有限元作业
有限元大作业
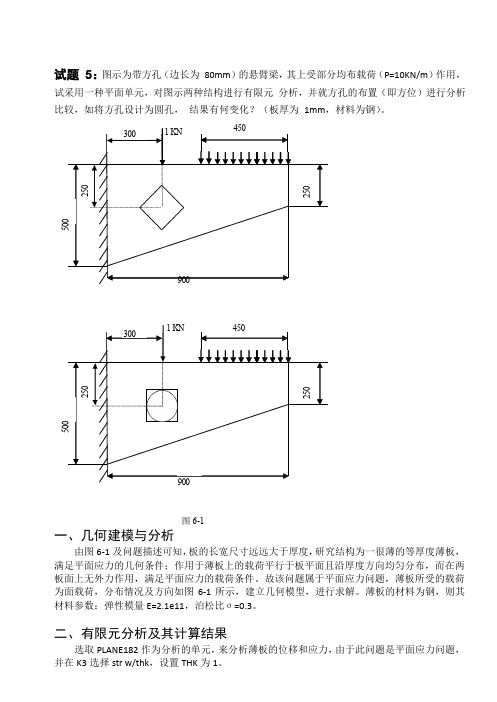
250250试题 5:图示为带方孔(边长为 80mm )的悬臂梁,其上受部分均布载荷(P=10KN/m )作用,试采用一种平面单元,对图示两种结构进行有限元分析,并就方孔的布置(即方位)进行分析比较,如将方孔设计为圆孔,结果有何变化?(板厚为 1mm ,材料为钢)。
3001KN9003001KN图6-1一、几何建模与分析由图6-1及问题描述可知,板的长宽尺寸远远大于厚度,研究结构为一很薄的等厚度薄板,满足平面应力的几何条件;作用于薄板上的载荷平行于板平面且沿厚度方向均匀分布,而在两板面上无外力作用,满足平面应力的载荷条件。
故该问题属于平面应力问题,薄板所受的载荷为面载荷,分布情况及方向如图6-1所示,建立几何模型,进行求解。
薄板的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3。
二、有限元分析及其计算结果选取PLANE182作为分析的单元,来分析薄板的位移和应力,由于此问题是平面应力问题,并在K3选择str w/thk ,设置THK 为1。
1)方孔竖直制,划分方式采用自由方式,划分后网格的模型如图6-2所示。
计算得到的位移和应力分布如图6-3所示。
图6-2 方孔竖直的网格划分图6-3 位移及应力分布云图2)方孔正直制,划分方式采用自由方式,划分后网格的模型如图6-4所示。
计算得到的位移和应力分布如图6-5所示。
图6-4 方孔正直的网格划分图6-5 位移及应力分布云图3)圆孔按图6-1所示模型进行建模。
并用PLANE182单元进行划分网格,网格大小采用全局网格控制,划分方式采用自由方式,划分后网格的模型如图6-6所示。
计算得到的位移和应力分布如图6-7所示。
图6-4 方孔正直的网格划分图6-5 位移及应力分布云图根据以上的模型分析的位移和应力图,可以得出方孔竖直、方孔正直、圆孔的最大最小位移应力的分布如表6-1所示。
三、比较与分析1)方孔竖直与方孔正直的比较,发现方孔正直的位移变形较小,应力相差不大2)圆孔与方孔比较,发现圆孔的位移变性最小,应力也最小,故可以得出圆孔的布置结构对整体布置的效果最好。
现代设计方法(关于有限元)作业
《现代设计方法》作业关于有限元法的研究学院:机械工程学院专业:机械制造及其自动化0.有限元法有限元法分析起源于50年代初杆系结构矩阵的分析。
随后,Clough于1960年第一次提出了“有限元法”的概念。
其基本思想是利用结构离散化的概念,将连续介质体或复杂结构体划分成许多有限大小的子区域的集合体,每一个子区域称为单元(或元素),单元的集合称为网格,实际的连续介质体(或结构体)可以看成是这些单元在它们的节点上相互连接而组成的等效集合体;通过对每个单元力学特性的分析,再将各个单元的特性矩阵组集成可以建立整体结构的力学方程式,即力学计算模型;按照所选用计算程序的要求,输入所需的数据和信息,运用计算机进行求解。
当前,有限元方法/理论已经发展的相当成熟和完善,而计算机技术的不断革新,又在很大程度上推进了有限元法分析在工程技术领域的应用。
然而,如此快速地推广和应用使得人们很容易忽视一个前提,即有限元分析软件提供的计算结果是否可靠、满足使用精度的前提,是合理地使用软件和专业的工程分析。
有限元法分析一般包括四个步骤:物理模型的简化、数学模型的程序化、计算模型的数值化和计算结果的分析。
每一个步骤在操作过程中都或多或少地引入了误差,这些误差的累积最终可能会对计算结果造成灾难性的影响,进而蒙蔽我们的认识和判断。
1.受内压空心圆筒的轴对称有限元分析例图1.1所示为一无限长的受内压的轴对称圆筒,该圆筒置于内径为120mm的刚性圆孔中,试求圆筒内径处的位移。
结构的材料参数为:200=,0.3E GPaμ=。
图1 结构图对该问题进行有限元分析的过程如下。
(1)结构的离散化与编号由于该圆筒为无限长,取出中间一段(20mm高),采用两个三角形轴对称单元,如图1.2所示。
对该系统进行离散,单元编号及结点编号如图1.3所示,有关结点和单元的信息见表1.1。
图1.2 有限元模型图1.3 节点位移编号及单元编号表1.1 单元编号及结点编号单元编号结 点 编 号 ①②1 2 3 2 3 4结构的结点位移列阵为11223344[]T r r r r u w u w u w u w δ= (1.1) 结构的结点外载列阵12[000000]T r r F F F = (1.2)1r F 和2r F 为由内压作用而等效在结点1和结点2上的载荷,其大小为1122240202//502622r r r h p F N F N ππ-⨯⨯⨯==== (1. 3) 约束的支反力矩阵123344[00T z z r z r z R R R R R R R = ] (1.4)其中1z R 和2z R 为结点1和结点2在Z 方向的约束支反力,(3r R ,3z R )和(4r R ,4z R )为结点3和结点4在r 方向和Z 方向的约束支反力。
有限元大作业

1.推导有限元计算格式,理解有限元原理:建立图示受拉直杆在自重(设单位长度重度为q ,截面积为A )和外力P 作用下的拉伸问题的微分方程,并分别利用不同的原理(变分求极值(最小势能或虚功原理)、加权残值法)推导有限元计算格式(取两个单元)。
手工求出端点的位移(自己给定参数值)。
设杆长为L ,截面面积为A(x),弹性模数为E,单位长重量q ,受拉杆x 处的位移为u(x)。
取微元dx 的力平衡,建立受拉杆位移所满足的微分方程()du x dx ε=,()du x E E dxσε== dx 上下截面内力与微元自重相等得()*()()*()A x dx x dx A x x dx qdx σσ++-+=-(()())dA x x q dxσ∴=- (())d duEA x q dx dx=- 0x L << ()0u x = 0x =()duEA x p dx= x L = 得解析解:2()2q x P u Lx x EA EA=-+将其分为两个单元,节点为1,2,3,得22382qL PL u EA EA=+232qL PL u EA EA=+有限元法:1)位移函数01u α= 2111u u l α-=得1211(1)x x u u u l l =-+ 令11(1)x N l =-21x N l = 11122122u u N u N u N N u⎧⎫⎪⎪⎡⎤=+=⎨⎬⎣⎦⎪⎪⎩⎭{}1u N d ⎡⎤=⎣⎦ 2)应变、应力表达{}{}111211du dN d d dx dx l l ε⎡⎤⎡⎤===-⎢⎥⎣⎦⎣⎦{}1B d ε⎡⎤=⎣⎦ {}1E E B d σε⎡⎤==⎣⎦ {}1S d σ⎡⎤=⎣⎦3)势能表示{}{}(){}{}(){}{}{}{}{}1111''112211''121112210111111111111111121221222T V ll T T T T T U W D dV F u F u qdx u u d B E d Adx F u F u ql EA EA ql l l d d d F d EA EA ql l l εε⎡⎤=-=-+-⎣⎦+⎡⎤=-+-⎣⎦⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎢⎥⎣⎦∏⎰⎰⎰4)单元平衡方程 a)最小势能原理110u ∂=∂∏120u ∂=∂∏111111212112112ql F u AE l u ql F ⎧⎫-⎪⎪⎧⎫⎡⎤-⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥-⎣⎦⎪⎪⎪⎪⎩⎭+⎪⎪⎩⎭b)虚位移原理{}(){}(){}TeTdd F qdx d δδδεσΩ+=Ω⎰⎰{}{}1B d σεδ⎡⎤=⎣⎦ {}1E E B d σεδ⎡⎤==⎣⎦{}(){}{}(){}111111TTT l d F d B E B d Adxδδ⎡⎤=⎣⎦⎰ 由虚位移任意性得,{}{}1111T lF B E B Adxd ⎡⎤=⎣⎦⎰ 积分得111111212112112ql F u AE l u ql F ⎧⎫-⎪⎪⎧⎫⎡⎤-⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥-⎣⎦⎪⎪⎪⎪⎩⎭+⎪⎪⎩⎭ 记为{}{}111k d F ⎡⎤=⎣⎦ 同理222212323112112ql F u AE l u ql F ⎧⎫-⎪⎪⎧⎫⎡⎤-⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥-⎣⎦⎪⎪⎪⎪⎩⎭+⎪⎪⎩⎭{}{}222k d F ⎡⎤=⎣⎦ {}{}ei i eF R =∑ 12220F F += 23F P =11111112211223222022202EAEAql F l l u ql ql EA EA EA EA u l l l l u ql EAEA P l l ⎡⎤⎧⎫-⎢⎥+⎪⎪⎢⎥⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪⎢-+-⎥=+⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎩⎭⎪⎪+⎢⎥⎪⎪--⎢⎥⎩⎭⎣⎦可得:22382qL PLu EA EA=+232qL PL u EA EA=+与解析解结果一致。
有限元作业整理版
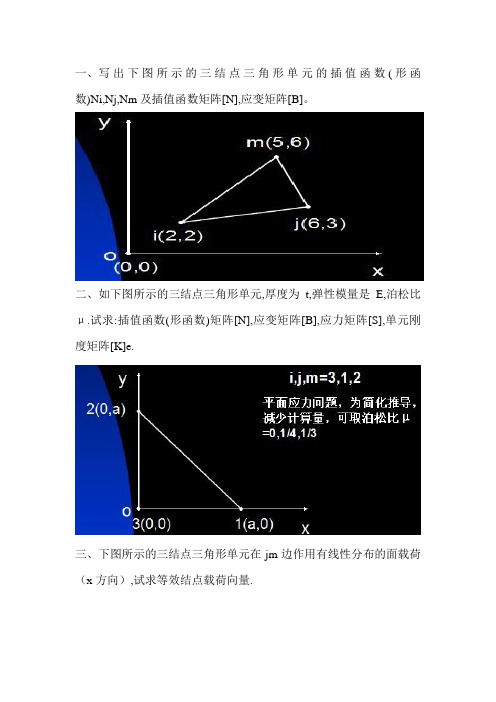
一、写出下图所示的三结点三角形单元的插值函数(形函数)Ni,Nj,Nm及插值函数矩阵[N],应变矩阵[B]。
二、如下图所示的三结点三角形单元,厚度为t,弹性模量是E,泊松比μ.试求:插值函数(形函数)矩阵[N],应变矩阵[B],应力矩阵[S],单元刚度矩阵[K]e.
三、下图所示的三结点三角形单元在jm边作用有线性分布的面载荷(x方向),试求等效结点载荷向量.
四、如下图所示,一正方形平板,厚度为t,边长为a,弹性模量E,泊松比μ.划分为两个三角形单元.求:1,3点的位移.
五、下图所示矩形板,分成四个三结点三角形单元.要求:
(1)写出由单元刚度矩阵组装总体刚度矩阵的表达式;
(2)如1234就是一个矩形单元,试求此单元的单元刚度矩阵.。
有限元分析大作业
有限元大作业一题目要求:图1所示为一悬臂梁,在端部承受载荷,材料弹性模量为E,泊松比为1/3,悬臂梁的厚度(板厚)为t,若该粱被划分为两个单元,单元和节点编号如图所示,试按平面应力问题计算各个节点位移计支反力。
一、单元划分1.计算简图及单元划分如下所示:2.进行节点及单元编号节点i j m单元① 2 3 4② 3 2 13.节点坐标值节点号1 2 3 4坐标值X 2 2 0 0Y 1 0 1 0二、计算单元刚度矩阵1、计算每个单元面积△以及i b ,i c (m j i i ,,=) ①②单元的面积相等,即12121=⨯⨯=∆ 单元①的i b ,i c⎩⎨⎧=--==-=0)(1m j i m j i y x c y y b ⎩⎨⎧=--==-=2)(0i m ji m j x x c y y b ⎩⎨⎧-=--=-=-=2)(1j i mj i m y x c y y b 对平面应力问题,其表达式为[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+-+-+-+∆-=s r s r sr s r s r s r s r s r b b uc c cb u b uc b c u c ub c c u b b u Et Krs 21212121)1(42 然后对单元①求解单元刚度子矩阵2==i r 2==i s []⎥⎦⎤⎢⎣⎡=3/1001329)1(22Et K 2==i r 3==j s []⎥⎦⎤⎢⎣⎡=03/23/20329)1(23Et K2==i r 4==m s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)1(24Et K 3==j r 3==j s []⎥⎦⎤⎢⎣⎡=4003/4329)1(33Et K 3==j r 2==i s []⎥⎦⎤⎢⎣⎡=03/23/20329)1(32Et K 3==j r 4==m s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)1(34Et K 4==m r 4==m s []⎥⎦⎤⎢⎣⎡=3/133/43/43/7329)1(44Et K 4==m r 2==i s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)1(42Et K 4==m r 3==j s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)1(43Et K由子矩阵[]e rs K 合成单元刚度矩阵[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------------=3/133/443/23/13/23/43/73/23/43/2143/24003/23/23/403/43/203/13/203/23/103/213/2001329)1(Et K将单元①的单元刚度矩阵补零升阶变为单元刚度矩阵,其在总体刚度矩阵中的位置为:节点号→单元②的i b ,i c⎩⎨⎧=--=-=-=0)(1m j im j i y x c y y b ⎩⎨⎧-=--==-=2)(0i m ji m j x x c y y b ⎩⎨⎧=--==-=2)(1j i mj i m y x c y y b 然后对单元 求解单元刚度子矩阵:3==i r 3==i s []⎥⎦⎤⎢⎣⎡=3/1001329)2(33Et K 3==i r 2==j s []⎥⎦⎤⎢⎣⎡=03/23/20329)2(32Et K 3==i r 1==m s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)2(31Et K 1 2 3 412[])1(22K[])1(23K[])1(24K3[])1(32K[])1(33K[])1(34K4[])1(42K[])1(43K[])1(44K2==j r 2==j s []⎥⎦⎤⎢⎣⎡=4003/4329)2(22Et K 2==j r 3==i s []⎥⎦⎤⎢⎣⎡=03/23/20329)2(23Et K 2==j r 1==m s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)2(21Et K 1==m r 1==m s []⎥⎦⎤⎢⎣⎡=3/133/43/43/7329)2(11Et K 1==m r 3==i s []⎥⎦⎤⎢⎣⎡----=3/13/23/21329)2(13Et K 1==m r 2==j s []⎥⎦⎤⎢⎣⎡----=43/23/23/4329)2(12Et K 由子矩阵[]e rs K 合成单元刚度矩阵[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------------=3/133/443/23/13/23/43/73/23/43/2143/24003/23/23/403/43/203/13/203/23/103/213/2001329)2(Et K将单元②的单元刚度矩阵补零升阶变为单元贡献矩阵,其在总体刚度矩阵中的位置为:节点号→1 2 3 41 [])2(11K[])2(12K[])2(13K2 [])2(21K[])2(22K[])2(23K3 [])2(31K [])2(32K [])2(33K 4三、计算总体刚度矩阵总体刚度矩阵是由各单元的贡献矩阵迭加而成)2()1(][][][][K K K K e +==∑四、进行节点约束处理根据节点约束情况,在总刚矩阵中可采用划行划列处理约束的方法,由题目易知,节点3和4的已知水平位移和垂直位移都为零,划去其相对应的行和列,则总刚矩阵由8阶变为4阶,矩阵如下:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧--=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------2/02/03/13043/203/73/23/443/23/133/43/23/43/43/73292211p p v u v u Et329][Et K =1 2 3 413/133/43/43/743/23/23/4----3/13/23/21----000243/23/23/4----3/13003/73/43/403/13/23/21----33/13/23/21----3/43/403/13003/743/23/23/4----40003/13/23/21----43/23/23/4----3/133/43/43/7化简⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧--=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------Et p Et p v u v u 3/1603/160130122072412213424472211 五、求解线性方程组方法:采用LU 分解法 1.求解矩阵[]U 各元素⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------75/10775/640075/6475/353007/767/27/7502447~7/877/87/7607/87/337/207/767/27/7502447~13012207241221342447⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----353/44900075/6475/353007/767/27/7502447~ 得到的[]U 矩阵如下:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=353/44900075/6475/353007/767/27/7502447U 2.求解矩阵[]L 各元素⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----13012207241221342447353/44900075/6475/353007/767/27/75024471353/6475/767/20175/27/40017/40001 得到的[]L 矩阵如下:[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--------=13012207241221342447L3.进行求解⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧---=⇒⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧--=Et p Et p Et p y Et p Et p Ly 79425/850800225/323/1603/1603/160⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----⇒=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡Et p Et p Et p v u v u y v u v u U 79425/850800225/323/160353/44900075/6475/353007/7675/27/750244722112211 解得Et p v /422.82-= Et p u /497.12-= Et p v /028.91-= Et p u /897.11=于是求得各节点的位移为:⎩⎨⎧-==Etp v Etp u /028.9/897.111 ⎩⎨⎧-=-=Etp v Etp u /422.8/497.122 ⎩⎨⎧==033v u ⎩⎨⎧==044v u 六、求解相应的支反力(运用静力学的平衡方程进行求解)3号节点和4号节点的支反力如下图所示:。
有限元作业

有限元作业一、名称:平面结构的静力学分析二、问题描述如图所示不规则板,板厚0.5,孔直径为1,倒角半径为0.4。
约束条件:在左边的孔约束全部自由度,载荷施加在右边圆的下半部分,两端施加最小值(50)逐渐均匀变大到底部的最大值(500)。
三、过程:1.选择单元格类型:新建材料类型Main Menu> Preprocessor > Material Props> Material Models> Structural > Linear > Elastic >Isotropic.并设置属性四、建立模型1.运行Main Menu> Preprocessor> Modeling> Create> Areas> Rectangle> By Dimensions分别输入:X1 = 0 X2 = 6 Y1 = -1 Y2 = 1X1 = 4 X2 = 6 Y1 = -1 Y2 = -3(1)在两个矩形的基础上依次建立两个圆形1运行Utility Menu> PlotCtrls> Pan, Zoom, Rotate2单击small dot3运行Utility Menu> WorkPlane> Display Working Plane4运行Utility Menu> WorkPlane> WP Settings点Polar .Grid. Triad5运行Main Menu> Preprocessor> Modeling> Create> Areas> Circle> Solid Circle6输入WP X = 0 WP Y = 07建立半径为1的圆.8同样的方法建立第二个圆(2)进行布尔运算运行Main Menu> Preprocessor> Modeling> Operate> Booleans> Add>Areas(3)倒圆角1.运行Utility Menu> PlotCtrls> Numbering点line numbering.2.运行Utility Menu> WorkPlane> Display Working Plane Main Menu>Preprocessor> Modeling> Create> Lines> Line Fillet选择17 和 8.3.输入半径0.44.运行Utility Menu> Plot> Lines5.运行Utility Menu> PlotCtrls> Pan, Zoom, Rotate点Zoom button.放大该区域6.运行Main Menu> Preprocessor> Modeling> Create> Areas> Arbitrary> ByLines选线4.5和17.运行Utility Menu> Plot> Areas分别建立两个孔1.运行Utility Menu> WorkPlane> Display Working Plane2.运行Main Menu> Preprocessor> Modeling> Create> Areas> Circle> SolidCircle输入WP X = 0WP Y = 03.建立半径为0.4的孔4.运行Utility Menu> WorkPlane> Offset WP to> Global Origin5.运行Main Menu> Preprocessor> Modeling> Create> Areas> Circle> SolidCircle选取点WP X = 0WP Y = 0建立第二个孔6.运行Utility Menu> WorkPlane> Display Working Plane7.运行Utility Menu> Plot> Replot和Utility Menu> Plot> Lines进行布尔运算运行Main Menu> Preprocessor> Modeling> Operate> Booleans> Add> Areas【一】设置材料属性运行Main Menu> Preprocessor> Material Props> Material Models如下图设置【二】定义实常数运行Main Menu> Preprocessor> Real Constants> Add/Edit/Delete输入【三】划分网格1.运行Main Menu> Preprocessor> Meshing> Mesh Tool Set Global Sizecontrol. 输入0.5。
国科大有限元作业1
作业1
1.叙述弹性力学中三维空间问题的平衡方程、几何方程、物理方程、力边界条
件和位移边界条件,并写出矩阵形式的表示式。
2.分别写出平面应力问题和平面应变问题的平衡方程、几何方程、物理方程、
力边界条件和变形协调方程,请以矩阵形式表示。
3.叙述最小势能原理,并写出其数学表示式。
4.试用流程图的形式概括有限单元法的分析过程。
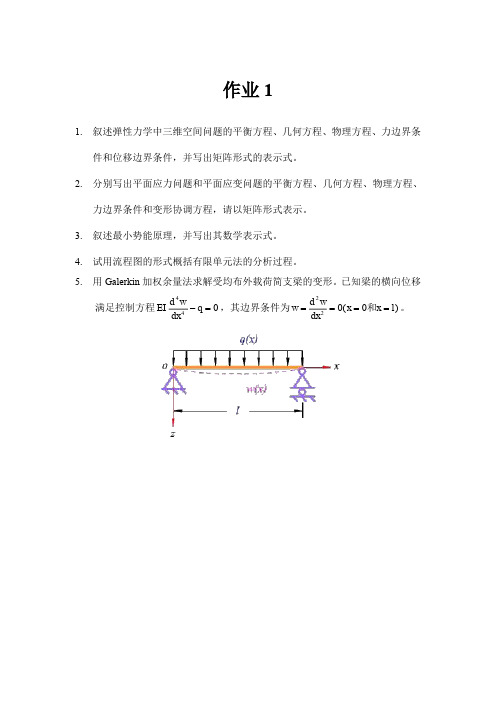
5.用Galerkin加权余量法求解受均布外载荷简支梁的变形。
已知梁的横向位移
满足控制方程
4
4
w
d
EI q
dx
-=,其边界条件为
2
2
0(0)
d w
w x x l
dx
====
和。
有限元作业

Bierenzuode,kanbudong作业1: 有一个等截面两节点二力杆,杆长为L ,截面积为A ,材料弹性模量为E 。
每个节点只考虑一个水平位移,对于图 (a)、(b) 所示的坐标系统和位移插值函数,分别求相应的[B]矩阵和单元刚度矩阵[K]。
解:(a )、212()u x x αα=+,由边界条件确定常数1α、2α:当0x =时,1i u α=;当x l =时,212j u l αα=+,可得2222()1i j x x u x u u l l ⎛⎫=-+ ⎪⎝⎭因每个节点只考虑一个水平位移故以矩阵形式表示的单元位移函数为:{}{}{}2211122222()1u u x x f x u N N u u ll ⎧⎫⎧⎫⎧⎫==-=⎨⎬⎨⎬⎨⎬⎩⎭⎩⎭⎩⎭单元的几何矩阵:[]''122222x x B N N l l ⎡⎤⎡⎤==-⎣⎦⎢⎥⎣⎦{}{}{}12x u E E B u σε⎧⎫=⨯=⎨⎬⎩⎭,即[][]D E = 对于矩形截面梁单元,积分:yzd dA =⎰⎰为单元横截面面积。
梁单元刚度矩阵[]0leT EA K B B dx ⎡⎤⎡⎤⎡⎤⎣⎦⎣⎦⎣⎦=⎰222202222l x x x l EA x ll l dx ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦-=-⎰44334433EAEA l l EAEA ll --⎡⎤⎢⎥⎢⎥⎣⎦=(b )、212()u x x x αα=+,由边界条件确定常数1α、2α:当2l x =-时,21224i a l a l u =-+;当2l x =时,21224j a l a l u =+可得222222()i j x lx x lxu x u u l l -+=+ 因每个节点只考虑一个水平位移故以矩阵形式表示的单元位移函数为:{}{}{}221112222222()u u x lxx lx f x u N N u u ll ⎧⎫⎧⎫⎧⎫-+===⎨⎬⎨⎬⎨⎬⎩⎭⎩⎭⎩⎭单元的几何矩阵:[]''122244x l x l B N N l l -+⎡⎤⎡⎤==⎣⎦⎢⎥⎣⎦{}{}{}12x u E E B u σε⎧⎫=⨯=⎨⎬⎩⎭,即[][]D E =对于矩形截面梁单元,积分:yzd dA =⎰⎰为单元横截面面积。