3 南昌城市轨道交通工程GPS控制网的建立方法(三等奖-陈荣林)
卫星定位平面控制网的建立
卫星定位平面控制网的建立具有全球导航定位能力的卫星定位导航系统称为全球卫星导航系统,英文全称为Global Navigtion Satallite System,英文缩写GNSS。
目前已有的导航系统有:美国的全球卫星定位系统(GPS):(24+6);俄罗斯的全球卫星导航系统(GLONASS):(30)。
正在发展的有欧盟的伽利略全球卫星定位系统(GALILEO):(27+3);中国的北斗卫星导航系统(COMPASS):(30+5)。
本任务主要认识全球卫星定位系统(GPS)的原理与完成工程建设平面控制网的建立。
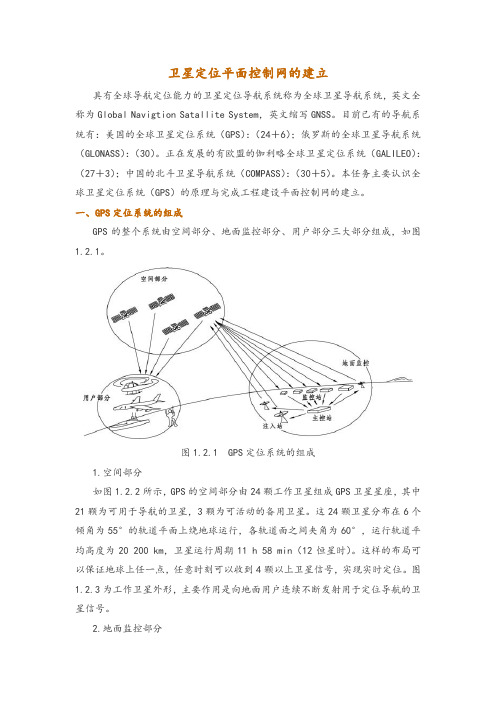
一、GPS定位系统的组成GPS的整个系统由空间部分、地面监控部分、用户部分三大部分组成,如图1.2.1。
图1.2.1 GPS定位系统的组成1.空间部分如图1.2.2所示,GPS的空间部分由24颗工作卫星组成GPS卫星星座,其中21颗为可用于导航的卫星,3颗为可活动的备用卫星。
这24颗卫星分布在6个倾角为55°的轨道平面上绕地球运行,各轨道面之间夹角为60°,运行轨道平均高度为20 200 km,卫星运行周期11 h 58 min(12恒星时)。
这样的布局可以保证地球上任一点,任意时刻可以收到4颗以上卫星信号,实现实时定位。
图1.2.3为工作卫星外形,主要作用是向地面用户连续不断发射用于定位导航的卫星信号。
2.地面监控部分GPS的监控部分是由分布在全球的若干个跟踪站构成的监控系统组成,根据作用不同,监控系统由1个主控站、5个监控站、3个注入站组成。
图1.2.2 GPS卫星星座分布图1.2.3 GPS工作卫星(1)主控站设立在美国科罗拉多的法尔孔空军基地。
它的作用是根据各监控站对GPS卫星的观测数据,计算出各卫星的星历、卫星状态、钟差改正等参数,并将这些数据通过注入站注入卫星中;同时,它还对卫星进行控制,向卫星发布指令,当工作卫星出现故障时,调度备用卫星,替代失效的工作卫星工作。
GPS控制网布设原理与方法

A1 2
1
B1
C1
4
2
第十五页,共60页。
三、GPS控制网布设
➢ 网连式
相邻两个同步图形通过三个以上的公共点连接,至少需要4台GPS接收机, 图形条件很强,成本较高,多用于高精度的控制网。
第十六页,共60页。
三、GPS控制网布设
➢ 混连式
相邻两个同步图形可能通过点、边、网等形式连接,自检性 和可靠性较好,能有效发现粗差,在GPS工程控制网中广采用。 常见的有三角形和环形网等布网形式。
观测时间
双频接收机同步观测5~10min,单频观测15min ,接近静态相对定位测量模
式的精度。
特点 具有速度快、精度高、能耗低等特点,但构不成闭合环,可靠性底,主
要用于一般控制网的建立和加密、工程测量、地籍测量和碎步测量。
第二十七页,共60页。
四、GPS控制网测量
➢准动态定位
作业方法
在测区中央的某一基准站上,安置接收机连续跟踪所有可见卫星,另一台接收
起算点在GPS网中应该均匀分布,避免分布在网中的一
侧;
EDM测距边作为起算边长时,数量在3~5条为宜,但是 EDM边的两端点高差不应过大;
第七页,共60页。Biblioteka 一、GPS控制网的技术设计
3、GPS控制网的基准设计
➢ 注意事项
起算方位不宜过多,可以布设在网中的任意位置 GPS网得到大地高,联测水准高程后才能将高程转换为正常高, 联测规定为:
➢ 独立基线
GPS控制网中相互之间不能构成检核条件的边,称为独立基线。N 台GPS同步观测可得到基线边条数J为:
独立基线为:
J = N (N-1) / 2
DJ = N - 1
GPS控制网的建立
2.1、GPS控制网技术设计的一般原则(2)
• 城市GPS控制网的主要技术要求:
等级 平均距离 a(mm) b(1*10-6) 最弱边相对中误差 二等 三等 四等 一级 二级 9(km) 5(km) 2(km) 1(km) < 1(km) ≤10 ≤10 ≤10 ≤10 ≤15 ≤2 ≤5 ≤10 ≤10 ≤20 1/120000 1/80000 1/45000 1/20000 1/10000 闭合边数 ≤6 ≤8 ≤10 ≤10 ≤10
二、GPS控制网的技术设计
2.1、GPS控制网技术设计的一般原则
1. 尽量满足各方面的要求 • 工程:满足勘测设计、施工放样、运行维护阶段的需 要。 • 城市:满足近期建设和远期规划的需要。 2. 分级布网 • 国家控制网的布网要求
A(km) B(km) 相邻点最小距离 相邻点最大距离 相邻点平均距离 固定误差a(mm) 比例误差b(mm) 100 2000 300 ≤5 ≤0.1 15 250 70 ≤8 ≤1 C(km) 5 40 15~10 ≤10 ≤5 D(km) 2 15 10~5 ≤10 ≤10 E(km) 1 10 5~2 ≤10 ≤20
• • • • • • •
坐标系统与起算数据 网形设计 选点和埋石 观测精度标准 外业作业要求 基线向量解算及成果检核 GPS网平差计算和坐标转换
• 提交成果
三、GPS外业测量工作
3.1、作业模式
1. 静态相对定位模式 2. 快速静态相对定位模式 3. 准动态相对定位模式(走走停停) 4. 动态相对定位模式
GPS控制网的建立
2004年
提
• 概述
要
• GPS控制网的技术设计 • GPS外业测量工作 • GPS基线解算与成果检核 • GPS网平差计算与坐标转换 • GPS接收机的检定
地铁工程GPS控制网建设及数据处理分析
地铁工程 G P S控制 网建设及 数据处理 分析
■ 苏增 云
上方 向通 规,其他位置则 需要具 备一个 方 向通视 。 在进行地铁建设过程 中,G P S控制网布设宜采用边 、 网混联 式结构,以线路沿线 的通视边 为基 础,进行 相应 的异步环 构成 闭合 图形 。每个控 制点都需要有 两条 以上的基线通过 。G P S控制 网观测主要包括制 定观测 计划、接收机的检验 ,以及 外业观测 ,为 了 让 G P S达到更好的观测效果 ,可 以使用多 台接收机 同步进行观察 ,通过 G P S卫星进行相应 的外业观测
尤 其 是首 级 控制 网 一 G P S 控 制 网 的精 度 直 接 关 系 到 整
理,相对测距 中误 差指某边的 中误差 与该边的距离
之 比。相较于 中误 差相对 中误差排除 了观测 条件不
靠性。 三 、 问题 分 析
同等 因素 的干扰 ,能够更直观 的评价数据 成果的可
个地 铁工程的质量 。因此 ,相 关人员还需要就地铁
为标准 差,也就是基 线向量的弦长 中
整个准备工作 ,其 收集的数据对于整个地铁 的建设
有 着 重 要 的作 用 。对 有 关 的 资 料 进 行 查 询 , 在 点 位
( 1 ) 地铁建设 的控制 网必须是在保证整条地铁
线路 走 向 前 提之 下 , 然 后 争 取 做 到 控 制 网强 度 较 高 、
【 关键 词】 地铁建设 控制网分析 数据处理 G P S
关于城市GPS控制网的布设方案及优化设计措施探讨

关于城市GPS控制网的布设方案及优化设计措施探讨摘要:随着gps测量技术的迅速发展及其在测绘领域的广泛应用,gps控制网的优化设计越来越受到重视。
控制网优化设计的目的就是在各种设计方案中选择即可满足精度、可靠性要求,又能使整个建网费用最少。
文章在总结了gps网特点及优化设计原则,如可靠性、精度及经济性等方面特点,提出了gps控制网的优化设计的措施。
关键词:gps控制网;布设方案;优化设计abstract: with the gps measurement technology and the rapid development in the field of surveying and mapping application, gps control network optimization design has been paid more and more attention. optimal design of control network is designed in a variety of design alternatives can satisfy the accuracy, reliability, and can ensure that the whole network construction cost at least. the paper summarized the characteristics of gps network and optimized design principles, such as reliability, accuracy and economy of characteristic, put forward gps control network optimization design measures.key words: gps control network; design scheme; optimization design中图分类号:p25引言gps控制网技术设计是进行gps定位的基础性工作。
利用GPS技术建立城市GPS控制网的方法探讨
第3 5卷 第 3期
2 1 0 2年 3 月
测 绘 与 空 间地 理 信 息
G EO ̄ I S & s A l L l oR MT C P T A NF MA I N E HNoL Y TO T C oG
V 13 N . o . 5, o 3 Ma .,2 1 r 02
利 用 GP S技 术 建 立 城 市 GP S控 制 网 的 方 法 探 讨
量 、 空摄 影测 量 以及地 形 、 航 地籍 测 量 等各 个 方 面 。本 文 以南 方北 极 星 N S90 G 60单 频 G S 收 机和 南 方 随 机 软 P 接 件 G S D 为例 , 通 过海 南 省 乐 东 县 l G S 制 网 PA J 并 D级 P 控 建 设项 目, 探讨 在 G S控 制测 量 过 程 中遇 到 的一 些 技 术 P
Ke o d : P c n l y G S c n o n t ok b sl e v c r ou o ; o s a e dut e t y w r s G S t h o g ; P o t l e r ;a e n et lt n c nt i d aj s n e o r w i os i rn m
I 言
全球 定位 系 统 ( l a Psi i yt 缩 写 G S Go l o tn gSs m, b io n e P)
是 美 国第 二 代 卫 星 导 航 定 位 系 统 。该 系统 以其 全 能 性 ( 陆地 、 洋 、 空 和航 天 ) 全 球 性 、 天 候 、 续 性 和 实 海 航 、 全 连 时 性 的导 航定 位 功能 , 已广 泛 地应 用 于 地测 量 、 程 测 工
乔 丽 华 ,冯 军
GPS工程控制网的布设-最新资料

GPS工程控制网的布设-最新资料GPS工程控制网的布设在经典测量中,控制网的优化十分重要,它直接影响到最后成果的精度。
GPS出现后,控制图的结构概念起了重大变化,原来的一些控制网方案的优化已不再适用,如何分析和讨论GPS网观测方案优化问题,便出现在测量工作者面前,本文就GPS网的布设作一简要分析。
简述了GPS测量技术的发展状态,及GPS工程网的布设,介绍了GPS 测量所具有特点,GPS测量在公路中的应用,最后对GPS测量作出了展望。
1. GPS技术的发展概况全球定位系统(Global Positioning System 简称 GPS)是美国国防部从上世纪70年代开始研制的新一代卫星导航与定位系统,历时20年,耗资200亿美元,于1994 年全面建成。
该系统利用导航卫星进行测时和测距,有在海、陆、空进行全方位实时三维导航与定位能力。
GPS是继阿波罗登月计划、航天飞机后的美国第三大航天工程,如今,它已成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。
1.1 GPS系统的结构组成GPS系统主要包括三大组成部分:即空间星座部分、地面监控部分和用户设备部分。
(1)空间星座部分由21颗工作卫星和3颗在轨备用卫星组成GPS卫星星座,亦即(21+3)GPS星座。
24颗卫星均匀分布在6个轨道平面内,各个轨道平面之间交角60度。
卫星距地面的平均高度为20200km,卫星绕地球运行周期为 11小时58分。
地面观测者每天至少可以观测到4颗卫星,最多还可观测到11颗卫星。
(2)地面监控部分GPS工作卫星的地面监控系统主要由分布在全球的1个主控站、3个注入站和5个监测站组成。
对于导航定位来说,GPS卫星是一动态已知点。
卫星的位置是依据卫星发射的星历,即描述卫星运动及其轨道的参数算得的。
每颗GPS卫星所播发的星历,是由地面监控系统提供的。
卫星上的各种设备是否正常工作,以及卫星是否一直沿着预定轨道运行,都要由地面设备进行监测和控制。
地铁工程中GPS控制网的布网形式
地铁工程中GPS控制网的布网形式摘要:在地铁工程GPS平面控制网的布设中,主要采用的的是边连式的作业方式,保证了观测的图形强度,但是其作业效率较低。
通过在天津地铁二号线的GPS网观测中,采用点、边混连式的布网形式,既能得到较好的图形强度,又极大的提高了作业效率,并且能获得同样的点边精度。
关键词:地铁,GPS控制网,布网一、概述及工程概况80年代以来,随着GPS定位技术的出现和不断发展完善,使测绘定位技术发生了革命性的变革,为工程测量提供了崭新的技术手段和方法。
在我国GPS定位技术的应用已深入各个领域,国家大地网、城市控制网、工程控制网的建立与改造已普遍地应用GPS技术,在石油勘探、高速公路、通信线路、地下铁路、隧道贯通、建筑变形、大坝监测、山体滑坡、地震的形变监测、海岛或海域测量等也已广泛的使用GPS技术。
而随着城市建设的不断发展,作为城市轨道交通的地铁建设成为各地方为缓解日益紧张的城市交通的重要措施。
测量控制承载整个建设工程的基础任务,为地铁工程勘察、设计、施工乃至运营的顺利进行提供最基础的服务。
GPS平面控制测量已广泛应用于各城市地铁建设中,本人在近年来北京、广州、天津的地铁建设中参与了其GPS首级平面控制网的测量工作。
通过几年的实践,来谈谈几点在GPS布网选择上的几点看法。
广州市地铁二号线是继地铁一号线之后的又一大型建设项目,该线北起新市,沿机场路向南经广州火车站、海珠广场等地,南达昌岗路,然后沿昌岗路向东至琶洲,全线总长约30km,呈L形布置,为广州市南北交通的又一大动脉;北京地铁五号线南起宋家庄,北至太平庄,纵穿城市南北,全长约27.7km,是北京市承诺的2008北京奥运会的重点工程之一;天津地铁二号线是天津市快速轨道交通网中的东西骨干线,西起外环线曹庄,东至机场李明庄,全长约22.8km。
地铁为现代大都市的主要交通命脉,它从地下穿越城市中心密集的建筑物,因此高精度的测量是设计与施工顺利进行的保证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南昌城市轨道交通工程GPS控制网的建立方法陈荣林南昌市测绘勘察研究院南昌 330038摘要:介绍南昌城市轨道交通工程控制网的建立方法,重点对轨道交通工程控制网的基准设计和图形设计的方法进行讨论,对GPS技术在高精度工程控制网测量中的应用提出几点看法关键词:轨道交通工程控制网 GPS1、南昌轨道交通1、2号线工程简介轨道交通是一个城市经济社会发展达到较高水平的象征,是一个城市整体形象和品位的展示。
南昌轨道交通1、2号线工程建设的启动,标志着南昌市的交通迈向轨道交通时代,将整体提高南昌市城市综合实力,缓解中心城区交通压力,改善城市环境,提高城市居民的生活质量。
南昌轨道交通1号线由双港大道站至奥体中心站,2号线由红角洲的高速客运西站至城区的玉带河站,总长度分别为28.4公里和24.7公里。
沿线穿越蛟桥镇、经济技术开发区、红谷滩新区、东湖区、西湖区、青山湖区、高新技术开发区等,线路在赣江东侧呈东西走向,在赣江西侧呈南北走向,其中东西跨越约22公里,南北跨越约16公里,全部采用地下形式敷设,沿途设置地下车站共43座。
沿线有城市老城区的商业繁华区和建筑密集区,跨过艾溪湖、八一广场、赣江等地质条件复杂区域,对工程控制网的测量提出了很高要求。
2、轨道交通工程GPS控制网的设计2.1、轨道交通工程GPS控制网设计要求(1)、工程建设前应在城市二等平面控制网的基础上,建立专用的平面施工控制网,其与原有城市控制网重合点的坐标较差应小于50mm。
(2)、轨道交通工程平面控制网分两级布设,一等网为卫星定位(GPS)控制网,二等网为精密导线网。
(3)、若城市轨道交通工程线路轨道的平均高程与城市投影面高程的高差影响每千米大于5mm时,应采用其线路轨道的平均高程作为投影面高程。
(4)、轨道交通工程一等GPS控制网的平均边长约3.0公里,相邻点的相对点位中误差小于±10mm,最弱点的点位中误差小于±12mm,最弱边的相对中误差小于1/10万(5)、轨道交通工程一等GPS控制网的基线平差精度评价要求:无约束平差后:基线向量改正数的绝对值应满足:VΔx≤3σ、VΔy≤3σ、VΔz ≤3σ(σ为标称精度);约束平差后:基线向量的改正数与同名基线无约束平差相应改正数的较差应满足:dVΔx≤2σ、dVΔy≤2σ、dVΔz≤2σ;2.2、轨道交通工程GPS控制网的基准设计GPS控制网的基准设计主要是确定坐标系统(基准)的参数、起算数据及起算点的可靠性。
(1)、轨道交通1、2号线工程在南昌城建坐标系统中存在较大长度变形南昌城建坐标系统参数为:中央子午线为115度30分,投影面高程为参考椭球,参考椭球为克拉索夫斯基椭球,投影方式为高斯投影。
因轨道交通1、2号线工程范围距离中央子午线115度30分约在25-50公里之间,工程平均面的高程为黄海高程约10米(距参考椭球面高度约58米)。
因此,轨道交通工程平均高程面上横向东西跨度每公里长度的投影变形和高程归化改正值如下表:横坐标平均值Ym(Km)投影变形PPm (mm/Km)工程面高程Hm(m)高程归化PPm (mm/Km)合计长度变形PPm (mm/Km)备注10 1.2 10 -9.1 -7.920 4.9 10 -9.1 -4.225 7.7 10 -9.1 -1.4 轨道交通工程范围30 11.1 10 -9.1 +2.0 轨道交通工程范围35 15.1 10 -9.1 +6.0 轨道交通工程范围40 19.7 10 -9.1 +10.6 轨道交通工程范围50 30.7 10 -9.1 +21.6 轨道交通工程范围上表中,在南昌市城建坐标系统中,轨道交通工程所在范围内横向东西跨度每公里长度的投影变形和高程归化的影响均大于5毫米,同时有15公里的横向东西跨度范围,每公里长度合计变形大于5毫米,均超过《城市轨道交通工程测量规范》要求。
因此,必须建立新的轨道交通工程平面坐标系统及参数。
(2)、轨道交通工程平面坐标系统参数确定的依据通过调整中央子午线和投影面的高程,建立轨道交通工程平面坐标系统及参数,使得:①、城市轨道交通工程线路轨道长度的高程归化影响值:每千米小于5毫米;②、城市轨道交通工程线路轨道长度的投影变形影响值:每千米小于5毫米;③、尽量使长度的高程归化值和投影变形值的合计影响值最小;(3)、南昌轨道交通工程平面坐标系统的参数①、1954年北京坐标系(克拉索夫斯基椭球,高斯-克吕格投影)②、中央子午线:115度55分③、投影面高程:黄海高程H=10米(4)、换算和转换方法通过下列步骤,将现有南昌城建平面坐标换算和转换到轨道交通工程平面坐标系统上:①、坐标换带:按高斯换带公式计算,消除投影变形的影响。
②、高程归化改正:根据高程归化改正原理,按四参数(DX=0、DY=0、α=0、K=9.1ppm)进行转换计算,消除高程归化的影响。
③、通过正射转换(四参数DX=40705.528m、DY=67.911m、α=-0.1956°、K=1.000),使某同一点在轨道工程坐标系统中的坐标值的数字与在南昌城建坐标系统中的坐标值数字最为接近,从而可以方便地与城市规划进行衔接。
(5)、对起算数据(现有城市二等GPS控制网点)进行复测检验及选择利用①、选择轨道交通1、2号线工程周边的现有4个城市二等GPS点:JX7、GPS160、GPS110、GPS401组成检测网。
按《全球定位系统城市测量技术规程》中的二等GPS 控制网的测量要求,采用4台leica SR530 GPS接收机同步观测2时段,进行检测。
②、检测网以GPS110、GPS401、JX7为已知点进行约束平差,检测点GPS160的检测值与已知点坐标值较差为5.7mm<50mm,所以四个城市二等GPS点可以作为轨道交通工程一等GPS控制网的起算数据。
并将起算点的城建系统坐标换算和转换为轨道交通工程坐标系统的坐标。
2.3、轨道交通工程一等GPS控制网的图形设计GPS控制网的图形设计主要包括网的连接方式和观测方案,主要考虑同步接收机数量、时间段的连接方式、重复设站率、独立基线向量的选择等。
(1)、GPS控制点的选择和标石埋设①、工程一等GPS平面控制点选在轨道交通沿线和两侧、施工变形区外的建筑物楼顶上或视野开阔的地面且易于长期保存的地方,点位便于安置接收机和操作,有利于其他测量手段进行扩展和联测,点位均远离大功率无线电发射源和高压输电线等。
②、当点位选在站点附近的屋顶上并可直接用于施工的点,在楼顶承重结构上埋设强制归心观测墩。
其他点位可埋设普通基本标石。
③、相邻点尽量相互通视,相邻GPS点间距在城区建筑密集区约为2.5KM;其他区段约为3.5KM;④、工程一等GPS控制点共埋设强制归心观测墩10个,普通基本标石16个。
(2)、轨道工程一等GPS控制网的图形设计南昌轨道交通1、2号线工程一等GPS控制网,选取4个城市二等GPS点与新选的22个控制点组成,分两级观测,即先由4个城市二等GPS点组成检测网,再由26个控制点组成轨道工程一等GPS控制网。
按边连接方式扩展布设。
南昌轨道工程一等GPS控制网布设示意图南昌轨道工程一等GPS控制网的主要设计指标:总点数26 必要基线数25 同步接收机数量8 多余基线数24观测时段数7 复测基线数34总基线数162 总体可靠性指标0.49独立基线数49 平均设站率 2.2总体可靠性指标0.49>0.3,平均设站率2.2>2.0。
符合《城市轨道交通工程测量规范》的要求。
3、GPS控制网外业观测GPS控制网按静态观测方法,采用6台leica SR530和2台leica 1230双频GPS 接收机进行同步观测。
根据按卫星星历预报编制的观测计划进行观测组织,天线安置严格整平对中,天线的定向标志指向正北。
卫星高度角≥15度,有效观测卫星数≥4,PDOP≤6,观测时段长120分,数据采样间隔10 秒。
每时段开机前后取天线高,平均值为天线高的最后结果。
由于控制点标石有强制归心观测墩和普通基本标石,观测用的接收机也有两种型号,因此丈量天线高时要特别注意天线的垂直偏差情况要记录清楚。
观测过程中,要尽量避免外界干扰。
4、轨道交通工程一等GPS控制网数据处理4.1、基线解算采用“Leica LGO 7.0 GPS数据处理系统”进行基线解算。
基线解算时,选择观测时间较长和观测条件较好点作为单点定位点,单点定位点的WGS84坐标作为GPS控制网的WGS84起算坐标。
按优先推算路线逐条解算GPS基线,构成GPS基线网,如图所示。
对不符合要求的基线观测值,要分析原因,消除影响因素,对确实不能满足要求的基线予以删除。
在GPS基线网的32个异步环中,最大的环闭合差为47.1mm,其允许值为72.0mm (环DT1006—DT1010—GPS013,环基线长9873.4米,环闭合差允许值W=2√(3n)σ)。
34条复测基线中,复测基线较差相对最大的为28.1mm,其允许值为30.2mm(为基线DT1006—Ⅳ-442,基线长1924.7米,复测基线较差允许值W=2√2 σ)。
4.2、GPS控制网平差采用“同济TGPPS数据处理软件”进行GPS控制网平差。
(1)、在WGS84坐标系中进行三维无约束平差无约束平差:基线向量改正数的绝对值的最大值为:VΔx=3.4mm<3σ、VΔy=35.5mm<3σ、VΔz=35.1mm<3σ。
(基线DT1006—DT1002,基线长为5394.4米, 3σ=44.1mm)(2)、二维约束平差①、采用4个城市二等GPS点的坐标作为约束条件,进行二维约束平差。
②、二维约束平差:基线向量的改正数与同名基线无约束平差相应改正数的较差的最大值分别为:dVΔx =0.7<2σ、dVΔy =3.0<2σ、dVΔz=1.1<2σ。
(基线为GPS160—GPS013,基线长为2568.7米,2σ=22.6mm)。
③、约束平差后:最弱点2-2025的点位中误差M=5.7mm小于允许的最弱点点位中误差12mm。
④、最弱边4-469—2-2025的相对中误差1.74PPM=1/57.4万,小于允许的最弱边相对中误差1/10万。
(3)、结论从上述平差结果的各项精度指标可以判定:南昌轨道工程一等GPS控制网的测量精度达到设计要求,完全满足《城市轨道交通工程测量规范》要求,5、GPS控制网基线边长检测为了保证轨道工程一等GPS控制网的可靠性,确保能够满足轨道工程施工要求,采用高精度全站仪leica1700,检测了3条GPS控制网的边长,经改正计算,并投影在轨道交通工程平面坐标系上,与GPS控制网的平差结果进行比较,情况如下:序号检测边平差结果S(m)检测S(m)△S(m)△S/S 限差备注1 DT1004—DT1007 2190.5657 2190.5756 -0.0099 1/22万1/10万符合要求2 DT1002—GPS013 2945.3905 2945.4002 -0.0097 1/30万1/10万符合要求3 DT1004—GPS003 2367.6596 2367.6587 0.0009 1/263万1/10万符合要求上表检测边长的相对中误差,精度高于《城市轨道交通工程测量规范》要求。