温度控制实验
温度控制的实验报告
温度控制的实验报告1. 引言温度是物体分子热运动的表现,是许多实验和工业过程中需要精确控制的一个变量。
本实验旨在研究温度控制的原理和方法,通过实验验证不同温控设备的性能,并对温度控制的误差进行分析。
2. 实验目的1. 了解温度控制的基本原理和方法;2. 掌握温度控制设备的操作方法;3. 分析温度控制的误差来源,并提出改进方案。
3. 实验装置和材料- 温度控制设备:恒温水浴器、温度计;- 反应容器:玻璃烧杯、烧杯夹;- 实验溶液:蒸馏水。
4. 实验步骤1. 将恒温水浴器放在实验台上,接通电源并调整温度设置;2. 在玻璃烧杯中加入适量蒸馏水;3. 将烧杯夹固定在温水浴器外壁上,并将玻璃烧杯置于夹子中,使其与恒温水浴器中的水接触;4. 等待一段时间,使烧杯中的水温稳定在设定的温度;5. 用温度计测量烧杯中水的实际温度,并记录下来;6. 根据测量结果,分析温度控制设备的误差和准确度。
5. 实验结果设置温度() 实际温度():: ::30 29.540 39.850 49.960 59.76. 结果分析通过实验结果可以看出,温度控制设备在大部分情况下能够实现较为准确的温度控制,但仍存在一定的误差。
可能的误差来源包括:1. 温度计的准确度:温度计本身存在一定的误差,会对实际温度测量结果产生影响;2. 温度控制设备的稳定性:恒温水浴器在调整温度过程中可能存在波动,导致实际温度与设定温度不完全一致;3. 烧杯和夹子的传热性能:烧杯与恒温水浴器之间的传热效果可能存在差异,影响实际温度的稳定性。
为减小温度控制误差,可以采取以下改进措施:1. 使用更加精准的温度计进行测量,减小温度计本身误差对实验结果的影响;2. 对恒温水浴器进行进一步调试,提高其温度控制的稳定性;3. 优化烧杯与夹子之间的接触条件,改善传热效果。
7. 结论通过本实验的探究,我们对温度控制的原理和方法有了更深入的了解,并掌握了温度控制设备的操作方法。
温度闭环控制实验心得
温度闭环控制实验心得一、实验目的本次实验的目的是学习温度闭环控制系统的原理和实现方法,掌握PID控制器的调参方法,并能够通过实验验证PID控制器对温度的控制效果。
二、实验原理1. 温度传感器本次实验使用的是热电偶温度传感器。
热电偶是一种利用热电效应测量温度的传感器,由两种不同金属或合金组成,当两种金属或合金接触时,在接触点处会形成一个电动势。
随着温度变化,电动势也会发生变化,从而可以测量出温度。
2. PID控制器PID控制器是一种常用的闭环控制系统。
它通过不断地调整输出信号来使被控对象达到期望值。
PID控制器由比例环节、积分环节和微分环节三部分组成。
其中比例环节根据误差大小调整输出信号;积分环节根据误差累计值调整输出信号;微分环节根据误差变化率调整输出信号。
3. 温度闭环控制系统温度闭环控制系统是一种将温度传感器和PID控制器结合起来的系统。
温度传感器负责测量被控对象的温度,PID控制器则根据温度误差调整输出信号,使被控对象的温度达到期望值。
三、实验步骤1. 搭建实验平台首先需要搭建实验平台。
本次实验使用的是Arduino开发板和温度传感器模块。
将Arduino开发板与电脑连接,并将温度传感器模块连接到开发板上。
2. 编写程序编写程序,用Arduino开发板读取温度传感器模块的输出信号,并通过PID控制器调整输出信号,从而控制被控对象的温度。
在编写程序时需要设置PID参数,包括比例系数、积分时间和微分时间等。
3. 调试程序将被控对象(例如加热棒)连接到开发板上,并将温度传感器放置在被控对象附近。
启动程序并进行调试,观察被控对象的温度变化情况,并根据需要调整PID参数以达到更好的控制效果。
4. 实验验证进行实验验证,观察PID控制器对被控对象温度的控制效果,并记录数据以便后续分析和总结。
四、实验心得本次实验让我深入了解了温度闭环控制系统的原理和实现方法。
通过编写程序和调试参数,我成功地将PID控制器应用于温度控制中,并取得了不错的效果。
温度控制
环系统。需注意的是运放的锁零信号 G 接-15V。 (1)将 ACCT-II 面板上 U1 单元的可调电压接到 Ug; (2)给定输出接 PID 调节器的输入,这里参考电路中 Kd=0,R4 的作用是提高 PI 调节 器的动态特性。 (3)经过 PID 运算调节器输出(0~10V)接到 ACCT-III 面板上温度的检测和控制单 元的脉宽调制的输入端 Uin 两端, 脉宽调制后输出的电压作为加温室里电热丝加热的输入电 压。 (4)温度变送器通过检测 Cu50 热敏电阻的温度,然后转换成电压信号,作为反馈信 号。温度变送器的输出 U0 接到电压反馈输入端,同时接到电压表的输入端,通过电压表来 观测相应的温度的变化。 (5)由于温度变送器的输出的电压为正值,所以反馈回路中接一个反馈系数可调节的 反相器。调节反馈系数b=Rf/Ri,从而调节输出的电压 Uo。 3.连接好上述电路,全面检查线路后,先合上 ACCT-III 实验面板上的电源船形开关, 再合上 ACCT-II 面板上的船形开关,调整 PID 参数,使系统稳定,同时观测输出电压变化 情况。 4.在闭环系统稳定的情况下,外加干扰信号,系统达到无静差。如达不到,则根据 PID 参数对系统性能的影响重新调节 PID 参数。 5.改变给定信号,观察系统动态特性。
Uo
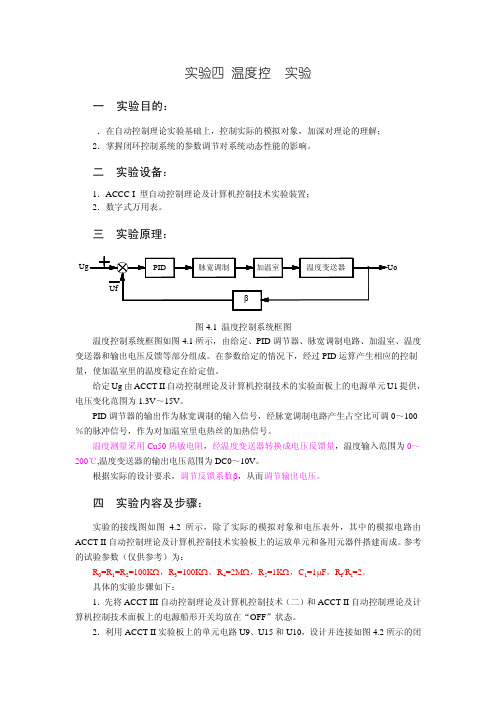
图 4.1 温度控制系统框图 温度控制系统框图如图 4.1 所示,由给定、PID 调节器、脉宽调制电路、加温室、温度 变送器和输出电压反馈等部分组成。在参数给定的情况下,经过 PID 运算产生相应的控制 量,使加温室里的温度稳定在给定值。 给定 Ug 由 ACCT-II 自动控制理论及计算机控制技术的实验面板上的电源单元 U1 提供, 电压变化范围为 1.3V~15V。 PID 调节器的输出作为脉宽调制的输入信号,经脉宽调制电路产生占空比可调 0~100 %的脉冲信号,作为对加温室里电热丝的加热信号。 温度测量采用 Cu50 热敏电阻,经温度变送器转换成电压反馈量,温度输入范围为 0~ 200℃,温度变送器的输出电压范围为 DC0~10V。 根据实际的设计要求,调节反馈系数b,从而调节输出电压。
温度控制系统实验报告
温度控制系统实验报告温度控制系统实验报告一、引言温度控制系统作为现代自动化领域的重要组成部分,广泛应用于工业生产、家电和环境控制等领域。
本实验旨在通过搭建一个简单的温度控制系统,了解其工作原理和性能特点。
二、实验目的1. 了解温度控制系统的基本原理;2. 掌握温度传感器的使用方法;3. 熟悉PID控制算法的应用;4. 分析温度控制系统的稳定性和响应速度。
三、实验装置本实验使用的温度控制系统由以下组件组成:1. 温度传感器:用于测量环境温度,常见的有热敏电阻和热电偶等;2. 控制器:根据温度传感器的反馈信号,进行温度控制;3. 加热器:根据控制器的输出信号,调节加热功率;4. 冷却装置:用于降低环境温度,以实现温度控制。
四、实验步骤1. 搭建温度控制系统:将温度传感器与控制器、加热器和冷却装置连接起来,确保各组件正常工作。
2. 设置控制器参数:根据实际需求,设置控制器的比例、积分和微分参数,以实现稳定的温度控制。
3. 测量环境温度:使用温度传感器测量环境温度,并将测量结果输入控制器。
4. 控制温度:根据控制器输出的控制信号,调节加热器和冷却装置的工作状态,使环境温度保持在设定值附近。
5. 记录数据:记录实验过程中的环境温度、控制器输出信号和加热器/冷却装置的工作状态等数据。
五、实验结果与分析通过实验数据的记录和分析,我们可以得出以下结论:1. 温度控制系统的稳定性:根据控制器的调节算法,系统能够在设定值附近维持稳定的温度。
但是,由于传感器的精度、控制器参数的选择等因素,系统可能存在一定的温度波动。
2. 温度控制系统的响应速度:根据实验数据,我们可以计算出系统的响应时间和超调量等参数,以评估系统的控制性能。
3. 温度传感器的准确性:通过与已知准确度的温度计进行对比,我们可以评估温度传感器的准确性和误差范围。
六、实验总结本实验通过搭建温度控制系统,探究了其工作原理和性能特点。
通过实验数据的分析,我们对温度控制系统的稳定性、响应速度和传感器准确性有了更深入的了解。
PID温度控制实验
PID 温度控制实验PID(ProportionalIntegralDerivative)控制是最早发展起来的控制策略之一,它根据系统的误差,利用比例、积分、微分计算出控制量对系统进行控制。
当我们不彻底了解一个系统和被控对象,或者不能通过有效的测量手段来获得系统参数时,最适合用 PID 控制技术。
由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制。
PID 调节控制是一个传统控制方法,它合用于温度、压力、流量、液位等几乎所有现场,不同的现场,仅仅是 PID 参数应设置不同,只要参数设置得当均可以达到很好的效果。
本实验以 PID 温度控制为例,通过此实验可以加深对检测技术、自动控制技术、过程控制等专业知识的理解。
2、掌握正校实验的方法,并用正交实验法来确定最佳 P、I、D 参数3、会求根据温度变化曲线求出相应的超调量、稳态误差和调节时间的方法二、仪器与用具加热装置、加热控制模块、单片机控制及显示模块、配套软件、电脑。
三、实验原理1、数字 PID 控制原理数字 PID 算法是用差分方程近似实现的,用微分方程表示的 PID 调节规律的理想算式为:1de(t)u(t)KP[e(t)e(t)dtTD] (1)TI0dt 单片机只能处理数字信号,上式可等价于:tTUnKP[enTIeii0nTD(enen1)] (2) TTTenD(en2en1en2)] (3) TIT (2) 式为位置式 PID 算法公式。
也可把(2)式写成增量式 PID 算法形式: UnUnUn1KP[enen1 其中,en 为第 n 次采样的偏差量; en-1 为第 n-1 次采样的偏差量; T 为采样周期; TI 为积分时间;TD 为微分时间; KP 为比例系数。
2、PID 温度控制的框图设定温度(SV)温度偏差(EV)(EV=SV-PV)PID 调节器按周期调节脉冲宽度输出加热装置实际温度(PV)图 1PID 温度控制的框图温度 PID 控制是一个反馈调节的过程:比较实际温度(PV)和设定温度(SV)的偏差,偏差值经过 PID 调节器运算来获得控制信号,由该信号控制加热丝的加热时间,达到控制加热功率的目的,从而实现对系统的温度控制。
温度控制实验技术的使用方法与调优技巧
温度控制实验技术的使用方法与调优技巧引言:温度控制是许多实验和工业过程中的重要环节。
不同实验室应用和工业生产过程中的温度要求各异,因此温度控制的准确性和稳定性对实验结果和工业产品的质量至关重要。
本文将介绍一些常见的温度控制实验技术的使用方法和调优技巧,帮助读者更好地掌握这一关键领域。
一、传统温度控制技术的使用方法1.1 温控仪的选择在常见的温度控制实验中,我们通常会使用温控仪来监测和控制温度。
选择适合实验需求的温控仪十分重要。
常见的温控仪有PID控制器、ON/OFF控制器等。
PID控制器通常能提供更精确的温度控制,而ON/OFF控制器则适用于对温度要求不是很高的实验。
1.2 温度传感器的安装和校准温度传感器是传统温度控制系统中不可或缺的组成部分。
在使用温度传感器前,我们需要确保其准确性和精度。
安装温度传感器时,避免其与外界环境发生热交换,防止测量误差的产生。
此外,定期对温度传感器进行校准是必不可少的步骤,以保证测量结果的准确性。
1.3 控制器参数的设定在使用传统温度控制技术时,我们需要设定一些控制器的参数,以实现对温度的准确控制。
常见的参数包括P(比例系数)、I(积分时间)和D(微分时间),它们的设定与实验要求和系统的惯性有关。
一般而言,P系数较大可提供较快的响应,而较小的I和D系数可使控制更加平稳。
在设定参数时,我们可以根据实验数据进行反复试验和调整,以达到最佳的控制效果。
二、现代温度控制技术的调优技巧2.1 模型预测控制(MPC)模型预测控制是一种基于系统动态模型的高级控制技术。
它可以根据系统的状态和被控对象的动态特性进行预测,并通过优化算法计算出最优的控制策略。
MPC技术在温度控制中的应用越来越广泛,可以提供更高的控制精度和鲁棒性。
2.2 自适应控制自适应控制技术能够根据被控对象的动态变化和环境条件的变化,在控制过程中自动地调整控制算法和参数。
与传统方法相比,自适应控制能够更好地适应不确定性和变化性,提供更加稳定和精确的温度控制。
温度控制实验报告
温度控制实验报告温度控制实验报告引言:温度控制是现代科技中的一个重要领域,涉及到许多实际应用,如工业生产、环境保护和生物医学等。
本实验旨在探索温度控制的原理和方法,并通过实验验证不同控制策略的效果。
通过这个实验,我们将更深入地了解温度控制的重要性和应用。
实验目的:本实验的目的是研究不同温度控制策略对温度稳定性的影响,并找到最佳的控制方法。
通过实验数据的分析和对比,我们将评估不同控制策略的优劣,并探讨其适用范围和局限性。
实验装置:本实验使用了一个温度控制系统,包括温度传感器、控制器和加热装置。
温度传感器用于测量环境温度,控制器根据传感器的反馈信号调整加热装置的输出,以达到设定的目标温度。
实验步骤:1. 实验前准备:a. 搭建温度控制系统,确保各部件连接正确并工作正常。
b. 设置实验参数,包括目标温度和控制策略。
2. 实验一:比例控制器a. 将控制器设置为比例控制模式。
b. 将目标温度设定为25摄氏度,并记录实际温度的变化。
c. 分析实验数据,评估比例控制器的控制效果。
3. 实验二:积分控制器a. 将控制器设置为积分控制模式。
b. 将目标温度设定为25摄氏度,并记录实际温度的变化。
c. 分析实验数据,评估积分控制器的控制效果。
4. 实验三:比例积分控制器a. 将控制器设置为比例积分控制模式。
b. 将目标温度设定为25摄氏度,并记录实际温度的变化。
c. 分析实验数据,评估比例积分控制器的控制效果。
实验结果与讨论:通过对实验数据的分析,我们得出以下结论:1. 比例控制器能够在一定程度上稳定温度,但存在超调和震荡的问题。
这是因为比例控制器只根据当前误差进行调整,无法预测未来的变化。
2. 积分控制器能够消除比例控制器的超调和震荡问题,但可能导致温度的调整速度较慢。
这是因为积分控制器会根据过去的误差进行调整,以消除累积误差。
3. 比例积分控制器结合了比例和积分控制的优点,能够在一定程度上稳定温度并提高调整速度。
温度控制器实验报告

温度控制器实验报告目录一、实验概述 (2)1. 实验目的 (2)2. 实验设备与材料 (2)3. 实验原理 (3)二、实验内容与步骤 (4)1. 实验内容 (5)1.1 温度控制器的基本操作 (6)1.2 温度控制器的参数设置与调整 (7)2. 实验步骤 (8)2.1 安装温度控制器 (9)2.2 校准温度计 (9)2.3 设置温度控制器参数 (11)2.4 观察并记录实验数据 (13)2.5 分析实验结果 (13)三、实验数据与结果分析 (14)1. 实验数据 (15)1.1 温度控制器的温度读数 (17)1.2 温度控制器的设定温度 (18)1.3 温度控制器的实际输出温度 (19)2. 结果分析 (19)2.1 温度控制器的性能评价 (20)2.2 温度控制器在不同条件下的适应性分析 (21)四、实验结论与建议 (22)1. 实验结论 (23)2. 实验建议 (24)一、实验概述本实验旨在通过设计和制作一个温度控制器,让学生了解温度控制器的基本原理、结构和工作原理,并掌握温度控制器的制作方法。
学生将能够熟练掌握温度控制器的设计、制作和调试过程,为今后从事相关领域的工作打下坚实的基础。
本实验的主要内容包括,在实验过程中,学生将通过理论学习和实际操作相结合,全面掌握温度控制器的相关知识和技能。
1. 实验目的本实验旨在探究温度控制器的性能及其在实际应用中的表现,通过一系列实验,了解温度控制器的控制原理、操作过程以及性能特点,验证其在实际环境中的温度控制精度和稳定性。
本实验也旨在培养实验者的实践能力和问题解决能力,为后续相关领域的深入研究和实践打下坚实的基础。
2. 实验设备与材料温度控制器:作为实验的核心设备,本实验选择了高精度数字式温度控制器,具备较高的稳定性和精确度,能够确保实验结果的可靠性。
恒温箱实验箱:为了模拟不同的环境温度,采用了具有温控功能的恒温箱或实验箱。
通过调节箱内的温度,可以观察温度控制器在不同环境下的表现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
data ends
CODE SEGMENT ASSUME CS:CODE,ds:data START: mov ax,data mov ds,ax PUSH DS MOV DX,MY8255_MODE ;初始化8255工作方式 MOV AL,80H OUT DX,AL MOV DX,MY8255_b MOV AL,0H OUT DX,AL cli mov al,1ch mov ah,35h int 21h ;取中断矢量 ;初始化8255工作方式 ;工作方式0,A口输出,B口输入 ;工作方式0,A口输出,B口输入
实验六 温度控制实验
6.1 实验目的
1.了解温度的闭环控制方法 2.掌握 PID 控制规律及算法
6.2 实验内容
1.绘制输出的飞升曲线,即断开数字调节器,使系统工作在 手动状态下。在输入端加一幅度适宜的阶跃控制信号,记录 输出端的变化。在坐标纸上绘制温度曲线,作切线,求得被 控对象滞后时间θ及惯性时间常数T。进而求出控制器的参数 T、Kp、TI和TD。 2.用 8255 的 B 口作为控制信号,通过对 A / D 转换结果反 馈量的运算,调节控制信号,达到控制温度保持在一定范围 内的作用。并在屏幕上显示给定和当前温度值。在坐标纸上 绘制闭环控制温度曲线,并求出超调量、调节时间和稳态误 差。
mov cs1c, es mov ip1c, bx
mov ax, seg INT0A
mov ds, ax mov dx, offset INT0A mov al,1ch mov ah, 25h int 21h POP DS
;修改中断矢量
MOV DX,PC8254_MODE
;初始化PC机定时器0,定10ms
;功能号AH = 35H
;出口参数 ES:BX=中断服务程序入口地址
;***************根据CHECK配置信息修改下列符号值******************* IOY0 EQU 0d200H ;片选IOY0对应的端口始地址 IOY1 EQU 0d240H ;片选IOY1对应的端口始地址 ;***************************************************************** MY8255_A EQU IOY0+00H*4 ;8255的A口地址 MY8255_B EQU IOY0+01H*4 ;8255的B口地址 MY8255_C EQU IOY0+02H*4 ;8255的C口地址 MY8255_MODE EQU IOY0+03H*4 ;8255的控制寄存器地址 PC8254_COUNT0 EQU 40H ;PC机内8254定时器0端口地址 PC8254_MODE EQU 43H ;PC机内8254控制端口地址 AD0809 EQU IOY1+00H*4 ;AD0809端口地址 STACK1 SEGMENT STACK DW 256 DUP(?) STACK1 ENDS
;A/D 采样
;A/D 采样, 结果放在ADZ中
LEA DX,MES0 MOV AH,9 INT 21H mov al, TIME CALL DSP_AL LEA DX,MES1 MOV AH,9 INT 21H MOV AL,ADZ MOV BL,100
;DISPLAY TIME=**
;DISPLAY TIME ;DISPLAY TIME ;DISPLAY TEMPREATURE=
;DISPLAY TMP
;PID CONTROL ;OUTPUT LIMIT ;DISPLAY CONTROL
;/**************************** 作响应曲线 ******************************/ mov pout, 200 ;/**********************************************************************/ MOV AL,POUT CALL DSP_AL ;DISPLAY CONTOL VARRITY CALL CRLF ;回车、换行 inc TIME MOV AH,0BH ;ANY KEY PRESSED? INT 21H ;THEN TO DOS INC AL JZ PPP2 JMP PPP ;ELSE CONTINUE PPP2: MOV DX,MY8255_b ;STOP HEATING MOV AL,0 OUT DX,AL mov ax, cs1c mov ds,ax mov dx, ip1c mov ax,251ch int 21h MOV AX,4C00H INT 21H
PID
PROC NEAR MOV AX,UR MOV BL,ADZ MOV BH,0 CLC SBB AX,BX MOV SI,OFFSET E0 MOV [SI],AX MOV BX,KP IMUL BX MOV SI,OFFSET PPK MOV [SI],AX MOV [SI+2],DX MOV SI,OFFSET E0 MOV AX,[SI] MOV BX,KI IMUL BX MOV SI,OFFSET PIK1
data SEGMENT UR EQU 40 KP EQU 0880H KI EQU 0080H KD EQU 0H E0 DW 0 E1 DW 0 PPK DW 2 DUP(?) PK DW 2 DUP(?) PIK1 DW 2 DUP(?) ADZ DB ? POUT DB 0 CNT DB 0 TIME DB 1 MES0 DB 'TIME=$' MES1 DB ' TEMPREATURE=$' MES2 DB ' CONTROL=$' cs1c dw ? ip1c dw ?
6.4
实验参考线路图
伪中断( INT 1CH )包含在 IBM PC及PC/XT BIOS定时器中断 INT 8H的 服务程序中,称为伪中断,也称为 INT 8H 的扩展功能。INT 1CH的唯一功能是 立即返回INT 8H 。由于INT 8H 被CPU每秒执行18.2次,故 INT 1CH 每秒也被 执行 18.2 次。用户利用 INT 1CH 定时执行的特点,改变 INT 1CH 的中断矢量, 使之指向用户编写的定时操作程序,即可使CPU 在运行主程序过程中定时完成 指定的操作,如图 3.4.6 所示。
6.3
实验原理
本实验要求使用8255的PB0脉冲信号作为温控单元的控制量。温度的 变化由热敏电阻转化为电压的变化,再通过 ADC0809转化为数字量, CPU从总线上读到数据,通过查询给定的温度表即得到当前温度值。并由 PC机内部定时器0号通道,设置为输出10ms方波,作为采样时钟。温控单 元中由7805芯片产生+5V的稳定电压和一个24欧的大功率电阻构成回路, 回路电流较大使7805芯片发热产生热源。实验电路中采用的是NTCMF58103型10K热敏电阻。热敏电阻的电阻值随看温度的变化而变化,使得与 AD端子连接的IN7的电压在5V内变化。 在参考程序中给出了一个经验温度数据表。测出的 AD 值是该数据表 的相对偏移,利用这个值就可以找到相应的温度值。例如测出的 AD 值为 5AH ( 90 ) ,在数据表中第 90 个数为 64H , 即就得出了温度值: 100 ℃ 。
CALL HEX_BCD ;CONVERT TO BCD
;CONVERT TO TEMPREATURE
MUL BL
MOV BL,255 DIV BL
CALL HEX_BCD
;CONVERT TO BCD
CALL DSP_AL
CALL PID CALL LIMIT LEA DX,MES2 MOV AH,9 INT 21H MOV DX,MY8255_B MOV AL,0 CMP POUT,0 JE M2 MOV AL,1 M2: OUT DX,AL ;OUT4H, 14H, 14H, 14H, 14H, 14H, 14H, 14H DB 15H, 16H, 17H, 18H, 19H, 1AH, 1BH, 1CH, 1DH, 1EH DB 1EH, 1FH, 20H, 21H, 23H, 24H, 25H, 26H, 27H, 28H DB 29H, 2AH, 2BH, 2CH, 2DH, 2EH, 2FH, 31H, 32H, 32H DB 33H, 34H, 35H, 36H, 37H, 38H, 39H, 3AH, 3BH, 3CH DB 3DH, 3EH, 3FH, 40H, 42H, 43H, 44H, 45H, 46H, 47H DB 48H, 49H, 4AH, 4BH, 4CH, 4DH, 4EH, 4FH, 50H, 4FH DB 50H, 51H, 52H, 53H, 54H, 55H, 56H, 57H, 58H, 59H DB 5AH, 5BH, 5CH, 5DH, 5EH, 5FH, 60H, 61H, 62H, 63H DB 64H, 64H, 65H, 65H, 66H, 66H, 67H, 68H, 69H, 6AH DB 6BH, 6CH, 6DH, 6EH, 6EH, 6FH, 6FH, 70H, 71H, 72H DB 73H, 74H, 75H, 76H, 77H, 78H, 79H, 7AH, 7BH, 7CH DB 7DH, 7EH, 7FH, 80H, 81H, 82H, 83H, 84H, 84H, 85H DB 86H, 87H, 88H, 89H, 8AH, 8BH, 8CH, 8EH, 8FH, 90H DB 91H, 92H, 93H, 94H, 95H, 96H, 97H, 98H, 99H, 9AH DB 9BH, 9BH, 9CH, 9CH, 9DH, 9DH, 9EH, 9EH, 9FH, 9FH DB 0A0H,0A1H,0A2H,0A3H,0A4H,0A5H,0A6H,0A7H,0A8H,0A9H DB 0AAH,0ABH,0ACH,0ADH,0AEH,0AFH,0B0H,0B0H,0B1H,0B2H DB 0B3H,0B4H,0B4H,0B5H,0B6H,0B7H,0B8H,0B9H,0BAH,0BBH DB 0BDH,0BEH,0BEH,0C1H,0C2H,0C3H,0C4H,0C5H,0C6H,0C8H DB 0CAH,0CCH,0CEH,0CFH,0D0H,0D1H,0D2H,0D4H,0D5H,0D6H DB 0D7H,0D8H,0D9H,0DAH,0DBH,0DCH,0DDH,0DEH,0E3H,0E6H DB 0E9H,0ECH,0F0H,0F2H,0F6H,0FAH,0FFH,0FFH,0FFH,0FFH DB 0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH DB 0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH DB 0FFH,0FFH,0FFH,0FFH,0FFH,0FFH