根轨迹法
根轨迹法

根轨迹法一、定义:〈①〉()()()01111*0=+++=+∏∏==nj imi ip s z s Ks G 。
其中*K 为根轨迹增益。
开环放大倍数∏∏===nj jmi ipzKK 11*闭环特征方程的根随参数*K 而变化的轨迹,称为根轨迹。
其符合两个条件:()()()()⎪⎩⎪⎨⎧=∠+=∠=非最小相位系统或最小相位系统相角条件:幅值条件:,2,121000ππk s G k s G s G〈②〉几条规则:①实轴上的根轨迹〈最小相位系统〉右边有奇数个零极点时,有根轨迹 〈非最小相位系统〉右边有偶数个零极点时,有根轨迹 ②根轨迹条数=Max (n,m ),起点为开环极点(0=g K ),终点为开环零点(∞→g K )③渐进线条数:(n-m )条,与实轴交点坐标:mn --=∑∑零点极点1σ与实轴夹角:()mn k -+±=πϕ121。
④分离点与会合点:使0*=dsdK ,并使*K >0的点 ⑤复数极点出射角:∑∑-+︒=量辐角其他极点至该极点的向零点至极点的向量辐角1801p θ对非最小相位系统∑∑-='量辐角其他极点至该极点的向零点至极点的向量辐角1p θ 复数零点的入射角:∑∑+-︒=角极点至该零点的向量辐量辐角其他零点至该零点的向1801z θ对非最小相位系统∑∑+-='角极点至该零点的向量辐量辐角其他零点至该零点的向1z θ⑥与虚轴交点:(a )用劳斯判据确定,用辅助方程求得(b )ωj s =代入闭环特征方程,由实部=0,虚部=0求得例1:()()()210++=s s s Ks G解:渐进线(3条):()()10321-=--+-=σ,()πππϕ,3312=+±=k由()()0211=+++s s s K,则()()21++-=s s s K ,()()026323223*=++-=++-=s s dsss s d ds dK ,得 ⎩⎨⎧-=-==-=385.0,577.1385.0,423.0*22*11K s K s 与虚轴的交点:方法一02323=+++K s s s ,劳斯阵:Ks K sKs s 0123323021-要与虚轴有交点,则有一行全零,即6032=⇒=-K K辅助方程:j s s 20632,12±=⇒=+ 方法二将ωj s =代入特征方程:()()()02323=+++K j j j ωωω2,60320332==⇒=-=-ωωωωK K 虚部:实部:,则与虚部的交点6,22,1=±=K j s 根轨迹如下图例2:()()32220+++=s s s K s G 解:渐进线一条。
自动控制原理第四章根轨迹法
i 1
j 1
开环极点到此被测零点 (终点)的矢量相角
8. 根轨迹的平衡性(根之和) ( n-m 2)
特征方程 Qs KPs 0
sn an1sn1 a1s a0 K sm bm1sm1 b1s b0 0
n
Qs KPs s p j sn cn1sn1 c1s c0 0 j 1
i 1
j1
k 0,1,2,
s zoi i 开环有限零点到s的矢量的相角
s poj j 开环极点到s的矢量的相角
矢量的相角以逆时针方向为正。
幅值条件:
s
m
m
s zoi
li
A s
i 1 n
i 1 n
s poj
Lj
j 1
j1
li αi
-zoi
Lj βj
×
-poj
开 环 有 限 零 点 到s的 矢 量 长 度 之 积 开环极点到s的矢量长度之积
, 2 2
c 2k 11800 2
由此可推理得到出射角:
其余开环极点到被测极 点(起点)的矢量相角
n1
m
c 2k 1180o j i
j 1
i 1
有限零点到被测极点
(起点)的矢量相角
同理入射角:
其余开环有限零点到被测 零点(终点)的矢量相角
m1
n
r 2k 1180o i j
1 GsHs 0
m
GsHs
KPs Qs
K
i 1
n
s
s
zoi
poj
j 1
P s sm bm1sm1 b1s b0
Q s sn an1sn1 a1s a0
于是,特征方程
第四章根轨迹法

系统得闭环根轨迹图。
j
已知负反馈系统开环零极点 分布如图示。
2 p2
在s平面找一点s1 ,
1
画出各开环零、极点到 z1
s1
1
p1 0
s1点得向量。
3
检验s1就是否满足相角条件: p3
(s1 z1) [(s1 p1) + (s1 p2) + (s1 p3)]
= 1 1 2 3 = (2k+1) ??
点,称为根轨迹得分离点(会合点)。
Kg=0 p1
j
j1
Kg A
Kg z1
0
p2 Kg=0
分离点得性质:
1)分离点就是系统闭环重根; 2)由于根轨迹就是对称得,所以分离点或位于实轴上,或 以共轭形式成对出现在复平面上; 3)实轴上相邻两个开环零(极)点之间(其中之一可为无穷 零(极)点)若为根轨迹,则必有一个分离点;
n
m
(s p j ) K g (s zi ) 0
j 1
i 1
d
ds
n j 1
(s
pj)
Kg
d ds
m
(s zi ) 0
i 1
d n
ds j1
n
(s
pj)
dm
ds i1
m
(s zi )
(s pj ) (s zi )
j 1
i 1
(lnV ) V V
n
m
d ln (s pj ) d ln (s zi )
如果s1点满足相角条件,则就是根轨迹上得一点。寻找
大家学习辛苦了,还是要坚持
继续保持安静
在s 平面内满足相角条件得所有s1 点,将这些点连成光滑曲 线,即就是闭环系统根轨迹。
第四章控制系统的根轨迹法

应掌握的内容
180度,0度根轨迹的绘制 参数根轨迹的绘制 增加开环零、极点对根轨迹和系统性能的影响 分析系统的稳定性 分析系统的瞬态和稳态性能 对于二阶系统(及具有闭环主导共轭复数极点的高阶 系统),根据性能指标的要求在复平面上划出满足这一 要求的闭环极点(或高阶系统主导极点)应在的区域。
10
[例4-1]系统的开环传递函数为:Gk (s)
由根轨迹图可知,当0 k 0.858时,闭环系统有一对
不等的负实数极点,其瞬态响应呈过阻尼状态。当 0.858 k 29.14 时,闭环系统有一对共轭复数极点,其瞬 态响应呈欠阻尼状态。当29.14 k 时,闭环系统又有一 对不等的负实数极点,瞬态响应又呈过阻尼状态。
14
[例4-3]控制系统的结构图如下图所示。试绘制以a为参变 量时的根轨迹。
解得 k 5, 5 由图可知当k 5 时直线OB与圆相切,系统的阻 尼比 1 ,特征根为 5 j5 。
2
13
对于分离点 2.93 ,由幅值条件可知
2.93 5 2.93 k1 10 2.93 0.858
对于会合点17.07 ,有
45
17.07 5 17.0 k2 10 17.07 29.14
论过,利用根轨迹可清楚地看到开环根轨迹增益或其他参 数变化时,闭环系统极点位置及其瞬态性能的改变情况。
利用根轨迹确定系统的有关参数 对于二阶系统(及具有闭环主导共轭复数极点的高阶系 统),通常可根据性能指标的要求在复平面上划出满足 这一要求的闭环极点(或高阶系统主导极点)应在的区 域。如下页图所示,具有实部 和阻尼角 划成的左区域 满足的性能指标为:
17
例4-4(续2)
其分离回合点计算如下:
N(s) s2 3s, N ' (s) 2s 3
自动控制原理第四章根轨迹法

第四章 根轨迹法
第一节 根轨迹与根轨迹方程 根轨迹 系统的某个参数(如开环增益K)由0到∞变化时, 闭环特征根在S平面上运动的轨迹。
例: GK(S)= K/[S(0.5S+1)] = 2K/[S(S+2)] GB(S)= 2K/(S2+2S+2K) 特征方程:S2+2S+2K = 0
-P1)(S-P2)…(S-Pn)
单击此处可添加副标题
当n>m时,只有m条根轨迹趋向于开环零点,还有(n-m)条? m,S→∞,有: (S-Z1)(S-Z2)…(S-Zm) -1 -1 ———————-— = —— = —— P1)(S-P2)…(S-Pn) K* AK 可写成:左边 = 1/Sn-m = 0 当K=∞时,右边 = 0 K=∞(终点)对应于S→∞(趋向无穷远). 即:有(n-m)条根轨迹终止于无穷远。
分解为:
03
例:GK(S)= K/[S(0.05S+1)(0.05S2+0.2S+1)] 试绘制根轨迹。 解: 化成标准形式: GK(S)= 400K/[S(S+20)(S2+4S+20)] = K*/[S(S+20)(S+2+j4)(S+2-j4)] K*=400K——根迹增益 P1=0,P2=-20,P3=-2+j4,P4=-2-j4 n=4,m=0
一点σa。
σa= Zi= Pi
ΣPi-ΣZi = (n-m)σa
σa= (ΣPi-ΣZi)/(n-m)
绘制根轨迹的基本法则
K*(S-Z1)(S-Z2)…(S-Zm)
—————————— = -1 (S-P1)(S-P2)…(S-Pn)
根轨迹法
根軌跡法根軌跡法概述在時域分析中已經看到,控制系統的性能取決於系統的閉環傳遞函數,因此,可以根據系統閉環傳遞函數的零、極點研究控制系統性能。
但對於高階系統,採用解析法求取系統的閉環特征方程根(閉環極點)通常是比較困難的,且當系統某一參數(如開環增益)發生變化時,又需要重新計算,這就給系統分析帶來很大的不便。
1948年,伊万思根据反馈系统中开、死循环传递函数间的内在联系,提出了求解死循环特征方程根的比较简易的图解方法,这种方法称为根轨迹法。
因为根轨迹法直观形象,所以在控制工程中获得了广泛应用。
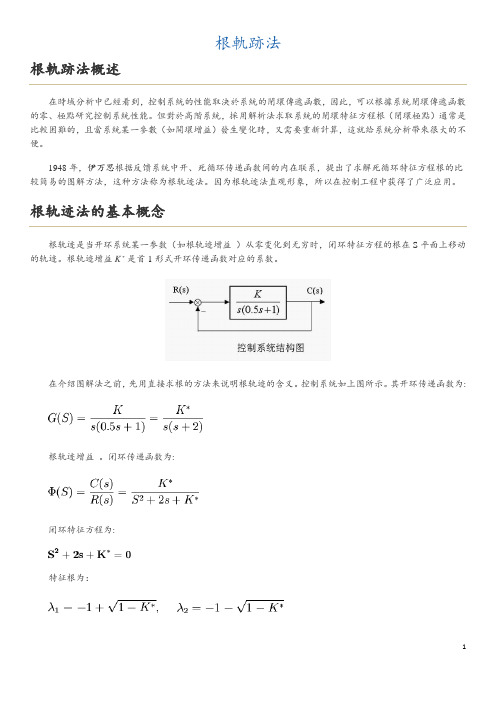
根轨迹法的基本概念根轨迹是当开环系统某一参数(如根轨迹增益)从零变化到无穷时,闭环特征方程的根在S平面上移动的轨迹。
根轨迹增益K * 是首1形式开环传递函数对应的系数。
在介绍图解法之前,先用直接求根的方法来说明根轨迹的含义。
控制系统如上图所示。
其开环传递函数为:根轨迹增益。
闭环传递函数为:闭环特征方程为:特征根为:当系统参数K * (或K)从零变化到无穷大时,闭环极点的变化情况见下表:利用计算结果在S平面上描点并用平滑曲线将其连接,便得到K * (或K)从零变化到无穷大时闭环极点在S平面上移动的轨迹,即根轨迹,如下图所示。
图中,根轨迹用粗实线表示,箭头表示K * (或K)增大时两条根轨迹移动的方向。
根轨迹与系统性能依据根轨迹图(见系统根轨迹图),就能分析系统性能随参数(如K * )变化的规律。
1.稳定性开环增益从零变到无穷大时,如系统根轨迹图所示的根轨迹全部落在左半s平面,因此,当K>0时,如图控制系统根所示系统是稳定的;如果系统根轨迹越过虚轴进入右半s平面,则在相应K值下系统是不稳定的;根轨迹与虚轴交点处的K值,就是临界开环增益。
2.稳态性能由系统根轨迹图可见,开环系统在坐标原点有一个极点,系统属于Ⅰ型系统,因而根轨迹上的K值就等于静态误差系数K v。
当r(t)=1(t)时,e ss = 0;当r(t)=t时,3.动态性能由系统根轨迹图可见,当0 <K< 0.5时,闭环特征根为实根,系统呈现过阻尼状态,阶跃响应为单调上升过程;当K=0.5时,闭环特征根为二重实根,系统呈现临界阻尼状态,阶跃响应仍为单调过程,但响应速度较0 <K< 0.5时为快;当K>0.5时,闭环特征根为一对共轭复根,系统呈现欠阻尼状态,阶跃响应为振荡衰减过程,且随K增加,阻尼比减小,超调量增大,但t s基本不变。
根轨迹法(自动控制原理)

i1
l 1
nm
规则4:实轴上的根轨迹
➢ 实轴上的开环零点和开环极点将实轴分为若干段,对其中任一段,如果其右
边实轴上的开环零、极点总数是奇数,那么该段就一定是根轨迹的一部分。
❖ 该规则用相角条件可以证明,设实轴上有一试验点s0。 ➢ 任一对共轭开环零点或共轭极点(如p2,p3),与其对应的相角(如θ2,θ3)
第四章 根轨迹法
4.1 根轨迹的基本概念 4.2 绘制典型根轨迹 4.3 特殊根轨迹图 4.4 用MATLAB绘制根轨迹图 4.5 控制系统的根轨迹分析
内容提要
➢ 根轨迹法是一种图解法,它是根据系统的开环零 极点分布,用作图的方法简便地确定闭环系统的 特征根与系统参数的关系,进而对系统的特性进 行定性分析和定量计算。
规则3:渐近线
❖ 当n>m时,根轨迹一定有n-m支趋向无穷远;当n<m时,根轨迹一定有m-n支 来自无穷远。可以证明:
➢ 当n≠m时,根轨迹存在|n-m|支渐近线,且渐近线与实轴的夹角为:
所有渐近线交于k实轴上(2的k一n点1,)m1其8坐00标,为 k 0,1,2,,| n m | 1
n
m
pi zl
之和均为360°,也就是说任一对共轭开环零、极点不影响实轴上试验点s0的相 角条件。
➢ 对于在试验点s0左边实轴上的任一开环零、极点,与其对应的相角(如θ4,φ3) 均为0。
➢ 而试验点s0右边实轴上任一开环零、极点,与其对应的相角(如θ1,φ1,φ2) 均为180°。
所以要满足相角条件,s0右边实轴上的开环零、极点总数必须是奇数。
❖ 1948年伊凡思(W.R.Evans)提出了根轨迹法,它不 直接求解特征方程,而用图解法来确定系统的闭环 特征根。
第4章 根轨迹法

时,由根轨迹方程知根轨迹的终点为
,即系统的开环零点。
但是,当
时,
条根轨迹趋向于开环零点(称为有限零点),还有
条根轨迹将趋于无穷远处(称为无限零点)。
如果出现
的情况,必有
条根轨迹的起点在无穷远处。
规则2 根轨迹的分支数、对称性和连续性根轨迹的分支 数等于 , 根轨迹对称于实轴并且连续变化。
由根轨迹的对称性和连续性,根轨迹只需作出上半部分,对称画出另一部分,且根轨迹连续变化。
规则3 根轨迹的渐近线 当开环极点数大于开环零点数时,有n-m条根轨迹 趋于无穷远处,无穷远处的渐近线与实轴的交点为 , 渐近线与实轴正方向的夹角(倾角)为
例4-1单位负反馈系统的开环传递函数为
规则10 根之积 根据特征方程根和系数的关系,得
第1章 引 论
例:系统的开环传递函数为
开环极点为
渐近线于实轴的交点为
渐近线的倾角为
与虚轴的交点为
第1章 引 论
根轨迹的分会点:
第1章 引 论
第1章 引 论
第1章 引 论
例:系统的开环传递函数为
开环极点为
渐近线于实轴的交点为
4.6 MATLAB绘制系统的根轨迹 对于比较复杂的系统,人工绘制根轨迹十分复杂和困难,MATLAB绘制系统根轨迹是十分方便的。 通常将系统的开环传递函数写成如下形式
分别为分子和分母多项式。
采用MATLAB命令: pzmap(num,den)可以绘制系统的零、极点图; rlocus(num,den)可以绘制系统的根轨迹图; rlocfind(num,den)可以确定系统根轨迹上某些点的增益。
渐近线的倾角为
与虚轴的交点为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
与虚轴交点求法(续)
方法二:利用劳斯表,令相应行所有元素值 为0解得kc值,代入辅助方程求得值。 例6.5负反馈系统开环传递函数如下,求根轨 迹与虚轴的交点及kc 。 k G( s) 2 s( s 2.73)(s 2s 2) 解:由G(s)知系统特征方程为 2 s(s 2.73)(s 2s 2) k 0
连续与离散控制系统
第6章 根轨迹法
主要内容
• • • • • • • 基本概念 绘制根轨迹图的基本规则 绘制根轨迹图 参数根轨迹 开环零极点对根轨迹的影响 利用根轨迹法进行系统性能分析 利用根轨迹法校正
6.1基本概念
• 美国人W.R.EVANS于1948年提出根轨迹法。 它利用图解法而不是代数法求解控制系统 的闭环特征方程的根即闭环极点。 • 当控制系统的某一参数变化时,根据已知 的开环传递函数的极点和零点,利用几条 简单规则,绘制闭环系统的特征根的轨迹。 • 根轨迹法的最重要的价值在于它的图解思 想、控制系统整体感及隐藏在绘制规则背 后的规律,使控制工程师能够对控制系统 有深入的理解。
– 如果两端点为异性奇点。
• 如果没有与实轴的交点,则它为一个完整的分支, 即起始于开环极点,沿实轴运动直至该零点。 • 如果存在会合点,那么一定要有一个分离点也存在。
求根轨迹分离(会合)点的方法
方法一:
k ( s 1)
1 1 方法二: d P d Z j i j 1 i 1
Z 135
2
规则八:与虚轴的交点及临界值kc
• 根轨迹与虚轴的交点是为了研究是否有不 稳定的情况发生。与虚轴有交点就说明当k 值变化到这个值(称为临界k值,记为kc)时 将有一对共轭虚闭环极点存在,将产生等 幅振荡。 求与虚轴交点有两种方法:
方法一:令s=jω,带入系统特征方程 Re[1 G ( j )] 0 1 G ( j ) 0 Im[1 G ( j )] 0
G (s) s ( s 1)
2
解:令s=jω带入系统特征方程 3 2.1k 0 (1) 2 (2) (1 k ) 0.2k 0
由(1)得 由(2)得
2.1k
2
kc -0.9
由于k由0→+∞,故根轨 迹与虚轴无交点。
规则九:根轨迹系数k的求取
根轨迹的渐近线(续)
只要系统的n-m相同,其夹角是相同的,只是 不同的系统σ不同。下面给出常见情况的渐近 线形式。
规则五:实轴上的根轨迹
如果实轴上有开环零点或极点,则要研究根 轨迹在实轴上的情况,称为实轴上的根轨迹。 实轴上的奇点将整个实轴分割成若干段,每 段作一个开区间,记为 (a,b)(包括实轴上无 穷远点),则: 区间(a,b)右侧实轴上奇点总数若为奇数则该区 间在根轨迹上。若为偶数,则该区间上无闭环 极点。
满足角条件,故s1在根轨迹上,则k为:
3 2 2 3 12
6.3绘制根轨迹图
1. 2. 3. 4. 5. 6. 7. 8. 9. 获取系统的开环传递函数; 将开环零、极点绘于S平面; 确定实轴上的根轨迹; 确定有无与实轴交点,有则求出; 确定渐近线条数及渐近线交点,渐近线与实轴夹角 并绘出渐近线; 确定是否需要求取出射角和入射角,需要则求出; 求与虚轴交点及kc; 画出根轨迹各分支图; 需要求出的k值给予求取。
• • • • • • • • • 规则一:根轨迹的分支 规则二:根轨迹的连续性和对称性 规则三:根轨迹的起点和终点 规则四:根轨迹的渐近线 规则五:实轴上的根轨迹 规则六:根轨迹与实轴的交点 规则七:根轨迹的出射角与入射角 规则八:根轨迹与虚轴的交点及临界值kc 规则九:根轨迹系数k的求取
规则一:根轨迹的分支
规则三证明(续)
将特征方程改写为如下形式 m 1 n s Pj s Zi 0 k j 1 i 1 当根轨迹增益k=∞时,有
s Zj
j 1, 2,
, m
所以根轨迹终于开环零点。 一般系统总有n>m,只有s→∞时原式→0,故 在无穷远处为零点。
规则四:根轨迹的渐近线
设sl是根轨迹上的点,则对应的k值记为
例6.7负反馈系统开环传递函数如下,复平面 上点s1 1 j 3 是闭环极点吗?若是其对 k 应k值为何? G (s) ( s 1)( s 2)( s 4)
根轨迹系数k的求取举例
解:画零极点分布图 求s1与开环零极点的 幅角代数和
[(s1 P 1 ) (s1 P 2 ) (s1 P 3 )] [90 60 30] 180
(Z
i 1 ih
h
Z i ) (2l 1)
先异后同再反相!
入射角与出射角的计算举例
例6.4已知开环传递函数,求出射角和入射角。
G( s) k ( s 1)( s 4s 5) s( s 4)( s 2 s 9)
2
解:由G(s)知:Z 1 1, Z2 2 j, Z3 2 j
与虚轴交点求法举例一(续1)
Re[1 G(s)] 4 7.46 2 k 0 3 Im[ 1 G ( s )] 4 . 73 5.46 0
5.46 1.07 解得 2 4.73
(1) (2)
kc 7.28
1 4.73 7.46 5.46 k
(-∞, P4)
(P4, Z1)
规则六:根轨迹与实轴的交点
• 如果某区间是实轴上的根轨迹,则有三种 运动情况:
– 如果两端点为同性奇点,又分为两种情况。
• 同为开环极点,两个分支在k=0时分别从两个端点 出发,然后相向运动。他们只能在某一点相遇且自 此分开进入复平面去找零点,故称该点为分离点。 • 第二种情况是同为开环零点,一定有一个会合点。
• 根轨迹在s平面上的分支数等于控制系统特 征方程式的阶次,即等于闭环极点数目, 也等于开环极点数目。
规则二:连续性和对称性
• 连续性:由于k从0→∞连续变化时,特征方 程式根的变化也必然是连续的,故根轨迹 必然是连续的。 • 对称性:因为闭环特征方程式的根只有实 根和复根两种,实根位于实轴上,复根必 共轭,因此根轨迹对称于实轴。
模条件和角条件
设控制系统的开环传递函数为G(s),则其特 征方程为: 1+ G(s)=0 ,则G(s)= -1=ej(2l+1)π 模条件 | G ( s) | 1 角条件 G(s) (2l 1) , l为整数
G (s)
k (s Zi ) ( s Pj )
j 1
标准形式
明规则五
2
P2
j
3 0
Z3
4 0
P4 s0
2 1 1
Z2 P1 Z1
3
P3
s0 是实轴上的任意测试点;φ 是开环零点到s0 的相角;θ 是开环极点到s0的相角,所有角度 都是以水平线开始,逆时针方向测得的。
实轴上根轨迹举例
例6.1某负反馈系统实轴上的开环零、极点如 图所示,试确定其实轴上的根轨迹。 解:注意原点处为两 个开环极点。 (P1,+∞) (P2, P1) (Z1, P2)
(d 1)(d 1 j 3 d 1 j 3) (d 1 j 3)(d 1 j 3)
(d 1)(2d 2) d 2d 4
解得相同结果
根轨迹与实轴交点举例二
例6.3已知开环传递函数,求其与实轴的交点。
k ( s 6) G (s) s ( s 2)( s 60)
n
m
例6.2已知开环传递函数,求其与实轴的交点。
G (s) s 2 2s 4
解:依据G(s)将开环零、 极点画于S平面如图
例6.2(续1)
根据方法一得:
d 2 2d 4 (d 1)(2d 2) 0
解得 d1,2 1 3
舍去不在根轨迹上的点 1 1 1 根据方法二得: d 1 j 3 d 1 j 3 d 1
1 35 1 35 P1 0, P2 4, P3 j , P4 j 2 2 2 2
由于存在复极点P3,P4故应求出射角。由于存 在复零点Z2,Z3故应求入射角。
入射角与出射角的举例(续1)
( P3 Z1 ) 80.4
( P3 Z 2 ) 52.5
根轨迹和根轨迹图
• 根轨迹:特征方程的根(闭环极点)随参 数变化的运动轨迹。 • 根轨迹图:根轨迹的图像。 • 根轨迹法:根据根轨迹图对系统进行分析 和综合的一种近似方法。 • 标准根轨迹图:以根轨迹系数k为参数,以 开环传递函数为依据所绘制的根轨迹图。 • 参数根轨迹图:以k以外的参数(如时间常 数T)绘制的根轨迹图 。
规则三:根轨迹的起点和终点
根轨迹的一个分支一定起始于某个开环极点 而终止于某个开环零点。 证明:设闭环控制系统的特征方程为
s P k s Z 0
j 1 j i 1 i
n
m
当根轨迹增益k=0时,有
s Pj
j 1,2,
, n
可见,闭环特征方程的根就是开环极点,所 以根轨迹起于开环极点。
根轨迹的渐近线是当开环零点数目m小于开环 极点数n时,确定(n-m)条根轨迹沿什么方向趋 于[s]平面的无穷远处。渐近线是指向无穷远 n m 处的射线。
j i
渐近线与实轴的交点:
Re( P ) Re(Z )
j 1 i 1
nm
渐近线与实轴正方向的夹角:
(2l 1) , l 0,1,, (n m) 1 nm
k和K的关系
开环传递函数为时间常数表达形式:
( s 1) ( G (s) (T s 1) (T s K