CASIO万能坐标计算程序
卡西欧4800万能程序

卡西欧4800 万能程序文件名:ZXA”CZX”:B”CZY”:C”FYX”:D”FYY”回车Pol(C-A,D-B) 回车E”FWJ”=J▲F”L”=I▲文件名:(主程序TXTL)运行这个A”CZ-X=”回车B”CZ-Y=”回车Lbi0回车Prog”SJ”回车Prog”JS”回车Goto0回车文件名:(JS)Norm:Deg: 回车Z[5]=90O÷R∏:P=O²÷(24R):M=O÷2-O∧3÷240÷R²:L=R∏(AbsQ-2Z[5]) ÷180:T=(R+P) tan(AbsQ÷2)+M回车D=E-F:D≦0﹦﹥Goto1:≠﹦﹥D≦O﹦﹥Goto2: ≠﹦﹥D=E-F-O:D≦L﹦﹥Goto3: ≠﹦﹥D=F+2O+L-E:D≥0﹦﹥Goto4: ≠﹦﹥Goto5△△△△回车Lbi1回车S=E-F:C=Z:U=Z回车Goto6回车Lbi2回车U=D-D∧5÷(40R²O²):V=D∧3÷(6RO):Z[1]=90D²÷(RO∏) 回车Goto7回车Lbi3回车U=M+Rsin(Z[5]+180D÷R∏ ):V=R+P-Rcos(Z[5]+180D÷R∏):Z[1]= Z[5]+180D÷R÷∏回车Goto7回车Lbi7回车Z[2]=tan-1(V÷U):S=∫(U²+V²): 回车Q≦0﹦﹥C=Z-Z[2]:U=Z-Z[1]: ≠﹦﹥C=Z+Z [2]:U=Z+Z[1]△回车Goto6回车Lbi4回车U=D-D∧5÷(40R²O²):V=D∧3÷(6RO):Z[2]= tan-1(V÷U):S=∫(U²+V²):Z[1]=D²*180÷(6RO∏)*3回车Q≦0﹦﹥C=Z+Q+Z[2]+180:U=Z+Q+Z[1]: ≠﹦﹥C=Z+Q-Z[2]+180:U=Z+Q-Z[1]△回车Goto8回车Lbi8回车X=ScosC+G+T cosZ+T cos(Z+Q):Y=SsinC+H+T sinZ+ T sin(Z+Q) 回车Goto9回车Lbi5回车S=(E-F-2O-L):U=Z+Q:C=U:Goto8回车Lbi6回车X=ScosC+G:Y=SsinC+H回车Goto9回车Lbi9:Fix4回车Z[3]”X”=X+Wcos(U+K)▲Z[4]”Y”=Y+Wsin(U+K)▲Pol(Z[3]-A,Z[4]-B:Fixm:J<0﹦﹥J=J+360△J”FWJ”=J▲I”L”=I▲Norm回车文件名:SJ{ K,E,W,N }回车E”CS空格DK+”回车W”BIAN 空格KUAN空格E=”回车K”Y+90°><Z-90°”回车N”1:ZHENG空格XI”回车N=1﹦﹥Prog”Z”:≠﹦﹥N=2﹦﹥Prog”Z1”:≠﹦﹥N=3﹦﹥Prog”Z2”:≠﹦﹥N=4﹦﹥Prog”Z3”:≠﹦﹥Prog”GYDL” :≠﹦﹥N=3﹦﹥Prog”ZY”回车文件名【数据库】(Z)E≦第二条曲线ZH点里程﹦﹥F=第一条曲线ZH点里程:O=第一条缓和曲线长:R=第一条半径长度:G=第一条曲线ZH点X的坐标:H=第一条曲线ZH 点Y的坐标:Z=第一条曲线方位角:Q=第一条曲线转角值:≠﹦﹥E≦第三条曲线ZH点里程﹦﹥F=第二条曲线ZH点里程:O=第二条缓和曲线长:R=第二条半径长度:G=第二条曲线ZH点X的坐标:H=第二条曲线ZH点Y的坐标:Z=第二条曲线方位角:Q=第二条曲线转角值:≠﹦﹥以此类推文件名:(QXYS)R”R”:L”L0”:A”ZXJ”回车B”B0”=(L÷2R)*(180÷∏) ▲M”M”=( L÷2)-(L∧3÷240R²)▲P”P’=L²÷240R▲T”T”=M+(R+P)*tan(A÷2)▲Z”L”=L+∏RA÷180▲E=(R+P)*(1÷cos(A÷2))-R▲Q=2T-Z回车(4800注意变量)解释:CZ-X= 输入置镜点X坐标CZ-Y=输入置镜点Y坐标CS DK+?输入待求里程BIAN KUAN E=?输入距离中桩的距离Y+90°><Z-90°? 输入构造物与线路的夹角1:ZHENG XI?选着数据库坐标XY….FWJ=置镜点到放样点的方位角L=置镜点到放样点的平距循环。
CASIO任意曲线坐标计算程序及说明

个人测量资料汇集韦习耀2005年8月起缓和曲线(ZH到HY)中桩坐标CASIO4800/4850计算程序A"ZHX":B"ZHY":C"LS":Q:R:K:M"DK ZH"↙LB1 1:{L}:L"DK":X=A+((L-M)-(L-M)5÷(40R2C2))cosQ-((L-M)3÷(6RC))KsinQ◢Y=B+((L-M)-(L-M)5÷(40R2C2))sinQ+((L-M)3÷(6RC))KcosQ ◢Goto 1说明:(A,B)为ZH点坐标,LS为缓和曲线长,Q为ZH点放位角,R 为半径,左转K为-1,右转K为1,M为ZH点里程,L为所求点的里程。
缓和曲线(HY到HZ)中桩坐标CASIO4800/4850计算程序A"HZX":B"HZY":C"LS":Q:R:K:M"DK HZ"↙LB1 1:{L}:L"DK":X=A+((-(L-M))-(-(L-M))5÷(40R2C2))cosQ-((-(L-M))3÷(6RC))KsinQ◢Y=B+((-(L-M))-(-(L-M))5÷(40R2C2))sinQ+((-(L-M))3÷(6RC))KcosQ◢Goto 1说明:(A,B)为HZ点坐标,LS为缓和曲线长,Q为HZ点放位角,R 为半径,左转K为-1,右转K为1,M为HZ点里程,L为所求点的里程。
另外注意,这个程序是把HZ点当作ZH点,倒过来算,方位角Q 和K均应注意其值。
圆曲线(HY到YH)中桩坐标CASIO4800/4850计算程序A"HYX":B"HYY":C"LS":Q:R:K:M"DK HY"↙LB1 1:{L}:L"DK":X=A+2Rsin(90(L-M)÷(πR))cos(Q +90((L-M)+C)÷(πR)K)◢Y=B+2Rsin(90(L-M)÷(πR))sin(Q+90((L-M)+C)÷(πR)K)◢Goto 1说明:(A,B)为HY点坐标,LS为缓和曲线长,Q为ZH点放位角,R 为半径,左转K为-1,右转K为1,M为HY点里程,L为所求点的里程。
卡西欧5800多功能实用坐标正反算小程序(附后方交会程序)
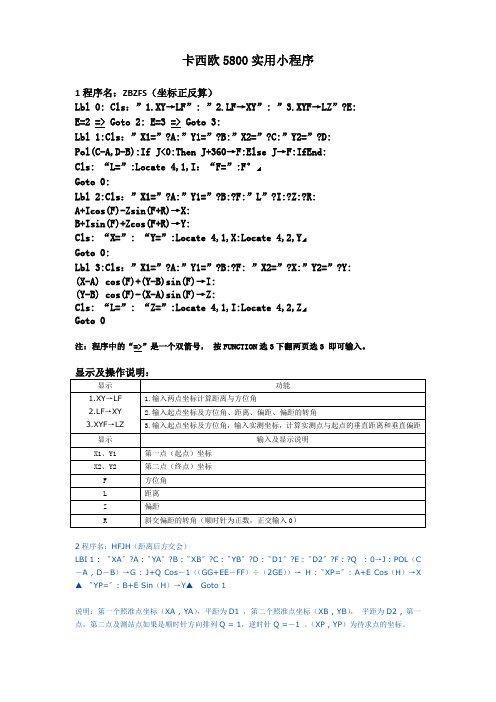
Goto0:
Lbl3:Cls:”X1=”?A:”Y1=”?B:?F: ”X2=”?X:”Y2=”?Y:
(X-A)cos(F)+(Y-B)sin(F)→I:
(Y-B)cos(F)-(X-A)sin(F)→Z:
Cls:“L=”: “Z=”:Locate4,1,I:Locate 4,2,Z◢
Goto0
注:程序中的“=>”是一个双箭号, 按FUNCTION选3下翻两页选3 即可输入。方Biblioteka 角L距离Z
偏距
R
斜交偏距的转角(顺时针为正数,正交输入0)
2程序名:HFJH(距离后方交会)
LBI 1 :〝XA〞?A :〝YA〞?B :〝XB〞?C :〝YB〞?D :〝D1〞?E :〝D2〞?F :?Q : 0→J : POL(C-A , D-B)→G : J+Q Cos-1((GG+EE-FF)÷(2GE))→H :〝XP=〞: A+E Cos(H)→X▲〝YP=〞: B+E Sin(H)→Y▲Goto1
显示及操作说明:
显示
功能
1.XY→LF
2.LF→XY
3.XYF→LZ
1.输入两点坐标计算距离与方位角
2.输入起点坐标及方位角、距离、偏距、偏距的转角
3.输入起点坐标及方位角,输入实测坐标,计算实测点与起点的垂直距离和垂直偏距
显示
输入及显示说明
X1、Y1
第一点(起点)坐标
X2、Y2
高速MC公路测量CASIO4800&4850万能坐标计算程序(完整版)

高速公路测量CASIO4800&4850万能坐标计算程序(完整版)程序特点:真正的全线贯通坐标正反计算、任意斜角计算!!!程序中加入测站点,真正的实现了“坐标法”与“极坐标法”两种放样方法的同时显示的功能,使得放样操作方法选择时更加灵活!!!在曲线元要素输入时仅需要输入第一段全部曲线元要素,后面曲线元要素除起点半径、终点半径、曲线长、转向需输入外其他要素均从前一曲线按辛普森8等分计算得出,解决了主线坐标计算无法获得第二段及其以后曲线元起点参数的问题;辛普森公式任意等分,满足所有精度要求;全线曲线元数据一次性程序化输入,参数存储采用扩充变量数据库,无需修改程序内容;多功能采用单程序编程,避免频繁调用子程序,提高运算速度。
一、程序:ZBJSW“1.ZS 2.FS 3.SZ”:W=1=>Z[2]=0:V=0:Goto 1 ΔW=2=> Goto 4ΔW=3=> O “KOU LING”:O≠123456=>O=0: “OUT”◢Goto CΔO=0: V=0:Z[1]=0:Goto 0←┘Lbi 0←┘”N0.”:Z[1]+1 ◢Z[1]=0=>{ABCREFGUKO}:A“X0”:B“Y0”:C“F0”:R“R0”:E“RN”:F“D0”:G “LS”:U“G”:K“X(00)”: O“Y(00)”: Z[Z[1]×8+3]=A:Z[Z[1]×8+4]=B:Z[Z[1]×8+5]=C:Z[Z[1]×8+6]= R-1:Z[Z[1]×8+7]= E-1:Z[Z[1]×8+8]=F: Z[Z[1]×8+9]=F+G: Z[Z[1]×8+10]=U:“NEXT”◢Isz Z[1]: Goto 0ΔZ[1]=1=>D=Z[9]:Z=0:Z[2]=0:GOTO 2ΔD=Z[(Z[1]-1)×8+9]:Z=0:Z[2]=Z[1]-1:GOTO 2←┘Lbi A←┘Z[Z[1]×8+3]=X:Z[Z[1]×8+4]=Y:Z[Z[1]×8+5]=J: Z[Z[1]×8+8]=D: {REGU}:R“R0”:E “RN”: G“LS”:U“G”: Z[Z[1]×8+6]=R-1:Z[Z[1]×8+7]=E-1: Z[Z[1]×8+9]=D+G: Z[Z[1]×8+10]=U:“NEXT”◢Isz Z[1]: Goto 0←┘Lbi 1←┘{DZT }:D:Z:T“RJ”:Z[2]=0:Goto 2←┘Lbi 2←┘V≠1=>Z[2]>Z[1] =>GoToCΔΔD≤Z[Z[2]×8+9]=> A=Z[Z[2]×8+3]:B=Z[Z[2]×8+4]: C =Z[Z[2]×8+5]:R=Z[Z[2]×8+6]: E=Z[Z[2]×8+7]: F=Z[Z[2]×8+8]: G=Z[Z[2]×8+9]: U=Z[Z[2]×8+10]: Goto3ΔIsz Z[2]:Goto 2←┘Lbi 3←┘W=3 =>N=8:≠P=U(E-R)÷Abs(G-F):Q=Abs(D-F)÷N:S=90Q÷π:J=C+(NPQ+2UR)NS:L=1←┘X=A+Q÷6×(Cos C+Cos J +4∑(Cos (C+((L+0.5)PQ+2UR)×(L+0.5)S),L,0,(N-1))+2∑(Cos (C+((LPQ+2UR)LS,L,1,(N-1)))+ZCos(J+ T)←┘Y=B+Q÷6×(Sin C+Sin J +4∑(Sin (C+((L+0.5)PQ+2UR)×(L+0.5)S),L,0,(N-1))+2∑(Sin (C+((LPQ+2UR)LS,L,1,(N-1)))+Z Sin(J+T):V=1=>Goto6ΔV=2=>Goto9ΔV=3=> GOTO CΔW=3=>GOTO AΔZ=0=>“X(Z)=”:X:Pause 0: “Y(Z)=”:Y◢Pol((X-K),(Y-O))←┘“S(Z)=”:I ◢J<0=> J=J+360Δ“F(Z)=”: J→DMS◢Goto 1ΔZ<0=>“X(L)=”:X:Pause 0: “Y(L)=”:Y◢Pol((X-K),(Y-O))←┘fx4850①“S(L)=”:I ◢J<0=> J=J+360Δ“F(L)=”: J→DMS◢Goto 1ΔZ>0=>“X(R)=”:X:Pause 0: “Y(R)=”:Y ◢Pol((X-K),(Y-O))←┘“S(R)=”:J ◢J<0=> J=J+360Δ“F(R)=”: J→DMS◢Goto 1 ←┘Z=0=> X “X(Z)=”◢Y “Y(Z)=”◢Pol((X-K),(Y-O))←┘I“S(Z)=”◢J<0=> J=J+360ΔJ“F(Z)=”◢Goto 1ΔZ<0=> X “X(L)=”◢Y “Y(L)”◢Pol((X-K),(Y-O))←┘fx4800②I“S(L)=”◢J<0=> J=J+360ΔJ“F(L)=”◢Goto 1ΔZ>0=> X “X(R)=”◢Y “Y(R)=”◢Pol((X-K),(Y-O))←┘I“S(R)=”◢J<0=> J=J+360ΔJ“F(R)=”◢Goto 1 ←┘Lbi 4←┘{MH} :M“X”:H“Y”:Z[2]=0:GOTO 5←┘Lbi 5←┘V=1:D= Z[Z[2]×8+9]:Z=0:T=90:GOTO 2←┘Lbi 6←┘K=((H -B)Cos(C-90)-(M-A)Sin(C-90))×((H -Y)Cos(J-90)-(M-X)Sin(J-90)):K≤0=> Goto 7ΔIsz Z[2]:Goto5←┘Lbi 7←┘D=F+Abs((H -B)Cos(C-90)-(M-A)Sin(C-90)):D>G=> Isz Z[2]: Goto5ΔGoto 8←┘Lbi 8←┘V=2 :GOTO 3←┘Lbi 9 ←┘K=(H -Y)Cos(J-90)-(M-X)Sin(J-90):Abs K<(1÷E)^3=>Goto BΔD=D+K :GOTO 8←┘Lbi B←┘V=3 :Z=0:Goto 3←┘Lbi C←┘Z=(H-Y) ÷Sin(J+90):“D”:D:Pause 0: “Z”: Z◢4850输出(Z=(H-Y) ÷Sin(J+90):D“D”◢Z “Z”◢4800输出)GOTO 4←┘Lbi C←┘二、说明a、编制说明本程序是运用复化辛普生公式根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距,对该曲线段范围内任意里程中边桩坐标进行计算,以及对卡西欧扩充变量的灵活应用,实现了真正意义上的的全线贯通及曲线要素输入程序化(在不修改程序内容的情况下可通过运行程序输入任意多段曲线元要素)。
CASIOFX4850公路计算程序精品文档17页
0前言:传统公路测量中,使用的仪器设备和方法都很落后,需带着数学用表、曲线用表、计算盘、计算尺和算盘等一类的工具,完成外业测量工作。
计算器的出现,改变了这一局面。
高速公路建设中,长大曲线比比皆是,传统中对公路中线的测设方法,被极坐标法彻底的否定与取代,但大量的计算工作,只能带着提前计算好的线路逐桩坐标、高程资料,进行外业测量工作,机动性很差,现场查找也不方便。
这些问题都能在CASIO系列可编程计算器上得到很好的解决,对C ASIO系列可编程计算器如何使用,直接影响到测量成果的质量和工作效率,本文将对CASIO系列可编程计算器快捷的计算方法进行分析与介绍。
1:以知线外任意点坐标,求对应线路里程在缓和曲线上,要计算任意里程的法线方向及任意宽度的边线坐标,非常简单。
但要计算任意一个已知坐标点,是对应哪一个里程法线方向上的点,就有一些困难。
很难推导一个这样的计算公式。
唯一的方法“渐进”,如果手工计算这可不是一个好方法。
但在有CASIO系列可编程计算器,如:FX-4500的情况下就变的非常简单了。
亦可用于直线和圆曲线的计算。
首先在缓和曲线上任选一点A为起始点,计算该点的坐标和切线方位角,通过坐标反算求起始点A与计算点B的方位角和距离,B点肯定对应A点切线方向上有一个垂足C点,把三点看成一个直角三角形,通过解直角三角形计算AC的距离,当该距离大于某一数值,如0。
001m,A点里程加AC的距离等于C点的里程,回到开始重新进入新一轮的计算,如果AC的距离小于某一规定值,则计算C点的里程与BC的距离即可。
求对应线路里程程序:主程序QLC (已知坐标求里程)Lb1 0:{LDE}:Prog XH:Goto 0子程序:XH (循环)L1 Lb1 1L2 Norm:Prog LYYD:L3 PO1(D-X,E-Y):W≤0=>W=W+360⊿L4 Z=W-I:A=V×cos Z:L=L+AL5 Abs A≥0.001=>Goto1:≠=>B=V×sinZ:Fix 3:“FXJL=”◢L6 L:Fix3:“DYLC=”◢程序中字母代表D 任意点X坐标,E 任意点Y坐标,DYLC 对应里程,FXJL 中线法线距离。
CASIO-fx-4850P-4800p-5800P-9750GⅡ程序运行示例及说明
程序运行示例及说明运行主程序“LQXJS”一、任意点坐标计算(道路、桥、涵)第一步:Z? 1(进入道路、桥、涵任意点坐标计算).第二步:A? 742589.425(输入起点的“X”坐标).第三步:B? 463404.387(输入起点的“Y”坐标).第四步:C? 15°23′31.7″(输入起点的方位角).第五步:D?1÷340 (输入起点曲率).第六步:E? 1÷2286.5(输入终点曲率).第七步:F? 714.188(输入起点桩号).第八步:G? 890.019 (输入终点桩号)第九步:H? 800 (输入待求点桩号)第十步:S? 0((输入待求点至中桩的距离(中心桩为“0”、左为“-”右为“+”) 第十一步:U=26°50′56.17″ (待求点所计算的切线方位角).第十二进步:X=742669.0657 (显示待求点所计算的“X”坐标).Y=463435.9536(显示待求点所计算的“Y”坐标).第十三步:Q? 1(输入“1”时返回第九步,再重复步骤第十步~十三步计算各点的道路坐标;当输入“0”时进入桥、涵坐标计算,再继续下面步骤).第十四步:P? 135(输入桥、涵中心点处纵向轴线(路线前进方向)与横向轴线(从左到右方向)之间的夹角.如图).第十五步:K? 0(输入桥、涵中心点处纵向轴线(路线前进方向)偏离切线方向的偏角(左“-”右“+”)如图). 第 107頁第十六步:J? 8(输入桥、涵的垂直跨距(桥、涵各点至中心处横向轴线的垂直距离的2倍)).第十七步:W? 20 (输入桥、涵上各点至纵向轴线(路线前进方向)的垂直距离(左“-”右“+”)如图). 第十八步: M? 1(计算以桥涵中心处横轴线为界在前面各点的坐标;(M=1为前面、M=-1为后面、M=0 为横轴线)如图).第十九步:L=742647.2359(显示待求点所计算的“X”坐标).N=463447.3197(显示待求点所计算的“Y”坐标).第二十步:返回第十六步,再根据需要计算各点坐标.第二十一步:J、W同时输入“0”则可以退出桥、涵坐标计算,并返回到程序第九步状态.二、坐标反算桩号、距离第一步:Z? 2(进入坐标反算桩号、距离).第二步:A? 742589.425(输入起点的“X”坐标).第三步:B? 463404.387(输入起点的“Y”坐标).第四步:C? 15°23′31.7″(输入起点的方位角).第五步:D?1÷340 (输入起点曲率).第六步:E? 1÷2286.5(输入终点曲率).第七步:F? 714.188(输入起点桩号).第八步:G? 890.019 (输入终点桩号)第九步:J? 742669.0657(输入已知点X坐标).第十步:P? 463435.9536(输入已知点Y坐标).第十一步:H=800(显示待求点所计算的里程桩号)..第十二步:S=0 (显示待求点所计算的距离左为“-”、右为“+”)第十三步:返回第九步.三.曲率判断方法1.直线段计算时: D=0:E=02.圆曲线段计算时:D=1÷R:E=1÷R(左“-”,右“+”)3.直缓段计算时: D=0:E=1÷R(左“-”,右“+”)4.缓直段计算时: D=1÷R:E=0(左“-”,右“+”)5.非完整型缓和曲线段计算时:D=1÷R1:E=1÷R2(左“-”,右“+”)H H(X、Y)N=1 时U ZCR纵向轴线横向轴线KPM=1M=-1M=OJS(J、P)N=2 时H UUw(L、N)起点(A,B)FD G E。
5800坐标高程计算程序
CASIO5800计算器公路测量计算程序程序设计:魏加训2009.2.28Casio 5800计算器数据库型万能坐标正反算计算程序一、主程序:1XYLbl 0:“1.ZS 2.FS”?→V↙If V=1: Then “CZ X” ?H: “CZ Y” ?T:Goto 1: Else If V=2: Then Goto 2 :IfEnd: IfEnd↙Lbl 1: “K××+×××”?D:?Z: “RJ”?G↙Prog “P.Z”↙(注:计算另一线路时修改替换此处和FS子程序中的P.Z为对应线路的数据库名称即可)Prog “ZS” ↙If Z<0: Then Cls:“X(L)=”: “Y(L)=”: Locate 6,1,X : Locate 6,2,Y◢Pol(X-H,Y-T): Cls: “S(L)=”: Locate 6,1,I : "F(L)=":360Frac((J+360)÷360▼DMS◢Goto 1:IfEnd↙If Z=0: Then Cls:“X(Z)=”: “Y(Z)=”: Locate 6,1,X : Locate 6,2,Y : “QXFWJ (Z)=”: 360Frac((J+360)÷360▼DMS◢Pol(X-H,Y-T): Cls: “S(Z)=”: Locate 6,1,I : "F(Z)=":360Frac((J+360)÷360▼DMS◢Goto 1:IfEnd↙If Z >0: Then Cls:“X(R)=”: “Y(R)=”: Locate 6,1,X : Locate 6,2,Y◢Pol(X-H,Y-T): Cls: “S(R)=”: Locate 6,1,I : "F(R)=":360Frac((J+360)÷360▼DMS◢Goto 1:IfEnd↙Lbl 2: 0→Z:0→G:”X” ?M:”Y” ?I:Prog “FS”: Cls:“K=”:“Z=”:Locate 4,1,D : Locate 4,2,Z◢Goto 2↙二、正算子程序:ZS5→N: U(E-1-R-1)÷Abs(K-F)→P: Abs(D-F)÷N→Q: 90Q÷π→S:(注:此处5→N是控制计算精度可修改的,一般取值为4~6即可)C+(NPQ+2UR-1)NS→J:1→L↙A+Q÷6×(Cos (C)+Cos (J) +4∑(Cos (C+((L+0.5)PQ+2UR-1)×(L+0.5)S),L,0,(N-1))+2∑(Cos (C+((LPQ+2UR-1)LS,L,1,(N-1)))+ZCos(J+G) →X :B+Q÷6×(Sin(C)+Sin( J) +4∑(Sin (C+((L+0.5)PQ+2UR-1)×(L+0.5)S),L,0,(N-1))+2∑(Sin (C+((LPQ+2UR-1)LS,L,1,(N-1)))+Z Sin(J+G)→Y ↙三、反算子程序:FSLbl 0:Prog “P.Z”:Prog “ZS”↙(注:计算另一线路时修改替换此处和1XY主程序中的P.Z为对应线路的数据库名称即可)(I-Y)sin(J)+(M-X) cos(J)→ P :D+P→ D ↙If Abs(P)≥0.001:Then Goto 0 : Else Goto 1 : IfEnd↙Lbl 1: (I-Y)cos(J)-(M-X) sin(J) →Z四、曲线元要素数据库格式If D≥线元起点里程:Then线元起点里程→F:线元终点里程→K:线元起点X坐标→A:线元起点Y坐标→B:线元起点切线方位角→C:线元起点半径→R:线元终点半径→E:线元转向(注:左-1,右+1,直线为0) →U: IfEnd↙五、曲线元要素数据库样例:P.ZIf D≥***:Then***→F:***→K: ***→A: ***→B: ***→C: ***→R: ***→E: ***→U: IfEnd↙If D≥***:Then***→F:***→K: ***→A: ***→B: ***→C: ***→R: ***→E: ***→U: IfEnd↙If D≥***:Then***→F:***→K: ***→A: ***→B: ***→C: ***→R: ***→E: ***→U: IfEnd↙...............…………………………………………………………If D≥***:Then***→F:***→K: ***→A: ***→B: ***→C: ***→R: ***→E: ***→U: IfEnd↙(注:如一条路有多个曲线元要素则按顺序排列依次添加入数据库P.Z中)六、程序说明:程序线元判断原则:(1) 以道路中线的前进方向(即里程增大的方向)区分左右;(2) 当所求点位于中线时,Z=0;当位于中线左侧时,Z取负值;当位于中线右侧时,Z取正值。
卡西欧fx-5800 坐标正算程序
卡西欧fx-5800 坐标正算程序“SO”算方位Lbl 0“D”:Pol(X-A,Y-B) →D◢If J≥0:Then J◢Else “J”:J+360◢IfEnd“ZZ”正算直线坐标A+Rec(Abs(P-K),Q) →XB+J→Y“X”:X+Rec(D,Q+N×90) →X◢“Y”:Y+J→Y◢P?所求桩号 A,B:起点x,y K:起点桩号 Q:方位角D:边桩距离 N?左偏“-1”右偏:“+1”X= Y= 所求点坐标“YY”正算圆曲线坐标Q+C×(P-K)÷S×180÷∏→Z“X”:A+C×S×(Sin(Z)-Sin(Q))+Rec(D,Z+N×90) →X◢“Y”:B-C×S×(Cos(Z)-Cos(Q))+J→Y◢P:所求点桩号 A,B:起点x,y K:起点桩号Q:方位角 S:曲线半径 D?边桩距离N?左偏“-1”,右偏“+1”X= y= 所算点坐标 C:线路左转“-1”右转“+1”“H1”正算缓和曲线坐标Abs(P-K) →LT2÷L→HL2×180÷∏÷2÷T2→VQ+C×V→ZL-L∧(3)÷40÷H2+L∧(5)÷3456÷H∧(4)-L∧(7)÷H∧(6)÷599040→EL2÷6÷H- L∧(4)÷336÷H∧(3)+ L∧(6)÷42240÷H∧(5)- L∧(8)÷H∧(7)÷(6×1612800)→FIf C<0:Then-F→F:IfEndA+E×Cos(Q)-F×Sin(Q) →X“X”:X+Rec(D,Z+M×N×90) →X◢B+E×Sin(Q)+F×Cos(Q) →Y“Y”:Y+J◢P?所求点桩号 A,B:起点x,y K:起算点里程桩号Q:前切线方位角 T(是圆曲线要素的A1)=√(根号)缓曲总长×半径C=切线线路方向左转“-1”,右转“+1“M=第一缓曲“+1”,第二缓曲”-1“N:算边桩左偏“-1”,右偏“+1”D:边桩距离坐标正算数据库例子“肇兴隧道右线数据库”Lbl 0“P”?P:“N”?N:“D”?DIf P≥16836.5 And P≤17009.624:Then 66881.803→A:14635.782→B:16836.5→K:280032030.50→Q:902.044→T:1→C: 1→M:Prog“H1”:IfEnd (第一缓曲线)If P≥17009.624 And P≤17529.681:Then 66914.52→A:14465.781→B:17009.624→K:281035049.370→Q:4700→S:Prog“YY”:IfEnd (圆曲线)If P≥17539.681 And 17702.805≥P:Then 67102.343→A:13799.117→B:17702.805→K:108059031.50→Q:902.044→T:-1→C: -1→M:Prog“H1”:IfEnd (第二缓曲线)If P≥17702.805 And P≤19550:Then 67102.343→A:13799.17→B:17702.805→K:288059031.50→Q: Prog“ZZ”:IfEnd (直线)。
卡西欧计算器程序
CASIO fx —5800 计算器工程测量与公路测量程序1、坐标正算"X0=″X:"Y0=″Y:"I= ″I:"J=″JX+ICos(J)→ U:Y+ISin(J)→ V"X=″:U (待求点的 X 坐标)"Y=″:V (待求点的 Y 坐标)说明: X0 Y0 :已知点坐标I:两点的距离J:方位角2、坐标反算Lbl 0"X1=″X:"Y1=″Y:"X2=″U:" Y2=″V?Pol(U-X,V-Y):?J<0 J+360→ J"I= ″:I"J=″:J DMSGOTO 0说明: X1Y1 :第一点的坐标,X2Y2 第二点的坐标,I:两点的距离,J:方位角3、圆曲线"X0=″X: "Y0=″Y:" FWJ=″D: " QDHAO=″G: " ZDHAO=″C: " R=″RLbl 1"DQHAO=″LL<G Or L > C GOTO 2"P Y=″K180(L- G)÷ ( π R) → E2RSin→ FReC(Abs(F),D+ :Cls"X=″:X+I+KCos(D+E+90) →A"Y=″:Y+J+KSin(D+E+90) →BD+E→ o:o<0 360+o→ 0o"F WJ=″:o? DMSGoto 1Lbl 2"END″说明: X0Y0 :起始点的坐标, FWJ:起始点的方位角, QDHAO :起点里程, ZDHAO 终点里程,R:半径, DQHAO :待求点里程, PY :偏移量4、竖曲线"QZHAO ″=J:"H+B″=B:"I1=″C:"I2=″D:"R=″R:"T=″T:((D-C)÷100)÷Abs((D- C)÷ 100)→ A:Abs(D-C)÷ 100)→ S"T″:SJ-T→ XJ+T→ YLbl 0"DQ=″LIf L<X:Then Goto 1:Else If? L>Y:Then Goto 1:If End:If End"GC=″:B+C(L -J)100+A(L÷- J+T)? ÷(2R) →HGoto 0Lbl 1"END″说明: QZHAO :曲中点里程, H+B :曲中点高程, I1:第一坡度, I2:第二坡度, R:半径,T:切线长, DQ:待求点里程。
CASIOfx计算器工程测量与公路测量程序
CASIO fx—计算器工程测量与公路测量程序CASIO fx—5800计算器工程测量与公路测量程序CASIO fx—5800计算器工程测量与公路测量程序1、坐标正算"X0=″?X:"Y0=″?Y:"I=″?I:"J=″?JX+ICos(J)→U:Y+ISin(J)→V"X=″:U (待求点的X坐标)"Y=″:V (待求点的Y坐标)说明:X0 Y0:已知点坐标I:两点的距离J:方位角2、坐标反算Lbl 0"X1=″?X:"Y1=″?Y:"X2=″?U:"Y2=″?VPol(U-X,V-Y):J<0 J+360→J"I=″:I"J=″:J DMSGOTO 0说明:X1Y1:第一点的坐标,X2Y2第二点的坐标,I:两点的距离,J:方位角3、圆曲线"X0=″?X: "Y0=″?Y:"FWJ=″?D:"QDHAO=″?G: "ZDHAO=″?C: "R=″?RLbl 1"DQHAO=″?LL<G Or L>C GOTO 2"PY=″?K180(L-G)÷(πR) →E2RSin(0.5E) →FReC(Abs(F),D+0.5E):Cls"X=″:X+I+KCos(D+E+90) →A"Y=″:Y+J+KSin(D+E+90) →BD+E→o:o<0 360+o→0o"FWJ=″:o DMSGoto 1Lbl 2"END″说明:X0Y0:起始点的坐标,FWJ:起始点的方位角,QDHAO:起点里程,ZDHAO终点里程,R:半径,DQHAO:待求点里程,PY:偏移量4、竖曲线"QZHAO =″?J: "H+B″=?B:"I1=″?C:"I2=″?D:"R=″?R:"T=″?T:((D-C)÷100) ÷Abs((D-C) ÷100)→A:Abs(0.5R(D-C) ÷100)→S"T″:SJ-T→XJ+T→YLbl 0"DQ=″?LIf L<X:Then Goto 1:Else If L>Y:Then Goto 1:If End:If End"GC=″:B+C(L-J) ÷100+A(L-J+T) ÷(2R) →HGoto 0Lbl 1"END″说明:QZHAO:曲中点里程,H+B:曲中点高程,I1:第一坡度,I2:第二坡度,R:半径,T:切线长,DQ:待求点里程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
程序:MC
W“1.JS 2.SZ”:W=1=>Z[2]=0:Goto 1 ΔW=2=> O“KOU LING”:O≠123456=>O= 0: “OUT” ◢Goto 5ΔO=0:Defm 42:Z[1]=0:Goto 0←┘
Lbi 0←┘
{ABCREFGU}:A“X0”:B“Y0”:C“F0”:R“R0”:E“RN”:F“D0”:G“LS”:U“G” ←┘
Z[Z[1]*8+3]=A:Z[Z[1]*8+4]=B:Z[Z[1]*8+5]=C:Z[Z[1]*8+6]=1÷R:Z[Z[1]*8+7]=1÷E:Z [Z[1]*8+8]=F: Z[Z[1]*8+9]=F+G: Z[Z[1]*8+10]=U←┘
A=0=> Z[2]=0:Goto 1ΔIsz Z[1]: Goto 0←┘
Lbi 1←┘
{DZ}:D:Z:Z[2]=0:Goto 2←┘
Lbi 2←┘
D≤Z[Z[2]*8+9]=>A=Z[Z[2]*8+3]:B=Z[Z[2]*8+4]: C =Z[Z[2]*8+5]:R=Z[2]*8+6]: E= Z[Z[2]*8+7]: F=Z[Z[2]*8+8]: G=Z[2]*8+9]: U=Z[Z[2]*8+10]: Goto3:ΔIsz Z[2]:Got o 2
Lbi 3←┘
P=U(E-R)÷Abs(G-F):Q=Abs(D-F):I=PQ:J=C+90 Q(I+2UR)/π:J<0=>J=J+360ΔM=C+45 Q(I÷4+2UR)÷2π:N=C+135Q(3I÷4+2UR)÷2π:K=C+45Q(I÷2+ 2UR)÷π:L=C+45Q(I÷8+2UR) ÷4π: S=C+135Q(3I÷8+2 UR) ÷4π: T=C+225Q(5I÷8+2UR) ÷4π: H=C+315Q(7I÷8+2UR) ÷4π←┘
Lbi 4
X=A+Q(Cos C+4(Cos L+ Cos S +Cos T+Cos H)+2(Cos M + Cos N+Cos K)+Cos J) ÷24+ZCos(J+90)←┘
Y=B+Q(Sin C+4(Sin L + Sin S + Sin T+ Sin H)+2(Sin M + Sin N+ Sin K) + Sin J) ÷24 +ZSin(J+90)←┘
Z=0=>“X”:X:Pause 0: “Y” :Y◢Goto 1Δ
Z<0=>“XL”:X:Pause 0: “YL”:Y◢Goto 1Δfx4850
Z>0=>“XR”:X:Pause 0: “YR”:Y ◢Goto 1 ←┘
Z=0=> X “X” ◢Y “Y”◢Goto 1Δ
Z<0=> X “XL” ◢Y “YL”◢Goto 1Δ fx4800
Z>0=> X “XR” ◢Y “YR”◢Goto 1 ←┘
Lbi 5←┘
二、变量及说明
X0:Y0:F0――――曲线元起点X、Y坐标及起点正切线方位角
R0:RN――――――曲线元起点及终点半径
D0:LS:Q―――曲线元起点桩号、路线长度及线路左右偏标志(左=-1,直线=0,右=1)
D――――――――曲线元中待求点桩号
Z―――――――――计算边桩距中线平距,左边输入负值,右边输入正值,中桩输入0
X:Y
XL:YL
XR:YR ―――――――待求点中边桩桩号的X,Y坐标
扩充变量:Z[Z[1]*8+3]: Z[Z[1]*8+4]: Z[Z[1]*8+4]: Z[Z[1]*8+6]: Z[Z[1]*8+7]: Z[Z [1]*8+8]: Z[Z[1]*8+9]: Z[Z[1]*8+10]: 分别为各线元X0:Y0:F0;R0:RN:D0:LS:Q,
(1) 以道路中线的前进方向(即里程增大的方向)区分左右;当线元往左偏时,Q=-1;当线元往右偏时,Q=1;当线元为直线时,Q=0。
(2) 当所求点位于中线时,Z=0,坐标显示X Y;当位于中线左侧时,Z取负值,坐标显示XL YL,;当位于中线右侧时,Z取正值,坐标显示XR YR。
(3) 当线元为直线时,其起点、止点的曲率半径为无穷大,以10的45次代替。
(4) 当线元为圆曲线时,无论其起点、止点与什么线元相接,其曲率半径均等于圆
弧的半径。
(5) 当线元为完整缓和曲线时,起点与直线相接时,曲率半径为无穷大,以1 0的45
次代替;与圆曲线相接时,曲率半径等于圆曲线的半径。
止点与直线相接时,曲率半
径为无穷大,以10的45次代替;与圆曲线相接时,曲率半径等于圆曲线的半径。
(6) 当线元为非完整缓和曲线时,起点与直线相接时,曲率半径等于设计规定的值;与圆曲线相接时,曲率半径等于圆曲线的半径。
止点与直线相接时,曲率半径等
于设计规定的值;与圆曲线相接时,曲率半径等于圆曲线的半径。
本程序可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距,对该曲线段范围内任意里程中边桩坐标进行正算。
本程序是运用复化辛普生公式以及对扩充变量的应用,实现了真正意义上的的全线贯通。
程序分为两部分:1为计算2为设置。
首先对内存变量进行扩充,为防止误操作在输入正确口令123456时方可进行设置。
可以根据内存容量输入无限多段线元要素,扩充变量个数根据输入线元段数进行调整。
在执行程序中将各个线元要素按规律输入到扩充内存变量中,在坐标计算时程序首先自动判断其在哪一线元内,并把其线元要素调出进行计算。
在进行计算时直接输入桩号、宽度就可以进行全线坐标计算。
本程序可在4800 4850上运行,只需将输出部分进行修改。
四、示例
郑石高速路面9标主线线元要素及相关数据如下:
X0 Y0 F0 R0 RN D0 LS Q
744450.244 510454.431 220º41 º31.8 º7000 7000 116075.889 338 6.293 1
742505.351 507722.676 248º24 º33.6 º1045 1045 119462.18
2 1980.825 0
741776.461 505880.832 248º24 º33.6 º 8500 8500 121443.007 1517. 999 1
741346.546 504427.086 258º38 º30.1 º 1045 1045 122961.007 1985.977 0
桩号宽度 X Y
117000 0 743791.308 509807.481
118000 -20 743164.306 509027.467
119000 20 742707.551 508137.935
119462.182 0 742505.351 507722.677
120000 -15.253 742293.265 507228.206 121000 15.260 741953.664 506287.142 121443.007 0 741776.460 505880.833 122000 -10.20 741578.903 505359.702 122961.007 50.355 741395.915 504417.169 123650 0 741210.853 503751.587。