SEGGER使用方法
SEGGER SystemView集成使用文档
SEGGER SystemView 集成使用文档.docx修订记录Revision record目录1 概述 (6)1.1 SEGGER SystemView简介 (6)1.2 SystemView工作方式 (7)1.3 SystemView目标板资源需求 (7)1.4 SystemView特点 (8)2 开发环境和工具 (8)2.1 集成相关 (8)2.2 调试使用 (9)3 开发工具安装使用 (9)3.1 安装JLINK驱动 (9)3.2 SystemView运行 (11)4 软件集成(FreeRTOS系统) (13)4.1 软件包获取 (13)4.2 拷贝需要的文件到目标程序中 (13)4.3 工程建立文件链接 (14)4.4 配置FreeRTOS相关文件 (14)4.5 编译后运行 (15)4.6 FreeRTOS打补丁支持Systick和Scheduler (15)5 调试使用 (16)5.1 SystemView界面介绍 (16)5.1.1 界面简介 (16)5.1.2 Event View (18)5.1.3 System View (19)5.1.4 Time View(Timeline) (20)5.1.5 CPU Load View (22)5.1.6 Contexts View (22)5.1.7 Terminal View (23)5.1.8 Log View (25)5.2 基本功能使用 (25)5.2.1 录制 (25)5.2.2 数据保存 (26)5.2.3 读取保存数据 (27)5.2.4 数据分析 (28)5.2.5 SystemView操作列表 (28)5.2.6 命令行选项 (32)5.3 调试语句 (34)5.3.1 跟踪打印 (34)5.3.2 中断调试相关 (34)5.3.3 事件调试 (35)5.3.4 SystemView API函数汇总表 (39)6 常见问题 (42)6.1 J-Link Library not fouond (42)6.2 Could not connect (43)6.3 RTT Control Block not found (43)6.4 调试时报Overflow Events (45)6.5 调试时1000000events, Recording stopped (46)6.6 ... ..................................................................................................................................... 错误!未定义书签。
JLINK-rtt使用经验

Jlink RTT使用说明单片机进行调试,一般都会分配出来一个调试的串口,如果单片机使用jlink烧录器,那么可以使用调试工具-RTT来代替串口进行信息的交互,不需要使用串口。
RTT(Real Time Terminal)是SEGGER公司新出的可以在嵌入式应用中与用户进行交互的实时终端。
J-Link驱动4.90之后的版本都支持RTT。
需要安装J-Link驱动4.90之后的版本1、使用JLINK SEGGER RTT打印调试信息然后将这四个文件添加到自己工程中去,并且在主程序工程中包含SEGGER_RTT.h文件。
然后我们就可以直接在主函数中调用SEGGER_RTT_printf函数来打印调试信息了,该函数用法和printf函数类似,只是多了一个参数用来指定RTT通道。
其中通道0,就是我们在调试时使用的通道。
在主函数中添加如下代码即可打印信息。
SEGGER_RTT_printf(0,"Times %d\r\n",++u32Counter);这个函数不支持浮点数,如输出浮点数可以先使用sprintf输出到缓存,再使用SEGGER_RTT_WriteString输出。
char rtt_out_str[80];sprintf(rtt_out_str,"FloatValueIs%f;\n",var_float);SEGGER_RTT_WriteString(0,rtt_out_str);单独打开RTT VIEWER 可以使用如果打开JLinkRTTClient,必须同时打开RTT VIEWER 才可以使用2、RTT输入检测首先在程序中添加SEGGER_RTT_Read(0,rtt_buf,sizeof(rtt_buf));其次在J-Link RTT Viewer控制台的Input里面选择Sending/Send on Enter,然后End of Line 选择None这样就可以通过下方输入框输入信息,按Enter发送RTT VIEWER input设置Win10自带的截图功能非常好用,快捷键Win + Shift + S。
1GISTAR 快速入门手册
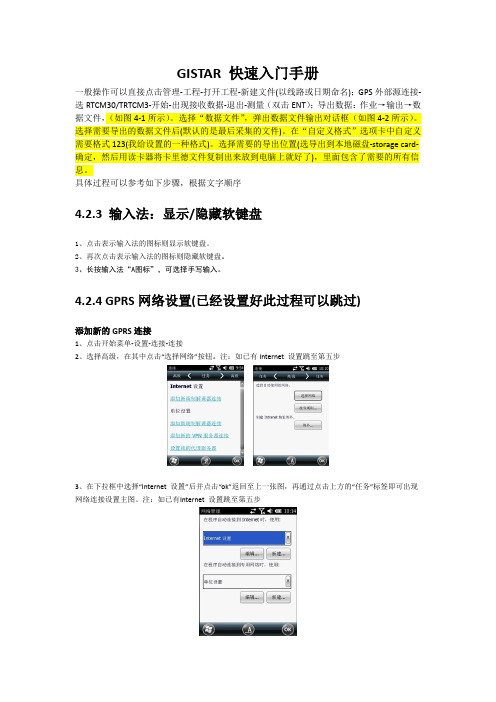
GISTAR 快速入门手册一般操作可以直接点击管理-工程-打开工程-新建文件(以线路或日期命名);GPS外部源连接-选RTCM30/TRTCM3-开始-出现接收数据-退出-测量(双击ENT);导出数据:作业→输出→数据文件,(如图4-1所示)。
选择“数据文件”,弹出数据文件输出对话框(如图4-2所示)。
选择需要导出的数据文件后(默认的是最后采集的文件)。
在“自定义格式”选项卡中自定义需要格式123(我给设置的一种格式)。
选择需要的导出位置(选导出到本地磁盘-storage card-确定,然后用读卡器将卡里德文件复制出来放到电脑上就好了),里面包含了需要的所有信息。
具体过程可以参考如下步骤,根据文字顺序4.2.3 输入法:显示/隐藏软键盘1、点击表示输入法的图标则显示软键盘。
2、再次点击表示输入法的图标则隐藏软键盘。
3、长按输入法“A图标”,可选择手写输入。
4.2.4 GPRS网络设置(已经设置好此过程可以跳过)添加新的GPRS连接1、点击开始菜单-设置-连接-连接2、选择高级,在其中点击“选择网络”按钮。
注:如已有Internet 设置跳至第五步3、在下拉框中选择“Inte rnet 设置”后并点击“ok”返回至上一张图,再通过点击上方的“任务”标签即可出现网络连接设置主图。
注:如已有Internet 设置跳至第五步4、点击Internet 设置下面的添加新调制解调器连接。
5、在选择调制解调器栏,选择电话线路(GPRS ),然后点击下一步。
添加新的GPRS 连接6、输入访问点名称cmnet (WAP 包月则输入cmwap ),点击下一步。
7、点击完成一、软件的设置说明1、“工程”设置(1)、新建工程管理→工程→新建工程(如图2.1-1所示)。
选择“新建工程”,弹出工程信息界面(如图2.1-2所示)。
2.1.1-1 2.1.1-2(2)、坐标系统及采集设置对工程名称、储存路径、创建日期、操作人员、工程说明等工程信息进行设定后,点击“下一步”,进入坐标系统界面(如图2.1.2-1所示)。
SEGGER使用方法
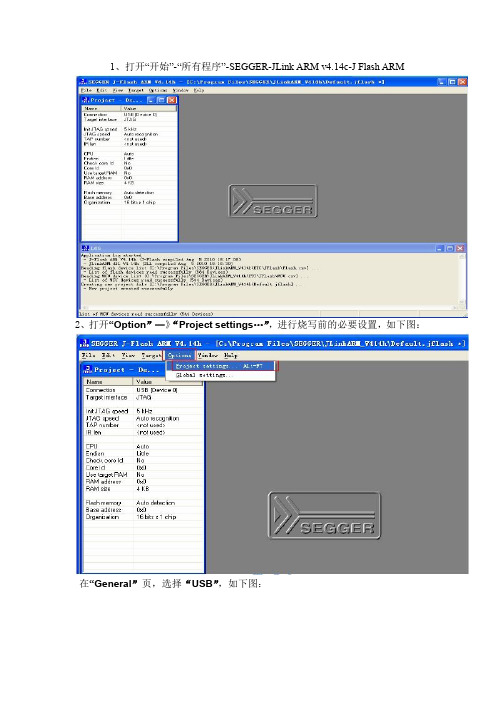
1、打开“开始”-“所有程序”-SEGGER-JLink ARM v4.14c-J Flash ARM
2、打开“Option”—》“Project settings…”,进行烧写前的必要设置,如下图:
在“General”页,选择“USB”,如下图:
在“Target Interface”页,选择“JTAG”,JTAG速度设置为“Auto selection”,如下图
在“CPU”页,选择开发板的CPU型号:ST STM32F103VB,如下图:
“FLASH”页不用设置,默认设置就可以了。
在“Production”页,我们把“Start application”选上,则在下载成功之后,程序会自动运行。
在设置完成后,我们点击“应用”和“确定”退出。
在JLINK软件界面左边,将显示烧写信息,如下图:
我们点击“Target”—》“Connect”,开始连接目标板:
连接成功会有提示信息,如下边的状态拦:
接着,我们在“File”—》“open”中打开烧录的HEX文件,如图:
加载完成后,选择“Target”—》“Auto”或者快捷键“F7”进行自动烧录:
烧写成功!如下图:
烧写成功之后,JLINK自动断开与开发板的连接。
我们可以看到,程序已经在开发板上运行了!。
哈斯开机,关机,对刀操作。G代码和M代码介绍
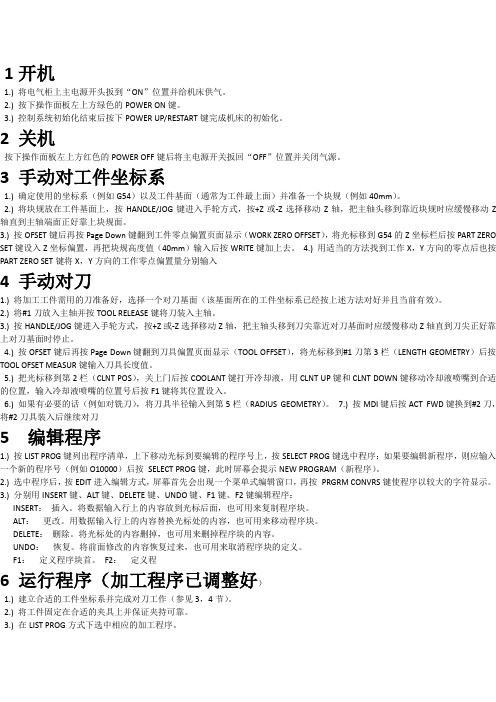
1开机1.) 将电气柜上主电源开头扳到“ON”位置并给机床供气。
2.) 按下操作面板左上方绿色的POWER ON键。
3.) 控制系统初始化结束后按下POWER UP/RESTART键完成机床的初始化。
2 关机按下操作面板左上方红色的POWER OFF键后将主电源开关扳回“OFF”位置并关闭气源。
3 手动对工件坐标系1.) 确定使用的坐标系(例如G54)以及工件基面(通常为工件最上面)并准备一个块规(例如40mm)。
2.) 将块规放在工件基面上,按HANDLE/JOG键进入手轮方式,按+Z或-Z选择移动Z轴,把主轴头移到靠近块规时应缓慢移动Z 轴直到主轴端面正好靠上块规面。
3.) 按OFSET键后再按Page Down键翻到工件零点偏置页面显示(WORK ZERO OFFSET),将光标移到G54的Z坐标栏后按PART ZERO SET键设入Z坐标偏置,再把块规高度值(40mm)输入后按WRITE键加上去。
4.) 用适当的方法找到工作X,Y方向的零点后也按PART ZERO SET键将X,Y方向的工作零点偏置量分别输入4 手动对刀1.) 将加工工件需用的刀准备好,选择一个对刀基面(该基面所在的工件坐标系已经按上述方法对好并且当前有效)。
2.) 将#1刀放入主轴并按TOOL RELEASE键将刀装入主轴。
3.) 按HANDLE/JOG键进入手轮方式,按+Z或-Z选择移动Z轴,把主轴头移到刀尖靠近对刀基面时应缓慢移动Z轴直到刀尖正好靠上对刀基面时停止。
4.) 按OFSET键后再按Page Down键翻到刀具偏置页面显示(TOOL OFFSET),将光标移到#1刀第3栏(LENGTH GEOMETRY)后按TOOL OFSET MEASUR键输入刀具长度值。
5.) 把光标移到第2栏(CLNT POS),关上门后按COOLANT键打开冷却液,用CLNT UP键和CLNT DOWN键移动冷却液喷嘴到合适的位置,输入冷却液喷嘴的位置号后按F1键将其位置设入。
芯达STM32入门系列教程之三《如何使用J-Flash调试》

STM32入门系列教程如何使用J-Flash调试Revision0.01(2010-04-12)对初学者来说,要进行STM32的程序下载调试,一般有三种方法:(1)使用SEGGER J-Flash(J-Link)下载程序到闪存中运行;(2)使用串口ISP来下载HEX文件到CPU中运行;(3)J-Link+MDK组合,来在线调试程序(可下载、调试)。
本文档讲述如何在芯达STM32开发板上使用SEGGER J-Flash下载HEX文件。
而其他两种方法,我们将在文档《如何使用MDK+J-Link调试》、以及《如何使用STM32-ISP下载调试》中详细说明。
先来解释SEGGER。
实际上,大家更为熟悉的ARM仿真器J-Link,就是由SEGGER公司开发的。
J-Link是SEGGER为支持仿真ARM内核芯片推出的JTAG 仿真器。
不管什么CPU的仿真器,都需要安装其相应的驱动后才能使用。
J-Link也不例外,它的驱动软件可以去官方网站:下载最新版本。
这里使用的驱动软件版本是V4.08l,该驱动的安装非常简单,请参考文档《如何安装J-Link驱动软件》。
安装完毕,会出现如下两个图标:现在开始我们的工作吧!步骤一先进行设备连接操作。
芯达STM开发板的JTAG口(开发板面朝上,最顶端有一个JTAG20pin的插口),与J-Link V8仿真器的输出排线连接,J-Link另一头的USB插口则插在电脑的USB口上。
这时,J-Link的指示灯开始闪烁,并保持“点亮”的状态。
注意:大家购买J-Link仿真器的时候,JTAG接口要求是标准的20pin的2.54间距的针座。
否则需要转接卡进行JTAG接口的转换。
步骤二进入PC的桌面,点击上图左边的图标:J-Flash ARM V4.081,出现如下界面:步骤三我们先来进行project设置,保存后会自动识别该配置。
不进行project设置,则在后续步骤进行连接connect开发板的时候,会提示找不到flash 设备下载,导致无法连接,如下所示:点击“Options”,再点击“Project settings”,如下图所示:步骤四在弹出的窗口中进行设置。
jlinkpylink用法

jlinkpylink用法JLink和PyLink是两种常用的软件包,用于在Python中与JTAG接口的设备进行通信。
JLink是一种硬件工具,由SEGGER公司提供,用于与各种处理器和微控制器进行调试和仿真。
PyLink是由JLink提供的Python接口,可以通过Python脚本与JLink进行通信。
下面是JLink和PyLink的使用方法的详细解释:1. 安装JLink软件包:2. 连接JLink硬件:将JLink调试器通过USB连接到计算机上。
确保JLink调试器的电源正常,设备也正确连接到目标设备的JTAG接口。
3. 编写Python脚本:导入PyLink软件包,并创建一个PyLink实例:```pythonimport pylink```4.设置目标设备:使用`open(`方法打开和连接到目标设备。
您需要提供目标设备的名称或ID。
例如,要连接到一个ARM Cortex-M微控制器,可以使用以下代码:```python```5.进行调试操作:一旦连接到目标设备,您可以执行各种调试操作。
以下是一些示例:-读写寄存器:```pythonvalue = jlink.read_reg(0x1000) # 读取地址0x1000处的寄存器值```-读写内存:```pythondata = jlink.read_mem(0x2000, 16) # 从地址0x2000开始读取16个字节的数据```-设置断点:```python```6.关闭连接:使用`close(`方法关闭与目标设备的连接:```python```以上是使用JLink和PyLink进行调试和仿真的基础用法。
您还可以通过PyLink软件包执行更多高级操作,如跟踪、性能分析和固件更新等。
详细的用法和功能可以在SEGGER公司的官方文档中找到。
jlink使用方法笔记
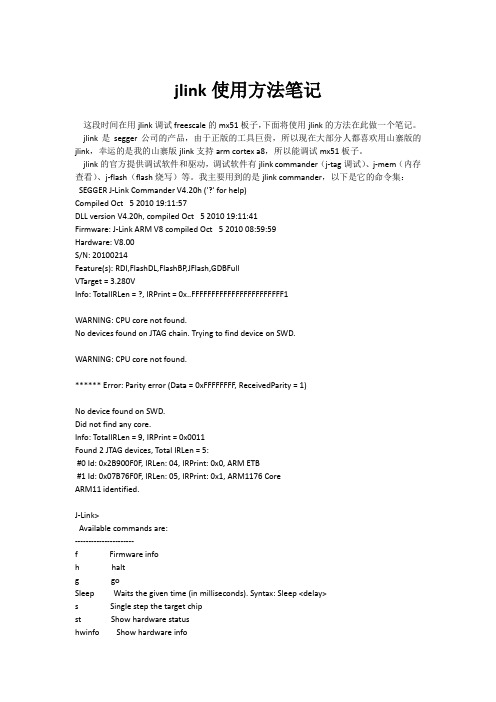
jlink使用方法笔记这段时间在用jlink调试freescale的mx51板子,下面将使用jlink的方法在此做一个笔记。
jlink是segger公司的产品,由于正版的工具巨贵,所以现在大部分人都喜欢用山寨版的jlink,幸运的是我的山寨版jlink支持arm cortex a8,所以能调试mx51板子。
jlink的官方提供调试软件和驱动,调试软件有jlink commander(j-tag调试)、j-mem(内存查看)、j-flash(flash烧写)等。
我主要用到的是jlink commander,以下是它的命令集:SEGGER J-Link Commander V4.20h ('?' for help)Compiled Oct 5 2010 19:11:57DLL version V4.20h, compiled Oct 5 2010 19:11:41Firmware: J-Link ARM V8 compiled Oct 5 2010 08:59:59Hardware: V8.00S/N: 20100214Feature(s): RDI,FlashDL,FlashBP,JFlash,GDBFullVTarget = 3.280VInfo: TotalIRLen= ?, IRPrint = 0x..FFFFFFFFFFFFFFFFFFFFFFF1WARNING: CPU core not found.No devices found on JTAG chain. Trying to find device on SWD.WARNING: CPU core not found.****** Error: Parity error (Data = 0xFFFFFFFF, ReceivedParity = 1)No device found on SWD.Did not find any core.Info: TotalIRLen = 9, IRPrint = 0x0011Found 2 JTAG devices, Total IRLen = 5:#0 Id: 0x2B900F0F, IRLen: 04, IRPrint: 0x0, ARM ETB#1 Id: 0x07B76F0F, IRLen: 05, IRPrint: 0x1, ARM1176 CoreARM11 identified.J-Link>Available commands are:----------------------f Firmware infoh haltg goSleep Waits the given time (in milliseconds). Syntax: Sleep <delay>s Single step the target chipst Show hardware statushwinfo Show hardware infomem Read memory. Syntax: mem <Addr>, <NumBytes> (hex)mem8 Read 8-bit items. Syntax: mem8 <Addr>, <NumBytes> (hex) mem16 Read 16-bit items. Syntax: mem16 <Addr>, <NumItems> (hex) mem32 Read 32-bit items. Syntax: mem32 <Addr>, <NumItems> (hex)w1 Write 8-bit items. Syntax: w1 <Addr>, <Data> (hex)w2 Write 16-bit items. Syntax: w2 <Addr>, <Data> (hex)w4 Write 32-bit items. Syntax: w4 <Addr>, <Data> (hex)wm Write test words. Syntax: wm<NumWords>is Identify length of scan chain select registerms Measure length of scan chain. Syntax: ms<Scan chain>mr Measure RTCK react time. Syntax: mrq Quitqc Close JLink connection and quitr Reset target (RESET)rx Reset target (RESET). Syntax: rx<DelayAfterReset> RSetType Set the current reset type. Syntax: RSetType<type>Regs Display contents of registerswreg Write register. Syntax: wreg<RegName>, <Value>SetBP Set breakpoint. Syntax: SetBP<addr> [A/T] [S/H]SetWP Set Watchpoint. Syntax: <Addr> [R/W] [<Data> [<D-Mask>] [A-Mask]] ClrBP Clear breakpoint. Syntax: ClrBP <BP_Handle>ClrWP Clear watchpoint. Syntax: ClrWP <WP_Handle>VCatch Write vector catch. Syntax: VCatch<Value>loadbin Load binary file into target memory.Syntax: loadbin<filename>, <addr>savebin Saves target memory into binary file.Syntax: savebin<filename>, <addr>, <NumBytes>SetPC Set the PC to specified value. Syntax: SetPC<Addr>le Change to little endian modebe Change to big endian modelog Enables log to file. Syntax: log <filename>unlock Unlocks a device. Syntax: unlock <DeviceName>Type unlock without <DeviceName> to get a listof supported device names.nRESET has to be connected---- CP15 ------------rce Read CP15. Syntax: rce<Op1>, <CRn>, <CRm>, <Op2>wce Write CP15. Syntax: wce<Op1>, <CRn>, <CRm>, <Op2>, <Data>---- ICE -------------Ice Show state of the embedded ice macrocell (ICE breaker)ri Read Ice reg. Syntax: ri<RegIndex>(hex)wi Write Ice reg. Syntax: wi<RegIndex>, <Data>(hex)---- ETM -------------etm Show ETM statusre Read ETM reg. Syntax: re <RegIndex>we Write ETM reg. Syntax: we <RegIndex>, <Data>(hex)es Start trace---- ETB -------------etb Show ETB statusrb Read ETB register. Syntax: rb<RegIndex>wb Write ETB register. Syntax: wb<RegIndex>, <Data>(hex)---- TRACE -----------TAddBranch TRACE - Add branch instruction to trace buffer. Paras:<Addr>,<BAddr> TAddInst TRACE - Add (non-branch) instruction to trace buffer. Syntax: <Addr> TClear TRACE - Clear bufferTSetSize TRACE - Set Size of trace bufferTSetFormat TRACE - SetFormatTSR TRACE - Show Regions (and analyze trace buffer)TStart TRACE - StartTStop TRACE - Stop---- SWO -------------SWOSpeed SWO - Show supported speedsSWOStart SWO - StartSWOStop SWO - StopSWOStat SWO - Display SWO statusSWORead SWO - Read and display SWO dataSWOShow SWO - Read and analyze SWO dataSWOFlush SWO - Flush data---- File I/O --------fwrite Write file to emulatorfread Read file from emulatorfshow Read and display file from emulatorfdelete Delete file on emulatorfsize Display size of file on emulator---- Test ------------thg Run go/halt 1000 timests Run step 1000 timestestwspeed Test download speed. Syntax: testwspeed [<Addr> [<Size>]] testrspeed Test upload speed. Syntax: testrspeed [<Addr> [<Size>] [<NumBlock s>]]testcspeed Test CPU speed. Syntax: testcspeed [<RAMAddr>]---- JTAG ------------Config Set number of IR/DR bits before ARM device.Syntax: Config<IRpre>, <DRpre>speed Set JTAG speed. Syntax: speed <freq>|auto|adaptive, e.g. speed 2000, speed ai Read JTAG Id (Host CPU)wjc Write JTAG command (IR). Syntax: wjc<Data>(hex)wjd Write JTAG data (DR). Syntax: wjd<Data32>(hex), <NumBits>(dec) RTAP Reset TAP Controller using state machine (111110)wjraw Write Raw JTAG data. Syntax: wjraw<NumBits(dec)>, <tms>, <tdi>rt Reset TAP Controller (nTRST)---- JTAG-Hardware ---c00 Create clock with TDI = TMS = 0c Clock0 Clear TDI1 Set TDIt0 Clear TMSt1 Set TMStrst0 Clear TRSTtrst1 Set TRSTr0 Clear RESETr1 Set RESET---- Connection ------usb Connect to J-Link via USB. Syntax: usb<port>, where port is 0..3ip Connect to J-Link ARM Pro or J-Link TCP/IP Server via TCP/IP.Syntax: ip<ip_addr>---- Configuration ---si Select target interface. Syntax: si<Interface>,where 0=JTAG and 1=SWD.power Switch power supply for target. Syntax: power <State> [perm], where State is either On or Off. Example: power on permwconf Write configuration byte. Syntax: wconf<offset>, <data>rconf Read configuration bytes. Syntax: rconfusbaddr Assign usb address to the connected J-Link: Syntax: usbaddr = <addr> ipaddr Show/Assign IP address and subnetmask of/to the connected J-Link. gwaddr Show/Assign network gateway address of/to the connected J-Link. dnsaddr Show/Assign network DNS server address of/to the connected J-Link. conf Show configuration of the connected J-Link.ecp Enable the J-Link control panel.calibrate Calibrate the target current measurement.----------------------NOTE: Specifying a filename in command linewill start J-Link Commander in script mode.总结一下我们使用的最多的命令:usb--------连接目标板r----------重启目标板halt-------停止cpu运行的程序loadbin----加载可执行的二进制文件g----------跳到代码段地址执行s----------单步执行(调试用)setpc-----设置pc寄存器的值(调试用)setbp-----设置断点Regs-------读寄存器组织wreg-------写寄存器mem--------读内存w4---------写内存power off mmu---关闭mmu,这个对于裸板调试很重要w4 cpsr,0x0000001f------切换到系统模式speed------设置jtag的传输速率rce 0,c0,c0,0-----设置cp15寄存器的第1个寄存器为0 完结。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、打开“开始”-“所有程序”-SEGGER-JLink ARM v4.14c-J Flash ARM
2、打开“Option”—》“Project settings…”,进行烧写前的必要设置,如下图:
在“General”页,选择“USB”,如下图:
在“Target Interface”页,选择“JTAG”,JTAG速度设置为“Auto selection”,如下图
在“CPU”页,选择开发板的CPU型号:ST STM32F103VB,如下图:
“FLASH”页不用设置,默认设置就可以了。
在“Production”页,我们把“Start application”选上,则在下载成功之后,程序会自动运行。
在设置完成后,我们点击“应用”和“确定”退出。
在JLINK软件界面左边,将显示烧写信息,如下图:
我们点击“Target”—》“Connect”,开始连接目标板:
连接成功会有提示信息,如下边的状态拦:
接着,我们在“File”—》“open”中打开烧录的HEX文件,如图:
加载完成后,选择“Target”—》“Auto”或者快捷键“F7”进行自动烧录:
烧写成功!如下图:
烧写成功之后,JLINK自动断开与开发板的连接。
我们可以看到,程序已经在开发板上运行了!。