机器人的位姿描述与坐标变换资料
合集下载
第3章 位姿描述和齐次变换

ZB ZA YB
P
AP
XB
OA
YA
A
参考坐标系{A}
机器人研究所
4
第1节 位置和姿态的表示
位置描述(Description of Position)
px A p p y pz
Ap
zA
{A}
p
A
p
:p点在坐标系{A}中的表示,
xA
oA
yA
也称作位置矢量。
图1 位置表示
齐次的,将其等价为齐次变换形式:
A A p B R | A pBo B p 0 0 0 | 1 1 1
A A B p B R p A pBo A
直角坐标
齐次坐标
等价于
p A BT
B
p
11
齐次变换
机器人研究所
22
第3节 齐次坐标变换
机器人研究所14坐标变换复合变换compositetransform机器人研究所15例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所16例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所17例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所18例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述3030086605303030050866坐标变换机器人研究所19例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所20例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述0866051211098050866坐标变换第第33节节齐次坐标变换齐次坐标变换旋转变换通式第三章位姿描述和齐次变换机器人研究所22齐次坐标变换齐次坐标和齐次变换坐标变换式中对于点是非齐次的将其等价为齐次变换形式
P
AP
XB
OA
YA
A
参考坐标系{A}
机器人研究所
4
第1节 位置和姿态的表示
位置描述(Description of Position)
px A p p y pz
Ap
zA
{A}
p
A
p
:p点在坐标系{A}中的表示,
xA
oA
yA
也称作位置矢量。
图1 位置表示
齐次的,将其等价为齐次变换形式:
A A p B R | A pBo B p 0 0 0 | 1 1 1
A A B p B R p A pBo A
直角坐标
齐次坐标
等价于
p A BT
B
p
11
齐次变换
机器人研究所
22
第3节 齐次坐标变换
机器人研究所14坐标变换复合变换compositetransform机器人研究所15例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所16例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所17例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所18例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述3030086605303030050866坐标变换机器人研究所19例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述坐标变换机器人研究所20例21已知坐标系b的初始位姿与a重合首先b相对于坐标系a的zb0和旋转矩阵求它在坐标系a中的描述0866051211098050866坐标变换第第33节节齐次坐标变换齐次坐标变换旋转变换通式第三章位姿描述和齐次变换机器人研究所22齐次坐标变换齐次坐标和齐次变换坐标变换式中对于点是非齐次的将其等价为齐次变换形式
机器人的空间描述与坐标变换
3
2.2平移和旋转坐标系映 射
1.平移坐标变换
BP为坐标系{B}描述的某一空间位
{B}
置,我们也可以用AP(坐标系{A})描 述同一空间位置。因为两个坐标系具有 相同的姿态,同一个点在不同坐标系下 的描述满足以下关系
A
B
P
{A}
A
P OB
A
PBO
P B P A PBo
(2-4)
OA
图2-3平移变换
第二章 机器人的空间描述和坐标变换
2.1 位姿和坐标系描述
2.2平移和旋转坐标系映射 2.3平移和旋转齐次坐标变换 2.4物体的变换和变换方程 2.5通用旋转变换
1
2.1位置方位表示与坐标系描述
1.位置描述
矢量 Ap 表示箭头指向点的位置矢量,其 中右上角标“A”表示该点是用{A}坐标系描述 的。 px
注:固定坐标系变换,矩阵乘的顺序“自右向左”
13
2.4物体的变换和变换方程
已知坐标系{B}相对坐标系{A}的描述 求坐标系{A}相对坐标系{B}的描述
B A
A B
T
即齐次变换的求逆问题。
T
一种直接的方法是矩阵求逆,另一种方法是根据变换矩阵的特点直 接得出逆变换。后一种方法更简单方便。
给定 A 计算 BT
ZA
q
P1 XA
图2-7旋转算子
0 sq 1 0 0 cq 0 0
0 0 0 1
9
定义了平移算子和旋转算子以后,可以将它们复合实现复杂的映射 关系。变换算子与前面介绍的坐标变换矩阵形式完全相同,因为所有描 述均在同一坐标系下,所以不需上下标描述(坐标系)。
机器人的位姿描述与坐标变换

0
1
0
⎥ ⎥
⎢⎣− sinθ 0 cosθ ⎥⎦
Zi Zj
θ
θ Xi
Xj
Yi Y j
⎡cosθ − sinθ 0⎤
j i
R(Zi
,θ
)
=
⎢⎢sinθ
cosθ
0⎥⎥
⎢⎣ 0
0 1⎥⎦
Zi Zj
θ
Xi Xj
Yj
θ
Yi
⎡1 0
0⎤
j i
R(
X
i
,θ
)
=
⎢⎢0
cosθ
−
sinθ
⎥ ⎥
⎢⎣0 sinθ cosθ ⎥⎦
¥ ¥假设机器人的连杆和关节都是刚体¥ ¥
位置矢量
⎡x0 ⎤
P o '
o
=
⎢ ⎢
y0
⎥ ⎥
⎢⎣ z0 ⎥⎦
Z b Z'
O' Y' t n X' O
X Y
姿态矢量
O' O
R
=
[
O' O
X
OO'Y
⎡cos(∠X ' X )
O' O
Z
]3×3
=
⎢ ⎢
cos(∠X
'Y
)
⎢⎣cos(∠X ' Z )
单位主矢量
cos(∠Y ' X ) cos(∠Y 'Y ) cos(∠Z ' Z )
cos(∠Z ' X )⎤
cos(∠Z
'Y
)
⎥ ⎥
cos(∠Z ' Z ) ⎥⎦
姿态矩阵R的特点:
机器人导论第二章 空间描述和变换
❖为什么要引进齐次坐标,它有什么优点?
❖机器人的坐标变换主要包括平移和旋转变换,平移是矩 阵相加运算,旋转则是矩阵相乘,综合起来可以表示为p’ = m1*p + m2(m1旋转矩阵,m2为平移矩阵,p为原向量,p’ 为变换后的向量).引入齐次坐标的目的主要是合并矩阵 运算中的乘法和加法,合并后可以表示为p' = M*p的形式. 即它提供了用矩阵运算把二维、三维甚至高维空间中的 一个点集从一个坐标系变换到另一个坐标系的有效方法.
A
P
BP
PA BORG
这个例子说明了如何将一个矢量从 一个坐标系映射到另一个坐标系。 映射的概念,即描述一个坐标系到 另一个坐标系的变换。
两个坐标系具有相同的姿态
关于旋转坐标系的映射
❖ 我们已知矢量相对于某坐标系{B}的定义 BP ,怎样求矢量相对 另一个坐标系{A}的定义 AP ?且这两个坐标系原点重合。
{B}绕 Zˆ 轴旋转30度
0.866
A B
R
0.500
0.000
0.500 0.866 0.000
0.000 0.000 1.000
0.0
已知:
B P 2.0
0.0
1.000
求出
AP
:
A
P BAR BP
1.732
0.000
❖齐次坐标
❖所谓齐次坐标就是将一个原本是n维的向量用一个n+1 维向量来表示.有一个特定的投影附加于n维空间,也可以 把它看作一个附加于每个矢量的比例系数.
❖三维直 v x y zT ❖齐次 v wx wy wz wT
❖角坐标
❖坐标
显然,齐次坐标表达并不是唯一的,随w值的不同而不同. 在计算机图学中,w 作为通用比例因子,它可取任意正值, 但在机器人的运动分析中,总是取w=1.
[课件](工业机器人)位姿描述与齐次变换PPT
位姿描述与齐次变换PPT](https://img.taocdn.com/s3/m/711ba841caaedd3383c4d3c4.png)
六、齐次表达
根据几何学知识,上面第四小节中给定点的绝对位置为:
Ap b a b a b a c s cs b a
写成三维形式,有:
a a a c s 0a Apbbbs c 0b
3. 试按照运动顺序计算相关基本变换矩阵相乘结果
c s 0 a
Tra(An a,A sb,A0)Ro(zA t,)s0
c
0
0 b 1 0
0
1
4. 计算结果比较
两种方法结果相同!但后一种方法简单!
问题:是否仅仅按照运动变换顺序将相关的基本变 换矩阵相乘,即可以得到齐次变换阵?
0 0 0 0 0 10
O B 在A中位置,记作 A pOB
B在
A 中姿态,记作
A B
R
。
分成两块,不便于记忆!
齐次变换矩阵
若写成如下齐次形式,有:
c s 0 aa
A 1ps0 0
c
0 0
0 1 0
A 中的位置,然后与
b
A坐标原点值相加即可
得到该点绝对位置。
OA
由几何法,得:
aacbs 写成矩阵形式
b as bc
Y A
YB
b
b
XB a
OB
a
X A
a
XA
相
a c sa 对
bs cb
坐 标 值
b 1 0b 1 0B A 0R
Ap 1OBB 1pA BTB 1p
七、齐次变换矩阵
1. 构成:分为4块。左上角是姿态矩阵,为一单位正交 矩阵;右上角为对象坐标系原点位置值;左下角为 三个0 0 0,简记为0;右下角为1。
根据几何学知识,上面第四小节中给定点的绝对位置为:
Ap b a b a b a c s cs b a
写成三维形式,有:
a a a c s 0a Apbbbs c 0b
3. 试按照运动顺序计算相关基本变换矩阵相乘结果
c s 0 a
Tra(An a,A sb,A0)Ro(zA t,)s0
c
0
0 b 1 0
0
1
4. 计算结果比较
两种方法结果相同!但后一种方法简单!
问题:是否仅仅按照运动变换顺序将相关的基本变 换矩阵相乘,即可以得到齐次变换阵?
0 0 0 0 0 10
O B 在A中位置,记作 A pOB
B在
A 中姿态,记作
A B
R
。
分成两块,不便于记忆!
齐次变换矩阵
若写成如下齐次形式,有:
c s 0 aa
A 1ps0 0
c
0 0
0 1 0
A 中的位置,然后与
b
A坐标原点值相加即可
得到该点绝对位置。
OA
由几何法,得:
aacbs 写成矩阵形式
b as bc
Y A
YB
b
b
XB a
OB
a
X A
a
XA
相
a c sa 对
bs cb
坐 标 值
b 1 0b 1 0B A 0R
Ap 1OBB 1pA BTB 1p
七、齐次变换矩阵
1. 构成:分为4块。左上角是姿态矩阵,为一单位正交 矩阵;右上角为对象坐标系原点位置值;左下角为 三个0 0 0,简记为0;右下角为1。
第3章 机器人位姿的数学描述与坐标变换

x=a(1-cos) , y=a(1-sinθ)
第3章 机器人位姿的数学描述与坐标变换
3.1 机器人位姿的数学描述
#假设机器人的连杆和关节都是刚体 (1)首先,建立一个参考坐标系; (2)然后,在刚体上任意建立一个刚体坐标系。
Z Z'
O' Y'
O
X'
X Y
第3章 机器人位姿的数学描述与坐标变换
刚体位置:
,
)
=
?
j i
R(,q
,
)
=
R(Z
,
)
R(Y
,q
)R(Z
,
)
绕动坐标轴依次转动时,每 个旋转矩阵要从左往右乘。
Z2
Zj
Zi (Z1)
q
q
Yj
(Y2 )
q Y1
Yi
Xi
X1 X2 X j
第3章 机器人位姿的数学描述与坐标变换
cos − sin 0 cosq 0 sinq cos − sin 0
R(Z
i
,q
)
=
s
inq
cosq
0
0
0 1
Zi Zj
q Xi
Xj
Yj q
Yi
第3章 机器人位姿的数学描述与坐标变换
1 0
0
j i
R(
X
i
,q
)
=
0
cosq
−
s in q
0 sinq cosq
cosq 0 sinq
j i
R(Yi
,q
)
=
0
1
0
− sinq 0 cosq
机器人运动学-1位姿表示,坐标变换 第五讲 数理基础共27页
(3)一般求法
若
nx ox ax px
T
n
y
oy
ay
p
y
nz 0
oz 0
az 0
pz 1
则
nx ny nz p n
T1 ox oy oz p o
a0x
ay 0
az 0
p a
1
p p x p y p z T , n n x n y n z T , o o x o y o z T , a a x a y a z T
二、坐标变换
1.平移坐标变换 坐标系{A}和{B}
具有相同的方位,但 原点不重合.则点P在 两个坐标系中的位置 矢量满足下式:
APBPAPB0
二、坐标变换
2.旋转变换 坐标系{A}和{B}
有相同的原点但方位 不同,则点P的在两个 坐标系中的位置矢量 有如下关系:
APB ARBP
BPBARAP B ARB AR1B ART
例4.1 已知坐标系{B}的初始位姿与{A}重合,首先{B}
相对于{A}的ZA轴转30°,再沿{A}的XA轴移动12单位, 并沿{A}的YA轴移动6单位。求位置矢量APB0和旋转矩阵 BAR。设点p在{B}坐标系中的位置为BP=[3,7,0],求它 在坐标系{A}中的位置。
0.8660.5 0
12
B ARR(z,30 0)0.5 0.8660;ApB06
二、坐标变换
P
3.复合变换
yB
yC
BP
xB
yA
AP
OB
xC
APBO zC
OA
xA
zB
zA
坐标系A和C之间是平移变换关系 APCPAPC0
3机器人的位姿描述与坐标变换
利用旋转矩阵的正交性质:
假设:
整理得:
旋转变换通式
讨论:
(1)
(2)
(3)
例:坐标系B原来与A重合,将坐标系B绕过原点O的轴线
转动
,求旋转矩阵
解答:
1)
2)
3)带入旋转通式得:
2、等效转轴与等效转角
转轴和转角
旋转矩阵
1
2?
1)将方程两边矩阵的主对角线元素分别相加,则
2)将方程两边矩阵的非对角线元素成对相减得:
►绕多个坐标轴旋转的转动矩阵
1)、绕固定坐标系旋转
2)、绕运动坐标系旋转
ZYZ欧拉角
注意:多个旋转矩阵连乘时,次序不同则含义不同。1)绕新的动坐标轴依次转动时,每个旋转矩阵要从左往右乘,即旋转矩阵的相乘顺序与转动次序相同;2)绕旧的固定坐标轴依次转动时,每个旋转矩阵要从右往左乘,即旋转矩阵的相乘顺序与转动次序相反。
解:
1)
2)
Z
i
X
i
Y
i
P
坐标系j由坐标系i旋转而成
求点P在i坐标系的坐标:
已知点P在j坐标系的坐标:
P
☺
►姿态矢量矩阵
坐标系j相对于i的方位
旋转矩阵的性质:
旋转矩阵
►绕一个坐标轴旋转的转动矩阵
1)RX
2)RY
3)RZ
转动矩阵的特点:(1) 主对角线上有一个元素为1,其余均为转角的余弦/正弦;(2) 绕轴转动的次序与元素1所在的行、列号对应;(3) 元素1所在的行、列,其它元素均为0;(4) 从元素1所在行起,自上而下,先出现的正弦为负,后出现的为正,反之依然。
2、变换矩阵T的相乘 ★矩阵相乘的顺序一般不可换,特殊可换的情况为变换都是同参考系下的平移或绕同一坐标轴的旋转。
假设:
整理得:
旋转变换通式
讨论:
(1)
(2)
(3)
例:坐标系B原来与A重合,将坐标系B绕过原点O的轴线
转动
,求旋转矩阵
解答:
1)
2)
3)带入旋转通式得:
2、等效转轴与等效转角
转轴和转角
旋转矩阵
1
2?
1)将方程两边矩阵的主对角线元素分别相加,则
2)将方程两边矩阵的非对角线元素成对相减得:
►绕多个坐标轴旋转的转动矩阵
1)、绕固定坐标系旋转
2)、绕运动坐标系旋转
ZYZ欧拉角
注意:多个旋转矩阵连乘时,次序不同则含义不同。1)绕新的动坐标轴依次转动时,每个旋转矩阵要从左往右乘,即旋转矩阵的相乘顺序与转动次序相同;2)绕旧的固定坐标轴依次转动时,每个旋转矩阵要从右往左乘,即旋转矩阵的相乘顺序与转动次序相反。
解:
1)
2)
Z
i
X
i
Y
i
P
坐标系j由坐标系i旋转而成
求点P在i坐标系的坐标:
已知点P在j坐标系的坐标:
P
☺
►姿态矢量矩阵
坐标系j相对于i的方位
旋转矩阵的性质:
旋转矩阵
►绕一个坐标轴旋转的转动矩阵
1)RX
2)RY
3)RZ
转动矩阵的特点:(1) 主对角线上有一个元素为1,其余均为转角的余弦/正弦;(2) 绕轴转动的次序与元素1所在的行、列号对应;(3) 元素1所在的行、列,其它元素均为0;(4) 从元素1所在行起,自上而下,先出现的正弦为负,后出现的为正,反之依然。
2、变换矩阵T的相乘 ★矩阵相乘的顺序一般不可换,特殊可换的情况为变换都是同参考系下的平移或绕同一坐标轴的旋转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Xj
Zj
P
Oj
Yj
Zi
Oi P OiO j O j P
i
Oj i
P
P P P
Oj i j
Xi
Oi
Yi
沿着不同轴向的组合平移:
x 0 0 x 0 y 0 y Oj P i 0 0 z z
T
2、坐标旋转(坐标系原点相同)
Zj
Zi
P
坐标系j由坐标系i旋转而成 已知点P在j坐标系的坐标:
Yj
j
P [x j
yj
z j ]T
Yi
Xi Xj
求点P在i坐标系的坐标:
i
P [ xi
yi
zi ]T
Zj
Zi
zi
P
yj
zj
Yj
xi
Xi Xj
yi
Yi
xj
☺ 关于(Yi , X j )?
yi x j cos(Yi , X j ) yi x j cos(Yi , X j ) y j cos(Yi , Y j ) yi x j cos(Yi , X j ) y j cos(Yi , Y j ) z j cos(Yi , Z j )
cos(X ' X ) cos(Y ' X ) cos(Z ' X ) cos(X ' Y ) cos(Y ' Y ) cos(Z ' Y ) O' O' O' O' R [ X Y Z ] O O O O 33 cos(X ' Z ) cos(Y ' Z ) cos(Z ' Z ) 姿态矩阵R的特点:
适用的机器人类型举例(有平移关节)
Z1
X1
Y1 Z2
Y2
X2
Z3 Y3
X3
三坐标的直角坐标机器人
Z
Y
X
Zi
Zj
例: Oi
Yi Xi Xj
P
Oj
Yj
15 已知
j
P 5 6 7
T
求 P点在i坐标系中的坐标。
T T
解答: i P j P OjP
i
5 21 7
5 6 7 0 15 0
X
Z b
Z'
O' Y' t
O
n
X' Y
i
P R P
j i j
坐标系j相对 于i的方位
旋转矩阵
i到j的旋转矩阵=j相对i的姿态
旋转矩阵的性质:
j i
R R R
i j 1 i j
位置 j P ? 齐次变换矩阵 jiT 表示 位姿
T
绕X、Y、Z轴的旋转矩阵已经公式化,即此时的位姿公式化
►绕一个坐标轴旋转的转动矩阵
R是单位正交阵
O' O
R 1
刚体的位置和姿态:
' {O'} {O O R, 体j在参考系i中的 位置 姿态
Oj Oi
oj oi
P?
R?
Xj Zi
Oj
Yj
6
10
Xi
Oi
Yi
3-2 坐标变换(点的映射)
1、坐标平移(坐标系方位相同)
已知点P在j坐标系的坐标,平移j至i,求 点P在i坐标系的坐标。
X
n
Y' t
X' Y
刚体姿态 :O ' O' O' R [ X O O OY
单位主矢量
cos(X ' X ) cos(Y ' X ) cos(Z ' X ) cos(X ' Y ) cos(Y ' Y ) cos(Z ' Y ) O' Z ] O 33 cos(X ' Z ) cos(Y ' Z ) cos(Z ' Z )
Zj
Zi
zi
P
zj
yj
Yj
xi
Xi
yi
Yi
xj
Xj
xi x j cos(X i , X j ) y j cos(X i , Y j ) z j cos(X i , Z j ) i P yi x j cos(Yi , X j ) y j cos(Yi , Y j ) z j cos(Yi , Z j ) z x cos(Z , X ) y cos(Z , Y ) z cos(Z , Z ) j i j j i j j i j i
cos(X i , X j ) cos(X i , Y j ) cos(X i , Z j ) x j i P cos(Yi , X j ) cos(Yi , Y j ) cos(Yi , Z j ) y j cos(Z , X ) cos(Z , Y ) cos(Z , Z ) z i j i j i j j
j i
R
j
P
►姿态矢量矩阵
cos(X ' X ) cos(Y ' X ) cos(Z ' X ) cos(X ' Y ) cos(Y ' Y ) cos(Z ' Y ) O' R O cos(X ' Z ) cos(Y ' Z ) cos(Z ' Z )
☺
9个元素,只有3个独立, 满足6个约束条件:
O' O O' O ' X .O OX O' O ' Y .O OY ' O' O O Z .O Z 1 ' O' O' O' O' X .O Y Y . Z O O O O Z .O X 0
' T R 1 O OR
☺
O' O
《机器人学》
第三章 机器人的位姿描述与坐标变换
战强
北京航空航天大学机器人研究所
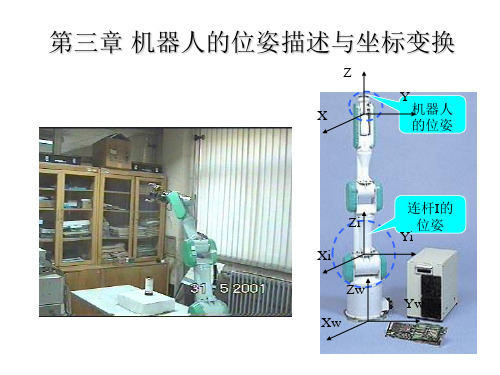
第三章 机器人的位姿描述与坐标变换
Z Y X 机器人 的位姿
Zi Xi
连杆I的 位姿 Yi
Zw Xw
Yw
3-1 刚体位姿的数学描述
¥ ¥假设机器人的连杆和关节都是刚体¥ ¥
Z b Z' O' O
刚体位置 :
x0 y o' P o 0 z0
Z Zi
j
Zi
Zj
Yj
q q
q
Yi Y j
Yi Xi Xi X
j
q
Xj
1)RX
Zi
Zj
2)RY
Yj
q
q
Xi Yi
Xj
3)RZ
Z
Zi
j
q q
Yj Yi
Xi
Xj
cos(X i , X j ) cos(X i , Y j ) cos(X i , Z j ) x j i P cos(Yi , X j ) cos(Yi , Y j ) cos(Yi , Z j ) y j cos(Z , X ) cos(Z , Y ) cos(Z , Z ) z i j i j i j j
Zj
P
Oj
Yj
Zi
Oi P OiO j O j P
i
Oj i
P
P P P
Oj i j
Xi
Oi
Yi
沿着不同轴向的组合平移:
x 0 0 x 0 y 0 y Oj P i 0 0 z z
T
2、坐标旋转(坐标系原点相同)
Zj
Zi
P
坐标系j由坐标系i旋转而成 已知点P在j坐标系的坐标:
Yj
j
P [x j
yj
z j ]T
Yi
Xi Xj
求点P在i坐标系的坐标:
i
P [ xi
yi
zi ]T
Zj
Zi
zi
P
yj
zj
Yj
xi
Xi Xj
yi
Yi
xj
☺ 关于(Yi , X j )?
yi x j cos(Yi , X j ) yi x j cos(Yi , X j ) y j cos(Yi , Y j ) yi x j cos(Yi , X j ) y j cos(Yi , Y j ) z j cos(Yi , Z j )
cos(X ' X ) cos(Y ' X ) cos(Z ' X ) cos(X ' Y ) cos(Y ' Y ) cos(Z ' Y ) O' O' O' O' R [ X Y Z ] O O O O 33 cos(X ' Z ) cos(Y ' Z ) cos(Z ' Z ) 姿态矩阵R的特点:
适用的机器人类型举例(有平移关节)
Z1
X1
Y1 Z2
Y2
X2
Z3 Y3
X3
三坐标的直角坐标机器人
Z
Y
X
Zi
Zj
例: Oi
Yi Xi Xj
P
Oj
Yj
15 已知
j
P 5 6 7
T
求 P点在i坐标系中的坐标。
T T
解答: i P j P OjP
i
5 21 7
5 6 7 0 15 0
X
Z b
Z'
O' Y' t
O
n
X' Y
i
P R P
j i j
坐标系j相对 于i的方位
旋转矩阵
i到j的旋转矩阵=j相对i的姿态
旋转矩阵的性质:
j i
R R R
i j 1 i j
位置 j P ? 齐次变换矩阵 jiT 表示 位姿
T
绕X、Y、Z轴的旋转矩阵已经公式化,即此时的位姿公式化
►绕一个坐标轴旋转的转动矩阵
R是单位正交阵
O' O
R 1
刚体的位置和姿态:
' {O'} {O O R, 体j在参考系i中的 位置 姿态
Oj Oi
oj oi
P?
R?
Xj Zi
Oj
Yj
6
10
Xi
Oi
Yi
3-2 坐标变换(点的映射)
1、坐标平移(坐标系方位相同)
已知点P在j坐标系的坐标,平移j至i,求 点P在i坐标系的坐标。
X
n
Y' t
X' Y
刚体姿态 :O ' O' O' R [ X O O OY
单位主矢量
cos(X ' X ) cos(Y ' X ) cos(Z ' X ) cos(X ' Y ) cos(Y ' Y ) cos(Z ' Y ) O' Z ] O 33 cos(X ' Z ) cos(Y ' Z ) cos(Z ' Z )
Zj
Zi
zi
P
zj
yj
Yj
xi
Xi
yi
Yi
xj
Xj
xi x j cos(X i , X j ) y j cos(X i , Y j ) z j cos(X i , Z j ) i P yi x j cos(Yi , X j ) y j cos(Yi , Y j ) z j cos(Yi , Z j ) z x cos(Z , X ) y cos(Z , Y ) z cos(Z , Z ) j i j j i j j i j i
cos(X i , X j ) cos(X i , Y j ) cos(X i , Z j ) x j i P cos(Yi , X j ) cos(Yi , Y j ) cos(Yi , Z j ) y j cos(Z , X ) cos(Z , Y ) cos(Z , Z ) z i j i j i j j
j i
R
j
P
►姿态矢量矩阵
cos(X ' X ) cos(Y ' X ) cos(Z ' X ) cos(X ' Y ) cos(Y ' Y ) cos(Z ' Y ) O' R O cos(X ' Z ) cos(Y ' Z ) cos(Z ' Z )
☺
9个元素,只有3个独立, 满足6个约束条件:
O' O O' O ' X .O OX O' O ' Y .O OY ' O' O O Z .O Z 1 ' O' O' O' O' X .O Y Y . Z O O O O Z .O X 0
' T R 1 O OR
☺
O' O
《机器人学》
第三章 机器人的位姿描述与坐标变换
战强
北京航空航天大学机器人研究所
第三章 机器人的位姿描述与坐标变换
Z Y X 机器人 的位姿
Zi Xi
连杆I的 位姿 Yi
Zw Xw
Yw
3-1 刚体位姿的数学描述
¥ ¥假设机器人的连杆和关节都是刚体¥ ¥
Z b Z' O' O
刚体位置 :
x0 y o' P o 0 z0
Z Zi
j
Zi
Zj
Yj
q q
q
Yi Y j
Yi Xi Xi X
j
q
Xj
1)RX
Zi
Zj
2)RY
Yj
q
q
Xi Yi
Xj
3)RZ
Z
Zi
j
q q
Yj Yi
Xi
Xj
cos(X i , X j ) cos(X i , Y j ) cos(X i , Z j ) x j i P cos(Yi , X j ) cos(Yi , Y j ) cos(Yi , Z j ) y j cos(Z , X ) cos(Z , Y ) cos(Z , Z ) z i j i j i j j