根轨迹分析法 参考答案
第四章根轨迹法4-2

P( s )Q( s ) P( s )Q( s ) 0
即 其中
P( s ) Q( s ) P( s ) Q( s )
d [ln P(s)] d [ln Q(s)]
ds
ds
P(s) (s z1 )(s z2 ) (s zm )
Q(s)- (s p1 )(s p2 ) (s pn )
的 j 值。工作在此点时,系统处于临界稳定状态。
介绍二种常用的求交点的方法。 (1) 利用特征方程求取。用 j 替代s,令虚部、实部分别等
于 零,求得 和对应的K1。 (2) 利用劳斯表求取。将劳斯表中s2行系数构造的辅助方程
求得。若根轨迹与虚轴的交点多于两个,则应取劳斯 阵列中大于2的偶次方行的系数构造的辅助方程求得。
i1
ib
8 虚轴交点 (1)满足特征方程 1 G( j)H( j) 0 的 j 值;
(2)由劳斯判据求临界稳定时的特征根;
9
根之和与 根之积
n
pcj
n
p
j
j 1
j 1
n
j 1
pcj
1
n
n
j 1
pj
K1
m
i 1
zi
19
例1: 系统的开环传递函数 试画根轨迹。
G(s)H(s)
K1
s(s 4)(s 6)
ω4 -36ω2 K0 jω80 - 8ω2 0
ω4 -36ω2 K0 0
jω80 - 8ω2 0
求得 ω 10 , K0 260
( (4)出射角
极点-p3的出射角 : 3 180 (2k 1) (2 90 180 2 ) 90
同理不难求得极点-p4处的出射角: 4 90
自动控制第四章 根轨迹法 复习资料

第四章 根轨迹法一、填空选择题(每题2分)1、根轨迹起于开环 点,终于开环 点。
2、根轨迹对称于s 平面 轴。
3、控制系统的根轨迹是指系统中某一或某些参数变化时,系统的 在s 平面上运动后形成的轨迹。
4、假设某一单位负反馈控制系统的开环传递函数为1)2()(++=s s K s G ,若此时闭环极点为-1.5时,试问此时对应的开环放大系数是 。
5、如果闭环系统的极点全部分布在s 平面的 平面,则系统一定稳定。
6、系统的开环传函为G(s)H(s)=)4(3+s s K,则实轴上的根轨迹范围是( )。
A.[-∞, -4] B.[-4, 0] C.[0, 4] D.[4, ∞]根轨迹填空题答案1、根轨迹起于开环 极 点,终于开环 零 点。
2、根轨迹对称于s 平面的 实 轴。
3、控制系统的根轨迹是指系统中某一或某些参数变化时,系统的 特征方程的根 或 系统闭环极点 在s 平面上运动后形成的轨迹。
4、假设某一单位负反馈控制系统的开环传递函数为1)2()(++=s s K s G ,若此时系统的闭环极点为-1.5时,试问此时对应的开环放大系数是 1 。
5、如果闭环系统的极点全部分布在s 平面的 左半 平面,则系统一定稳定。
6、B二、综合计算题及参考答案a1、(8分)设系统结构图与开环零、极点分布图如下图所示,试绘制其概略根轨迹。
解:8’(按规则分解)a2、(12分)已知某系统开环零、极点分布如下图所示,试概略绘出相应的闭环根轨迹图。
cbad解:每项三分cbadb1、(10分)单位负反馈控制系统的开环传递函数为15.0)15.0()(2+++=s s s K s G 试绘制闭环系统的根轨迹。
并求分离点或会合点。
解:G(s)的零、极点标准形式为)1)(1()2()(j s j s s K s G -++++=因此该系统的开环零点为(-2,0)、开环极点为(-1,j ±),因此该系统有两条根轨迹分支,并且起于两个开环极点,终于开环零点(-2,0)和无限零点。
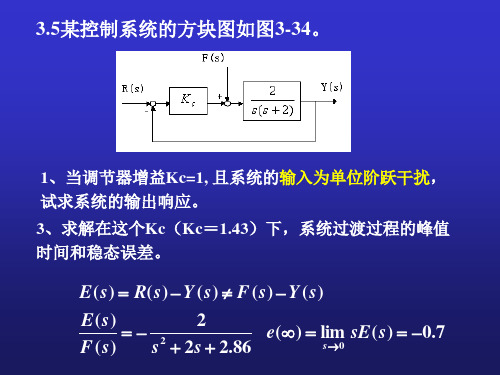
控制系统的根轨迹法分析
令实部和虚部分别为零,有
σ(25σk5)1k0k。 00
解得
k5,5
由图可知,当k=5时直线OB与圆相切,系统的阻尼比
特征根为
5 j5
,
1 2
(3)对于分离点-2.93,由幅值条件可知
k1
2.9 3|52.93| 0.858 |102.93|
对于会合点-17.07,有
由根轨迹图可知,当
k21.70 |1 70 |5 1.7 1 0.7 7 |07 |2.914
四、开环极点对系统根轨迹的影响
设系统的开环传递函数
GK(s)s(sK gp1) (p10)
其对应的系统根轨迹如图 a)所示。
若系统增加开环极点,开环传递函数变为
G K(s)s(spK 1)gs(p2) (p2p1)
其相应的根轨迹如图 b)所示。
五、控制系统的稳态性能分析
系统的稳态误差大小与系统的开环增益成反比,开环增益与根轨迹增益之 间又有确定的比例关系,即
jω
3
10
-1 0
σ
-3
若在该区域内没有合适的根轨迹,则应在系统中加入极点、零点合适的校正 装置以改变根轨迹的形状,使根轨迹进入该区域。然后确定满足要求的闭环极点
例:单位反馈控制系统的开环传递函数为
K G(s)
K s(s4)(s6)
若要求闭环系统单位阶跃响应的最大超调量 σ%≤18%,试确定系统的开环增益。 解:绘出 K由零变化到∞时系统的根轨迹如图所示。当K=17时,根轨迹在实轴
% 12 10% 0
3 t
s
n
可得到系统工作在该点的暂态性能。反过来,我们也可以根据系统暂态指标的
要求,确定系统特征根的位置。
第四章 根轨迹分析法 2

4. 牛顿余数定理
(1)求出表达式 Ps D(s)N(s) N(s)D(s)
(2)分析根轨迹,估计在其分离点(或会合点)可能出现的实轴 坐标附件找一个试探点 s1。
(3)用 s s1 去除 Ps ,得出商多项式 Qs 及余数,该余数记
为 R1 ;
(4)再用 s s1 去除商多项式 Qs,得第二个余数,定义为 R2 ;
s2 3
k gp
s1 6-kgp 3
s0 kgp
令 6-kgp 3
0 kgp
6
由辅助方程求交点坐标:
3s2 Hale Waihona Puke 6 0s1,2 2 j
法则10 闭环极点的和与积
若n-m>=2,则有
n
n
(sj ) ( pj ) const
j1
j1
证明:
开环传递函数:
m
根轨迹的入射角:终止于开环零点的根轨迹在终点出的切线同正 实轴的夹角。
j
[s]
p1 p1 z1
z1
0 z2
z2 p2 p2
m
n
先求出射角: (s zi ) (s pj ) 180o (2k 1)
i 1
j 1
• s1 →-p1则 0, (s1 pa ) a
1802k 1 (180 arctan1) arctan 1 90 71.6
j
2
p4 p3 71.6
7) 根轨迹同虚轴的交点:
-p3
1.1j
p3
j
特征方程 s4 5s3 8s2 6s kg 0
令s j
-p2 s1
-3
自动控制原理简明教程 第四章 根轨迹法 习题答案
方程求得。
k* 2 3 3
2
1
2 3 2 2 3 1
解得: k* 3(3 3)
1 3
特征根s=0处对应的 k * 值也利用模值方程求得:
k* 3 2 2 1
1
k*
4 3
满足稳定性时,k* 4 要使系统的三个根均为负
实根,则:
3
k* 4 3
0 k* 3(3 3) 1 3
0 k*
另一个闭环极点为 S3 ,则
(S S3 )(S 1)2 S (S 3)2 4
则解得:
(S S3 )(S 1)2 S (S 1)2 4(S 1)2 (S 4)(S 1)2
则 (S S3) S 4 S3 4 (另外一个闭环极点) 临界阻尼时的闭环传递函数为
(S)
(S
4(S 1) 4)(S 1)2
(2
j) (2 3
j)
4 3
渐近线与实轴正方向夹角
a
(2k 1)
nm
,
3
分离点: 1 1 1 0
d d 2 j d 2 j
整理得:3d 2 8d 5 0
解得:d1,2
8 6
2
d1 1 d2 1.67
分离角
l
180 l
180 2
900
把 S j 代入特征方程:
1
k*
n
m
a
i 1
Pi Zi
i 1
nm
(3) (3) 3
2
渐近线与实轴正方向夹角:
a
(2k 1)
nm
, ,
33
分离点: 1 1 1 0
d d 3 d 3
解得:d 1, a S (S 3)2 (1) 4 4
第四章 根轨迹分析法
奇数个π,无论如何加减组合,总能 使(2k+1) π(k=0, ±1, ±2,…)成立。
规则四、实轴上的根轨迹:在实轴上某线段右侧的实数 开环零、极点个数之和为奇数,则该线段为根轨迹。
对于例题,在实轴上的根轨迹: G(s)H(s) K(s 5)
一条始于开环极点,止于开环零点,
s(s 1)(s 2)
p3
)
k
0,
1,
2,
要判断 p3和 z1之间的线段是否存
在根轨迹,取实验点 S0 ,
× P4
开环共轭极点和零点提供的相角
4
相互抵消,G(s0)的相角由实轴上的 开环零极点决定。
● ● × ××
﹣5 S 0 ﹣2 ﹣1 0
处在G(s0)左边的开环零极点提供的角度 ×5 均为零, 相角条件由其右边的零极点决定。 P5
(s pn)]
(2k 1)1800
k 0, 1, 2,
幅值条件 (积的模等于模的积,商的模等于模的商)
K s p1 s p2 s pn s z1 s z2 s zm
相角条件 [(s z1) (s z2 ) (s zm )]
[(s p1) (s p2 ) (s pn )] (2k 1)1800
总结:
-
1
K
s(s 1)
G(s)H(s) K
s(s 1)
这是个?2 阶系统,有两个闭环极点,有2条根轨迹。
根轨迹是从开环极点出发点。
根轨迹上的点与K值一一对应。根轨迹是连续的。
Im
通过选择增益K,可使闭环极点落 在根轨迹的任何位置上。
如果根轨迹上某一点满足动态特 性要求,可以计算该点的K值实现 设计要求。
闭环特征方程1 G(s)H(s) 1 K (s 5) 0 s(s 1)(s 2)
根轨迹法习题及答案

第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4)(2)(1()()(*+++=s s s K s H s G 试证明点311j s +−=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点在根轨迹上,则点应满足相角条件1s 1s π)12()()(+±=∠k s H s G ,如图解4-1所示。
对于31j s +−=,由相角条件=∠)()(11s H s G=++−∠−++−∠−++−∠−)431()231()131(0j j jππππ−=−−−632满足相角条件,因此311j s +−=在根轨迹上。
将代入幅值条件:1s 1431231131)(*11=++−⋅++−⋅++−=j j j K s H s G )(解出 : 12*=K , 238*==K K4-2 已知开环零、极点如图4-22所示,试绘制相应的根轨迹。
1(e) (f) (g) (h) 题4-22图 开环零、极点分布图解 根轨如图解4-2所示:4-3 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。
⑴ )15.0)(12.0()(++=s s s Ks G⑵ )3)(2()5()(*+++=s s s s K s G⑶ )12()1()(++=s s s K s G2解 ⑴ )2)(5(10)15.0)(12.0()(++=++=s s s Ks s s K s G系统有三个开环极点:,01=p 22−=p ,53−=p① 实轴上的根轨迹:,(]5,−∞−[0,2−]② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=−=−−=πππϕσ,33)12(373520k a a③ 分离点:021511=++++d d d 解之得:,(舍去)。
88.01−=d 7863.32−d ④ 与虚轴的交点:特征方程为010107)(23=+++=k s s s s D 令 ⎩⎨⎧=+−==+−=010)](Im[0107)](Re[32ωωωωωj D k j D 解得⎩⎨⎧==710k ω 与虚轴的交点(0,j 10±)。
第八章 根轨迹法

p3 -2
p2 -1
σα
0
p1
故三条根轨迹趋向无穷远处,其渐近线与实 -60° 轴交点的坐标为 (0) +(1) +(2) (0) σα = =1 3 (2k + 1)π 取 k = 0, α = 60° α = 渐近线与实轴正方向的夹角 3 k = 1, α = 180° k = 1, α = 60° 三条渐近线如图所示。
自动控制原理
利用以上原则求例 8-1 的根轨迹图: 已知开环极点为0,-2。首先应用幅角条件,即
(∠s + ∠(s + 2)) = ±180°(2k + 1)
用试探的方法可找出满足上述条件的 s 点。 由幅角条件分析可知,实轴上根轨迹位于(-2,0)区间,实 轴之外根轨迹为0,-2两点的中垂线。 用幅值条件可算出根轨迹上各点对应的 K* 值。 如对(-1+j) 点,有 K = s i s + 2 / 2 = ( 2i 2)/ 2 = 1 得 K* = 2
自动控制原理
五、根轨迹的渐近线
* 如果开环零点数 m 小于开环极点数 n,则K → ∞ 时,趋向无 穷远处的根轨迹共有 (n-m) 条,这些根轨迹趋向于无穷远处的方向 角可由渐近线决定。
渐近线与实轴交点坐标公式 该式的分子是开环极点之和减零点之 和,分母是开环极点数减零点数。
∑ p ∑z
σα =
i =1 i j =1
∏ (s z )
由根轨迹方程知,
m
∏ (s p )
j =1 i
i =1 n
i
=
1 K*
K * → ∞ 时,s – zi = 0
所以,根轨迹终止于开环零点。 又,若 n>m ,则 s →∞ 时,上式可写成 即有 (n-m) 条根轨迹趋向于无穷远处。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+D *(1)(2)K s s s --若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++ (1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解之得 *00K ω=⎧⎨=⎩、*162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036λλλλ--=++=+解之得39λ=-。
即当*162K =时,闭环系统的3个特征根分别为1λ=、2λ=-39λ=-。
系统根轨迹如图所示。
图 题所示系统根轨迹图系统结构如下图所示绘制系统的根轨迹(0K <<∞),并确定系统欠阻尼状态下的K 值。
解:系统闭环传递函数为 ()()()2929()99299122s s s Ks s s Ks s s s s φ+==+++++++。
特征方程为22990s s Ks +++=。
等效开环传递函数为 29()()29KsG s H ss s =++。
系统有2条根轨迹分支,起始于开环极点1,21p =-±,1条终止于开环零点0z =,另一条沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],0-∞。
根轨迹的渐近线与实轴交点和夹角分别为((11 21aσ-++--==-,()21 0,2ak ϕπ+== 实轴上分离点方程为22909d s s ds Ks ⎛⎫++= ⎪⎝⎭。
解方程得到13d =-、23d =(弃去),对应49K =。
根轨迹与虚轴在有限范围内无交点,根轨迹如图所示。
图 题所示系统根轨迹图由根轨迹可知当409K <<时,系统有两个闭环极点,为欠阻尼响应。
已知负反馈控制系统的闭环特征方程为*2(14)(22)0K s s s ++++= (1) 绘制系统的根轨迹(*0K <<∞);(2) 确定使复数闭环主导极点的阻尼系数0.5ζ=的*K 值。
解:系统开环传递函数为*2()()(14)(22)K G s H s s s s =+++开环极点为114p =-、2,31j p =-±。
实轴上根轨迹区段为(],14-∞-。
根轨迹的渐近线与实轴交点和夹角分别为()()()1411 5.33a j j σ-+--+--==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩实轴上分离点方程为11101411d d j d j++=++++-,解之得9.63d =-。
求与虚轴交点,闭环特征方程为*2()(14)(22)D S K s s s =++++。
令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )116280Im (j )(j )1300G H K G H ωωωωωωω⎧+=-++=⎪⎨+=-+=⎪⎩,解得 * 5.4438.6K ω=±⎧⎨=⎩。
因cos 0.5β=,故60β=︒,作过原点与负实轴夹角为60±︒的直线,在s 上半平面交P 、Q 两点,如图所示。
P 点坐标为0.94j 1.62s =-+,则对应*0.94j1.62(14)(0.94j 1.62)(0.94j 1.62)21.61s s s s K =-+++-++==图 题所示系统根轨迹图已知单位反馈系统的开环传递函数为*()()(1)(1)2.56K G s H s s s s =++(1) 绘出K 由0→∞变化时系统的根轨迹 (根轨迹的分离点、渐近线、与虚轴交点的数值要求精确算出)。
(2) 用根轨迹法分析:能否通过调整K 使系统的阶跃响应超调量%25%σ<,为什么 (3) 能否通过调整K 使系统的静态误差系数15K ≥,为什么解:系统开环传递函数为*()()(1)(1)2.56K G s H s s s s =++化成根轨迹形式为*()()( 2.5)(6)K G s H s s s s =++,其中*15K K =。
(1) 开环极点为10p =、2 2.5p =-、26p =-。
实轴上根轨迹区段为[]2.5,0-、(],6-∞-。
根轨迹的渐近线与实轴交点和夹角分别为()()2.56 2.833a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩实轴上分离点方程为1112.56d d d +=++,解出1 1.1d =-、2 4.56d =-(弃去)。
求与虚轴交点,闭环特征方程为*()( 2.5)(6)D S K s s s =+++令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )18.50Im (j )(j )1150G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩ 解得 * 3.87127.5K ω=±⎧⎨=⎩。
做出根轨迹如图所示。
图题所示系统根轨迹图(2) 当%25%eσ-=<时,即0.403ζ>,或cos66.2arβζ<<︒。
作过原点与负实轴夹角为66.2±︒的直线,与根轨迹有交点为P、Q两点,如图所示。
P点坐标为0.8j1.7s=-+,使用幅值条件计算此点对应的*K,即*8j1.7( 2.5)(6)24.6sK s s s=-+=++=*15 1.64K K=÷=(3) 从根轨迹曲线可知,当*127.5K≥即8.54K≥,系统是不稳定的,故无法通过调整K 使系统的静态误差系数15K≥。
K值范围。
解:系统开环传递函数为(0.251)()()(0.51)K sG s H ss s+=+,化成根轨迹形式为*(4)()()(2)K sG s H ss s+=+,其中*0.5K K=。
系统开环极点为1p=、22p=-,开环零点为4z=-。
实轴上根轨迹区段为[]2,0-、(],4-∞-。
渐近线与实轴的夹角为()2121akπϕπ+==-实轴上分离点方程为11124d d d+=++,解出11.172d=-、26.828d=-,根轨迹如图所示。
图 题所示系统根轨迹图系统无超调即特征根全部为负实数,从根轨迹图中看出,分离点1 1.172d =-与会和点2 6.828d =-为临界点,需求出此两点所对应的K 值。
系统的特征方程为20.5(10.25)0s K s K +++=分别将1 1.172s d ==-、2 6.828s d ==-代入上式可解得10.686K =、223.31K =。
由此求得系统无超调响应的K 值范围是00.686K ≤≤、23.31K ≤≤+∞设正反馈系统的开环传递函数为2(2)()()(3)(22)K s G s H s s s s +=+++ 画出K 变化时系统的根轨迹.解:开环极点为1,21p j =-±、33p =-,开环零点为2z =-。
实轴上根轨迹区段为[)2,-∞、(],3-∞-。
渐近线与实轴的夹角为 20,31a k πϕπ==- 实轴上分离点方程为()()232202s s s d ds s ⎡⎤+++⎢⎥=+⎢⎥⎣⎦,解出10.8d =-、2,3 2.35j0.77d =-±。
其中10.8d =-是根轨迹上的分离点。
出射角方程为()()()11112130 =0459027 =72p z p p p p θ=︒+∠--∠--∠-︒+︒-︒-︒-︒272θ=︒1d 处的分离角方程为()()11113112=(200)22d k d z d s k θππ⎡⎤=+∠--∠-+︒-︒⎣⎦当10,0d k θ==︒;当11,d k θπ==,即1d 处的分离角为0︒、π。
1d 处的会合角方程为()()()()()11112131112121 =21002d k d p d p d s k ϕππαα⎡⎤=++∠-+∠--∠-⎣⎦++-+︒-︒⎡⎤⎣⎦当10,2d k πϕ==;当11,2d k πϕ==-,即1d 处的会合角为2π±。
根轨迹与虚轴交点为0ω=,根轨迹如图所示。
图 题所示系统根轨迹图设单位反馈系统的开环传递函数为10(1)()(0.51)(1)s G s s Ts -=++画出T 变化时系统的根轨迹。
解:系统的特征方程为(0.51)(1)10(1)0s Ts s +++-=。
对上式变换为(0.51)9.5110Ts s s +-+=。
等效闭环传递函数为 *(2)()1119.5T s s s s ϕ+=--。
等效开环传递函数为*(2)()()119.5T s s G s H s s +=-,其中*29.5TT =⨯。
可知该系统根轨迹应使用0︒根轨迹绘制方法。
渐近线与实轴的夹角为 212a k πϕ=-,解之得 0,a ϕπ=。
实轴上的根轨迹为[]2,0-、[)1.16,∞。
分离点为方程为 *119.50(2)s d ds T s s ⎡⎤-⎢⎥=⎢⎥+⎢⎥⎣⎦,解之得10.75d =-、2 3.07d =,代入到特征方程中得到 1.71T =与38.76T =。