红外跟踪系统
红外多目标跟踪与预测技术的研究

百
=
一
(+p R 2 )
一
△ R
1
△日
R R- T A ( +P ・ 日 2 ) AT
Ⅲ : R
: 一
(+p . T 2 )A /
其 中, H为 目标 辐射强度 , V 为 目标径 向速 度, A T为 帧间时 间间隔, T I 目标命 中时 T为 间,P 为随高度和仰角变化的函数,0 <1 <P 。 若 目标的运动速度 加速度超过某- I 限阈值 , -' ]
示数 据 。
从 6 年 代 开始,美国 、瑞 典 、加 拿大 、法 0 国等 国家就陆 续开始 了 IS R T的研制工作 早期 的 IS R T只 比 F I 像机多 些简单 目标的指示 LR摄
由于 红外 焦 平面 面 阵探 测 器 的发展 ,凝
视 成像 IS R T系统 越 来越 受到 重视 ,其主要 特 点是 高速成 像帧频 和高探 测灵敏度 ,数据 量 比 较大 。假设 帧 频 为 5H 0 z,每 帧 图像 分 辨 率是 26 26,每个 像素量 化为 1b ,则 图像数据 5x 5 外》 月刊
红 外 多 目标 跟踪 与预测 技术 的研 究
李 卫华
( 中国 科学 院上 海 技术 物理 研 究所 ,上 海 , 208) 003
1 红外 搜 索 与跟 踪 系统 ( T I )的发 2I T 系统 多 目标 跟踪和 预 测 的特 RS RS 点 展 状 况
可同时跟 踪的最 多 的 目标数量 直接和 系统的处
理 能力 相关 。虽然 在探 测器 的视场 内,真正 目
标 的实 际数量 可能非 常少 ,但仍 需要庞 大的处
T系统简介

5T系统简介一、THDS(红外线轴温探测系统)(Trace Hot box Detection System)二、TFDS(货车运行故障动态图像检测系统)TVDS(客车运行故障动态图像检测系统)( Trouble of moving Freightcar Detection System )三、TADS(滚动轴承早期故障轨边升学诊断系统)(Trackside Acoustic Detection System)四、TPDS(铁路客货车通用运行品质轨边动态监测系统.)( Truck Performance Detection System )五、TCDS(客车运行安全监控系统)一、THDS(红外线轴温探测系统)(Trace Hot box Detection System)THDS(红外线轴温探测系统),利用轨边红外线探头,对通过车辆每个轴承温度实时检测,并将检测信息实时上传到分局车辆运行安全检测中心,进行实时报警。
通过配套故障智能跟踪装置,实现车次、车号跟踪,热轴货车车号的精确预报,重点探测车两轴承温度,对热轴车辆进行跟踪报警。
重点防范热切轴事故。
THDS实现了联网运行,每个探测站接车和轴温探测信息直观显示,实现跟踪报警。
二、TFDS(货车运行故障动态图像检测系统) TVDS(客车运行故障动态图像检测系统)( Trouble of moving Freightcar Detection System )TFDS(货车运行故障动态图像检测系统),采用高速连续数字照像技术、大容量图像数据实时处理技术和精确定位技术,利用轨边高速摄像头,对运行货车隐蔽故障和常见故障进行动态检测,及时发现货车运行故障,重点检测货车走行部、制动梁、悬吊件、枕簧、大部件、钩缓等安全关键部位,重点防范制动梁脱落事故,防范摇枕、侧架、钩缓大部件裂损、折断,防范枕簧丢失和窜出等危及行车安全隐患。
TFDS的实施,实现了列检作业从人控向机控、室外向室内、静态检测向动态检测的大变革。
红外系统概述

诊断与辅助治疗
红外系统在医学领域中用于诊断疾病和辅助治疗,如红外热像仪 可以检测炎症、肿瘤和其他病变。
康复治疗
红外系统用于康复治疗,如缓解疼痛、促进血液循环和肌肉放松 等。
健康监测
红外系统可以监测人体的生理参数,如体温、心率和呼吸等,用 于健康监测和预防保健。
THANKS FOR WATCHING
智能化
随着人工智能和机器学习 技术的发展,红外系统正 朝着智能化方向发展,能 够实现自适应校准、自动 识别和智能分析等功能。
网络化、远程化
随着物联网和通信技术的 发展,红外系统正逐渐实 现网络化、远程化,能够 实现多点监测、远程控制 和实时数据传输等功能。
05 红外系统的应用实例
军事领域的应用
目标检测与跟踪
红外系统概述
目录
• 红外系统简介 • 红外系统的原理 • 红外系统的技术指标 • 红外系统的优势与局限性 • 红外系统的应用实例
01 红外系统简介
红外系统的定义
红外系统是一种利用红外线技术进行信息获取、 传输和处理的系统。
红外线是一种电磁波,波长在760纳米至1毫米之 间,介于可见光和微波之间。
辐射特性
物体在向外辐射红外线的同时,也在 吸收外界投射来的红外线。
辐射源
自然界中一切温度高于绝对零度的物 体都以电磁波的形式时刻不停地向外 传送热量,这种传送能量的方式称为 辐射。
红外探测原理
探测器
红外探测器是用来探测红外辐射的传感器,其工作原理是利用某些材料或结构在受到红外辐射时,其电学或光学性质 发生变化,从而检测出红外辐射的存在、大小和方向。
红外成像是指通过红外探测器接收目 标场景的红外辐射,经过信号处理后 ,在显示器上生成红外热图像的过程 。
美国导弹防御系统全域红外探测装备发展、体系分析及能力预测
美国导弹防御系统全域红外探测装备发展、体系分析及能力预测范晋祥中国航天科技集团公司八院八部摘要:红外探测跟踪系统在美国目前部署的弹道导弹防御体系中,尤其在弹道导弹发射早期预警和动能拦截弹高精度制导等方面,起着关键的作用。
为了进一步完善和改进其弹道导弹防御体系,近年来美国正在进一步发展新一代的弹道导弹防御红外系统与技术,正在大力发展改进弹道导弹发射早期预警能力的天基高轨道红外预警系统,发展旨在实现对弹道导弹威胁的全弹道(从助推段到中段、末段)监视跟踪的空间监视与跟踪系统,发展先进的、高性能大规格红外焦平面阵列、双色(多色)大规格红外焦平面阵列以提高星载红外告警系统、天基监视与跟踪系统以及动能拦截弹红外导引头的性能,发展用于拦截效果评估和弹道导弹发射早期预警性能改进的先进的多光谱、超光谱探测技术,此外还在发展用于弹道导弹防御的机载红外探测系统,以构建包括天基高轨早期预警、天基低轨全弹道跟踪、机载助推段、上升段跟踪和弹载跟踪导引的弹道导弹防御全域红外探测武器装备。
本报告概述了近年来美国弹道导弹防御系统中红外系统与技术的新进展,分析了美国弹道导弹防御系统的全域红外探测武器装备的体系构成,预测了美国未来弹道导弹防御系统红外探测装备的能力。
关键词:弹道导弹防御系统、导弹防御、预警卫星、空间目标监视与跟踪系统、动能拦截器、导引头、红外、焦平面阵列1 弹道导弹防御红外探测、跟踪系统发展简况红外探测跟踪系统与动能拦截弹红外导引头在美国目前部署的弹道导弹防御系统中起着举足轻重的作用,天基红外预警系统是导弹防御系统实现对弹道导弹发射的早期预警的关键,是确保实施成功拦截的先决条件,而动能拦截器红外导引头则是拦截目标的关键。
然而,美国目前部署的弹道导弹防御系统仅具备初始作战能力,尚不具备助推段、上升段防御能力,以地基、海基雷达为主的弹道导弹防御探测跟踪传感器不具备对弹道导弹威胁的全球范围内的持久监视、跟踪能力,而且原有的天基红外预警系统也存在着一些固有的缺点,如不能跟踪中段飞行的导弹,对国外设站的依赖性大,在南北极地区存在一些无法监视的盲区,星上红外探测器扫描速率低、频段少,对射程近的战区导弹难以给出充足的预警时间,虚警问题始终未得到根本解决,目前装备的动能拦截弹也存在着识别能力不足的缺点。
多ADSP-TS201红外弱小目标实时检测跟踪系统的硬件设计

Ab t a t s r c :The h r wa ede i n ofa r a i ei r r d d m a g td t c i n r c i y t m si — a d r s g e ltm nfa e i t r e e e ton a d t a k ng s s e wa n
T S 01 e e c up e o e y t o tt t p r le r e sng m o l . T h om pu a i a e f m — 2 w r o l d l os l o c ns iu e a a a l lp oc s i du e ec t ton lp ror
维普资讯
第 l 5卷
第 6期
光 学 精 密 工 程
0p is a d Pr cso g n e ig t n e ii n En i e rn c
Vo _ 5 No 6 ll .
20 年 6 07 月
Jn 20 u.07
文章编号
摘 要 : 绍 了 红外 弱小 目标 实 时检 测 跟 踪 系 统 的 硬 件 设 计 。重 点 介 绍 了 系统 中 信 号 处 理 模 块 部 分 的 设 计 , 部 分 采 用 介 该
An l ei 公 司 的 60MHz 性 能 数 字 信 号 处 理 器 AD PT 2 1 四片 A P T 2 1以 松 耦 方 式 互 联 , 成 并 行 信 ao D v e g c 0 高 S —S0 , DS - S 0 构 号 处 理 模 块 。该 模 块 定 点 运 算 的 峰 值 速 度 可 达 到 1. MAC 1Bt , 点 运 算 的 峰 值 速 度 可 达 到 l. L P 。 为 9 2G (6 i 浮 ) 4 4GF O S
【国家自然科学基金】_红外搜索跟踪系统_基金支持热词逐年推荐_【万方软件创新助手】_20140731
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6
2011年 科研热词 背景抑制 目标检测 高斯尺度混合模型 核函数 曲面波变换 剪切波变换 推荐指数 2 2 1 1 1 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
推荐指数 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 2词 非下采样轮廓波变换 集中融合 超大扫描视场 角点检测 自适应混合高斯模型 自由空间光通信 背景更新框架 纯方位跟踪 红外搜索跟踪 红外对抗 红外图像配准 目标检测 椭球形整流罩 杂波抑制 机动目标跟踪 旋转双棱镜 扩展h∞滤波 序列图像 地基 双边滤波 分布孔径红外系统 光束指向 光学设计 作用距离模型 中波红外系统 tms320c6678 klt跟踪 fpga
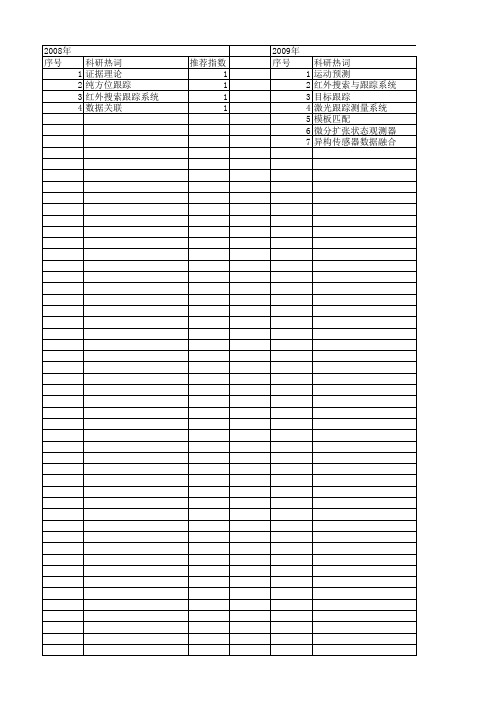
2008年 序号 1 2 3 4
科研热词 证据理论 纯方位跟踪 红外搜索跟踪系统 数据关联
推荐指数 1 1 1 1
2009年 序号 1 2 3 4 5 6 7
科研热词 运动预测 红外搜索与跟踪系统 目标跟踪 激光跟踪测量系统 模板匹配 微分扩张状态观测器 异构传感器数据融合
推荐指数 1 1 1 1 1 1 1
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
红外成像系统简介

THANKS FOR WATCH时监测
实时红外成像技术能够实现快速的目标物监测,及时发现异常情 况,提高预警和响应速度。
动态跟踪
实时红外成像技术能够实现动态跟踪,对移动目标进行连续监测, 提高跟踪精度和实时性。
促进智能化应用
实时红外成像技术能够与人工智能等技术相结合,实现智能化应 用,提高红外成像系统的应用价值。
性能指标
电源效率、稳定性、可靠性等。
03 红外成像系统的特点
穿透烟雾和灰尘的能力
01
由于红外线波长较长,能够较好 地穿透烟雾和灰尘,因此在火灾 、烟雾等场景中,红外成像系统 能够清晰地观测到目标。
02
在工业领域,红外成像系统也常 用于检测设备运行时的温度异常 ,穿透工厂内的烟尘和气体。
夜间或低光环境下的观测能力
红外成像系统简介
目 录
• 红外成像系统概述 • 红外成像系统的组成 • 红外成像系统的特点 • 红外成像系统的优势与限制 • 红外成像系统的未来发展
01 红外成像系统概述
红外成像系统的定义
红外成像系统是一种能够接收并处理 红外辐射的设备,通过将红外辐射转 换为可见光图像,实现对目标物体的 非接触式检测和识别。
红外成像系统不受光照条件限制,能够在夜间或低光环境下 正常工作,观测目标。
在军事侦察、野生动物研究等领域,红外成像系统是不可或 缺的工具,能够在黑暗中捕捉到目标的热辐射。
对温度变化的敏感性
红外成像系统通过测量目标发射的红外辐射来感知温度变化,因此对温度变化非常 敏感。
在医疗领域,红外成像系统可用于检测人体病变部位的温度异常,如乳腺肿瘤等。
工作原理
基于热电效应或光电效应, 将红外辐射转换为电信号。
性能指标
机载红外搜索跟踪系统(IRST)综述

I RST 系统9特别是早期的第一代I RST9严格的讲
不是成像系统o一般采用工作在3 !5 "m 的中波器件探 测目标辐射o由于空中背景相对地面背景来说比较简单9
1 )抗干扰\抗隐身能力强9隐蔽性好o
可以把目标作为热点与背景分开9对目标进行搜索和跟
现代各种类型的作战飞机都把发展机载电子战技 踪sFLI R 传感器大都采用工作波长在8 !14 "m 的长波器 术和隐身技术放在突出位置9采用有源探测方式的机 件9探测目标和地面背景的温差成像o飞行员通过图像完
国外战斗机主要I RST 应用情况见附表1 9下面就 国外典型机载I RST 作一介绍G
表1 "国外典型机载红外搜索跟踪系统情况""Tab1e 1 "Typica1 I RST abrOad
型号名称
工作波段及 制造厂商
探测部位
搜索范围
探测距离
配装机种
用途
美国休斯 方位 65
AN AWG-9 3 .5 !4 .8 "m
3 "机载I RST 的发展历程与装备现状
3 .1 "机载I RST 系统的发展历程 机载I RST 的研制始于上世纪50 年代9成熟于80
14
年代9在80 年代末90 年代初大量装机使用o从系统 水平及所采用的技术来看9机载I RST 的发展可大致 划分为3 个阶段:
五六十年代的发展可以归纳为第一阶段o世界上 第一个机载I RST 系统是美国在50 年代中期为F-104 飞机研制的o系统采用单元硫化铅 (PbS )为光敏元 件9只能接受发动机尾喷口的红外辐射o由于探测距 离近9很快就随 F-104 飞机一起退役o在60 年代9美 国麦克 唐纳公司(Mc DOnna1 )为美国海军 F-4B 飞 机研制的 R1137/AAA-4 型 机 载 红 外 搜 索 跟 踪 系 统 (I RSTS)堪称这一阶段的代表o系统安装在机头下 方9工作波段3 !4 .5 "m9系统采用两个光伏型单元锑 化铟 (I nSb )器件9一个矩形探测器用于目标搜索9一 个圆形探测器用于目标跟踪9对发动机尾喷口探测距 离大于30 k m9对高空高速目标具有全方位探测能力o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章红外跟踪系统
1.红外跟踪系统的基本原理:
如图5-1所示,由无穷远目标辐射来的红外辐射能量透过整流罩照射到主反射镜上,经聚焦并反射到次反射镜子上,由次反射镜反射后,再经校正透镜进一步聚焦,最后成像于调制盘上,红外福射经调制盘调制后成为调制信号,目标像点在调制盘上所处的位置与目标在空间相对光轴的位置是一一对应的,因此,通过光学系统聚焦以及调制盘制后的信号,可以确定目标偏离光轴的大小和方位。
非制冷红外焦平面
VO X(如VO2等)
图5-1 光学系统结构示意图
2.红外跟踪系统的组成
如图5-1所示,红外跟踪系统由整流罩,主反射镜,次反射镜,校正透镜,调制盘,浸没透镜,光敏电阻和伞型光栏等元件组成,其各元件的主要功能如下:
1)、整流罩:是一个半球形同心透镜,作为导弹头部的外壳。
它是一块负透镜,其作用为校正主反射镜的球差及作导引头的密封。
整流罩在导引头工件波段内有高的透过性能,亦即吸收、反射作用很小。
这种导弹的整流罩采用氟化镁多晶制成。
耐高温、机械强度高。
2)、主反射镜:起聚焦作用,它给整个光学系统带来正球差。
焦距f'=41.18mm,直径47.2mm,材料为K8玻璃,凹面上真空镀铝以减少入射辐射能损失。
3)次反射镜:用来折叠光路,同样为K8玻璃,表面镀铝。
4)校正透镜:用来把伞形光阑、平面反射镜等零件与镜筒连接在一起,起支撑作用。
另一方面因消除像差的需要而在次镜之后加入这样一个凸透镜,可以进一步消除剩余像差。
支撑透镜材料为氟化镁多晶。
5)伞形光阑:限制目标以外的杂散光线直射入系统光敏元件上的辅助光阑。
为了更有效地消除杂散光,伞形光阑上设有消光槽,各元件不通光部分都进行黑化处理。
6)场镜:可把通过调制盘的辐射能会聚到探测器光敏层上;另一方面,加入场镜后原来经物镜聚焦的照度不均匀的目标像斑,经焦面后发散的光线折向光轴,使光能均匀地分布在探测器的光敏层上。
场镜采用平凸透镜。
场镜材料为氟化镁单晶,在工作波段内有良好的透过率(一般紧贴调制盘后面)。
7)滤光镜:从目标和背景辐射光谱中过滤出所需要的辐射波段。
采用氟化镁单晶作为基片,作成 2.5μm为起始波长的干涉滤光片(图中未画出)。
8)浸没透镜:使探测器光敏层和超半球透镜的底面形成光学接触,会聚光束,提高光敏元件的接收立体角,减少光敏元件的面积从而降低噪声。
这种导弹采用钛酸锶单晶作为浸没透镜材料。
9)调制盘:把经过光学系统聚焦后的目标红外辐射能量汇聚成一个足够小的像点,落在光学系统的焦平面上,即调制盘上。
通过调制盘的旋转,将连续的红外辐射调制成一组一组的光脉冲,以其幅值和相位提供目标偏离导弹光轴的大小和方位信息,并抑制由背景来的干扰信号。
3.红外跟踪原理:
调制盘被安装在光学系统的焦平面上,因此目标的红外辐射能量被聚焦成像于调制盘上,由于调制盘随同转子一同旋转,于是连续的红外辐射就被调制成断续的一组一组的光脉冲。
下面就通过目标像点落在调制盘的不同位置来说明其工作原理。
调制盘是利用光刻技术在直径为1毫米的玻璃片上加工出如图5-2a所示的图案。
调制盘的上半圆为调制区,用阿基米德螺旋线间隔成黑白相间的各6条区域,白色区域红外线能全部通过,黑色区域红外线不能透过。
调制盘的下半圆由很多条密集的等宽的等间距的白色和黑色的同心半圆组成,红外线只能透过一半,称作半透明区。
在下半圆中,有两个小半圆仍为黑白相间的阿基米德螺旋线间隔开来的区域,用来改善调制特性,小半圆的直径为调制盘半径的三分之二。
为了便于分析,把调制盘简化成如图5-2b所示的形式,实际上与图5-2a 的原理是一样的。
图5-2 调制盘示意图
(1)当目标的像点正好落在调制盘中心附近,也就是陀螺光轴正好与视线重合时,如图5-2b的0点,目标像点占据透明区与不透明区的面积都相同,透过的红外辐射能量占全部能量的一半,调制盘旋转与否都是如此,因此,调制盘对像点不起调制作用。
照射到光敏电阻上的红外福射能量是不变的,光敏
电阻上的电压也是不变的,设其值为V0,光敏电阻的交流输出为0,放大器的输出电压也为0。
如图5-3、a、a1、a2所示。
因此,调制盘中心附近的一个小范围内对像点不起调制作用,把这一区域称之为盲区。
(2)当目标像点落在调制盘“1”的位置时,目标对光轴的偏角Δq i,像点通过透明区、不透明区、半透明区、相应的光敏电阻阻值就要减小、增大、和保持一个常值,相对应的光敏电阻两端电压就分别小于V0、大于V0和保持一常值V0,如图5-3b所示。
光敏电阻两端的交流输出如图5-3b1所示。
晶体管放大器输出如图5-3b2所示。
图5-3 调制信号波形图
(3)当目标像点落在调制盘“2”点的位置上,和像点“1”的位置同样
道理,可分别得到光敏电阻上的电压如图5-3c所示,光敏电阻两端交流输出如图5-3c1所示,晶体管放大器输出如图5-3c2所示。
通过比较图b、b1、b2与图c、c1、c2可以看出,由于目标像点“2”比像点“1”偏离调制盘中心更远,因而目标像点在“2”位置时,光敏电阻交流输出幅值和晶体管放大器输出电压幅值都比在像点“1”的位置时要大,因此,通过目标像点偏离调制盘中心距离的大小(即Δq的大小)就能够反应出目标偏离光轴的大小。
(4)当目标像点落在调制盘上“3”的位置时,如图5-2a所示。
目标像点“3”和像点“2”偏离调制盘中心的距离大小是一样的,但是,像点“3”和像点“2”比较,在方位上相差一个θ角度,根据上面分析像点“2”的道理一样,可以分别得到像点在“3”位置时光敏电阻两端电压、光敏电阻交流输出电压、晶体管放大器输出电压,如图5-3d、d1、d2所示。
与图5-3c、c1、c2比较,输出信号幅值都是一样的,只是在相位上相差θ角,因此,输出误差信号的相位能够反应出目标偏离的方位。
从以上分析可以做出调制盘的特性曲线,如图5-4所示。
当目标像点偏离调制的中心后,光敏电阻的输出电压,随着偏离调制盘中心距离的增大而增大。
当失调角Δq>Δq max时像点越出调制盘的边缘,因而光敏电阻输出电压为0。
通过比较像点“3”与“2”如图5-2所示,虽然像点偏离中心距离一样,但由于偏离的方位不同,因而晶体管放大器输出电压波形在相位上相差一定的角度,从而反应出目标偏离光轴的方位。
图5-4 调制盘特性曲线。