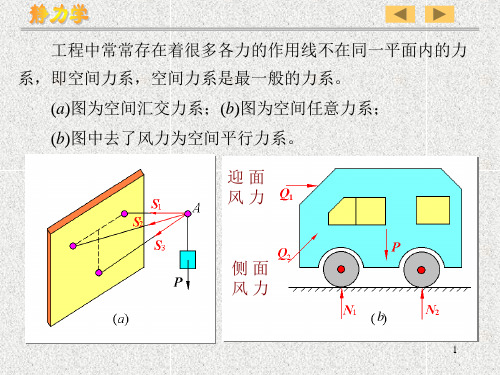
理论力学第五章
r Fi
g rri q
0
由虚功原理
P1 x1 P2 x2 F y3 0
x1
1 2
l1
sin
x2
l1 sin
1 2
l2
sin
y3 l1 cos l2 cos
P1 x1, y1 P2 x2, y2 B x3, y3
1 2
P1l1
cos
P2l1
cos
Fl1
sin
1 2
P2l2
2.理想约束
虚功:作用在质点上的力F在任意虚位移上做的功
理想约束:质点上的所有约束反力的虚功之和为零
n
r Ri
g
rr
0
i 1
引入虚位移可以消去这些约束反力 3.虚功原理
受理想约束的力学体系的平衡充要条件是所有主动力 的虚功之和等于零。
W
n
r Fi
g
rri
n
Fix xi Fiy yi Fiz zi 0
速度 s&2 r&2 r2&2 r2 sin2 &2
动能 T 1 ms&2 1 m r&2 r2&2 r2 sin2 &2
2
2
注意 Qr Fr , Q rF , Q r sin F
1 2
m
d dt
s&2 r&
s&2 r
Fr
1
2
1 2
m m
d
dt
2.稳定约束时
ri t
0 a ,a 0 T1 ,T0 0, T
T2
H T V 常量(E ) 能量积分
说明: L 不显含时间,且稳定约束条件下,系统能量守恒. 具有可加性(广延量)的运动积分称为守恒量.
理论力学(第7版)第五章 点的运动学

a 4、匀速运动: v 常数, 0, s s0 vt
运 动 规 律
[例5-1 ] 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, z=4t m。 求:点运动轨迹的曲率半径 。
解:
vx x 8 cos 4t , ax 32 sin 4t x
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
3
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
三.加速度
dv d 2r a r 2 dt dt
dv v2 a a a n a a n n n dt
17
5-3 自然法 曲率(1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
d lim| | t 0 S dS 1
由于a , an均在密切面内,全加速a必在密切面内。 度
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
(动画自然坐标轴的几何性质)
曲线在P点的密切面形成
5-3 自然法
二.点的速度
当t 0时,r MM' S
v y y 8 sin 4t , a y 32 cos 4t y
v z z 4, a z 0 z
2 2 2 2 v v x v 2 v z 80 m s , a a x a 2 a z 32m s 2 y y
运 动 规 律
[例5-1 ] 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, z=4t m。 求:点运动轨迹的曲率半径 。
解:
vx x 8 cos 4t , ax 32 sin 4t x
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
3
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
三.加速度
dv d 2r a r 2 dt dt
dv v2 a a a n a a n n n dt
17
5-3 自然法 曲率(1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
d lim| | t 0 S dS 1
由于a , an均在密切面内,全加速a必在密切面内。 度
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
(动画自然坐标轴的几何性质)
曲线在P点的密切面形成
5-3 自然法
二.点的速度
当t 0时,r MM' S
v y y 8 sin 4t , a y 32 cos 4t y
v z z 4, a z 0 z
2 2 2 2 v v x v 2 v z 80 m s , a a x a 2 a z 32m s 2 y y
理论力学第五章
30o
第一种情况: 第一种情况:
摩擦力阻止其向下运动
∑F
x
=0
Q min cos α + Fm − G sin α = 0
− Q min sin α + N − G cos α = 0
∑F
利用
y
=0
Fm = f s N
Q min sin α − f s cos α =G = 135.31 N cos α + f s sin α
[例4] 例
宽a,高b的矩形柜放置 , 的矩形柜放置 a 在水平面上,柜重 ,重心C 在水平面上,柜重P,重心 在其几何中心,柜与地面间 在其几何中心, F h P C 的静摩擦因数是 fs,在柜的 b 侧面施加水平向右的力F, 侧面施加水平向右的力 , 求柜发生运动时所需推力F 求柜发生运动时所需推力 的最小值。 的最小值。
再以整体为对象, 再以整体为对象,有平衡方程 整体为对象
∑X = 0
FAx − FBx = 0
FAx = FBx = 72.17 N
下面判断系统是否处于静平衡 脚端A 极限静摩擦力分别为 脚端 与B 的极限静摩擦力分别为 :
r y
C
Fm A = f s A FAy = 75 N
r G
Fm B = f s B FBy = 75 N
解:
取矩形柜为研究对象,受力分析如图。 1 .假设不翻倒但即将滑动,考虑临界平衡。
y
列平衡方程
∑F = 0,
x
F − FA − FB = 0
F P
C
∑F
FB
x
y
= 0,
FNA + FNB − P = 0
FB = fs × FNB
第一种情况: 第一种情况:
摩擦力阻止其向下运动
∑F
x
=0
Q min cos α + Fm − G sin α = 0
− Q min sin α + N − G cos α = 0
∑F
利用
y
=0
Fm = f s N
Q min sin α − f s cos α =G = 135.31 N cos α + f s sin α
[例4] 例
宽a,高b的矩形柜放置 , 的矩形柜放置 a 在水平面上,柜重 ,重心C 在水平面上,柜重P,重心 在其几何中心,柜与地面间 在其几何中心, F h P C 的静摩擦因数是 fs,在柜的 b 侧面施加水平向右的力F, 侧面施加水平向右的力 , 求柜发生运动时所需推力F 求柜发生运动时所需推力 的最小值。 的最小值。
再以整体为对象, 再以整体为对象,有平衡方程 整体为对象
∑X = 0
FAx − FBx = 0
FAx = FBx = 72.17 N
下面判断系统是否处于静平衡 脚端A 极限静摩擦力分别为 脚端 与B 的极限静摩擦力分别为 :
r y
C
Fm A = f s A FAy = 75 N
r G
Fm B = f s B FBy = 75 N
解:
取矩形柜为研究对象,受力分析如图。 1 .假设不翻倒但即将滑动,考虑临界平衡。
y
列平衡方程
∑F = 0,
x
F − FA − FB = 0
F P
C
∑F
FB
x
y
= 0,
FNA + FNB − P = 0
FB = fs × FNB
理论力学第五章 摩擦(Y)
0 Fs Fs,max
——平衡
0 f
f Fs Fs ,max ——临界平衡状态 摩擦角 f —— 物体处于临界平衡状态时全反力与
法线之间的夹角。
tan f
Fs ,max FN
f s FN fs FN
摩擦角的正切等于静滑动摩擦系数——几何意义。
当物体平衡时(包括平衡的临界状态)全约束反力 的作用线一定在摩擦角之内
摩擦轮传动——将左边轴的转动传给右边的轴
摩擦的分类:
摩擦
滑动摩擦
滚动摩擦
静滑动摩擦 ——仅有相对运动趋势 动滑动摩擦 ——已有相对运动 静滚动摩擦 动滚动摩擦
干摩擦 ——由于接触表面之间没有液体时产生的摩擦。 湿摩擦 ——由于物体接触面之间有液体。
摩擦
一、滑动摩擦
研究滑动摩擦规律的实验:
MB 0
l sin 30 0 M P cos 30 0 FND l cos 30 0 0 FSD 2
3 P 3l
(1 FSD
FSD f s FND
3 2 3 M M min Pl 8
(1)当M较大时,BD杆逆时针转动。 分别以OA、 BD杆为研究对象, 画受力图。 l 0 FND l cos 30 P 0 对于OA杆: M O 0 2
Y 0
Fs,max f s FN
(库仑摩擦定律)
(2)最大静摩擦力的方向:沿接触处的公切线,与相对 滑动趋势反向;
Fs,max f s FN f s ——静滑动摩擦系数——静摩擦系数
与两接触物体表面情况(粗糙度,干湿度,温度等) 和材料有关,与两物体接触面的面积无关。
理论力学-第五章
PS f'ct(fg)Q ct(3g 0.4 0 15 )200 50(N 0)0
精品文档
31
[练习1] 已知:Q=10N, f '动 =0.1 f 静 =0.2 求:P=1 N; 2N, 3N 时摩擦力F?
解: F m afx 静 N 0 .2 1 0 2 N
P 1 N 时 ,由 X 0 ,F P 1 N (没动,F 等于外力)
精品文档
7
三、摩擦角:
①定义:当摩擦力达到最大值Fmax 时其全反力
与法线的夹角 m 叫做摩擦角。
②计算:
翻
页
tgmFN maxfN Nf
请 看
动
画
精品文档
8
精品文档
9
四、自锁
①定义:当物体依靠接触面间的相互作用的摩擦 力 与正
压力(即全反力),自己把自己卡 紧,不会松开 (无论外力多大),这种现象称为自锁。
N'=N
d
M N
'
M dN 'dN
dd
从图中看出,滚阻力偶M的力偶臂正是d(滚阻系
数),所以,d 具有长度量纲。
由于滚阻系数很小,所以在工程中大多数情况下滚阻力
偶不计,即滚动摩擦忽略不计。
精品文档
23
第四章 《摩擦》习题课
本章小结 一、概念: 1、摩擦力----是一种切向约束反力,方向总是
与物体运动趋势方向相反。
由 X 0 ,R co ) s R 1 c ( o 0
由二力平衡条 :R件 R1
, 2 又tg0.1f , tg10.15043' 211026' (极限状)态 即当211026'时能自锁
精品文档
精品文档
31
[练习1] 已知:Q=10N, f '动 =0.1 f 静 =0.2 求:P=1 N; 2N, 3N 时摩擦力F?
解: F m afx 静 N 0 .2 1 0 2 N
P 1 N 时 ,由 X 0 ,F P 1 N (没动,F 等于外力)
精品文档
7
三、摩擦角:
①定义:当摩擦力达到最大值Fmax 时其全反力
与法线的夹角 m 叫做摩擦角。
②计算:
翻
页
tgmFN maxfN Nf
请 看
动
画
精品文档
8
精品文档
9
四、自锁
①定义:当物体依靠接触面间的相互作用的摩擦 力 与正
压力(即全反力),自己把自己卡 紧,不会松开 (无论外力多大),这种现象称为自锁。
N'=N
d
M N
'
M dN 'dN
dd
从图中看出,滚阻力偶M的力偶臂正是d(滚阻系
数),所以,d 具有长度量纲。
由于滚阻系数很小,所以在工程中大多数情况下滚阻力
偶不计,即滚动摩擦忽略不计。
精品文档
23
第四章 《摩擦》习题课
本章小结 一、概念: 1、摩擦力----是一种切向约束反力,方向总是
与物体运动趋势方向相反。
由 X 0 ,R co ) s R 1 c ( o 0
由二力平衡条 :R件 R1
, 2 又tg0.1f , tg10.15043' 211026' (极限状)态 即当211026'时能自锁
精品文档
理论力学第五章
(1) (2)
FS1 f s FN 1 (3)
解得: F1
F 设物块有下滑趋势时,推力为, 2 画物块受力图:
Fx 0,
Fy 0,
sin f s cos P cos f s sin
F2 cos P sin Fs 2 0 F2 sin P cos FN 2 0
r (b f s c) f s Ra
例5-5 已知:均质木箱重 求: (1)当D处拉力
o P 5kN , f s 0.4 , h 2a 2m , 30 ;
F 1kN 时,木箱是否平衡?
(2)能保持木箱平衡的最大拉力.
解: (1)取木箱,设其处于平衡状态.
Fx 0
求:拉动拖车最小牵引力 F( F 平行于斜坡).
解: 取整体
Fx 0
Fy 0
F FAs FBs P sin 0 FAN FBN P cos 0
M A MB 0
(1)
(2)
M B 0
FAN (a b) Fh P cos b P sin H
共有 FD , FC , F , FND 四个未知数
在 f D 0.3 时,解得 F 4.62 N
D 即在 f D 0.3 时, 处不会先滑动.
当 f D 0.15 时,解得 FND 172.4N
FD F C f D FND 25.86N
C 处无滑动
Fmin 47.81N .
第五章
摩 擦
摩擦
滑动摩擦 滚动摩擦 干摩擦 湿摩擦
静滑动摩擦 动滑动摩擦 静滚动摩擦 动滚动摩擦
理论力学第五章
6
例1
如图所示起重杆A端用球形铰链固定在地面上,B端用绳 CB和DB拉住,连线CD平行于 x 轴。已知:CE=EB=DE,
=30,CDB平面与水平面的夹角 EBF=30 ,重物
P=10 kN,试求起重杆所受的压力和绳的拉力。
7
解: 取节点B 为研究对象,受力分 析如图。由空间汇交力系的平 衡方程有:
通过O点作任一轴Z,则:
mz (F )mz (Fxy )2OA'B'
由几何关系: OABcosg OA'B' 所以: 2OABcosg 2OA'B'
即: mO (F ) cosg mz (F )
[mO (F )]z mz (F )
定理:力对点的矩矢在通过该点的任意轴上的投影等于这力
对于该轴的矩。这就是力对点之矩与对通过该点轴之矩的关系18。
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0
还有四矩式,五矩式和六矩式, 同时各有一定限制条件。
Z 0,mz (F )0
29
空间汇交力系的平衡方程为:
X 0 Y 0 Z 0
因为各力线都汇交于一点,各轴都通过 该点,故各力矩方程都成为了恒等式。
g
O
q
Fxy
大小: F F
作用点:在物体的哪点就是哪点 方向:
由、、g三个方向角确定
2
2、一次投影法(直接投影法) 由图可知:
X Fcos, Y Fcos , Z Fcosg
3
3、力沿坐标轴分解:
若以 Fx ,Fy ,Fz 表示力沿直角
理论力学 第五章 桁架和摩擦
理想桁架 工程实际中计算桁架受力情况时,常 作如下简化: (1) 构成桁架的杆件都是直杆; (2) 杆件两端都用光滑铰链连接; (3) 所有外力(主动力及支座反力) 都作用在节点上; (4) 杆件自重略去不计。
这种桁架称为理想桁架。
平面桁架各杆内力
1.节点法 2.截面法
汇交力系 平面一般力系
已知平面桁架尺寸、载荷。求:各杆内力。
3 因 0 Fs Fmax ,问题的解有时在一个范围内.
考虑摩擦的平衡问题
(1)判断物体是否平衡,并求滑动摩擦力。
先假设物体处于平衡,根据平衡方程求出物体平衡时需 要的摩擦力以及相应接触面间的正压力。再根据摩擦定 律求出相应于正压力的最大静摩擦力并与之比较。若满
足F≤Fmax这一关系,说明物体接触面能提供足够的摩擦
当仅有滑动趋势时,产生的摩擦力,称为静滑动摩擦力
静滑动摩擦力性质
1)静滑动摩擦力FS 的方向与滑动趋势相反,大小由平衡
条件确定;
0≤FS ≤Fmax (物体平衡范围)
2)只有当物体处于将动未动的平衡临界状态时,静滑动摩
擦力FS 达到最大值,即 FS =Fmax=f FN
f — 静滑动摩擦系数;
FN— 法向反力(一般也由平衡条件决定)。
摩擦角和自锁现象
1 摩擦角
FRA ---全约束力
物体处于临界平衡状态时,全约束 力和法线间的夹角---摩擦角
tan f
Fmax FN
fs FN FN
fs
全约束力和法线间的夹角的正切等于静 滑动摩擦系数.
摩擦锥
0 f
2 自锁现象
摩擦自锁的实例
1.粗糙斜面。当 a<m时,
不论W多大,物块A均保持 平衡--摩擦自锁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刚体做平面平行运动时,刚体中不在同一 直线上的任意三点到平面的距离相等,存 在三个约束条件,故刚体平面平行运动的 自由度为3
• 刚体的定点转动
若刚体上只有一个点固定不动,整个刚 体围绕此点转动,则此刚体做定点转动
刚体定点转动时,由于固 定点的3个坐标已经固定, 只剩下三个可以独立变化 的坐标变量,刚体定点转 动的故自由度为3
dT dW
• 三个定理所对应的守恒
动量守恒定律:刚体不受外力作用,或 外力相互抵消时,刚体的总动量守恒。 在某一方向力的分量为零,则在该方向 的动量分量守恒。
角动量守恒定律:刚体不受外力矩作用, 或外力矩相互抵消时,刚体的总角动量 动量守恒。在某一方向力矩的分量为零, 则在该方向的角动量分量守恒。
刚体做定轴转动时,刚体中的点(除转轴 上的点外)绕转轴做圆周运动,此时描述 刚体的运动只需要一个坐标变量,故刚体 绕定轴转动的自由度为1(描述刚体的转 动)
• 刚体的平面平行运动
若刚体内任意一点都平行于一固定平面 而运动,则此刚体做平面平行运动,刚 体中垂直于固定平面的直线上各点,其 运动状态完全相同,任何一个与固定平 面平行的刚体截面,其运动都可用来恰 当地代表刚体的运动
机械能守恒定律:作用于刚体的外力为 保守力时,刚体的总机械能守恒。刚体 只发生动能和势能的相互转换。
§5.4 刚体的定轴转动
刚体定轴转动的自由度为1
设量刚为体绕,转则轴角(速z轴度)为转:动r 的角&kr度变kr
刚体定轴转动的基本方程
质心定理:
m
d2rc dt 2
F (e)
F
FA
FB
刚体平动时的 动能
T
1 2
mvc2
1 2
mv2
刚体做定轴转动:设转轴为z轴,则
T
1 r
2
r L
1 2
J zz
2
1 2
I
2
其中 I Jzz x2 y2 dm r2dm
刚体平面平行运动
T
1 2
mvc2
1 2
I c 2
Ic 通过质心的转轴的转动动量
§5.3 刚体的动力学方程
• 刚体运动的动量定理
r 代表 距离转轴的垂直距离
刚体定点转动时的惯性是以张量 J 来度 量,刚体绕轴转动时的惯性则以转动惯 量 I 来度量,前者是张量,后者是标量
常见几何体的 转动惯量
I mR2 / 2
I 3mR2 / 2
(三)刚体的动能
• 在刚体中各质点与质心之间的距离恒定 不变,则刚体相对于质心的运动只可能 是围绕质点的转动,由此柯尼希定理变 为:
动量定理:
dP dt
N i1
Fi
F (e)
质心定理:
m
d2rc dt 2
F (e)
冲量定理:
P F(e)t I
• 刚体运动的角动量定理
对某一固定点的角动量定理:
d
dt
L
N i1
ri Fi
M
对质心的角动量定理:
d
dt
Lc
N i1
ri Fi M c
• 刚体运动的动能定理 刚体内任意两点间无相对位移,内力 不做功,外力对刚体所做的功等于刚 体动能的变化
刚体的平面平行运动可以看成为两种运 动的合成,即随刚体(或与之刚性联结) 的基点的平动,和绕通过基点并与运动 平面垂直的轴的转动!(通常取质心作 为基点)
三个坐标参量: xc , yc ,
质心的运动由质心定理确定;转动则由 转轴方向的角动量定理求解!
设质心的运动平面为 xy 平面,过质心 的转轴沿 z 方向,则由质心定理可得
• 例题:质量为M,半径为r的均质圆柱体 放在粗糙水平面上,柱的外端绕有轻绳 ,绳子跨过一个很轻的滑轮,并悬挂一 个质量m的物体。圆柱体做纯滚动,并 且圆柱体与滑轮间的绳子是水平的。求 绳子的张力T。
作业题
• 课后习题第五章 10,17, 21
角动量定理:
d dt
L
M
MA
MB
角动量方程的 z 分量方程为
I
d
dt
I
d2 dt 2
Mz
• 例题:一个质量m,长度L的细棒,绕着O 点在竖直平面内转动。棒的一端固定着 质量为M的质点。求:棒从水平位置静 止下落到最低点时候的角速度。
§5.5 刚体的平面平行运动
刚体的平面平行运动自由度为3
任意点的速度为
vi
ri
代入上面的式子,得角动量为
L
miri ri
mi ri2 ri ri
i
i
A (B C) B(C • A) C( A • B)
对于一固定坐标系有
ri
xi
i
ii
yj j
j
j
zk
k
kk
将上述两式代入角动量的表达式可得
L Lii Lj j Lkk
刚体平动时,刚体上各点的运动情况相 同,具有相同的速度和加速度,因此刚 体上任何一个质点的运动都可以代表刚 体的运动,故刚体平动的自由度为3(等 价于质点运动,3个坐标描述质心位置)
平动既可以是直线运动,也可以是曲线运动
• 刚体的定轴转动
刚体绕一固定轴线转动,称为刚体的定 轴转动,刚体在运动过程中如果有两点 固定不动,那么刚体的运动必然是定轴 转动,两固定点的连线就是转动轴(转 轴上的点都是固定不动的,其他的点则 围绕转轴做圆周运动)
Lz
J
zx
J xy J yy Jzy
r L
J
r
J xz x J yz y J zz z
J矩阵的每个分量均构成一个二阶张量, 称为刚体的惯量张量,J 矩阵称为惯量矩阵
惯量矩阵的对角元素
J J
xx yy
y2 z2 dm z2 x2 dm
J
zz
x2 y2 dm
J yx
i
mi xi yi
xydm
则角动量表达式可以写为
L J xx x J xyy J xz z i
J yx x J yyy J yz z j
J zx x J zyy J zz z k
采用矩阵表示,则角动量可以写为
Lx J xx
L Ly J yx
刚体的动能 = 刚体随质心运动的平动动能 + 刚体ห้องสมุดไป่ตู้质心转动的转动动能
刚体绕O点转动的动能
To
1 2
mi vi 2
1 2
mivi vi
To
1 2
mivi
ri
1
2
ri mivi
To
1 r
2
r L
1 r
2
J
r
1 2
(
J
2
xx x
J
yy
2 y
J
2
zz z
2J yzyz 2J zxzx 2J xyxy )
第五章:刚体力学
§5.1 刚体的运动
• 刚体、刚体运动及自由度
任何物体都可以看成是质点组,如果其中任 何两个质点之间的距离始终保持不变,这样 的物体(质点组)称作刚体
对于大多数固态物体来说,如果在运动过程 中,其大小和形变很小,即使受到拉伸或挤 压,变形也很小,则都可以近似为刚体
• 刚体的平动
在刚体中任意选定一条直线,如果刚体 运动时此直线始终保持平行,则这种运 动称为刚体的平动
刚体的内力不做功,当作用在刚体上的 外力是保守力时,刚体的总机械能守恒
T
V
1 2
mvc
2
1 2
I 2
V
E
讲解例题5.8
• 例题:质量m,半径R的匀质实心圆柱体 在倾角为 的斜面上作纯滚动。其所受 到的摩擦力大小为多少?圆柱体从静止 开始沿斜面滚下,其质心下降的垂直距 离为h时,这时质心的速度为多大?
m
d2 dt 2
rc
F
或
mmyxcc
Fx Fy
在质心坐标系中,刚体对过质心的轴做 定轴转动的角动量为
Lz I
则对质心轴的角动量定理的方程为:
d dt
Lz
I
d
dt
I
d2 dt 2
I&&
Mz
记
则
I M z
I M z
I 为刚体对过质心的转轴的转动惯量
为刚体转动时的角加速度
M z 为诸外力对质心的力矩之和的z分量
刚体绕 l 轴转动的角动量(选l 轴作为坐标 z 轴)
Ll
LeleJl eel l L
el
J
r
Ll 0
0
1
J xx J yx
J zx
J zzr Ir
J xy J yy J zy
J J
xz yz
0 0
r
J zz 1
• 转动惯量 I
I x2 y2 dm r2dm
引
J
xx
mi yi2 zi2
y2 z2 dm
入
记 号
J
yy
J
zz
i
mi
i
mi
i
zi2 xi2 xi2 yi2
z2 x2 dm x2 y2 dm
J
yz
J zy
mi yi zi yzdm
J
zx
J xz
i
mi zi xi
zxdm
i
J
xy
0
v
vA
a aA
定轴转动,取 基点A位于转 轴,则
vvaA0,arrA''
0
r'
平面平 行运动
v a
vA aA
r' r'