自动控制原理第六章课后习题答案
自动控制原理第6章习题解——邵世凡

习 题 66-1 设控制系统的开环传递函数为:()()()s s s s G 1.015.0110++= 绘出系统的Bode 图并求出相角裕量和幅值裕量。
若采用传递函数为(1+0.23s)/(1+0.023s)的串联校正装置,试求校正后系统的幅值和相角裕度,并讨论校正后系统的性能有何改进。
6—2设控制系统的开环频率特性为()()()()ωωωωωj j j j H j G 25.01625.011++= ①绘出系统的Bode 图,并确定系统的相角裕度和幅值裕度以及系统的稳定性; ②如引入传递函数()()()0125.025.005.0++=s s s G c 的相位滞后校正装置,试绘出校正后系统的Bode 图,并确定校正后系统的相角裕度和幅值裕度。
6 3设单位反馈系统的开环传递函数为()()()8210++=s s s s G 设计一校正装置,使静态速度误差系数K v =80,并使闭环主导极点位于s=-2±j23。
6-4设单位反馈系统的开环传递函数为()()()93++=s s s K s G ①如果要求系统在单位阶跃输入作用下的超凋量σ =20%,试确定K 值;②根据所确定的K 值,求出系统在单位阶跃输入下的调节时间t s 。
,以及静态速度误差系数; ③设计一串联校正装置,使系统K v ≥20,σ≤25%,t s 减少两倍以上。
6 5 已知单位反馈系统开环传递函数为()()()12.011.0++=s s s K s G 设计校正网络,使K v ≥30,γ≥40º,ωn ≥2.5,K g ≥8dB 。
6-6 由实验测得单位反馈二阶系统的单位阶跃响应如图6-38所示.要求①绘制系统的方框图,并标出参数值;②系统单位阶跃响应的超调量σ =20%,峰值时间t p =0.5s ,设计适当的校正环节并画出校正后系统的方框图。
6-7设原系统的开环传递函数为()()()15.012.010++=s s s s G 要求校正后系统的相角裕度γ=65º。
自动控制原理第六章课后习题答案(完整)

自动控制原理第六章课后习题答案(免费)线性定常系统的综合6-1 已知系统状态方程为:()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3.解: 由()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=可得:(1) 加入状态反馈阵()012K k k k =,闭环系统特征多项式为:32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+-(2) 根据给定的极点值,得期望特征多项式:*32()(1)(2)(3)6116f λλλλλλλ=+++=+++(3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k ===即:()408K =6-2 有系统:()2100111,0x x u y x•-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭= (1) 画出模拟结构图。
(2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。
解(1) 模拟结构图如下:(2) 判断系统的能控性;0111c U ⎡⎤=⎢⎥-⎣⎦满秩,系统完全能控,可以任意配置极点。
(3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为:()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式:*2()(3)(3)69f λλλλλ=++=++比较()f λ与*()f λ各对应项系数,可解得:011,3k k ==即:[1,3]K =6-3 设系统的传递函数为:(1)(2)(1)(2)(3)s s s s s -++-+试问可否用状态反馈将其传递函数变成:1(2)(3)s s s -++若能,试求状态反馈阵,并画出系统结构图。
自动控制原理 题库第六章 线性系统校正 习题

6-1证明RC 无源超前校正环节 最大超前相角为采用半对数坐标时最大超前相角所对应的频率位于两个转折频率的中间或等于零、极点乘积的平方根,即 6-2某单位反馈控制系统的设计指标为上升时间0.1r t ≤秒,超调量%16%σ≤,斜坡输入下的稳态误差0.05ssv e ≤。
(a )试问系统开环频率特性的低频段需要满足什么要求?中频段需要满足什么要求?(b )在s 平面内绘制出能满足设计要求的系统主导极点所在的区域。
6-3某系统框图如下图所示,误差c r e -=,01≥K ,02≥K 。
(a )要求系统对单位斜坡输入t t r =)(的稳态误差3.0≤,主导极点的阻尼比707.0≥ξ,调节时间 2.33s t ≤秒(按5%误差考虑),请在s 平面上绘制出满足上述设计要求的闭环极点的可行区域,给出1K 、2K 应满足的条件。
(b )设11=K 、2、10,绘制三种情况下以2K 为可变参数的根轨迹。
(c )设101=K ,确定满足(a )中性能指标的2K 的值。
6-4下图所示为钟摆的角度控制系统,其中被控对象为阻尼为零的二阶系统。
(a )试问控制器()c G s 必须满足什么条件,才能使系统为非条件稳定系统?(b )选用常规调节器,使得系统对阶跃扰动输入w 稳态误差为零,系统还可以做到非条件稳定吗?(c )选用PID 控制器应用根轨迹方法分析p k 、i T 和d k 发生变化时对系统快速性、稳定性的影响。
答案:应用关系12d i TT k T =和12p i TT k T +=容易给出分析结果。
6-5力、转矩的积分为速度、转速,速度、转速的积分为位置、转角,许多重要的运动控制系统的被控对象可以描述为二重积分器传递函数,即用根轨迹法分析比例控制p k 、比例微分控制(1)p d k k s k s +=+和超前校正(1)(12)k s s ++、(1)(9)k s s ++、(1)(4)k s s ++几种情况下闭环根轨迹的情况和闭环系统的性能。
自动控制原理(孟华)第6章习题答案(含过程)

第六章习题6-1.已知单位反馈控制系统的开环传递函数为)11.0(200)(+=s s s G试设计一个串联校正网络,使系统的相角裕量︒≥45γ,剪切频率s rad c /50≥ω。
解:方法一:原系统的截止频率为44.16rad/s ,相稳定裕度为180°-90°-arctan4.416=12.76°截止频率和相角裕度均不满足要求,需加入串联超前校正,选择校正网络的传递函数为TsaTsKs G c ++=11)(取校正后系统的截止频率s rad c /52=ω,相角裕度︒=50γ。
则Ta c 1=ω,6.2lg 10lg 20=+a K ,︒=+-+︒5011arctan11a a 由上述3式的64.0,01.0,4.4===K T a)101.0)(11.0()104.0(128)()(+++=s s s s s G s G c校正后系统的截止频率为s rad c /53=ω,相角裕度︒=5.49γ,满足要求。
方法二:按二阶系统最佳模型设计,设校正后系统的开环传递函数为)1()(+=Ts s Ks G则闭环系统的传递函数为222222//1/)(nn n s s T K Ts s TK K s Ts K s ωζωωφ++=++=++= 令50=K ,707.0=ζ由T n /12=ζω,T K n /2=ω,得01.0=T 。
即)101.0(50)()(+=s s s G s G c ,101.011.041)(++=s s s G c 。
易验证该校正环节满足要求。
6-2.已知单位反馈控制系统的开环传递函数为)104.0()(+=s s s G要求系统对单位斜坡输入信号的稳态误差%1≤ss e ,相角裕量为︒≥45γ,试确定系统串联校正网络。
解:本题可首先检验系统得性能指标,针对系统在性能上的缺陷并结合校正网络的作用,选用合适的校正网络,再按相应的步骤确定校正网络的参数。
自动控制原理题库第六章线性系统校正习题

自动控制原理题库第六章线性系统校正习题6-1证明RC无源超前校正环节1T11T1最大超前相角为Tz,1pT11采用半对数坐标时最大超前相角所对应的频率位于两个转折频率的中间或等于零、极点乘积marcin1的平方根,即m1Tzp6-2某单位反馈控制系统的设计指标为上升时间tr0.1秒,超调量%16%,斜坡输入下的稳态误差ev0.05。
(a)试问系统开环频率特性的低频段需要满足什么要求?中频段需要满足什么要求?(b)在平面内绘制出能满足设计要求的系统主导极点所在的区域。
6-3某系统框图如下图所示,误差erc,K10,K20。
rK1(2)c1K2(a)要求系统对单位斜坡输入r(t)t的稳态误差0.3,主导极点的阻尼比0.707,调节时间t2.33秒(按5%误差考虑),请在平面上绘制出满足上述设计要求的闭环极点的可行区域,给出K1、K2应满足的条件。
(b)设K11、2、10,绘制三种情况下以K2为可变参数的根轨迹。
(c)设K110,确定满足(a)中性能指标的K2的值。
6-4下图所示为钟摆的角度控制系统,其中被控对象为阻尼为零的二阶系统。
wrGc()112c(a)试问控制器Gc()必须满足什么条件,才能使系统为非条件稳定系统?(b)选用常规调节器,使得系统对阶跃扰动输入w稳态误差为零,系统还可以做到非条件稳定吗?(c)选用PID控制器Gc()kp1Tikd(T11)(T21)Ti应用根轨迹方法分析kp、Ti和kd发生变化时对系统快速性、稳定性的影响。
答案:应用关系T1T2kdTi和T1T2kpTi容易给出分析结果。
6-5力、转矩的积分为速度、转速,速度、转速的积分为位置、转角,许多重要的运动控制系统的被控对象可以描述为二重积分器传递函数,即G()12用根轨迹法分析比例控制kp、比例微分控制kpkdk(1)和超前校正k(1)(1、2k)(1)(9)、k(1)(4)几种情况下闭环根轨迹的情况和闭环系统的性能。
自控原理习题解答(第六章)(课堂PPT)

2
900 2 1 2025 2 1
yt Gj 0.8sin0.1t Gj
3.2 0.8
sin 0.1t 2tg130 0.1 tg1 45 0.1
900 0.12 1 2025 0.12 1
2.56 sin0.1t 143.13 77.47
10 21.25
0.056sin0.1t 220.6
1
GjHj
5 12
1 0.12 1 0.22 1 22
GjHj tg1 tg1 0.1- tg1 0.2 tg1 2
0 : M 5, 0
: M 0, 90 90 90 90 180
13
答6 41 3.MATLAB画法
GsHs
0.04s3
5s 1 0.62s2
kT1s 1
T2s 1
k
T1s
1
T2
1 s
1
R1 R2
k
R2 R1 R2
, T1
R1C, T2
R1R 2C R1 R2
T1 T2 , k 1
1
1 T1
2
1 T2
22
L dB
1
2
90 45
0
1
2
- 45
- 90
23
答6 5b
E0 s Ei s
R2
1 Cs
1 R 2 R1 Cs
R1
R
R1C1s 1R 2C2s 1 2C2s 1R 2C1s 1 R1C2s
R1C1s 1R 2C2s 1 R1C1R 2C2s 2 R1C1 R 2C2 R1C2
s
1
Tas 1Tbs 1 Ta Tbs 2 Ta Tb Ta Tb
(完整版)自动控制原理课后习题及答案
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
《自动控制原理》第六章习题答案
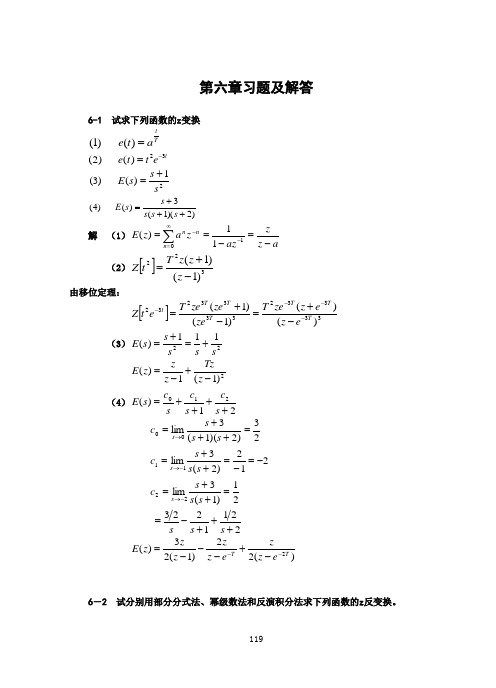
119第六章习题及解答6-1 试求下列函数的z 变换T ta t e =)()1(()()223e t t e t=- 21)()3(ss s E +=)2)(1(3)()4(+++=s s s s s E解 (1)∑∞=---=-==0111)(n nnaz z azza z E(2)[]322)1()1(-+=z z z T t Z由移位定理:[]333323333232)()()1()1(TTTTTTte z ez zeT ze ze zeT et Z -----+=-+=(3)22111)(ssss s E +=+=2)1(1)(-+-=z Tz z z z E (4)21)(210++++=s c s c sc s E21)1(3lim212)2(3lim23)2)(1(3lim221100=++=-=-=++==+++=-→-→→s s s c s s s c s s s c s s s2211223+++-=s s s)(22)1(23)(2TT e z ze z z z z z E ---+---=6-2 试分别用部分分式法、幂级数法和反演积分法求下列函数的z 反变换。
120()()()()11012E z z z z =-- 211213)()2(---+-+-=z zz z E 解 (1))2)(1(10)(--=z z zz E① 部分分式法)12(10210110)()2(10)1(10)(210110)2)(1(10)(-=⨯+⨯-=-+--=-+--=---=nnnT e z zz z z E z z z z zz E② 幂级数法:用长除法可得+-+-+-=+++=+-=--=---)3(70)2(30)(10)(7030102310)2)(1(10)(*3212T t T t T t t e z z z z z z z z z z E δδδ③ 反演积分法[][])()12(10)()12(10210110)(210110lim)(Re 10210lim)(Re 0*221111nT t t e nT e z zzz E s z z z z E s n nnnnnz z n nz z n --=-=⨯+⨯-=⨯=-=⋅-=-=⋅∑∞=→→-→→-δ(2) 2221)1()13(12)13(213)(-+-=+-+-=+-+-=--z z z z z z z zz zz E① 部分分式法∑∑∞=∞=---=-⎥⎦⎤⎢⎣⎡--=⨯--=----=----=--=0*222)()32()(32)()(132)(13)1(2)(13)1(2)1(31)(n n nT t n nT t nT Tt e t t Tt e z z z z z E z z z z zz E δδ121② 幂级数法:用长除法可得--------=-----=+-+-=---)3(9)2(7)(5)(3)(9753123)(*32122T t T t T t t t e zzzz z z z z E δδδδ③ 反演积分法[][]12111)3(lim!11)(Re )(-→→-⋅+-=⋅=n s z n zz zdzd z z E s nT e[]32)1(3lim 11--=++-=-→n nzz n n ns∑∞=---=*)()32()(n nT t n t e δ6-3 试确定下列函数的终值()()()11112E z Tzz =--- )208.0416.0)(1(792.0)()2(22+--=z z z zz E解 (1)∞=--=---→21111)1()1(lim zTz z e z ss(2)1208.0416.01792.0208.0416.0792.0lim)()1(lim 2211=+-=+-=-=→→z z zz E z e z z ss6-4 已知差分方程为c k c k c k ()()()-+++=4120初始条件:c(0)=0,c(1)=1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理第六章课后习题答案(免费)线性定常系统的综合6-1 已知系统状态方程为:()100102301010100x x uy x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3.解: 由()100102301010100x x uy x •-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=可得:(1) 加入状态反馈阵()012K k k k =,闭环系统特征多项式为:32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+-(2) 根据给定的极点值,得期望特征多项式:*32()(1)(2)(3)6116f λλλλλλλ=+++=+++(3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k ===即:()408K =6-2 有系统:()2100111,0x x u y x•-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭= (1) 画出模拟结构图。
(2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。
解(1) 模拟结构图如下:(2) 判断系统的能控性;0111c U ⎡⎤=⎢⎥-⎣⎦满秩,系统完全能控,可以任意配置极点。
(3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为:()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式:*2()(3)(3)69f λλλλλ=++=++比较()f λ与*()f λ各对应项系数,可解得:011,3k k ==即:[1,3]K =6-3 设系统的传递函数为:(1)(2)(1)(2)(3)s s s s s -++-+试问可否用状态反馈将其传递函数变成:1(2)(3)s s s -++若能,试求状态反馈阵,并画出系统结构图。
解:若希望采用状态反馈将(1)(2)(1)(2)(3)s s s s s -++-+变成1(2)(3)s s s -++,则根据状态反馈不改变系统传递函数的零点的原理,可知经过状态反馈之后的系统传递函数必为()()212(2)(3)s s s s -+++。
因此期望的特征多项式为232(2)(3)71612λλλλλ++=+++由于原系统的传递函数为232(1)(2)2(1)(2)(3)256s s s s s s s s s s -++-=+-++--,则状态反馈阵[]18215K =。
6-4 是判断下列系统通过状态反馈能否镇定。
210402105,00200517050A b -⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪⎪ ⎪==- ⎪ ⎪- ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭解:该系统为约旦标准型,很显然,其不能控不能所对应的特征值具有负实部,是渐进稳定的,因此可以通过状态反馈进行镇定。
6-5 设系统状态方程为:01000010100010001101x x u •⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪=+ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭(1) 判断系统能否稳定。
系统能否镇定。
(2) 若能,试设计状态反馈使之稳定。
解:(1)()4100010det 000100110I A λλλλλλλ-⎡⎤⎢⎥⎢⎥-===⎢⎥-⎢⎥⎣⎦= 原系统处于临界稳定状态。
010110100101110110c U ⎡⎤⎢⎥⎢⎥=⎢⎥--⎢⎥--⎣⎦,可知矩阵满秩,系统完全能控,所以可以通过状态反馈实现系统的镇定。
(2)自定义期望的系统极点,然后采用极点配置的方法进行即可。
6-6 设计一前馈补偿器,使系统:1112()11(1)s s W s s s s ⎛⎫ ⎪++⎪= ⎪ ⎪+⎝⎭解耦,且解耦后的极点为-1,-1,-2,-2.解:根据题意可知解耦后的系统传递函数矩阵为()()212101()102s W s s ⎛⎫⎪+ ⎪= ⎪⎪ ⎪+⎝⎭, 则前馈补偿器为()()()12211101121110(1)2d s s s W s s s s s -⎛⎫⎛⎫ ⎪ ⎪+++ ⎪⎪= ⎪ ⎪ ⎪ ⎪ ⎪+⎝⎭+⎝⎭, 所以()()()()()()2232122122d s s s s W s s s s s s +⎛⎫- ⎪++⎪= ⎪+- ⎪ ⎪+++⎝⎭6-7 已知系统:100100230110101100011x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎛⎫= ⎪⎝⎭(1) 判别系统能否用状态反馈实现解耦。
(2) 设计状态反馈使系统解耦,且极点为-1,-2,-3. 解:原系统的传递函数矩阵为:()()()()1101001010002301011101011011012s W s C sI A B s s s s s --+⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥=-=+⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥---⎣⎦⎣⎦⎡⎤⎢⎥+⎢⎥=⎢⎥⎢⎥++⎣⎦系统存在耦合。
下面判断系统能否通过状态反馈进行解耦:[][]0110101011001c A B ⎡⎤⎢⎥==≠⎢⎥⎢⎥-⎣⎦0,所以10d =;[][][][]02121001101000110010011023011010101c A B c A B ⎡⎤⎢⎥===⎢⎥⎢⎥-⎣⎦-⎡⎤⎡⎤⎢⎥⎢⎥=--=≠⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦00所以21d =。
因此1212100122d d c A D c A ⎡⎤⎡⎤==⎢⎥⎢⎥--⎣⎦⎣⎦,1010010011221001E DB ⎡⎤⎡⎤⎡⎤⎢⎥===⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎢⎥-⎣⎦, 可知E 为非奇异阵,所以该系统不能通过状态反馈的办法实现解耦。
6-8 已知系统:()01000110x x u y x•⎛⎫⎛⎫=+ ⎪ ⎪⎝⎭⎝⎭= 试设计一状态观测器,使观测器的极点为-r,-2r(r>0). 解 (1) 检验能观性因10,,01o c U cA ⎛⎫⎛⎫== ⎪ ⎪⎝⎭⎝⎭满秩系统能观可构造全维观测器.(2) 原系统的对偶系统为:[]001,,01100TT TA c b ⎡⎤⎡⎤===⎢⎥⎢⎥⎣⎦⎣⎦()201det ,0,0T I A a a λλ-===所以另观测器的期望多项式为()()22232r r r r λλλλ++=++则2012,3a r a r **==所以()22,3T KE r r ==下面求转换矩阵1100101100110T TT T TTP A cc A cc P -⎡⎤⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤=⎢⎥⎣⎦所以原系统对应的()1222012,3321032TTE E P r r r r r E r -⎡⎤⎡⎤=⋅==⎢⎥⎣⎦⎣⎦⎡⎤=⎢⎥⎣⎦对应的全维观测器为:223103ˆˆ()2012rr x A Ec x bu Ey x u y r r -⎛⎫⎛⎫⎛⎫=-++=++ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭6-9* 已知系统:()21001110x x uy x•-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭= 设状态变量2x 不能测取,试设计全维和降维观测器,使观测器极点为-3,-3.解:[]201,,01110TT TA c b -⎡⎤⎡⎤===⎢⎥⎢⎥-⎣⎦⎣⎦()201det 32,2,3T I A a a λλλ-=++==所以另观测器的期望多项式为()22369λλλ+=++则019,6a a **==所以()7,3T KE ==下面求转换矩阵1101131100111T TT T TTP A cc A cc P -⎡⎤⎡⎤⎡⎤⎡⎤===⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤=⎢⎥-⎣⎦所以原系统对应的()[]1017,3341134TTE E P E -⎡⎤=⋅==⎢⎥-⎣⎦⎡⎤=⎢⎥⎣⎦对应的全维观测器为:5103ˆˆ()4114x A Ec x bu Ey x u y -⎛⎫⎛⎫⎛⎫=-++=++ ⎪ ⎪ ⎪--⎝⎭⎝⎭⎝⎭6-11* 设受控对象传递函数为31s : (1)设计状态反馈,使闭环极点配置为13,2--± 解:期望的特征多项式为()3201211344322223,4,4j j a a a λλλλλλ***⎛⎫⎛⎫++-++=+++ ⎪⎪⎝⎭⎝⎭=== 原系统0120,0,0a a a ===所以[]344K=。